Beam Control and Adaptive Optics for Directed Energy
1. Introduction to Directed Energy Systems
1.1 Fundamentals of Directed Energy Technologies
Directed energy (DE) technologies focus on producing and controlling energy in a directed form to achieve specific effects at a distance. Unlike conventional kinetic weapons, which rely on physical projectiles, DE systems use electromagnetic energy or particle beams to interact with targets. The core categories of DE technologies include high-energy lasers, high-power microwaves, and particle beams. Each has distinct physical principles, operational mechanisms, and application challenges.
Types of Directed Energy Technologies
-
High-Energy Lasers (HELs): These systems generate coherent light beams with high power density. The beam can be focused on a target to induce heating, ablation, or structural damage. HELs operate across various wavelengths, typically in the near-infrared to visible spectrum.
-
High-Power Microwaves (HPMs): HPMs emit electromagnetic radiation in the microwave frequency range. They primarily disrupt electronic systems by inducing voltage spikes or damaging circuitry.
-
Particle Beams: These involve streams of charged or neutral particles accelerated to high velocities. Particle beams interact with matter through ionization and momentum transfer.
Basic Physical Principles
Directed energy systems rely on controlling the generation, amplification, and propagation of energy. For lasers, this involves stimulated emission in gain media, optical resonators, and beam shaping optics. Microwave systems use antennas, waveguides, and amplifiers to produce focused electromagnetic fields. Particle beams depend on particle accelerators and magnetic or electrostatic focusing elements.
Mind Map: Directed Energy Technologies Overview
Energy Generation and Beam Control
In all DE systems, energy generation must be stable and controllable. For lasers, this means managing the pump source and gain medium to maintain consistent output power and beam quality. Beam control includes steering, focusing, and compensating for distortions caused by the environment or system imperfections.
Example: Simple Laser Setup
Consider a laboratory solid-state laser producing a continuous-wave beam at 1064 nm. The gain medium is a Nd:YAG crystal pumped by a diode laser. The optical resonator consists of two mirrors: one fully reflective and one partially transmissive. The output beam is collimated and directed onto a test target. This setup illustrates the basic components and operation of a HEL system on a small scale.
Energy Delivery and Interaction with Targets
The effectiveness of a DE system depends on how energy is delivered and absorbed by the target. For lasers, absorption leads to heating and potential material damage. The beam’s spatial profile, power density, and exposure time determine the interaction outcome. For microwaves, the focus is on inducing electrical effects rather than thermal damage.
Mind Map: Key Factors in Directed Energy Effectiveness
Practical Considerations
Directed energy systems must address challenges such as beam stability, thermal distortion, and atmospheric interference. Maintaining beam coherence and focus over distance requires adaptive optics and precise control mechanisms. Thermal management is critical to prevent degradation of optical components.
Example: Atmospheric Impact on Beam Propagation
A laser beam traveling through the atmosphere experiences scattering, absorption, and turbulence-induced wavefront distortions. Adaptive optics can measure and correct these distortions in real time, improving beam focus on the target. This example highlights the interplay between beam control and environmental factors.
In summary, directed energy technologies convert electrical or chemical energy into focused electromagnetic or particle beams. Understanding their physical principles, components, and operational challenges lays the foundation for effective beam control and adaptive optics strategies.
1.2 Overview of Beam Control Principles
Beam control is the set of techniques and technologies used to direct, stabilize, and shape a laser beam to achieve desired performance in directed energy applications. At its core, beam control ensures that the laser energy reaches the target accurately and efficiently, compensating for disturbances and imperfections along the way.
Core Concepts of Beam Control
Beam control involves managing the beam’s direction, phase, amplitude, and wavefront quality. These parameters determine how well the beam maintains focus, alignment, and power delivery over distance.
- Beam Steering: Adjusting the beam’s pointing direction to hit a target precisely.
- Wavefront Correction: Fixing distortions in the beam’s phase front to improve focus and reduce spreading.
- Stabilization: Minimizing jitter and drift caused by mechanical vibrations or environmental factors.
- Power Distribution Control: Shaping the beam’s intensity profile to optimize energy delivery.
Mind Map: Key Elements of Beam Control
Beam Steering
Beam steering is the process of changing the beam’s direction to align with the target. It can be achieved using mechanical or electro-optical devices. Mechanical mirrors, such as gimbaled mounts, offer coarse pointing but are slower. Fast steering mirrors (FSM) use piezoelectric or voice coil actuators to provide rapid, fine angular adjustments.
Example: A directed energy system tracking a moving drone uses an FSM to adjust the beam angle in real time, compensating for target motion and platform vibrations.
Wavefront Correction
Laser beams often suffer from wavefront distortions caused by atmospheric turbulence, thermal gradients, or imperfections in optical components. Adaptive optics systems use wavefront sensors to detect these distortions and deformable mirrors to correct them, restoring beam quality.
Example: In a high-power laser, thermal lensing in the gain medium distorts the wavefront. An adaptive optics system measures the distortion and adjusts a deformable mirror to flatten the wavefront, maintaining focus on the target.
Stabilization
Mechanical vibrations and environmental disturbances can cause the beam to jitter or drift, reducing accuracy. Stabilization involves isolating the system from vibrations and using feedback control loops to correct beam position and angle.
Example: A laser mounted on a vehicle experiences vibrations from the engine and terrain. Accelerometers detect these vibrations, and a control system adjusts the steering mirrors to keep the beam steady.
Power Distribution Control
Controlling the spatial intensity profile of the beam can improve energy delivery and reduce unwanted effects like hot spots. Beam shaping optics or apodization filters modify the beam profile to suit the mission requirements.
Example: A laser used for material processing shapes the beam into a flat-top profile to ensure uniform energy distribution across the workpiece.
Mind Map: Beam Control Feedback Loop
Practical Example: Closed-Loop Beam Control
Consider a laser system tasked with maintaining beam alignment on a distant target despite platform motion and atmospheric turbulence. A position sensor detects beam deviation, feeding data to a controller that calculates correction signals. These signals drive fast steering mirrors and deformable mirrors to adjust beam direction and wavefront shape. The loop runs continuously, keeping the beam stable and focused.
This example highlights how beam control integrates sensing, computation, and actuation to maintain performance.
In summary, beam control principles revolve around detecting disturbances, computing corrections, and applying those corrections through mechanical or optical means. The combination of steering, wavefront correction, stabilization, and power shaping ensures that directed energy systems deliver precise and reliable performance.
1.3 Role and Importance of Adaptive Optics
Adaptive optics (AO) is a technology designed to improve the performance of optical systems by correcting distortions in real time. In directed energy applications, AO plays a critical role in maintaining beam quality and precision, especially when the beam travels through turbulent or otherwise imperfect media. Without adaptive optics, the beam can become distorted, leading to reduced focus, decreased power density on target, and overall loss of effectiveness.
Why Adaptive Optics Matters
When a laser beam passes through the atmosphere, it encounters variations in temperature, pressure, and humidity. These variations cause the refractive index of air to fluctuate, which distorts the wavefront of the beam. The wavefront is essentially the shape of the light wave as it propagates. Distortions in the wavefront translate into a beam that is no longer tightly focused, reducing the energy delivered to the target.
Adaptive optics systems detect these distortions and apply compensations, typically by deforming a mirror or modulating a spatial light modulator, to restore the wavefront to its ideal shape. This correction happens continuously and rapidly, often hundreds or thousands of times per second.
Core Functions of Adaptive Optics in Directed Energy
- Wavefront Sensing: Measuring the distortions in the beam caused by atmospheric or system-induced aberrations.
- Wavefront Correction: Adjusting optical elements to counteract the measured distortions.
- Feedback Control: Using real-time data to continuously update corrections and maintain beam quality.
Mind Map: Role of Adaptive Optics
Practical Example: Correcting Atmospheric Turbulence
Consider a high-energy laser system aimed at a target several kilometers away. As the beam travels, atmospheric turbulence causes the beam to spread and wander. A Shack-Hartmann wavefront sensor samples the incoming distorted wavefront, detecting local tilts and deformations. This information feeds into a control system that commands a deformable mirror to adjust its surface shape, effectively ‘flattening’ the wavefront. The result is a beam that remains tightly focused on the target, maximizing energy delivery.
Mind Map: Benefits of Adaptive Optics in Directed Energy
Example: Thermal Distortion Compensation
High-power laser components heat unevenly during operation, causing thermal lensing—an effect that changes the optical path length and distorts the beam. Adaptive optics can detect these distortions internally and adjust the deformable mirror accordingly. For instance, in a laboratory setup, a thermal gradient introduced by a heated glass plate causes a measurable wavefront distortion. The AO system senses this and compensates, restoring the beam’s original focus and shape.
Summary
Adaptive optics is essential for maintaining beam integrity in directed energy systems. By sensing and correcting wavefront distortions caused by atmospheric turbulence, thermal effects, and system imperfections, AO ensures that the beam remains stable, focused, and effective. The technology integrates sensing, actuation, and control in a continuous loop, adapting to changing conditions in real time. This capability is fundamental to achieving precision targeting and maximizing the operational performance of directed energy platforms.
1.4 Key Performance Metrics: Stability, Thermal Effects, and Targeting
In directed energy systems, performance hinges on several measurable factors. Among these, stability, thermal effects, and targeting accuracy stand out as critical metrics. Understanding these metrics helps engineers design systems that maintain beam quality and precision under operational conditions.
Stability
Stability refers to the ability of the beam to maintain its intended path and shape over time. Instability can arise from mechanical vibrations, environmental disturbances, or control system imperfections. A stable beam ensures consistent energy delivery to the target.
- Beam Pointing Stability: Measures how well the beam maintains its direction. Even small angular deviations can cause the beam to miss the target at long distances.
- Beam Quality Stability: Refers to maintaining the beam’s spatial profile and intensity distribution.
- Temporal Stability: The consistency of beam parameters over time, including power fluctuations.
Example: Consider a laser mounted on a platform subject to wind gusts. Without active stabilization, the beam might jitter, causing energy to scatter. Implementing a feedback-controlled beam steering mirror can reduce pointing error from milliradians to microradians, improving hit probability.
Mind Map: Stability Metrics
Thermal Effects
Thermal effects stem from heat generated within optical components or the laser medium. Heat causes expansion, refractive index changes, and mechanical stress, all of which degrade beam quality.
- Thermal Lensing: Heat-induced refractive index gradients act like lenses, distorting the beam wavefront.
- Thermal Expansion: Physical deformation of optics shifts alignment and focus.
- Thermal Birefringence: Temperature gradients cause polarization changes, affecting beam coherence.
Managing thermal effects involves material selection, cooling strategies, and real-time compensation.
Example: A high-power laser amplifier heats its gain medium during operation. Without cooling, thermal lensing causes the beam to defocus. By integrating a water-cooled mount and adaptive optics, the system maintains a near-ideal beam profile.
Mind Map: Thermal Effects
Targeting Accuracy
Targeting accuracy measures how precisely the beam can be directed onto a desired point or object. It depends on the system’s ability to detect, track, and compensate for target motion and environmental disturbances.
- Acquisition Accuracy: Initial alignment of the beam with the target.
- Tracking Precision: Maintaining beam alignment as the target moves.
- Compensation for Disturbances: Adjusting for atmospheric turbulence, platform vibrations, and target dynamics.
Example: A ground-based directed energy system tracks a drone moving at 50 m/s. Using a combination of radar data and optical sensors, the system predicts the drone’s path and adjusts beam steering mirrors in real time, keeping the beam centered within a few centimeters.
Mind Map: Targeting Accuracy
Summary
These three metrics—stability, thermal effects, and targeting accuracy—interact closely. For example, thermal distortions can reduce stability and targeting precision. Effective beam control and adaptive optics systems monitor and correct these factors continuously. Real-world examples show that integrating feedback loops, thermal management, and advanced sensors can significantly improve directed energy performance.
1.5 Practical Example: Basic Beam Control Setup for a Laboratory Laser
Setting up a basic beam control system in a laboratory environment is a foundational exercise for understanding directed energy applications. This example walks through the essential components, their arrangement, and how to achieve stable beam propagation with minimal distortion.
Components Overview
- Laser Source: A continuous-wave (CW) diode laser emitting at 635 nm, power output around 5 mW.
- Beam Expander: To increase beam diameter and reduce divergence.
- Steering Mirrors: Two motorized mirrors for angular adjustment.
- Position Sensitive Detector (PSD): To detect beam position deviations.
- Controller Unit: Microcontroller or PC interface to process feedback and adjust mirrors.
- Mounting Hardware: Optical breadboard, posts, and mounts for stable alignment.
Step 1: Initial Alignment
Begin by mounting the laser securely on the optical table. Use the beam expander immediately after the laser to widen the beam, which helps reduce divergence and makes control easier. Align the beam so it travels parallel to the table surface.
Place the first steering mirror in the beam path. Adjust it so the beam reflects toward the second steering mirror, which then directs the beam onto the PSD. The PSD should be positioned at a known distance to measure beam displacement accurately.
Step 2: Establishing the Feedback Loop
The PSD outputs voltage signals proportional to the beam position on its surface. These signals feed into the controller unit, which compares the current beam position to a reference (centered spot).
The controller calculates the necessary corrections and sends commands to the motorized mirrors to adjust their angles, steering the beam back toward the reference position. This forms a closed-loop feedback system.
Step 3: Calibration
Calibrate the PSD by moving the beam spot deliberately using the steering mirrors and recording the corresponding voltage outputs. This creates a voltage-to-position mapping.
Similarly, calibrate the mirror actuators by applying known voltage inputs and measuring angular displacement, ensuring the controller’s commands translate accurately into physical movements.
Step 4: Testing Stability
Introduce small disturbances by gently tapping the optical table or slightly misaligning a mirror. Observe how the feedback system responds to restore the beam position.
Monitor the beam spot on the PSD over time to quantify stability. A well-tuned system will keep the beam within a fraction of a millimeter from the reference point.
Mind Map: Basic Beam Control Setup
Mind Map: Feedback Loop Operation
Example: Correcting Beam Drift
Suppose the beam drifts due to thermal expansion causing a mirror mount to shift slightly. The PSD detects the beam spot moving off-center, sending a voltage change to the controller. The controller calculates the error and sends a command to the first steering mirror to adjust its angle by 0.01 degrees. This small correction realigns the beam onto the PSD center, restoring the desired path.
Practical Tips
- Use stable mounts and minimize vibrations to reduce the workload on the control system.
- Keep cables organized to avoid accidental disturbances.
- Regularly check calibration to maintain accuracy.
- Start with slow feedback gains to prevent oscillations, then increase as stability improves.
This basic setup illustrates the core principles of beam control: detecting deviations, processing feedback, and applying corrections. It provides a hands-on understanding of how stability is maintained in more complex directed energy systems.
2. Beam Propagation and Atmospheric Effects
2.1 Physics of Beam Propagation in Various Media
Beam propagation describes how a beam of light travels through different environments. Understanding this is essential for directed energy systems because the medium affects beam shape, intensity, and focus. The main media we consider are free space (vacuum or air), atmospheric layers, and optical materials like glass or fiber.
Basic Concepts
- Wave Nature of Light: Light behaves as an electromagnetic wave characterized by wavelength, frequency, and amplitude.
- Ray Optics Approximation: When the beam size is much larger than the wavelength, light can be treated as rays traveling in straight lines unless refracted or reflected.
- Diffraction: Even in free space, beams spread due to diffraction, limiting how tightly they can be focused.
Propagation in Free Space
In vacuum or ideal free space, a beam spreads primarily due to diffraction. The beam divergence angle θ for a Gaussian beam is approximately:
\[ \theta \approx \frac{\lambda}{\pi w_0} \]
where \(\lambda\) is the wavelength and \(w_0\) is the beam waist radius.
Example: A 1 µm wavelength laser with a 1 mm beam waist will have a divergence of about 0.3 milliradians. Over 1 km, this results in a beam diameter increase of roughly 0.6 m.
Propagation in Atmospheric Media
Atmosphere is not uniform; it contains temperature gradients, humidity, and particles. These cause:
- Refraction: Changes in refractive index bend the beam.
- Scattering: Particles scatter light, reducing intensity.
- Turbulence: Random fluctuations in refractive index cause beam wander and distortion.
Refractive Index Variations
The refractive index \(n\) of air depends on pressure, temperature, and humidity. Small changes cause beam bending, especially over long distances or near the ground.
Turbulence Effects
Turbulence creates pockets of varying refractive index. This results in:
- Beam Wander: Random lateral shifts.
- Beam Spreading: Increased divergence beyond diffraction.
- Scintillation: Intensity fluctuations.
Propagation in Optical Materials
When beams travel through lenses, windows, or fibers, the medium’s refractive index and absorption matter.
- Refraction: Governed by Snell’s law, changes beam direction.
- Absorption: Converts some light to heat, potentially causing thermal lensing.
- Dispersion: Different wavelengths travel at different speeds, affecting pulse shape.
Example: A high-power laser passing through a glass window may experience slight beam distortion due to thermal gradients formed by absorption.
Mind Map: Factors Affecting Beam Propagation
Mind Map: Atmospheric Turbulence Effects
Practical Example: Beam Propagation Through Fog
Fog consists of tiny water droplets that scatter light. When a directed energy beam passes through fog:
- Scattering reduces beam intensity. The beam loses power as photons are deflected.
- Beam profile changes. The beam becomes less coherent and more diffuse.
If a 10 kW laser beam with a 5 cm diameter passes through 100 meters of dense fog, the intensity at the target can drop by over 50%. This requires compensating with increased power or adaptive optics to maintain effectiveness.
Summary
Beam propagation depends strongly on the medium. Free space propagation is limited mainly by diffraction. Atmospheric propagation adds complexity through turbulence and scattering. Optical materials introduce refraction, absorption, and dispersion. Each factor affects beam quality and targeting precision, making an understanding of these physics essential for effective beam control and adaptive optics in directed energy systems.
2.2 Atmospheric Turbulence and Its Impact on Beam Quality
Atmospheric turbulence is a key factor that degrades the quality of laser beams propagating through the air. It arises from random fluctuations in the refractive index caused by temperature and pressure variations in the atmosphere. These fluctuations create pockets of air with different densities, which act like tiny lenses, distorting the beam as it travels.
What Causes Atmospheric Turbulence?
The atmosphere is rarely uniform. Sunlight heats the ground unevenly, causing warm air to rise and mix with cooler air. Wind patterns and weather conditions add complexity. This constant churning leads to small-scale variations in temperature and pressure, producing refractive index changes.
Effects on Beam Quality
Turbulence impacts beam quality in several ways:
- Wavefront Distortion: The beam’s phase front becomes irregular, causing the beam to lose focus and spread out.
- Beam Wander: The entire beam shifts randomly in position, making it harder to keep on target.
- Scintillation: Rapid fluctuations in beam intensity, producing a flickering effect.
- Beam Spreading: The beam diameter increases beyond diffraction limits, reducing power density.
These effects reduce the beam’s ability to deliver energy precisely and efficiently.
Mind Map: Atmospheric Turbulence Effects
Quantifying Turbulence: The Structure Constant (C_n^2)
The strength of turbulence is often described by the refractive index structure constant, (C_n^2), which varies with altitude and environmental conditions. Higher (C_n^2) values mean stronger turbulence and greater beam distortion.
Practical Example: Beam Wander in a Coastal Environment
Imagine a directed energy system operating near the coast on a sunny day. Warm air over the land rises and mixes with cooler sea air, creating strong turbulence layers. The beam experiences noticeable lateral shifts, sometimes moving several centimeters off the intended path over a few hundred meters. This beam wander requires active beam steering to maintain accuracy.
Mind Map: Managing Beam Wander
Wavefront Distortion and Adaptive Optics
Wavefront distortion breaks the beam’s coherence. Adaptive optics systems use wavefront sensors and deformable mirrors to measure and correct these distortions in real time, restoring beam focus and reducing spreading.
Practical Example: Adaptive Optics in a Desert Environment
In a desert setting, daytime heating causes strong turbulence near the ground. A laser beam aimed at a distant target suffers from phase distortions that blur the spot. By employing an adaptive optics system, the wavefront errors are corrected, sharpening the beam and improving energy delivery.
Scintillation: Flickering Intensity
Scintillation results from interference patterns created by multiple refractive index fluctuations along the beam path. It causes rapid intensity fluctuations that can affect sensor readings and reduce effective power.
Mind Map: Scintillation Characteristics
Summary
Atmospheric turbulence is an unavoidable factor in beam propagation outdoors. Understanding its causes and effects—wavefront distortion, beam wander, scintillation, and beam spreading—is essential for designing effective beam control and adaptive optics systems. Real-world examples show how environmental conditions influence beam behavior and how targeted mitigation strategies improve performance.
2.3 Scintillation, Beam Wander, and Beam Spreading
When a laser beam travels through the atmosphere, it encounters fluctuations in temperature, pressure, and humidity. These variations cause changes in the refractive index of air, which in turn affect the beam’s propagation. Three key phenomena arise from these atmospheric effects: scintillation, beam wander, and beam spreading. Understanding each is crucial for effective beam control in directed energy systems.
Scintillation
Scintillation refers to rapid fluctuations in the intensity of the beam as it reaches the target or a detector. These intensity variations occur because of small-scale turbulence cells in the atmosphere that cause the beam to focus and defocus randomly.
- Cause: Turbulent eddies with sizes smaller than or comparable to the beam diameter create constructive and destructive interference patterns.
- Effect: The beam intensity appears to flicker or twinkle, similar to stars seen from Earth.
Mind Map: Scintillation
Example:
Imagine pointing a laser pointer at a distant wall on a hot day. The spot on the wall appears to shimmer or flicker. This is a simple example of scintillation caused by air heated near the ground creating turbulent cells.
Beam Wander
Beam wander is the slow, random movement of the beam centroid caused by larger turbulent eddies in the atmosphere. Unlike scintillation, which affects intensity, beam wander shifts the entire beam position.
- Cause: Large-scale turbulence cells (larger than the beam diameter) refract the beam path differently over time.
- Effect: The beam’s center moves around unpredictably, causing pointing errors.
Mind Map: Beam Wander
Example:
Consider a high-power laser system aiming at a distant drone. Due to beam wander, the laser spot shifts around the target area, requiring active beam steering to maintain lock.
Beam Spreading
Beam spreading refers to the increase in beam diameter as it propagates through the atmosphere, beyond what diffraction alone would cause. Turbulence causes the beam to lose coherence and diverge more than expected.
- Cause: Random phase distortions from atmospheric turbulence cause the beam wavefront to distort.
- Effect: The beam covers a larger area, reducing intensity on target.
Mind Map: Beam Spreading
Example:
A laser beam fired over several kilometers on a humid day will have a larger spot size on the target than predicted by diffraction alone, reducing its effectiveness for precision tasks.
Interactions and Combined Effects
Scintillation, beam wander, and beam spreading often occur simultaneously. For example, beam wander can cause the beam to move into regions of stronger turbulence, increasing scintillation and spreading. Effective beam control requires addressing all three phenomena together.
Mind Map: Combined Atmospheric Effects on Beam
Summary
- Scintillation causes rapid intensity fluctuations due to small-scale turbulence.
- Beam wander shifts the beam position because of large-scale turbulence.
- Beam spreading enlarges the beam diameter beyond diffraction limits due to wavefront distortions.
Each effect reduces beam quality and targeting precision in directed energy systems. Practical mitigation involves a combination of adaptive optics, fast steering mechanisms, and careful system design.
Practical Example: Real-Time Correction of Beam Wander and Scintillation
In a ground-to-air laser communication system, sensors detect beam position shifts (beam wander) and intensity fluctuations (scintillation). A fast steering mirror corrects beam pointing at kilohertz rates, while an adaptive optics system adjusts the wavefront to reduce scintillation and spreading. This combined approach maintains a stable, high-quality beam on a moving aerial target despite atmospheric turbulence.
2.4 Best Practices for Mitigating Atmospheric Distortions
Atmospheric distortions are a major hurdle for directed energy systems, as they degrade beam quality and reduce targeting precision. These distortions mainly arise from turbulence, temperature gradients, and varying humidity. The goal is to minimize their impact through a combination of system design, real-time correction, and operational strategies. Below, we explore practical approaches with clear examples and mind maps to organize the concepts.
Understanding the Problem
Atmospheric distortions affect beam propagation by causing wavefront aberrations, beam wander, and intensity fluctuations. These effects vary with distance, weather, and time of day. Recognizing the specific distortion types helps in choosing the right mitigation techniques.
Mind Map: Atmospheric Distortions and Their Effects
Site Selection and Environmental Control
Choosing the right location and controlling the environment around the system can reduce distortions before they start. For example, elevated platforms reduce ground-layer turbulence. Enclosures or wind screens can limit airflow disturbances.
Example: A directed energy test range positioned on a hilltop experiences less low-altitude turbulence, improving beam stability compared to a valley location.
Beam Path Management
Shortening the beam path through turbulent air reduces distortion. When possible, operating at times with stable atmospheric conditions (e.g., early morning or late evening) helps.
Example: Scheduling laser firings during nighttime reduces thermal gradients caused by solar heating, resulting in fewer beam aberrations.
Adaptive Optics (AO) Integration
AO systems actively measure and correct wavefront distortions in real time using wavefront sensors and deformable mirrors. This is the most direct method to counter atmospheric effects.
Example: A high-power laser system uses a Shack-Hartmann wavefront sensor feeding corrections to a deformable mirror, maintaining beam focus on a distant target despite turbulence.
Beam Shaping and Spatial Filtering
Using spatial filters and beam shaping optics can reduce the impact of distortions by cleaning the beam profile and controlling its divergence.
Example: Implementing a pinhole spatial filter removes higher-order mode distortions before the beam exits the system, resulting in a cleaner, more stable beam.
Multi-Conjugate Adaptive Optics (MCAO)
For longer paths or layered turbulence, MCAO uses multiple deformable mirrors conjugated to different atmospheric layers, improving correction over a larger volume.
Example: A system with two deformable mirrors corrects distortions at ground level and mid-altitude layers, enhancing beam quality over a 5 km path.
Predictive Control Algorithms
Incorporating predictive models into AO control loops helps compensate for system latency and rapidly changing turbulence.
Example: A Kalman filter-based controller predicts wavefront changes milliseconds ahead, allowing the deformable mirror to preemptively adjust.
Thermal Blooming Mitigation
Thermal blooming occurs when the beam heats the air, causing refractive index changes that distort the beam. Techniques include reducing beam intensity, using pulsed operation, or employing adaptive optics to compensate.
Example: Operating a high-energy laser in pulsed mode with short bursts reduces continuous heating, limiting thermal blooming effects.
Real-Time Beam Diagnostics
Continuous monitoring of beam parameters like wavefront error, beam wander, and intensity profile enables immediate adjustments.
Example: A beam profiler coupled with AO feedback detects deviations and triggers corrective actions to maintain beam quality.
Mind Map: Best Practices for Mitigating Atmospheric Distortions
Summary Example: Combining Techniques
Consider a directed energy system deployed on a coastal cliff. The site offers reduced ground turbulence but experiences variable humidity and temperature gradients. The system employs a Shack-Hartmann wavefront sensor and a deformable mirror for AO correction. It uses spatial filtering to clean the beam and schedules operations during early morning hours to avoid strong thermal gradients. Real-time diagnostics monitor beam quality, and predictive control algorithms anticipate turbulence changes. This combination reduces atmospheric distortion effects, maintaining beam focus and stability on a distant target.
By integrating these best practices, directed energy systems can maintain beam quality despite atmospheric challenges. Each approach addresses specific distortion sources, and their combined use yields the best results.
2.5 Practical Example: Real-Time Beam Correction in Turbulent Conditions
Atmospheric turbulence distorts laser beams by causing rapid fluctuations in the refractive index of air. These fluctuations lead to beam wander, spreading, and scintillation, which degrade beam quality and targeting precision. Real-time beam correction aims to counteract these effects by sensing distortions and applying compensations quickly enough to maintain beam integrity.
Setup Overview
Imagine a directed energy system tasked with maintaining a focused beam on a distant target through a turbulent atmosphere. The system includes:
- Wavefront Sensor (WFS): Measures distortions in the incoming or outgoing beam wavefront.
- Deformable Mirror (DM): Adjusts its surface shape to correct wavefront errors.
- Control Computer: Processes sensor data and computes mirror adjustments.
- Beam Steering Mechanism: Fine-tunes beam pointing to counteract beam wander.
The goal is to maintain beam focus and direction despite atmospheric disturbances.
Step 1: Sensing the Distortion
The wavefront sensor samples the beam’s phase front, detecting deviations from an ideal flat wavefront. Commonly, a Shack-Hartmann sensor divides the beam into sub-apertures, measuring local slopes.
- Example: If a sub-aperture detects a tilt, it indicates a localized wavefront slope caused by turbulence.
Step 2: Computing Corrections
The control computer receives slope data from the WFS and reconstructs the wavefront error. It then calculates the necessary DM actuator commands to counteract the distortions.
- Example: If the wavefront has a convex distortion, the DM surface is adjusted to create a concave shape, flattening the wavefront.
Step 3: Applying Corrections
The deformable mirror actuators respond by reshaping the mirror surface. Simultaneously, the beam steering mechanism adjusts pointing to compensate for beam wander.
- Example: If the beam drifts left due to turbulence, the steering mirror tilts slightly right to realign the beam.
Step 4: Feedback Loop
This process repeats at high frequency (hundreds to thousands of times per second), forming a closed feedback loop that continuously corrects the beam.
Mind Map: Real-Time Beam Correction Workflow
Concrete Example: Laboratory Scale Real-Time Correction
A lab setup uses a 1 W laser beam transmitted over a 50-meter path through a heated air column to simulate turbulence. The system includes:
- A Shack-Hartmann WFS sampling at 1 kHz.
- A MEMS-based deformable mirror with 140 actuators.
- A fast steering mirror for beam pointing.
Process:
- The WFS detects wavefront distortions caused by the heated air.
- The control computer reconstructs the wavefront error and computes actuator commands.
- The DM adjusts its surface shape accordingly.
- The steering mirror corrects beam pointing errors.
- The corrected beam is monitored at the target plane for quality.
Outcome: The system reduces beam spot size by 40% compared to uncorrected conditions and stabilizes beam position within 10 microradians.
Mind Map: Example System Components
Key Points and Best Practices
-
Latency Matters: The correction loop must operate faster than the characteristic timescale of turbulence changes (milliseconds). Delays reduce correction effectiveness.
-
Sensor Noise: Wavefront sensors introduce measurement noise; filtering and robust algorithms help maintain stability.
-
Actuator Range and Resolution: The deformable mirror must have sufficient stroke and spatial resolution to correct expected distortions.
-
Beam Steering Complements AO: Adaptive optics correct wavefront shape, while beam steering handles beam pointing errors; both are necessary.
-
Calibration: Regular calibration of sensors and actuators ensures accurate correction.
-
Environmental Control: Minimizing local turbulence near optics improves correction performance.
This example illustrates how real-time beam correction integrates sensing, computation, and actuation to maintain beam quality in turbulent conditions. The approach scales from laboratory experiments to field-deployed directed energy systems, adapting component specifications and control strategies accordingly.
3. Fundamentals of Beam Control Systems
3.1 Components of Beam Control: Sensors, Actuators, and Controllers
Beam control systems rely on three main types of components: sensors, actuators, and controllers. Each plays a distinct role in maintaining beam stability, direction, and quality. Understanding these components and how they interact is essential for designing effective beam control solutions.
Sensors
Sensors detect the state of the beam or the environment and provide real-time data to the control system. They are the eyes of the beam control loop.
- Wavefront Sensors: Measure distortions in the beam’s wavefront. Common types include Shack-Hartmann sensors, which use an array of lenslets to sample the wavefront slope.
- Position Sensors: Detect beam position or pointing errors. Quadrant photodiodes and position-sensitive detectors (PSDs) are typical examples.
- Power Sensors: Monitor beam intensity and power fluctuations.
- Environmental Sensors: Measure temperature, vibration, or atmospheric conditions affecting the beam.
Mind Map: Sensors
Sensors
├── Wavefront Sensors
│ ├── Shack-Hartmann
│ ├── Curvature Sensors
│ └── Pyramid Sensors
├── Position Sensors
│ ├── Quadrant Photodiodes
│ └── Position-Sensitive Detectors
├── Power Sensors
└── Environmental Sensors
├── Temperature
├── Vibration
└── Atmospheric
Example: In a high-energy laser system, a Shack-Hartmann wavefront sensor detects phase distortions caused by thermal lensing. The sensor outputs data that quantifies how the beam wavefront deviates from the ideal flat wavefront.
Actuators
Actuators physically adjust the beam or optical elements to correct errors detected by sensors. They are the hands of the beam control system.
- Deformable Mirrors (DMs): Mirrors with adjustable surfaces controlled by an array of actuators to correct wavefront distortions.
- Tip-Tilt Mirrors: Small mirrors mounted on actuators that adjust beam pointing by tilting.
- Fast Steering Mirrors (FSMs): Similar to tip-tilt mirrors but optimized for higher speed and precision.
- Adaptive Lenses: Lenses whose shape or refractive index can be changed electronically or mechanically.
Mind Map: Actuators
Actuators
├── Deformable Mirrors
│ ├── Piezoelectric
│ ├── MEMS-based
│ └── Magnetic
├── Tip-Tilt Mirrors
├── Fast Steering Mirrors
└── Adaptive Lenses
Example: A fast steering mirror receives correction commands to adjust the beam pointing by a few microradians, compensating for platform vibrations that cause jitter.
Controllers
Controllers process sensor data and compute the necessary actuator commands to maintain beam stability and quality. They are the brain of the system.
- Analog Controllers: Use continuous signals and simple feedback loops, often found in basic stabilization systems.
- Digital Controllers: Use microprocessors or FPGAs to implement complex algorithms such as PID control, adaptive filtering, or model predictive control.
- Control Algorithms: Include proportional-integral-derivative (PID) loops, Kalman filters, and more advanced adaptive or predictive methods.
Mind Map: Controllers
Controllers
├── Analog Controllers
├── Digital Controllers
│ ├── Microprocessors
│ └── FPGAs
└── Control Algorithms
├── PID Control
├── Kalman Filtering
└── Adaptive Control
Example: A digital controller running a PID algorithm receives position error signals from a quadrant photodiode and sends voltage commands to a tip-tilt mirror actuator to correct beam pointing.
Integrated Example: Closed-Loop Beam Stabilization
Consider a laser system on a moving platform where beam jitter is a concern. A quadrant photodiode senses beam position shifts caused by platform motion. The sensor sends this data to a digital controller implementing a PID loop. The controller calculates the correction and drives a fast steering mirror to adjust the beam direction in real time. This loop runs at kilohertz frequencies to maintain beam pointing within microradian precision.
This example illustrates how sensors, actuators, and controllers work together to maintain beam stability. Each component must be chosen and tuned carefully to match system requirements such as bandwidth, precision, and environmental conditions.
Summary
- Sensors provide measurement data on beam state and environment.
- Actuators physically adjust beam parameters to correct errors.
- Controllers compute commands based on sensor input to drive actuators.
- Effective beam control depends on the seamless integration and tuning of these components.
Understanding the specific capabilities and limitations of each component type helps in designing robust beam control systems tailored to the needs of directed energy applications.
3.2 Feedback and Feedforward Control Loops
Control loops are the backbone of beam control systems. They ensure the beam stays on target and maintains its quality despite disturbances. Two primary types of control loops are feedback and feedforward. Each has its strengths and weaknesses, and often they work together to achieve precise beam control.
Feedback Control Loops
Feedback control loops operate by measuring the output of a system and using that information to correct any deviation from the desired state. In beam control, this typically means sensing the beam position, wavefront, or intensity and adjusting mirrors, lenses, or modulators accordingly.
The key characteristic of feedback is its reactive nature: it responds to errors after they occur. This makes feedback loops robust against unknown disturbances but introduces some delay because the system must detect the error before correcting it.
Example: Imagine a beam steering mirror that adjusts its angle based on the detected beam position on a sensor. If the beam drifts due to mechanical vibration, the sensor detects the shift, and the controller sends a command to the mirror to correct the angle. The loop continuously monitors and adjusts, keeping the beam stable.
Mind Map: Feedback Control Loop
Feedforward Control Loops
Feedforward control anticipates disturbances and applies corrections before the error manifests in the output. It uses measurements or models of the disturbance itself rather than the system output.
This approach can reduce delay and improve response speed but requires accurate knowledge of the disturbance and system behavior. Feedforward alone cannot correct unmeasured or unexpected errors.
Example: Suppose a wind gust is expected to shake the beam steering platform. A feedforward controller uses a wind speed sensor to predict the disturbance and preemptively adjusts the mirror angle to counteract the expected beam shift.
Mind Map: Feedforward Control Loop
Combining Feedback and Feedforward
In practice, beam control systems often combine both loops. Feedforward handles predictable disturbances quickly, while feedback corrects residual errors and unanticipated changes.
This hybrid approach balances speed and robustness. The feedforward loop reduces the burden on feedback, improving overall system stability and precision.
Mind Map: Combined Control Loop
Practical Example: Stabilizing a Laser Beam on a Moving Platform
Consider a directed energy system mounted on a vehicle subject to vibrations and motion. The goal is to keep the laser beam precisely aimed at a distant target.
- Feedforward: Accelerometers detect vehicle motion and vibrations. The feedforward controller calculates expected beam deviations and adjusts the steering mirrors preemptively.
- Feedback: A position-sensitive detector monitors the actual beam position. Any residual error after feedforward correction is detected and corrected by the feedback loop.
This dual-loop system ensures the beam remains stable despite unpredictable terrain and vehicle dynamics.
Practical Example: Correcting Thermal Distortions in High-Power Lasers
Thermal effects cause slow, gradual distortions in optical components. Measuring temperature gradients provides feedforward data to adjust deformable mirrors before wavefront errors grow.
Meanwhile, a wavefront sensor provides feedback by measuring the actual beam distortion. The feedback loop fine-tunes corrections to account for modeling inaccuracies and unexpected thermal gradients.
Summary
- Feedback loops react to errors after they occur, providing robustness but with some delay.
- Feedforward loops anticipate disturbances, offering faster correction but relying on accurate disturbance measurement.
- Combining both loops leverages their strengths, improving beam stability and precision.
- Real-world systems use sensors, controllers, and actuators in coordinated loops to maintain beam quality under dynamic conditions.
3.3 Stability Analysis and Control System Design
Stability is the backbone of any beam control system. Without it, the beam wanders, oscillates, or even diverges, defeating the purpose of precision targeting. Stability analysis ensures that the system responds predictably to disturbances and control inputs, maintaining the beam on target under varying conditions.
Understanding Stability in Beam Control
At its core, stability means the system’s output (beam position, wavefront shape, etc.) remains bounded and converges to the desired state after perturbations. In beam control, disturbances come from atmospheric turbulence, mechanical vibrations, thermal effects, and component imperfections.
A stable control system counters these disturbances without excessive overshoot or oscillations. Instability manifests as growing oscillations or drift, which can cause the beam to miss the target or degrade beam quality.
Key Concepts in Stability Analysis
- Open-Loop vs Closed-Loop Stability: Open-loop stability considers the system without feedback. Closed-loop stability includes the feedback controller, which is essential for correcting errors.
- Poles and Zeros: The system’s poles determine stability. Poles in the left half of the complex plane (for continuous systems) indicate stability.
- Gain and Phase Margins: These margins measure how much gain or phase variation the system can tolerate before becoming unstable.
- Time-Domain vs Frequency-Domain Analysis: Time-domain looks at response over time (step response, impulse response), while frequency-domain uses Bode plots, Nyquist plots, and root locus to assess stability.
Stability Analysis Workflow
- Model the System: Develop mathematical models of beam dynamics, actuator behavior, and sensor response.
- Linearize the Model: Around an operating point to simplify analysis.
- Analyze Poles and Zeros: Using characteristic equations.
- Evaluate Margins: Gain and phase margins using frequency response.
- Simulate Responses: Step and impulse responses to check transient behavior.
Control System Design Principles
Designing a control system for beam stability involves selecting appropriate controllers and tuning them to balance responsiveness and robustness.
-
Controller Types:
- Proportional (P): Corrects error proportionally. Simple but may leave steady-state error.
- Integral (I): Eliminates steady-state error but can slow response.
- Derivative (D): Predicts error trend, improving stability and damping.
- PID Controllers: Combine P, I, and D for balanced control.
-
Control Architecture:
- Single-Input Single-Output (SISO): Controls one variable at a time.
- Multi-Input Multi-Output (MIMO): Necessary when beam control involves multiple actuators and sensors interacting.
-
Feedback Loop Design:
- Ensure sensor noise does not destabilize the system.
- Include filters to reduce high-frequency noise.
- Design actuator limits and saturation handling.
Mind Map: Stability Analysis Components
Mind Map: Control System Design Elements
Practical Example: Designing a Closed-Loop Beam Stabilization System
Imagine a laser beam directed through a telescope with a fast steering mirror (FSM) to correct beam pointing errors caused by mechanical vibrations. The goal is to keep the beam centered on a distant target despite disturbances.
-
Modeling: The FSM dynamics are approximated as a second-order system with known natural frequency and damping ratio. The sensor measures beam position with some noise.
-
Controller Selection: A PID controller is chosen to balance quick correction (P and D terms) and eliminate steady-state error (I term).
-
Stability Analysis: Using the system transfer function, the poles are calculated. Bode plots show gain and phase margins.
-
Tuning: Controller gains are adjusted to maximize margins without excessive overshoot.
-
Simulation: Step response shows the beam position quickly returns to zero error with minimal oscillation.
-
Implementation: The controller is implemented in hardware with filters to reduce sensor noise.
-
Testing: Real disturbances are introduced, and the system maintains beam stability within required limits.
This example illustrates how stability analysis guides controller design and tuning, ensuring the beam remains steady.
Summary
Stability analysis and control system design are essential to maintain beam quality and precision in directed energy systems. By modeling the system, analyzing its dynamic behavior, and carefully designing feedback controllers, engineers can build systems that respond predictably to disturbances. Mind maps help organize the complex components involved, and practical examples ground theory in real-world application.
3.4 Integration of Beam Steering Mechanisms
Beam steering is a critical function in directed energy systems, allowing the laser beam to be directed precisely toward a target. Integrating beam steering mechanisms involves combining mechanical and optical components with control systems to achieve accurate, stable, and responsive beam positioning. This section covers the types of beam steering devices, their integration challenges, control considerations, and practical examples.
Types of Beam Steering Mechanisms
Beam steering can be achieved through several technologies, each with its own advantages and limitations:
- Gimbaled Mirrors: Mechanical platforms that rotate mirrors about one or more axes.
- Fast Steering Mirrors (FSMs): Small mirrors with rapid angular adjustment capabilities.
- Liquid Crystal Devices: Use electrically controlled refractive index changes to steer beams.
- Micro-Electro-Mechanical Systems (MEMS) Mirrors: Tiny mirrors that tilt to steer beams, often used in compact systems.
- Acousto-Optic Deflectors (AODs): Use sound waves in a crystal to diffract and steer the beam.
Each device varies in speed, angular range, resolution, and power handling.
Integration Considerations
Integrating beam steering mechanisms requires attention to mechanical, optical, and control aspects:
- Mechanical Alignment: The steering device must be precisely aligned with the optical axis to avoid beam distortion or misdirection.
- Mounting Stability: Vibrations and mechanical drift can degrade pointing accuracy; rigid, low-vibration mounts are essential.
- Thermal Effects: Heat can cause expansion or warping, affecting alignment and steering precision.
- Optical Coatings: Steering mirrors must have coatings compatible with the laser wavelength and power to avoid damage.
- Control Interface: The steering mechanism must be compatible with the control system, supporting required bandwidth and resolution.
Control System Integration
Beam steering devices are typically integrated into closed-loop control systems that use feedback from sensors such as position-sensitive detectors or wavefront sensors. Key points include:
- Bandwidth Matching: The steering device’s response speed must match the control system’s bandwidth to avoid lag or instability.
- Feedback Sensors: Accurate sensors provide real-time beam position or wavefront data to correct pointing errors.
- Calibration: Regular calibration ensures the steering commands correspond accurately to angular changes.
- Compensation Algorithms: Control algorithms may include feedforward and adaptive elements to handle dynamic disturbances.
Mind Map: Key Elements of Beam Steering Integration
Practical Example: Integrating a Fast Steering Mirror in a Directed Energy System
Consider a system requiring rapid beam adjustments to compensate for atmospheric turbulence. A fast steering mirror (FSM) is selected for its high bandwidth and fine angular resolution.
- Mechanical Setup: The FSM is mounted on a vibration-isolated platform aligned with the beam path. The mirror surface is coated for high reflectivity at the laser wavelength.
- Control Loop: A position-sensitive detector measures the beam position downstream. The FSM controller receives error signals and adjusts the mirror angle accordingly.
- Calibration: The system is calibrated by applying known angular inputs to the FSM and measuring resulting beam displacement, establishing a transfer function.
- Performance: The closed-loop system reduces beam wander by correcting angular deviations up to several hundred Hz.
Mind Map: FSM Integration Workflow
Practical Example: Combining Gimbaled Mirrors and Adaptive Optics
In some systems, coarse beam steering is handled by gimbaled mirrors, while fine corrections are made by adaptive optics elements like deformable mirrors.
- Coarse Steering: Gimbaled mirrors provide large angular range but slower response.
- Fine Steering: Adaptive optics correct high-frequency wavefront distortions and small pointing errors.
- Integration: Control systems coordinate commands between the two devices to maintain beam alignment and quality.
- Challenges: Synchronizing control loops and managing mechanical resonances are important for stable operation.
Summary
Integrating beam steering mechanisms requires balancing mechanical precision, optical quality, and control system responsiveness. Understanding device characteristics and system requirements guides effective integration. Practical examples demonstrate how to implement steering devices to maintain beam stability and targeting accuracy in directed energy applications.
3.5 Practical Example: Implementing a Closed-Loop Beam Stabilization System
Closed-loop beam stabilization is a fundamental technique to maintain beam alignment and quality in directed energy systems. It relies on continuous measurement of the beam position or wavefront, followed by corrective action to minimize deviations caused by vibrations, atmospheric disturbances, or mechanical drift.
System Components and Workflow
A typical closed-loop beam stabilization system consists of three main components:
- Sensor: Detects beam position or wavefront errors.
- Controller: Processes sensor data and computes correction signals.
- Actuator: Adjusts beam direction or wavefront based on controller commands.
The workflow follows a feedback loop:
- Sensor measures beam position or wavefront.
- Controller compares measurement to desired reference.
- Controller calculates correction commands.
- Actuator applies corrections.
- Sensor measures the updated beam state.
This loop repeats continuously to maintain beam stability.
Mind Map: Closed-Loop Beam Stabilization System
Step-by-Step Implementation
Step 1: Select the Sensor
For beam position stabilization, a quadrant photodiode (QPD) is a common choice. It provides analog signals proportional to beam displacement in two axes. For wavefront stabilization, a Shack-Hartmann wavefront sensor may be used.
Example: Using a QPD placed at a focal plane to detect beam centroid shifts.
Step 2: Design the Controller
A proportional-integral-derivative (PID) controller is often sufficient for basic stabilization. The PID parameters (gain, integral time, derivative time) must be tuned to balance responsiveness and stability.
Example: Implementing a PID controller on a microcontroller that reads QPD signals and outputs correction voltages.
Step 3: Choose the Actuator
Fast steering mirrors (FSMs) are widely used to correct beam pointing errors. They can respond quickly to control signals and provide angular adjustments.
Example: A piezo-driven FSM capable of ±1 mrad angular correction with a bandwidth of several hundred Hz.
Step 4: Integrate and Calibrate
Mount the sensor and actuator in the optical path. Calibrate the sensor output to actual beam displacement and the actuator input to angular correction. Establish the reference position for the beam.
Example: Using a calibrated translation stage to move the beam and record sensor response.
Step 5: Implement the Feedback Loop
Program the controller to continuously read sensor data, compute the error relative to the reference, and send correction commands to the actuator.
Example: Running a control loop at 1 kHz to ensure timely corrections.
Mind Map: Feedback Loop Operation
Example Scenario: Stabilizing a Laser Beam on a Target
Suppose a laser beam must remain fixed on a small target 500 meters away. Environmental vibrations and platform motion cause beam jitter.
- The QPD detects beam displacement by measuring the centroid shift of a low-power sampling beam.
- The PID controller calculates the necessary angular correction.
- The FSM adjusts the beam direction to compensate.
Over time, the closed-loop system reduces beam jitter from several milliradians to a few microradians, improving targeting precision.
Practical Tips
- Sensor Noise: Minimize electronic noise in sensor signals to avoid false corrections.
- Controller Tuning: Start with low gains and gradually increase to avoid oscillations.
- Actuator Bandwidth: Ensure actuator response is faster than disturbance frequencies.
- Loop Latency: Keep processing delays low to maintain loop stability.
Summary
Implementing a closed-loop beam stabilization system involves selecting appropriate sensors and actuators, designing a control algorithm, and integrating these components into a feedback loop. Calibration and tuning are essential to achieve effective stabilization. This approach is a cornerstone for maintaining beam quality and precision in directed energy applications.
4. Adaptive Optics: Principles and Components
4.1 Wavefront Sensing Techniques
Wavefront sensing is a cornerstone of adaptive optics, providing the data needed to correct distortions in a laser beam’s phase front. The goal is to measure deviations from an ideal wavefront so that corrective elements, like deformable mirrors, can compensate and restore beam quality. Different techniques exist, each with strengths and trade-offs depending on system requirements such as speed, sensitivity, and complexity.
Common Wavefront Sensing Methods
- Shack-Hartmann Wavefront Sensor (SHWFS)
- Shearing Interferometer
- Curvature Sensor
- Pyramid Wavefront Sensor
- Phase Retrieval Techniques
Shack-Hartmann Wavefront Sensor (SHWFS)
The SHWFS is the most widely used wavefront sensor in directed energy systems. It consists of a lenslet array that divides the incoming beam into multiple sub-apertures. Each lenslet focuses light onto a detector, typically a CCD or CMOS sensor. The position of each focal spot shifts according to the local wavefront slope.
How it works:
- The ideal wavefront produces a regular grid of spots.
- Distortions cause spot displacements.
- By measuring these displacements, local wavefront slopes are calculated.
- Integration of slopes reconstructs the full wavefront.
Advantages:
- Direct measurement of local slopes.
- High spatial resolution limited by lenslet density.
- Fast readout suitable for real-time correction.
Limitations:
- Sensitivity drops for low light levels.
- Dynamic range limited by spot displacement before overlap.
Example: A high-power laser system uses an SHWFS to monitor beam distortions caused by thermal gradients in the optics. The sensor detects spot shifts in milliseconds, enabling the control system to adjust the deformable mirror and maintain beam focus on a distant target.
Shearing Interferometer
This sensor measures wavefront gradients by interfering two slightly shifted copies of the wavefront. The resulting interference pattern encodes the wavefront slope information.
How it works:
- The beam passes through a shearing element (e.g., a wedge or a diffraction grating).
- Two overlapping wavefronts interfere, producing fringes.
- Fringe shifts correspond to wavefront slope differences.
Advantages:
- Simple optical setup.
- No need for a lenslet array.
Limitations:
- Lower spatial resolution compared to SHWFS.
- Fringe analysis can be computationally intensive.
Example: In a laboratory setting, a shearing interferometer is used to quickly verify wavefront quality of a laser beam after passing through a test optic. The fringe pattern visually indicates aberrations, allowing for immediate adjustments.
Curvature Sensor
Instead of measuring slopes, curvature sensors detect the second derivative of the wavefront by comparing intensity patterns at planes slightly before and after the focal plane.
How it works:
- Two images are captured at defocused planes.
- Intensity differences relate to wavefront curvature.
- Reconstruction algorithms convert these into wavefront shape.
Advantages:
- Can be more sensitive to certain aberrations.
- Simpler hardware compared to SHWFS.
Limitations:
- Requires precise control of defocus distances.
- Reconstruction is mathematically more complex.
Example: A curvature sensor is employed in a compact adaptive optics system where space constraints limit the use of bulky lenslet arrays. The sensor provides sufficient wavefront data for moderate correction needs.
Pyramid Wavefront Sensor
This sensor uses a pyramidal prism placed at the focal plane to split the beam into four parts, which are then imaged onto a detector. Differences in intensity across these images correspond to wavefront slopes.
How it works:
- The pyramid splits the focal spot into four quadrants.
- Intensity differences between quadrants indicate local wavefront tilt.
- Data is processed to reconstruct the wavefront.
Advantages:
- Higher sensitivity than SHWFS, especially for small aberrations.
- Can operate with fewer photons.
Limitations:
- More complex alignment and calibration.
- Less common in directed energy applications.
Example: In a research prototype, a pyramid sensor is tested to improve correction precision on a low-power beam with subtle distortions, demonstrating improved sensitivity over traditional SHWFS.
Phase Retrieval Techniques
These methods infer the wavefront by analyzing intensity measurements at different planes or under varying conditions, without direct slope measurement.
How it works:
- Capture multiple intensity images (e.g., in focus and defocused).
- Use iterative algorithms to estimate the phase that best fits the data.
Advantages:
- No specialized wavefront sensor hardware needed.
- Useful when direct wavefront measurement is impractical.
Limitations:
- Computationally intensive.
- Slower than direct sensing methods.
Example: Phase retrieval is applied in a system where adding a wavefront sensor is not feasible. By capturing images at different focus positions, the wavefront is reconstructed offline to analyze system aberrations.
Mind Map: Wavefront Sensing Techniques
Mind Map: Practical Considerations
Wavefront sensing is not a one-size-fits-all problem. The choice depends on the specific directed energy system’s constraints and goals. Shack-Hartmann sensors dominate due to their balance of speed and resolution, but alternatives like curvature or pyramid sensors find niches where their unique advantages shine. Understanding these techniques and their practical trade-offs is essential for designing effective adaptive optics systems.
4.2 Deformable Mirrors and Spatial Light Modulators
In adaptive optics, deformable mirrors (DMs) and spatial light modulators (SLMs) are the primary tools for correcting wavefront distortions. Both devices manipulate the phase of an incoming beam, but they do so in different ways and suit different applications. Understanding their operation, advantages, and limitations is crucial for effective beam control.
Deformable Mirrors (DMs)
Deformable mirrors are reflective surfaces with adjustable shapes. They consist of a thin mirror surface attached to an array of actuators. By pushing or pulling on the mirror at discrete points, the surface shape changes, correcting wavefront errors.
-
Types of Actuators: Common actuator technologies include piezoelectric, microelectromechanical systems (MEMS), and electromagnetic actuators. Piezoelectric actuators offer high precision but can be bulky. MEMS are compact and fast but typically have smaller stroke ranges.
-
Mirror Surface: The mirror is usually made from glass or silicon coated with a reflective material. Its thickness and flexibility affect the mirror’s ability to correct different spatial frequencies of wavefront distortion.
-
Stroke and Resolution: Stroke refers to the maximum displacement an actuator can produce. Resolution depends on the number and spacing of actuators. More actuators allow finer correction but increase system complexity.
-
Response Time: DMs generally have fast response times, suitable for real-time correction of atmospheric turbulence or mechanical vibrations.
-
Example: A 140-actuator piezoelectric DM can correct low- to mid-spatial frequency aberrations in a high-power laser system, improving beam focus on a distant target.
Mind Map: Deformable Mirrors
Spatial Light Modulators (SLMs)
Spatial light modulators are devices that modulate the phase or amplitude of light beams electronically without moving parts. They are often based on liquid crystal technology or micro-mirror arrays.
-
Types: The two main types are liquid crystal SLMs and digital micromirror devices (DMDs). Liquid crystal SLMs modulate phase by changing the refractive index, while DMDs modulate amplitude by tilting tiny mirrors.
-
Phase Modulation: Liquid crystal SLMs can provide continuous phase modulation across the aperture, which is useful for fine wavefront shaping.
-
Refresh Rate: SLMs generally have slower refresh rates compared to DMs, which can limit their use in fast-changing environments.
-
Pixelation: SLMs are pixelated devices, meaning the wavefront correction is discrete rather than continuous. This can introduce diffraction effects if pixel size is not sufficiently small.
-
Example: A liquid crystal SLM with 1920x1080 pixels can be used in a laboratory setup to correct static aberrations in a laser beam path.
Mind Map: Spatial Light Modulators
Comparing DMs and SLMs
| Feature | Deformable Mirrors | Spatial Light Modulators |
|---|---|---|
| Modulation Type | Continuous phase via surface shape | Phase or amplitude via pixels |
| Response Time | Fast (microseconds to milliseconds) | Slower (milliseconds to tens of milliseconds) |
| Stroke | Limited by actuator range | Limited by phase shift range of liquid crystals |
| Spatial Resolution | Limited by actuator count | High pixel count, but pixelated |
| Mechanical Parts | Yes, moving mirror surface | No moving mirror surface (except DMDs) |
| Typical Use Cases | Real-time atmospheric correction, vibration compensation | Static or slow-changing aberrations, beam shaping |
Practical Example: Choosing Between a DM and an SLM
Imagine a directed energy system operating outdoors where atmospheric turbulence changes rapidly. A deformable mirror with fast response and moderate actuator count is preferred to correct wavefront distortions in real time. Conversely, in a laboratory setting where the beam path has static or slowly varying aberrations, a high-resolution liquid crystal SLM can be used to finely shape the beam phase profile.
Summary
Deformable mirrors and spatial light modulators serve complementary roles in adaptive optics. DMs excel in speed and continuous correction but can be limited in spatial resolution and stroke. SLMs offer high spatial resolution and flexible modulation but at slower speeds and with pixelation effects. Selecting the right device depends on the specific requirements of the directed energy application, including speed, correction complexity, and environmental conditions.
4.3 Control Algorithms for Adaptive Optics
Adaptive optics (AO) systems rely heavily on control algorithms to correct wavefront distortions in real time. These algorithms translate sensor data into commands for deformable mirrors or other wavefront correctors. The goal is to minimize residual aberrations and maintain beam quality. Understanding the main control strategies and their practical applications is essential for effective AO design.
Basic Concepts
At the heart of AO control is a feedback loop: wavefront sensors measure distortions, the controller computes corrections, and actuators apply these corrections. The challenge lies in handling noise, delays, and the dynamic nature of atmospheric turbulence or thermal fluctuations.
Mind Map: Control Algorithms Overview
Modal vs. Zonal Control
Modal control breaks the wavefront into a set of orthogonal basis functions, such as Zernike polynomials. Each mode corresponds to a particular aberration pattern (e.g., defocus, astigmatism). The controller adjusts the amplitude of these modes to correct the wavefront. This approach reduces dimensionality and can simplify control but may struggle with localized distortions.
Zonal control treats the wavefront as a grid of discrete points, controlling actuators directly based on local wavefront errors. This method can handle complex, localized aberrations but requires more computational power and careful handling of actuator influence functions.
Example: In a telescope AO system, modal control might correct low-order aberrations caused by atmospheric turbulence, while zonal control could address higher-order, localized distortions.
Control Strategies
PID Control: The simplest approach, combining proportional, integral, and derivative terms to adjust actuator commands based on error signals. PID controllers are easy to implement but may not handle complex dynamics or noise optimally.
Example: A PID controller can stabilize a deformable mirror’s shape against slow thermal drifts, ensuring steady correction without overshoot.
Linear Quadratic Gaussian (LQG) Control: This method uses a state-space model of the system and noise characteristics to compute an optimal control law minimizing a cost function. LQG can handle noisy measurements and system dynamics more effectively than PID.
Example: An LQG controller can predict atmospheric turbulence evolution, improving correction accuracy in a high-speed AO system.
Model Predictive Control (MPC): MPC uses a model of system dynamics to optimize control actions over a future time horizon, updating commands as new measurements arrive. It can handle constraints and multivariable systems but requires significant computational resources.
Example: MPC might be used in a high-power laser AO system where actuator limits and thermal effects impose strict constraints on corrections.
Real-Time Considerations
AO control algorithms must operate within tight time budgets, often milliseconds or less. Latency in sensing, computation, and actuation can degrade performance.
Noise filtering is critical, as wavefront sensor measurements contain photon noise, detector noise, and background disturbances. Controllers often incorporate Kalman filters or similar techniques to estimate the true wavefront state.
Stability analysis ensures that the control loop does not oscillate or diverge. This involves tuning controller parameters and sometimes adding damping or predictive elements.
Mind Map: Real-Time Control Loop
Practical Example: Implementing a PID Controller for AO
Imagine a small-scale AO system correcting low-order aberrations in a lab laser. The wavefront sensor outputs a defocus error signal. A PID controller computes the correction voltage for the deformable mirror actuator.
- Proportional term: Applies correction proportional to current error.
- Integral term: Addresses steady-state error by integrating past errors.
- Derivative term: Predicts future error trends to reduce overshoot.
Tuning involves adjusting gains to balance responsiveness and stability. Too high proportional gain causes oscillations; too low leads to sluggish correction.
This simple approach works well for slow-changing aberrations but struggles with fast turbulence.
Practical Example: LQG Control in Atmospheric Turbulence
In a telescope AO system, atmospheric turbulence evolves rapidly and unpredictably. An LQG controller models turbulence as a stochastic process and uses Kalman filtering to estimate wavefront states from noisy sensor data.
The controller then computes actuator commands minimizing the expected residual error. This approach improves correction accuracy and reduces noise amplification compared to PID.
Implementing LQG requires system identification to build accurate models and sufficient computational power for real-time operation.
In summary, selecting and implementing control algorithms for adaptive optics depends on system complexity, disturbance characteristics, and real-time constraints. Modal and zonal control offer different trade-offs in representation and computation. PID, LQG, and MPC provide a range of control sophistication, balancing ease of implementation and performance. Practical examples highlight how these algorithms translate into real-world AO corrections.
4.4 Calibration and Alignment Procedures
Calibration and alignment are foundational steps in ensuring adaptive optics (AO) systems perform as intended. Without precise calibration, wavefront sensors and deformable mirrors can introduce errors rather than correct them. Alignment ensures that the optical path is optimized, minimizing aberrations and maximizing correction efficiency.
Calibration Procedures
Calibration focuses on establishing a baseline for the AO system components, primarily the wavefront sensor (WFS) and the deformable mirror (DM). The goal is to map sensor readings to actual wavefront distortions and to understand how actuator commands on the DM translate to wavefront changes.
-
Wavefront Sensor Calibration:
- Establish a reference wavefront, usually a flat or known shape.
- Measure sensor response to this reference.
- Determine sensor sensitivity and linearity.
- Correct for sensor noise and bias.
-
Deformable Mirror Calibration:
- Apply known voltages to actuators.
- Measure resulting wavefront changes using the WFS.
- Create an influence matrix linking actuator commands to wavefront deformation.
- Verify actuator linearity and cross-talk.
Mind Map: Calibration Workflow
Example: In a laboratory AO setup, a flat mirror is placed in the beam path to provide a reference wavefront. The WFS readings are recorded and analyzed to identify any sensor bias. Next, each DM actuator is energized sequentially with a small voltage step, and the resulting wavefront deformation is captured by the WFS. This data forms the influence matrix, which is essential for the control algorithm to compute actuator commands that correct measured aberrations.
Alignment Procedures
Alignment ensures that all optical components are positioned and oriented correctly along the beam path. Misalignment can cause beam clipping, introduce aberrations, or reduce correction effectiveness.
Key steps include:
- Initial Mechanical Alignment: Use mechanical mounts and alignment tools (e.g., alignment lasers, irises) to position components roughly along the optical axis.
- Fine Optical Alignment: Adjust tip, tilt, and position of optics to maximize beam quality and sensor signal.
- Wavefront Sensor Alignment: Ensure the beam is centered and properly focused on the sensor’s active area.
- Deformable Mirror Alignment: Position the DM so the beam fully covers the actuator array without vignetting.
Mind Map: Alignment Steps
Example: During system setup, an alignment laser is introduced along the intended optical path. Irises placed at strategic points verify that the beam is centered. The wavefront sensor is adjusted in position and focus until the beam spot is centered on the sensor’s detector array. The deformable mirror is then positioned so the beam fully illuminates the actuator surface, ensuring maximum correction capability.
Combined Calibration and Alignment Considerations
Calibration and alignment are iterative. Misalignment can skew calibration data, and poor calibration can mask alignment issues. A common approach is:
- Perform coarse alignment.
- Calibrate sensors and mirrors.
- Refine alignment based on calibration results.
- Repeat calibration if alignment changes.
Mind Map: Iterative Process
Example: After initial alignment and calibration, the AO system shows unexpected residual aberrations. Upon inspection, slight misalignment of the DM was found. Adjusting the DM position improved wavefront correction, necessitating recalibration of the influence matrix. This cycle repeated until residual errors were minimized.
Practical Tips
- Use stable mechanical mounts to reduce drift.
- Document calibration settings and alignment positions.
- Perform calibration in controlled environmental conditions to reduce variability.
- Regularly check alignment during operation, especially after system transport or maintenance.
Calibration and alignment are not one-time tasks but ongoing processes that maintain AO system performance. Clear procedures and careful execution reduce downtime and improve beam control reliability.
4.5 Practical Example: Adaptive Optics Correction in a High-Power Laser System
Adaptive optics (AO) systems are essential in high-power laser setups to maintain beam quality by correcting wavefront distortions caused by thermal effects, mechanical vibrations, or atmospheric turbulence. This example walks through the process of implementing AO correction in a high-power laser system, highlighting key steps, components, and decision points.
System Overview
The system consists of a high-power laser source, a deformable mirror (DM) for wavefront correction, a Shack-Hartmann wavefront sensor (WFS), and a control unit that processes sensor data and drives the DM.
Step 1: Wavefront Sensing
The Shack-Hartmann sensor divides the incoming beam into an array of sub-apertures using a lenslet array. Each sub-aperture focuses light onto a detector, producing spots whose positions shift in response to local wavefront slopes.
- Goal: Measure the distorted wavefront in real time.
- Best Practice: Ensure the sensor’s dynamic range and spatial resolution match the expected distortion scale.
Mind Map (Wavefront Sensing):
Wavefront Sensing
├── Shack-Hartmann Sensor
│ ├── Lenslet Array
│ ├── Detector Array
│ └── Spot Position Measurement
├── Wavefront Slope Calculation
└── Calibration
├── Reference Wavefront
└── Sensor Alignment
Step 2: Wavefront Reconstruction
The sensor outputs local slopes, which the control system reconstructs into a full wavefront map using algorithms like least squares or modal reconstruction.
- Best Practice: Use modal reconstruction with Zernike polynomials for smooth aberrations common in thermal distortions.
Mind Map (Wavefront Reconstruction):
Wavefront Reconstruction
├── Input: Local Slopes
├── Algorithms
│ ├── Least Squares
│ └── Modal (Zernike Polynomials)
├── Output: Wavefront Map
└── Error Estimation
Step 3: Control Signal Generation
The reconstructed wavefront error is converted into actuator commands for the deformable mirror. Control algorithms like proportional-integral-derivative (PID) or model predictive control can be used.
- Best Practice: Start with a PID controller tuned for the system’s response time and actuator dynamics.
Mind Map (Control Signal Generation):
Control Signal Generation
├── Input: Wavefront Error
├── Control Algorithms
│ ├── PID
│ └── Model Predictive Control
├── Actuator Command Calculation
└── Feedback Loop
Step 4: Deformable Mirror Actuation
The DM adjusts its surface shape to counteract the measured wavefront distortions. Common DM types include piezoelectric and MEMS-based mirrors.
- Best Practice: Verify actuator linearity and hysteresis characteristics to ensure predictable correction.
Mind Map (Deformable Mirror):
Deformable Mirror
├── Types
│ ├── Piezoelectric
│ └── MEMS
├── Actuators
│ ├── Number
│ └── Stroke Range
├── Surface Shape Control
└── Calibration
Step 5: System Calibration and Alignment
Before closed-loop operation, calibrate the system by measuring the response matrix that links actuator inputs to sensor outputs. Align the optical components to minimize static aberrations.
- Best Practice: Use a reference flat wavefront to establish baseline sensor readings.
Step 6: Closed-Loop Operation
Run the AO system in closed-loop mode, continuously measuring the wavefront, reconstructing it, and applying corrections. Monitor performance metrics like residual wavefront error and beam quality (M² factor).
- Best Practice: Implement safety interlocks to prevent DM saturation or damage under unexpected conditions.
Concrete Example
Consider a 10 kW continuous-wave fiber laser used for materials processing. Thermal lensing in the output optics causes wavefront distortions that degrade focus quality.
- The Shack-Hartmann sensor with 64x64 lenslets measures the distorted wavefront at 1 kHz.
- Wavefront reconstruction uses Zernike polynomials up to the 15th order.
- A PID controller drives a 97-actuator piezoelectric deformable mirror.
- Calibration involves applying known voltages to each actuator and recording sensor responses.
- Closed-loop correction reduces root mean square (RMS) wavefront error from 1.2 wavelengths to 0.1 wavelengths, improving beam focus and cutting precision.
Summary
Adaptive optics correction in high-power laser systems follows a structured process: sensing wavefront distortions, reconstructing the wavefront, generating control signals, and actuating a deformable mirror. Each step requires careful component selection, calibration, and tuning to achieve stable, precise correction. This example demonstrates how integrating these elements improves beam quality and system performance in a practical setting.
5. Thermal Management in Directed Energy Systems
5.1 Sources of Thermal Distortion in Optical Components
Thermal distortion in optical components arises when heat alters the physical or optical properties of materials within a directed energy system. These distortions degrade beam quality and reduce system performance. Understanding the sources of thermal distortion helps in designing effective thermal management strategies.
Primary Sources of Thermal Distortion
-
Absorption of Laser Energy: Even highly transparent optical materials absorb a fraction of the incident laser power. This absorbed energy converts to heat, causing localized temperature rises.
-
Non-uniform Heating: Variations in beam intensity or material properties lead to uneven temperature distributions, resulting in spatially varying expansion or refractive index changes.
-
Environmental Heat Loads: External factors such as ambient temperature fluctuations, nearby heat sources, or airflow can introduce thermal gradients.
-
Mechanical Contact and Mounting: Heat conduction through mounts or mechanical interfaces can create hotspots or uneven cooling.
-
Electrical Components: Sensors, actuators, or electronics integrated near optics may generate heat that affects optical elements.
Types of Thermal Distortions
-
Thermal Expansion: Materials expand when heated, changing the shape or thickness of lenses, mirrors, or windows.
-
Thermo-Optic Effect: Temperature changes alter the refractive index of optical materials, shifting wavefronts.
-
Stress-Induced Birefringence: Uneven heating causes mechanical stress, which can induce birefringence and polarization distortions.
-
Surface Figure Changes: Thermal gradients can deform mirror surfaces, affecting beam focus and pointing.
Mind Map: Sources and Effects of Thermal Distortion
Example 1: Thermal Distortion in a High-Power Laser Lens
Consider a plano-convex lens used to focus a high-power laser beam. The lens material absorbs 0.1% of the incident power. For a 1 kW beam, this translates to 1 W of heat generated inside the lens. If the beam profile is Gaussian, the center of the lens heats more than the edges, causing the lens center to expand and the refractive index to change locally. This results in a thermal lensing effect, where the lens behaves like an additional lens with variable focal length, distorting the beam.
Example 2: Mirror Surface Deformation Due to Mounting Heat
A mirror mounted on a metal holder conducts heat from nearby electronics. The mounting point becomes warmer than the rest of the mirror substrate, causing uneven expansion. This creates a slight bend or warp in the mirror surface, shifting the reflected beam’s direction and degrading pointing stability.
Mind Map: Thermal Distortion Example Breakdown
Summary
Thermal distortion stems from heat generation and uneven temperature distributions within optical components. Absorption of laser energy, environmental factors, and mechanical interfaces all contribute. The resulting expansion, refractive index changes, and stress alter the optical path and surface figure. Recognizing these sources is the first step toward minimizing their impact on beam control and adaptive optics systems.
5.2 Thermal Effects on Beam Quality and Stability
Thermal effects have a significant impact on beam quality and stability in directed energy systems. When optical components heat up, their physical properties change, which can distort the beam and reduce system performance. Understanding these effects is essential for effective thermal management.
Thermal Effects on Beam Quality
-
Thermal Lensing: When a laser beam passes through an optical element that absorbs some of the beam’s energy, the element heats unevenly. This creates a refractive index gradient, effectively turning the optic into a lens with variable focal length. Thermal lensing can cause the beam to focus or defocus unpredictably, degrading beam quality.
-
Thermal Expansion and Deformation: Heating causes materials to expand. Optical surfaces may warp or shift, changing the alignment and shape of the beam path. Even microscopic surface deformations can scatter light and reduce beam coherence.
-
Stress-Induced Birefringence: Temperature gradients generate mechanical stress within optical materials. This stress can alter the polarization state of the beam, which is critical in systems relying on polarization-sensitive components.
-
Wavefront Distortion: Thermal gradients cause spatial variations in refractive index and surface shape, leading to wavefront errors. These distortions reduce the beam’s focusability and increase divergence.
Thermal Effects on Beam Stability
-
Pointing Instability: Thermal expansion of mounts and structures can cause slow drift or jitter in beam pointing. This instability complicates precision targeting.
-
Temporal Fluctuations: As components heat and cool, beam parameters such as intensity profile and phase fluctuate over time, affecting repeatability.
-
Alignment Drift: Thermal cycling can loosen mechanical connections or change alignment settings, requiring frequent recalibration.
Mind Map: Thermal Effects on Beam Quality and Stability
Example 1: Thermal Lensing in a High-Power Laser
A high-power laser system used for material processing experienced a gradual defocusing of the beam during extended operation. Investigation revealed that the laser’s output window absorbed a small fraction of the beam energy, heating unevenly. This created a thermal lens that shifted the beam waist position. By installing a water-cooled mount and selecting a window material with lower absorption, the thermal lensing effect was reduced, stabilizing the beam focus.
Example 2: Pointing Instability Due to Thermal Expansion
In a directed energy testbed, operators noticed that the beam pointing drifted over hours of operation. The optical bench was aluminum, which expanded with temperature changes in the lab. This expansion caused slight shifts in mirror mounts, moving the beam path. Switching to a low-expansion material for the bench and adding temperature control reduced the pointing drift significantly.
Mind Map: Managing Thermal Effects
Thermal effects are unavoidable but manageable. Recognizing how heat alters optical properties and mechanical stability helps in designing systems that maintain beam quality and pointing accuracy. Practical steps include choosing appropriate materials, implementing cooling, and using adaptive optics to correct residual distortions.
5.3 Cooling Techniques: Passive and Active Methods
Cooling Techniques: Passive and Active Methods
Managing heat in directed energy systems is critical because thermal distortions can degrade beam quality and system stability. Cooling methods fall into two broad categories: passive and active. Both have their place depending on system size, power levels, and operational environments.
Passive Cooling Techniques
Passive cooling relies on natural heat dissipation without mechanical assistance. It’s often simpler, more reliable, and requires no power input.
- Conduction: Heat is transferred through solid materials from hot components to cooler parts or heat sinks.
- Convection: Natural airflow carries heat away from surfaces.
- Radiation: Surfaces emit infrared energy to dissipate heat.
Mind Map: Passive Cooling Techniques
Example: A laser diode module mounted on an aluminum heat sink uses conduction to transfer heat from the diode to the sink. The heat sink’s fins increase surface area, improving natural convection. The outer surface may be anodized to enhance emissivity, boosting radiative cooling.
Best Practice: Use materials with high thermal conductivity (like copper or aluminum) for heat sinks and ensure good thermal contact using thermal interface materials such as thermal grease or pads. Design enclosures to allow airflow without letting dust or contaminants enter.
Active Cooling Techniques
Active cooling involves mechanical or fluid systems to remove heat more aggressively and maintain tighter temperature control.
- Forced Air Cooling: Fans or blowers move air over components or heat exchangers.
- Liquid Cooling: Coolants circulate through channels or jackets to absorb and carry away heat.
- Thermoelectric Cooling: Peltier devices create a temperature difference using electrical current.
Mind Map: Active Cooling Techniques
Example: In a high-power fiber laser, liquid cooling channels are integrated around the gain medium. Water mixed with glycol circulates through the channels, pumped by a variable-speed pump. The coolant absorbs heat and passes through an external radiator with fans to reject heat to the environment.
Best Practice: Select coolant compatible with system materials to avoid corrosion. Monitor flow rates and temperatures to prevent hotspots. Incorporate redundancy in pumps or fans for critical systems.
Comparing Passive and Active Cooling
| Aspect | Passive Cooling | Active Cooling |
|---|---|---|
| Complexity | Low | Higher |
| Power Consumption | None | Requires power |
| Maintenance | Minimal | Regular (fans, pumps) |
| Cooling Capacity | Limited | High |
| Noise | Silent | Can be noisy |
Hybrid Approaches
Many systems combine passive and active cooling. For example, a heat sink with fins (passive) may be paired with a fan (active) to increase airflow when temperatures rise.
Mind Map: Hybrid Cooling
Example: A directed energy turret uses passive heat sinks on optical mounts and active liquid cooling for the laser gain medium. Temperature sensors trigger increased fan speeds or coolant flow when thresholds are exceeded.
Summary
Effective thermal management balances simplicity, reliability, and cooling capacity. Passive cooling suits low to moderate power systems or as a baseline. Active cooling is necessary for high-power or precision systems where temperature stability directly affects beam quality. Combining both methods often yields the best results, adapting to operational demands while managing complexity.
5.4 Thermal Modeling and Simulation Approaches
Thermal modeling and simulation are essential tools for understanding how heat affects directed energy systems, especially high-power lasers where temperature gradients can distort optics and degrade beam quality. The goal is to predict temperature distributions, thermal stresses, and resulting optical aberrations before physical implementation, saving time and resources.
Key Concepts in Thermal Modeling
Thermal modeling involves solving heat transfer equations that describe conduction, convection, and radiation within the system. The primary equation is the heat conduction equation:
\[ \rho c_p \frac{\partial T}{\partial t} = \nabla \cdot (k \nabla T) + Q \]
where:
- \(\rho\) is material density,
- \(c_p\) is specific heat capacity,
- \(T\) is temperature,
- \(k\) is thermal conductivity,
- \(Q\) is heat generation per unit volume.
This partial differential equation can be steady-state or transient depending on the problem.
Common Thermal Modeling Approaches
- Analytical Models: Useful for simple geometries and boundary conditions. They provide quick insights but lack flexibility.
- Finite Element Analysis (FEA): Numerical method that divides the system into small elements to solve heat transfer equations. It handles complex geometries and material properties.
- Computational Fluid Dynamics (CFD): Used when convection and fluid flow significantly affect thermal behavior, such as in cooling systems.
Mind Map: Thermal Modeling Approaches
Steps in Thermal Simulation
- Define Geometry: Model the physical components, including optics, mounts, and cooling elements.
- Assign Material Properties: Thermal conductivity, specific heat, density, emissivity.
- Specify Boundary Conditions: Ambient temperature, heat sources (laser absorption, electronics), convection coefficients.
- Mesh Generation: Divide geometry into finite elements or volumes.
- Solve Governing Equations: Using numerical solvers for temperature distribution.
- Post-Processing: Analyze temperature gradients, thermal stresses, and deformation.
Practical Example: Modeling Thermal Effects in a Laser Mirror
Consider a high-reflectivity mirror exposed to a 100 W laser beam. The mirror absorbs 1% of the power, generating 1 W of heat concentrated near the surface.
- Geometry: Circular mirror, 50 mm diameter, 10 mm thick.
- Material: Fused silica, with known thermal properties.
- Boundary Conditions: Convective cooling on the back surface, ambient temperature at 25°C.
Using FEA software, the temperature distribution shows a peak near the center, with a gradient decreasing radially. This gradient causes thermal expansion and surface deformation, which can be translated into wavefront distortion.
Mind Map: Thermal Simulation Workflow
Best Practices for Thermal Modeling
- Validate Models: Compare simulation results with experimental data or simpler analytical models.
- Refine Mesh Near Heat Sources: Improves accuracy where temperature gradients are steep.
- Include All Heat Sources: Don’t overlook minor contributors like electronics or ambient radiation.
- Use Transient Analysis When Needed: Some thermal effects evolve over time and steady-state assumptions can miss critical behaviors.
- Couple Thermal and Structural Simulations: To predict deformation and resulting optical aberrations.
Example: Coupled Thermal-Optical Simulation
After obtaining temperature-induced deformation from thermal simulation, feed this data into an optical model to calculate wavefront errors. This approach helps quantify beam quality degradation and guides design modifications, such as improved cooling or material selection.
Mind Map: Integrated Thermal-Optical Modeling
In summary, thermal modeling and simulation provide a quantitative foundation for managing heat in directed energy systems. By combining thermal, structural, and optical analyses, engineers can anticipate performance issues and design effective thermal management strategies.
5.5 Practical Example: Designing a Thermal Control System for a High-Power Laser
When working with high-power lasers, thermal management is not just a convenience—it’s a necessity. Excess heat can distort optical components, reduce beam quality, and even damage the system. This example walks through designing a thermal control system tailored for a 10 kW continuous-wave fiber laser used in industrial cutting.
Step 1: Identify Heat Sources and Thermal Loads
The first step is to pinpoint where heat is generated and how much. In our laser, the main contributors are:
- Laser diode pump modules: Convert electrical energy to optical energy with some inefficiency, generating heat.
- Fiber amplifier stages: Absorb pump energy and amplify the signal, also producing heat.
- Optical components: Mirrors, lenses, and isolators absorb residual energy.
Estimate heat load:
- Pump diode efficiency: ~50%
- Electrical input power: 20 kW
- Optical output power: 10 kW
- Heat generated: 20 kW - 10 kW = 10 kW
This 10 kW of heat must be managed effectively.
Step 2: Define Thermal Control Objectives
- Maintain component temperatures within manufacturer-specified limits (e.g., < 40°C for pump diodes).
- Minimize thermal gradients to reduce optical distortions.
- Ensure system stability over operational cycles.
Step 3: Select Cooling Methods
Options include:
- Passive cooling: Heat sinks, natural convection.
- Active cooling: Forced air, liquid cooling.
Given the heat load, passive cooling is insufficient. Liquid cooling is preferred for its efficiency and compactness.
Step 4: Design the Cooling Loop
Key components:
- Cold plate: Interface between heat source and coolant.
- Pump: Circulates coolant.
- Heat exchanger: Transfers heat from coolant to environment.
- Reservoir and piping: Maintain coolant volume and flow.
Choose coolant: Deionized water with corrosion inhibitors.
Calculate required flow rate:
Using the formula:
\[ Q = \dot{m} \times C_p \times \Delta T \]
Where:
- Q = heat load (10,000 W)
- \(C_p\) = specific heat capacity of water (~4186 J/kg·°C)
- \(\Delta T\) = allowable temperature rise (e.g., 5°C)
Rearranged:
\[ \dot{m} = \frac{Q}{C_p \times \Delta T} = \frac{10,000}{4186 \times 5} \approx 0.478 \text{ kg/s} \]
Convert to liters per minute (assuming water density ~1 kg/L):
\[ 0.478 \times 60 = 28.7 \text{ L/min} \]
So, the pump must supply roughly 29 L/min.
Step 5: Implement Temperature Monitoring and Control
- Place temperature sensors on pump diodes, fiber amplifiers, and coolant inlet/outlet.
- Use a PID controller to adjust pump speed or coolant temperature.
Step 6: Address Thermal Expansion and Mechanical Stability
- Use materials with matched thermal expansion coefficients for mounts.
- Design flexures or compliant mounts to absorb small expansions.
Mind Map: Thermal Control System Components
Mind Map: Cooling Loop Design Parameters
Example: Calculating Pump Flow Rate for a 10 kW Heat Load
Given:
- Heat load: 10,000 W
- Coolant: Water
- Allowed temperature rise: 5°C
Calculation:
\[ \dot{m} = \frac{Q}{C_p \times \Delta T} = \frac{10,000}{4186 \times 5} = 0.478 \text{ kg/s} \]
Convert to liters per minute:
\[ 0.478 \times 60 = 28.7 \text{ L/min} \]
Interpretation:
The pump must circulate approximately 29 liters per minute to keep the coolant temperature rise within 5°C.
Summary
Designing a thermal control system for a high-power laser requires careful heat load assessment, selection of an appropriate cooling method, and precise control of temperature and flow. Liquid cooling with a well-designed loop and active monitoring is typically necessary for multi-kilowatt lasers. This approach minimizes thermal distortions, protects components, and maintains beam quality.
6. Precision Targeting Strategies
6.1 Target Acquisition and Tracking Fundamentals
Target acquisition and tracking form the backbone of any directed energy system aiming for precision. Without accurate acquisition, the beam cannot be directed effectively; without reliable tracking, the beam risks missing a moving or shifting target.
Target Acquisition
Target acquisition is the process of detecting and identifying a target within the sensor’s field of view. It involves locating the target, determining its position, and preparing the system to engage or monitor it.
Key elements of target acquisition include:
- Detection: Using sensors (e.g., infrared, visible light cameras, radar) to identify objects.
- Identification: Differentiating the target from background clutter or other objects.
- Localization: Determining the target’s precise coordinates relative to the system.
Mind Map: Target Acquisition
Example: A directed energy system uses an infrared camera to scan a region. The camera detects heat signatures, and signal processing algorithms filter out background noise to isolate a vehicle. The system then calculates the vehicle’s position relative to the laser platform.
Target Tracking
Once the target is acquired, tracking maintains continuous knowledge of its position and motion. Tracking compensates for target movement, environmental disturbances, and system vibrations.
Tracking involves:
- Prediction: Estimating the target’s future position based on current trajectory.
- Measurement Update: Continuously updating target position using sensor data.
- Control Adjustment: Modifying beam direction or system parameters to stay locked on target.
Mind Map: Target Tracking
Example: A drone moves unpredictably. The system applies a Kalman filter to smooth noisy position data and predict the drone’s next position. The beam steering mechanism adjusts in real time to maintain alignment.
Integration of Acquisition and Tracking
Acquisition and tracking are tightly linked. Acquisition provides the initial lock, and tracking sustains it. Systems often cycle between reacquisition and tracking to handle lost targets or sudden maneuvers.
Mind Map: Acquisition and Tracking Integration
Example: If a target temporarily moves behind an obstacle, the system switches from tracking mode to reacquisition mode, scanning the area until the target reappears, then resumes tracking.
Practical Considerations
- Sensor Latency: Delays between measurement and processing affect tracking accuracy.
- Environmental Factors: Fog, dust, or turbulence can degrade sensor data.
- Target Characteristics: Size, speed, and signature complexity influence acquisition difficulty.
Summary
Effective target acquisition and tracking require a combination of suitable sensors, robust algorithms, and responsive control systems. Understanding the interplay between detection, identification, localization, prediction, and control adjustment is essential for maintaining beam precision on dynamic targets.
6.2 Integration of Beam Control with Targeting Systems
Integration of beam control with targeting systems is a critical step in ensuring that directed energy systems hit their intended targets with precision and reliability. This integration involves coordinating the beam steering mechanisms, adaptive optics, and the targeting sensors to work as a cohesive unit. The goal is to maintain beam alignment on a moving or stationary target despite environmental disturbances and system imperfections.
Key Components in Integration
- Beam Control Subsystem: Includes actuators (like fast steering mirrors), wavefront sensors, and control algorithms that adjust the beam path.
- Targeting System: Comprises sensors such as cameras, lidar, or radar that detect and track the target.
- Data Fusion and Control Interface: Software that processes sensor data and commands the beam control hardware accordingly.
Integration Challenges
- Synchronizing data rates and latencies between targeting sensors and beam control loops.
- Managing coordinate transformations between the targeting system’s reference frame and the beam control actuators.
- Handling dynamic target motion and environmental disturbances simultaneously.
Mind Map: Integration Overview
Data Flow and Control Loop
The targeting system continuously provides target position and velocity data. This information is transformed into the beam control coordinate system. The beam control algorithms then compute the necessary actuator commands to steer the beam onto the target. Feedback from wavefront sensors and beam position detectors helps correct residual errors.
Mind Map: Data Flow
Example 1: Tracking a Moving Target with a Fast Steering Mirror
A directed energy system uses a camera-based targeting system to track a drone. The camera outputs target coordinates at 60 Hz. These coordinates are converted from image pixels to angular offsets relative to the beam axis. The beam control system uses a fast steering mirror (FSM) to adjust the beam direction.
- The FSM control loop runs at 1 kHz to ensure smooth beam motion.
- A Kalman filter predicts the drone’s future position to compensate for system latency.
- The FSM receives commands to adjust angles, keeping the beam centered on the predicted target position.
This setup demonstrates how integrating targeting data with beam control hardware and predictive algorithms improves tracking accuracy.
Example 2: Coordinating Adaptive Optics with Targeting for Atmospheric Compensation
In a ground-based laser system targeting a distant object, atmospheric turbulence distorts the beam. The targeting system uses a lidar sensor to measure target range and velocity, while a wavefront sensor measures atmospheric distortions.
- Targeting data guides the beam pointing direction.
- Wavefront sensor data feeds into the adaptive optics control loop, adjusting deformable mirrors to correct distortions.
- The system synchronizes these inputs so that beam pointing and wavefront correction happen in tandem.
This coordination ensures the beam remains focused and on target despite atmospheric effects.
Mind Map: Coordinated Control
Best Practices for Integration
- Latency Minimization: Use high-speed communication and processing hardware to reduce delays between sensing and actuation.
- Robust Coordinate Mapping: Implement precise calibration routines to align targeting sensor coordinates with beam control actuators.
- Predictive Filtering: Apply filters like Kalman or particle filters to estimate target motion and compensate for system delays.
- Modular Software Architecture: Design control software with clear interfaces between targeting and beam control modules for easier debugging and upgrades.
- Redundancy and Fault Tolerance: Incorporate backup sensors or fallback modes to maintain operation if one component fails.
Example 3: Modular Software Interface
A system uses separate modules for target tracking and beam control. The targeting module outputs target position and velocity via a standardized message format. The beam control module subscribes to this data stream and computes actuator commands independently. This separation allows developers to update tracking algorithms without affecting beam control logic.
Integrating beam control with targeting systems requires careful attention to timing, coordinate systems, and data processing. By combining sensor data with fast, precise actuators and adaptive optics, directed energy systems can maintain stable, accurate beams on targets under challenging conditions.
6.3 Compensation for Target Motion and Environmental Factors
Compensating for target motion and environmental factors is essential for maintaining beam accuracy in directed energy systems. Targets rarely stay still, and the environment rarely stays constant. Both introduce challenges that must be addressed to ensure the beam hits its intended point with precision.
Understanding Target Motion
Targets can move in predictable or unpredictable ways. Predictable motion includes steady velocity or known trajectories, such as a vehicle moving along a road. Unpredictable motion might involve erratic maneuvers or sudden changes in speed and direction.
Key aspects to consider:
- Velocity and acceleration: Knowing these helps predict where the target will be when the beam arrives.
- Target size and shape: Larger or irregularly shaped targets may require different compensation strategies.
- Latency in control systems: Delays between sensing and beam adjustment can cause errors.
Environmental Factors Affecting Beam Accuracy
Environmental conditions can distort the beam or affect the target’s apparent position:
- Atmospheric turbulence: Causes beam wander and scintillation.
- Wind and temperature gradients: Affect both the beam path and target movement.
- Vibrations and platform motion: If the beam control system is mounted on a moving platform, compensating for its motion is critical.
Strategies for Compensation
-
Predictive Tracking Algorithms
- Use sensor data to estimate future target positions.
- Kalman filters are common tools, blending noisy measurements with motion models.
- Example: A drone moving at a constant speed and direction can be tracked using a linear Kalman filter to predict its position 100 ms ahead, allowing the beam to lead the target.
-
Real-Time Feedback Loops
- Continuously update beam pointing based on live sensor inputs.
- Requires low-latency sensors and actuators.
- Example: A turret with a fast steering mirror adjusts the beam angle in response to jitter detected by a high-speed camera.
-
Environmental Sensing and Compensation
- Use atmospheric sensors (e.g., scintillometers, anemometers) to measure turbulence and wind.
- Adaptive optics can correct wavefront distortions caused by turbulence.
- Example: A laser system uses a Shack-Hartmann wavefront sensor to detect atmospheric distortions and commands a deformable mirror to correct the beam shape.
-
Platform Motion Compensation
- In mobile systems, inertial measurement units (IMUs) detect platform movement.
- Beam steering is adjusted to counteract platform vibrations or shifts.
- Example: A laser mounted on a moving vehicle uses IMU data to stabilize the beam despite bumps and turns.
Mind Map: Compensation for Target Motion and Environmental Factors
Example: Tracking a Fast-Moving Vehicle in Turbulent Conditions
Imagine a directed energy system tasked with targeting a vehicle moving at 30 m/s on a windy day. The system uses radar and optical sensors to track the vehicle’s position. A Kalman filter predicts the vehicle’s future position 200 ms ahead, accounting for acceleration and possible maneuvers. Simultaneously, a Shack-Hartmann wavefront sensor detects atmospheric distortions, commanding a deformable mirror to correct the beam in real time. An IMU on the beam platform compensates for vibrations caused by wind gusts. This multi-layered approach ensures the beam stays locked on the vehicle despite motion and environmental disturbances.
Example: Compensating for Erratic Target Motion
Consider a small drone performing unpredictable maneuvers. The system employs a high-frame-rate camera feeding data into a nonlinear tracking algorithm that adapts to sudden changes in velocity and direction. The beam steering mirror responds within milliseconds to these inputs. Since the drone is small, the system uses a wider beam to maintain coverage, trading off some intensity for reliability. Environmental sensors detect wind shear, prompting adaptive optics adjustments to maintain beam quality.
Summary
Compensation for target motion and environmental factors requires a combination of predictive algorithms, real-time feedback, environmental sensing, and platform stabilization. Each element addresses a different source of error, and together they form a robust approach to maintaining beam precision. Practical implementation depends on the specific scenario, sensor availability, and system latency constraints.
6.4 Sensor Fusion and Data Processing for Enhanced Accuracy
Sensor fusion is the process of combining data from multiple sensors to produce more accurate, reliable, and comprehensive information than any single sensor could provide alone. In directed energy systems, where precision targeting is critical, sensor fusion helps compensate for individual sensor limitations such as noise, latency, or partial coverage.
Why Sensor Fusion Matters
Each sensor type—radar, lidar, infrared, visible light cameras, or inertial measurement units (IMUs)—has strengths and weaknesses. For example, radar can detect targets through obscurants like smoke but with lower resolution; infrared sensors provide thermal signatures but may be affected by atmospheric conditions; visible cameras offer high resolution but struggle in low light. Combining these inputs allows the system to maintain target tracking and beam alignment under varied conditions.
Core Steps in Sensor Fusion
- Data Acquisition: Collect raw data streams from multiple sensors.
- Preprocessing: Filter noise, synchronize timestamps, and normalize data formats.
- Feature Extraction: Identify relevant features such as target position, velocity, or shape.
- Data Association: Match features from different sensors that correspond to the same target.
- Fusion Algorithm Application: Combine data using methods like Kalman filtering, Bayesian inference, or neural networks.
- Output Generation: Produce a unified, refined estimate of target parameters.
Common Fusion Architectures
- Centralized Fusion: Raw data from all sensors is sent to a central processor for combined analysis.
- Decentralized Fusion: Each sensor processes its data locally and sends summarized information to a fusion center.
- Hybrid Fusion: Combines elements of both centralized and decentralized approaches.
Mind Map: Sensor Fusion Workflow
Data Processing Techniques
-
Kalman Filtering: A recursive algorithm that estimates the state of a dynamic system from noisy measurements. It is widely used for tracking moving targets by predicting their next position and correcting based on sensor input.
-
Extended Kalman Filter (EKF): An adaptation of the Kalman filter for nonlinear systems, common in optical beam control where target motion or sensor models are nonlinear.
-
Particle Filters: Use a set of random samples (particles) to represent the probability distribution of the target state, useful when noise or system dynamics are complex.
-
Bayesian Inference: Combines prior knowledge and sensor data probabilistically to update beliefs about target state.
-
Neural Networks: Can learn complex relationships between sensor inputs and target states but require training data and computational resources.
Practical Example: Combining Radar and Infrared Data for Target Tracking
Imagine a directed energy system tracking a fast-moving drone. Radar provides continuous range and velocity data but with coarse angular resolution. An infrared sensor offers fine angular resolution but with intermittent data due to atmospheric interference.
- The radar data is preprocessed to remove spurious reflections.
- Infrared frames are synchronized with radar timestamps.
- Features extracted include drone position estimates from both sensors.
- A Kalman filter fuses these inputs, weighting radar velocity data heavily and infrared angular data when available.
- The fusion output guides the beam steering mechanism, maintaining lock on the drone despite sensor dropouts.
Mind Map: Example Fusion of Radar and Infrared
Challenges and Best Practices
-
Latency Management: Sensors may have different update rates. Synchronizing data streams is crucial to avoid outdated information corrupting fusion results.
-
Handling Conflicting Data: Sensors can disagree due to noise or failures. Fusion algorithms should assign confidence levels and reject outliers.
-
Computational Load: Real-time fusion requires efficient algorithms and hardware capable of processing multiple data streams quickly.
-
Calibration: Accurate sensor alignment and calibration ensure that data from different sensors corresponds spatially and temporally.
-
Redundancy: Including multiple sensors of the same type can improve reliability if one sensor fails.
Summary
Sensor fusion and data processing form the backbone of precision targeting in directed energy systems. By intelligently combining diverse sensor inputs, the system achieves better accuracy, robustness, and resilience against environmental challenges. Implementing fusion requires careful attention to synchronization, algorithm choice, and system architecture, but the payoff is a more reliable and effective beam control strategy.
6.5 Practical Example: Precision Targeting in Dynamic Environments
Precision targeting in dynamic environments requires a system that can adapt quickly to changing conditions such as target movement, atmospheric disturbances, and platform vibrations. This example walks through a scenario where a directed energy system must maintain beam focus on a moving target from a mobile platform, such as a drone or vehicle.
Scenario Overview
- Target: A ground vehicle moving at variable speed and direction.
- Platform: A drone equipped with a high-power laser and adaptive optics.
- Environment: Outdoor setting with moderate atmospheric turbulence and wind.
Key Challenges
- Continuous tracking of a moving target with unpredictable maneuvers.
- Compensating for platform vibrations and motion.
- Correcting atmospheric distortions in real time.
- Maintaining beam stability and focus on the target.
Step 1: Target Acquisition and Tracking
- Use a combination of infrared and visible spectrum cameras to detect and lock onto the target.
- Implement a Kalman filter to predict the target’s future position based on current velocity and acceleration.
- Integrate GPS data from the target (if available) to improve tracking accuracy.
Step 2: Platform Stabilization
- Employ inertial measurement units (IMUs) to detect platform vibrations and angular motion.
- Use active gimbal systems to isolate the laser and optics from platform movement.
- Implement feedback loops that adjust beam pointing in real time based on IMU data.
Step 3: Adaptive Optics Correction
- Use a Shack-Hartmann wavefront sensor to measure atmospheric distortions.
- Apply corrections via a deformable mirror to maintain beam quality.
- Run control algorithms at high frequency (hundreds to thousands of Hz) to keep pace with atmospheric changes.
Step 4: Beam Control and Targeting Integration
- Combine tracking data, platform stabilization, and adaptive optics corrections into a unified control system.
- Prioritize latency reduction to ensure the beam remains locked on the target despite rapid changes.
- Use predictive control to anticipate target maneuvers and adjust beam pointing proactively.
Step 5: Performance Monitoring and Feedback
- Continuously monitor beam spot size and position on the target using a secondary sensor.
- Adjust control parameters dynamically to optimize performance.
- Log data for post-mission analysis and system tuning.
Concrete Example
Imagine the drone detects the target moving at 15 m/s with occasional sharp turns. The Kalman filter predicts the target’s position 0.1 seconds ahead, allowing the beam control system to preemptively adjust pointing angles. The IMU detects a sudden gust causing a 0.5° pitch change; the gimbal compensates within milliseconds, keeping the beam steady.
Meanwhile, the Shack-Hartmann sensor identifies wavefront distortions caused by heat shimmer near the ground. The deformable mirror adjusts its surface shape 1000 times per second, flattening the wavefront and preserving beam focus. The combined system maintains a beam spot size under 10 cm on the moving target at 1 km range.
If the target suddenly accelerates or changes direction, the predictive model updates, and the beam steering commands adapt accordingly. The secondary sensor confirms beam alignment, and minor deviations trigger automatic fine-tuning.
This example illustrates how integrating multiple control layers—tracking, stabilization, adaptive optics, and beam steering—enables precise targeting in a complex, dynamic environment.
7. System Integration and Testing
7.1 Designing Integrated Beam Control and Adaptive Optics Systems
Designing an integrated system that combines beam control and adaptive optics requires a careful balance of hardware, software, and environmental considerations. The goal is to maintain beam quality, stability, and precision targeting under varying operational conditions.
Key Design Considerations
- System Architecture: Define how beam control and adaptive optics components will communicate and operate together. This includes sensor placement, actuator types, and control loop hierarchy.
- Latency and Bandwidth: Adaptive optics corrections often require high-speed feedback loops. Beam control may operate on different timescales. Synchronizing these without introducing lag is critical.
- Environmental Factors: Temperature fluctuations, vibrations, and atmospheric disturbances affect both systems. Design must include mitigation strategies.
- Scalability and Modularity: Systems should accommodate upgrades or changes in mission requirements without full redesign.
Mind Map: Components and Interactions
Integration Strategy
-
Establish a Unified Control Framework: Use a central processing unit or distributed controllers that can handle inputs from both beam control sensors and adaptive optics wavefront sensors. This avoids conflicts and ensures coherent corrections.
-
Prioritize Correction Tasks: Beam control typically handles coarse pointing and jitter reduction, while adaptive optics corrects higher-order wavefront distortions. Design control loops with nested bandwidths—fast, low-amplitude corrections for adaptive optics; slower, larger corrections for beam control.
-
Synchronize Sensor Data: Time-stamp sensor readings and use interpolation if necessary to align data streams. This reduces errors caused by asynchronous measurements.
-
Design for Thermal and Mechanical Stability: Place sensitive components on vibration-isolated mounts and include thermal compensation mechanisms. For example, use materials with low thermal expansion coefficients and active cooling where needed.
Practical Example: Integrating a Fast Steering Mirror with a Deformable Mirror
- Setup: A fast steering mirror (FSM) handles beam pointing, while a deformable mirror (DM) corrects wavefront aberrations.
- Control Loop: FSM receives position feedback from a quad-cell sensor, correcting beam jitter at ~1 kHz. DM receives wavefront data from a Shack-Hartmann sensor, correcting distortions at ~500 Hz.
- Integration: Both controllers feed into a master processor that coordinates commands to avoid conflicting movements.
- Outcome: The beam remains stable on target with minimized wavefront errors, improving overall system performance.
Mind Map: Control Loop Hierarchy
Best Practices
- Modular Testing: Validate beam control and adaptive optics subsystems independently before integration.
- Robust Calibration: Regularly calibrate sensors and actuators to maintain accuracy.
- Redundancy: Include backup sensors or actuators where failure would critically affect system performance.
- Noise Management: Shield electronics and use filtering algorithms to reduce sensor noise.
Practical Example: Calibration Workflow
- Align wavefront sensor with laser beam.
- Apply known aberrations using a reference deformable mirror shape.
- Measure sensor response and adjust calibration matrix.
- Repeat for beam control sensors using controlled beam displacements.
By carefully considering these design elements and following structured integration steps, an effective and reliable combined beam control and adaptive optics system can be realized. This approach ensures that the system maintains beam quality and targeting precision even in challenging operational environments.
7.2 Testing Protocols for Stability and Performance
Testing protocols for stability and performance in directed energy systems are essential to ensure reliable operation under real-world conditions. These protocols focus on verifying that beam control and adaptive optics components maintain their intended function over time and across varying environmental factors.
Key Testing Objectives
- Confirm system stability under static and dynamic conditions.
- Measure beam quality and wavefront correction accuracy.
- Evaluate thermal effects on optical components and their compensation.
- Validate response times and control loop effectiveness.
- Detect and diagnose sources of drift or degradation.
Mind Map: Testing Protocols Overview
Stability Testing
Static Stability involves holding the system steady and measuring beam pointing and wavefront errors over time. This helps identify slow drifts caused by thermal expansion, mechanical creep, or electronic noise.
Example: A laser beam is locked on a fixed target for 8 hours. Beam position sensors record deviations every minute. Data analysis reveals a slow drift of 5 microradians per hour, traced back to temperature fluctuations in the optical bench.
Dynamic Stability tests the system’s ability to maintain beam quality during intentional disturbances, such as platform vibrations or rapid steering commands.
Example: The beam control system is subjected to simulated platform jitter using a shaker table. The adaptive optics system compensates for induced wavefront distortions within 10 milliseconds, maintaining beam quality within specification.
Beam Quality Assessment
Wavefront sensors and beam profilers are used to quantify beam quality. Key metrics include root-mean-square (RMS) wavefront error and beam spot size.
Example: A Shack-Hartmann wavefront sensor measures the beam before and after adaptive optics correction. The RMS error reduces from 0.3 wavelengths to 0.05 wavelengths, confirming effective correction.
Beam profile analysis involves capturing the intensity distribution across the beam cross-section to detect hot spots or asymmetries.
Example: A CCD camera records the beam profile, revealing a slight elliptical distortion. Adjustments to the deformable mirror restore circular symmetry.
Thermal Management Evaluation
Thermal effects can degrade beam quality through lensing and mechanical deformation. Testing includes monitoring temperature at critical points and observing corresponding beam changes.
Example: Thermocouples placed on the laser gain medium and optical mounts track temperature during extended operation. Beam drift correlates with a 10°C rise in mount temperature, prompting improved cooling design.
Thermal drift compensation is tested by deliberately heating components and verifying that adaptive optics or beam control systems correct resulting aberrations.
Example: A heater raises the temperature of a mirror mount by 5°C. The adaptive optics system detects and compensates for the induced wavefront distortion within 30 seconds.
Control Loop Verification
Control loops are tested for speed, accuracy, and stability. Step response tests involve applying a known disturbance and measuring system reaction.
Example: A step input changes the beam pointing angle by 100 microradians. The control system returns the beam to target within 50 milliseconds without overshoot.
Frequency response analysis identifies bandwidth limits and potential resonances in the control system.
Example: A frequency sweep applied to the beam steering actuator shows a -3 dB bandwidth of 200 Hz, sufficient for expected disturbance frequencies.
Environmental Stress Testing
Systems are exposed to vibration, temperature cycling, and humidity changes to verify robustness.
Example: The entire optical assembly undergoes temperature cycling from -20°C to 50°C while beam quality is monitored. No permanent degradation is observed.
Vibration tests simulate transport or operational conditions.
Example: Vibration at 10 g RMS is applied for 30 minutes. Post-test beam alignment remains within tolerance.
Documentation and Reporting
Accurate test logs record conditions, measurements, and anomalies. Tracking trends over multiple tests helps identify gradual performance changes.
Example: A spreadsheet logs beam pointing error, wavefront RMS, and temperature every hour. A trend line shows gradual improvement after system recalibration.
Summary Example: Comprehensive Stability Test
A directed energy system undergoes a 24-hour continuous operation test. Beam pointing and wavefront error are recorded every 5 minutes. Thermal sensors monitor component temperatures. At hour 12, a controlled vibration disturbance is introduced for 10 minutes. The control system compensates within 15 milliseconds, maintaining beam quality. Post-test analysis shows a maximum beam drift of 3 microradians and wavefront RMS error below 0.07 wavelengths throughout. Thermal management successfully limits temperature rises to under 8°C. The test confirms system stability and performance under extended operation and environmental stress.
7.3 Troubleshooting Common Issues in Directed Energy Systems
Troubleshooting directed energy systems requires a systematic approach because these systems combine optics, electronics, thermal management, and control algorithms. Problems often arise from interactions among these components rather than isolated failures. This section breaks down common issues, their causes, and practical steps to identify and fix them.
Common Issues Mind Map
Beam Instability
Symptoms: Beam jitter, wandering, or fluctuations in intensity.
Causes and Fixes:
-
Mechanical Vibrations: Check mounts and optical benches for looseness. Tighten or replace vibration isolators. Example: In a test setup, a loose mirror mount caused beam jitter; securing the mount eliminated the problem.
-
Control Loop Errors: Verify feedback sensor signals and actuator responses. Use diagnostic tools to monitor loop stability. Example: A misconfigured PID controller caused oscillations; retuning the parameters stabilized the beam.
-
Thermal Distortions: Inspect optics for thermal gradients. Improve cooling or add thermal compensators. Example: A high-power laser’s beam quality degraded after extended operation; adding water cooling to the laser head restored stability.
Degraded Beam Quality
Symptoms: Increased beam divergence, distorted wavefront, or reduced focus.
Causes and Fixes:
-
Optical Misalignment: Use alignment lasers and beam profilers to check optical path. Realign components as needed. Example: A misaligned deformable mirror caused wavefront errors; realignment improved beam shape.
-
Wavefront Sensor Errors: Calibrate sensors regularly. Replace faulty sensors. Example: A faulty Shack-Hartmann sensor produced noisy data; replacing it improved adaptive optics correction.
-
Contaminated Optics: Inspect and clean optics with appropriate solvents and techniques. Example: Dust on a lens caused scattering; cleaning restored beam clarity.
Thermal Management Failures
Symptoms: Thermal lensing, focal shift, or component damage.
Causes and Fixes:
-
Insufficient Cooling: Check coolant flow rates and temperatures. Repair leaks or blockages. Example: Reduced coolant flow led to thermal lensing; fixing a clogged tube resolved the issue.
-
Hot Spots on Optics: Use thermal imaging to locate hotspots. Adjust beam path or cooling. Example: A mirror coating absorbed excess heat; swapping to a higher-damage-threshold coating reduced hotspots.
-
Thermal Drift: Monitor temperature sensors and compensate in control algorithms. Example: A laser cavity length changed with temperature; adding active temperature control stabilized output.
Targeting and Tracking Errors
Symptoms: Missed targets, lagging response, or inaccurate pointing.
Causes and Fixes:
-
Sensor Calibration: Regularly calibrate tracking sensors against known references. Example: A miscalibrated camera caused target offset; recalibration corrected the pointing.
-
Environmental Interference: Account for wind, vibration, or atmospheric effects in control algorithms. Example: Wind-induced platform sway was compensated by predictive filtering.
-
Software Glitches: Check logs for errors, update firmware, and verify data processing pipelines. Example: A software bug caused intermittent tracking loss; patching the code fixed it.
Electrical and Control Failures
Symptoms: System resets, erratic actuator movement, or loss of control signals.
Causes and Fixes:
-
Power Supply Issues: Measure voltages and currents; replace faulty power units. Example: Voltage dips caused actuator jitter; replacing the power supply stabilized operation.
-
Signal Noise: Use shielded cables and proper grounding. Add filters if necessary. Example: Electromagnetic interference from nearby equipment introduced noise; rerouting cables reduced it.
-
Controller Malfunctions: Perform hardware diagnostics and firmware updates. Example: A controller board overheated and malfunctioned; adding a heat sink restored function.
Practical Example: Diagnosing Beam Jitter in a High-Power Laser
- Observation: The beam jitters noticeably during operation.
- Step 1: Inspect mechanical mounts; found a loose mirror mount.
- Step 2: Tighten mount and verify beam stability; jitter reduced but not eliminated.
- Step 3: Check control loop signals; found oscillations in feedback.
- Step 4: Retune PID controller parameters; beam stabilized.
- Step 5: Monitor thermal sensors; detected rising temperature near optics.
- Step 6: Improve cooling system; final beam stability achieved.
Troubleshooting is about isolating variables and testing hypotheses one at a time. Keeping detailed logs and using diagnostic tools like beam profilers, thermal cameras, and oscilloscopes accelerates problem identification. Remember, the simplest cause is often the culprit, so start with mechanical and alignment checks before diving into complex control or thermal issues.
7.4 Documentation and Maintenance Best Practices
Effective documentation and maintenance are the backbone of reliable directed energy systems. Without clear records and consistent upkeep, even the most advanced beam control and adaptive optics setups will falter. This section focuses on practical strategies to keep your system running smoothly and your team informed.
Why Documentation Matters
Documentation serves multiple purposes: it preserves knowledge, supports troubleshooting, ensures compliance, and facilitates training. When a system behaves unexpectedly, a well-maintained log or manual can save hours or days of guesswork.
Key Documentation Components
- System Schematics and Diagrams: Visual representations of optical paths, control loops, and hardware connections.
- Operating Procedures: Step-by-step instructions for startup, calibration, and shutdown.
- Maintenance Logs: Records of inspections, repairs, and component replacements.
- Calibration Records: Dates, methods, and results of wavefront sensor and actuator calibrations.
- Troubleshooting Guides: Common issues, diagnostic steps, and corrective actions.
Best Practices Mind Map
Maintenance Scheduling
Regular inspections prevent small issues from becoming system failures. Create a calendar that includes:
- Optical surface cleaning every 1–3 months depending on environment
- Wavefront sensor calibration quarterly
- Actuator and deformable mirror performance checks biannually
- Cooling system inspection monthly
Example: A directed energy lab in a dusty environment schedules optical cleaning monthly, while a cleanroom facility extends this to quarterly. Adjust frequency based on operational conditions.
Maintenance Log Example
| Date | Component | Action Taken | Notes |
|---|---|---|---|
| 2024-03-15 | Deformable Mirror | Recalibrated actuator offsets | Drift detected during testing |
| 2024-04-01 | Cooling System | Replaced coolant pump | Preventive maintenance |
| 2024-04-10 | Wavefront Sensor | Cleaned lens and realigned | Improved signal-to-noise ratio |
Documentation Tips
- Use clear, concise language avoiding jargon where possible.
- Include photos or annotated diagrams to clarify complex steps.
- Version control your documents to track changes over time.
- Store documentation in accessible, backed-up digital repositories.
Troubleshooting Documentation Mind Map
Example: Troubleshooting a Beam Wander Issue
- Symptom: Beam position fluctuates beyond tolerance.
- Diagnostic Steps: Check actuator response, verify wavefront sensor data, inspect mechanical mounts.
- Root Cause: Loose mirror mount causing mechanical instability.
- Corrective Action: Tighten mount, recalibrate control loop.
- Verification: Run stability test; beam wander reduced to acceptable levels.
Software and Firmware Maintenance
Keep control software and firmware updated to fix bugs and improve performance. Document update versions, dates, and any changes in behavior. Before applying updates, back up current configurations and test in a controlled environment.
Spare Parts and Inventory Management
Maintain an inventory of critical components such as sensors, actuators, and cooling system parts. Document part numbers, suppliers, and lead times. This reduces downtime when replacements are needed.
Summary
Good documentation and maintenance practices are not just administrative tasks; they are essential to the longevity and performance of directed energy systems. Clear records, scheduled upkeep, and thoughtful troubleshooting guides create a foundation for consistent operation and easier problem resolution.
7.5 Practical Example: Comprehensive System Test of a Directed Energy Platform
Testing a directed energy platform involves a systematic approach to verify the integration and performance of beam control, adaptive optics, thermal management, and targeting subsystems. This example outlines a step-by-step procedure, supported by mind maps, to ensure the platform meets operational requirements.
Step 1: Pre-Test Setup and Baseline Measurements
Before activating the system, verify all hardware connections, power supplies, and environmental controls. Establish baseline measurements for beam quality, wavefront error, temperature distribution, and pointing accuracy.
- Beam Quality Baseline: Measure M² factor and beam profile at the output aperture.
- Wavefront Baseline: Use a wavefront sensor to record initial aberrations.
- Thermal Baseline: Record temperatures of critical optical components.
- Pointing Baseline: Confirm alignment with a fixed target.
Mind Map: Pre-Test Setup
Step 2: Beam Control Loop Verification
Activate the beam control system and verify the feedback loops. Introduce controlled disturbances such as mechanical vibrations or intentional misalignment to test system response.
- Monitor actuator responses to sensor inputs.
- Measure settling time and steady-state error.
- Confirm stability margins using frequency response analysis.
Mind Map: Beam Control Loop Test
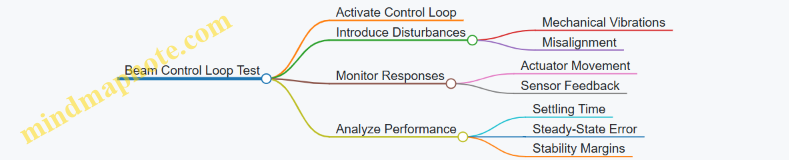
Example: Applying a 0.1 mrad angular displacement to the beam steering mirror and observing the system’s ability to restore beam position within 50 ms.
Step 3: Adaptive Optics Calibration and Testing
Test the adaptive optics (AO) subsystem by applying known wavefront distortions and verifying correction accuracy.
- Use a deformable mirror to introduce aberrations.
- Measure wavefront sensor readings before and after AO correction.
- Evaluate residual wavefront error.
Mind Map: Adaptive Optics Testing
Example: Introduce a 0.5 μm peak-to-valley spherical aberration and confirm AO reduces residual error to below 0.05 μm RMS.
Step 4: Thermal Management Assessment
Operate the laser at nominal power and monitor thermal effects on optical components and beam quality.
- Record temperature changes over time.
- Observe beam distortion correlated with thermal gradients.
- Test cooling system response and stability.
Mind Map: Thermal Management Test
Example: Run the laser at full power for 30 minutes, noting a maximum optic temperature increase of 15°C and beam quality degradation less than 5%.
Step 5: Precision Targeting and Tracking Validation
Simulate target motion and environmental disturbances to test targeting algorithms and beam steering accuracy.
- Use a moving target simulator or galvo mirrors.
- Measure tracking error and latency.
- Test sensor fusion if multiple sensors are integrated.
Mind Map: Targeting and Tracking Test
Example: Track a target moving at 2 m/s with a maximum pointing error under 0.2 mrad and latency below 100 ms.
Step 6: Full System Integration Test
Run the entire platform with all subsystems active. Monitor system behavior under combined disturbances.
- Introduce simultaneous mechanical vibration, thermal load, and target motion.
- Verify beam stability, wavefront correction, thermal control, and targeting accuracy.
- Record system logs for performance analysis.
Mind Map: Full System Integration Test
Example: During a 10-minute test, the system maintains beam pointing within 0.1 mrad, wavefront error below 0.05 μm RMS, and component temperatures within safe limits despite simulated disturbances.
Step 7: Post-Test Analysis and Reporting
Analyze collected data to identify performance trends, anomalies, and areas for improvement.
- Compare test results against baseline and specifications.
- Document any deviations and corrective actions.
- Prepare a comprehensive test report.
Mind Map: Post-Test Analysis
Example: Noting a slight drift in beam pointing correlated with temperature rise, leading to a recommendation for enhanced thermal insulation.
This structured approach ensures each subsystem is verified individually and in concert with others. The use of mind maps helps visualize the testing workflow, making complex interactions easier to manage and communicate.
8. Case Studies and Applications
8.1 Military Directed Energy Systems: Beam Control Challenges and Solutions
Military directed energy systems (DES) rely heavily on precise beam control to achieve their intended effects. The challenges in this domain stem from the complex operational environment, the high power levels involved, and the need for rapid, accurate targeting under variable conditions.
Beam Control Challenges in Military DES
- Atmospheric Disturbances: Military systems often operate outdoors where atmospheric turbulence, dust, humidity, and temperature gradients distort the beam. These distortions reduce beam focus and energy delivery efficiency.
- Platform Instability: Many DES are mounted on moving platforms such as aircraft, ships, or ground vehicles. Vibrations, platform motion, and mechanical flexing introduce pointing errors.
- Thermal Effects: High-power beams heat optical components, causing thermal lensing and deformation that degrade beam quality.
- Rapid Target Dynamics: Targets may move unpredictably or at high speeds, requiring fast and accurate beam steering and adaptive optics corrections.
- Electromagnetic Interference (EMI): Military environments often have significant EMI, which can affect sensor accuracy and control electronics.
Solutions and Best Practices
Adaptive Optics Integration
Adaptive optics (AO) systems correct wavefront distortions in real-time. Military DES use deformable mirrors and wavefront sensors to compensate for atmospheric turbulence and thermal aberrations.
- Example: A ship-based laser employs a Shack-Hartmann wavefront sensor feeding data to a deformable mirror. This setup corrects for sea spray-induced turbulence and platform vibrations, maintaining beam focus on a moving target.
Vibration Isolation and Stabilization
Mechanical isolation systems and active stabilization platforms reduce the impact of platform motion.
- Example: An airborne laser uses gyroscopically stabilized gimbals combined with inertial measurement units (IMUs) to maintain beam pointing despite aircraft maneuvers.
Thermal Management
Cooling systems and thermally resistant optics minimize thermal distortions.
- Example: A ground-based high-energy laser incorporates liquid-cooled mirrors and heat sinks, reducing thermal lensing during extended firing sequences.
High-Speed Beam Steering
Fast steering mirrors and control algorithms enable rapid beam repositioning to track dynamic targets.
- Example: A counter-drone laser system uses fast piezoelectric mirrors controlled by predictive tracking algorithms to maintain lock on erratic drone movements.
EMI-Hardened Electronics
Shielding and robust circuit design ensure control systems function reliably in electromagnetic-rich environments.
- Example: A mobile laser platform employs shielded cables and redundant sensors to maintain beam control integrity during electronic warfare conditions.
Mind Map: Military Directed Energy Beam Control Challenges and Solutions
Practical Example: Beam Control on a Ship-Based Directed Energy Weapon
A naval laser weapon must maintain beam quality over long distances through a turbulent marine atmosphere. The system uses a Shack-Hartmann wavefront sensor to detect distortions caused by temperature gradients and sea spray. Data from the sensor drives a deformable mirror that adjusts its surface shape hundreds of times per second to correct the beam. To counteract ship motion, the laser is mounted on a stabilized platform with inertial sensors and active dampers. Cooling channels embedded in the primary mirror prevent thermal deformation during extended firing. This combination ensures the beam remains tightly focused on fast-moving targets like small boats or drones.
Summary
Military directed energy beam control involves managing a range of physical and environmental challenges. Solutions combine adaptive optics, mechanical stabilization, thermal management, and robust electronics. Each element contributes to maintaining beam stability and precision, which are critical for effective operation in demanding military contexts.
8.2 Industrial Applications: Precision Cutting and Welding
In industrial settings, directed energy systems—particularly lasers—are widely used for precision cutting and welding. The quality and efficiency of these processes rely heavily on effective beam control and adaptive optics. These technologies ensure the beam maintains its shape, focus, and stability despite environmental and operational challenges.
Beam Control in Industrial Cutting and Welding
Beam control systems regulate the position, shape, and intensity of the laser beam. In cutting and welding, the beam must be precisely directed to the target area to achieve clean cuts or strong welds without damaging surrounding material.
Key factors include:
- Beam Stability: Minimizing jitter and drift to maintain consistent contact with the workpiece.
- Focus Control: Adjusting the focal point to optimize energy delivery depending on material thickness and type.
- Power Modulation: Controlling laser power to balance penetration depth and heat input.
Adaptive Optics Role
Adaptive optics compensate for distortions caused by thermal lensing in optical components and air turbulence near the workpiece. These distortions can degrade beam quality, leading to uneven cuts or weak welds.
By using wavefront sensors and deformable mirrors, adaptive optics systems correct these aberrations in real time, preserving beam quality.
Mind Map: Components of Beam Control and Adaptive Optics in Industrial Laser Processing
Practical Example: Laser Cutting of Stainless Steel Sheets
Consider a laser cutting system used to slice 2 mm thick stainless steel sheets. The beam control system maintains beam position with a precision of ±10 microns to ensure straight cuts. Adaptive optics correct for thermal lensing caused by heat buildup in the focusing lens, which otherwise would cause the beam waist to shift and degrade cut quality.
The system uses a Shack-Hartmann wavefront sensor to detect distortions and a deformable mirror to adjust the wavefront accordingly. This correction allows the laser to maintain a tight focus, producing clean edges with minimal dross.
Challenges and Solutions
-
Thermal Distortion: High-power lasers heat optical components, causing refractive index changes. Adaptive optics counteract this by dynamically adjusting the wavefront.
-
Mechanical Vibrations: Factory environments introduce vibrations that can misalign the beam. Beam control systems incorporate vibration isolation mounts and fast feedback loops to stabilize the beam.
-
Material Variability: Different materials and thicknesses require adjustments in focus and power. Automated focus control and power modulation adapt the beam parameters on the fly.
Mind Map: Industrial Laser Cutting and Welding Process Considerations
Practical Example: Laser Welding of Automotive Components
In automotive manufacturing, laser welding joins thin metal sheets rapidly and with minimal heat-affected zones. Beam control ensures the laser spot tracks the weld seam accurately, even on curved surfaces.
Adaptive optics compensate for beam distortions caused by thermal gradients and slight misalignments in the optical path. The system uses real-time feedback from sensors monitoring the weld pool to adjust beam focus and position, maintaining weld quality.
Summary
Effective beam control and adaptive optics are essential for industrial laser cutting and welding. They improve precision, reduce defects, and increase throughput. By integrating these technologies, manufacturers can handle a variety of materials and geometries with consistent quality.
The examples above illustrate how these systems operate in real-world scenarios, highlighting the importance of stability, thermal management, and precise targeting in industrial applications.
8.3 Scientific Research: Adaptive Optics in Astronomy and Laser Experiments
Adaptive optics (AO) has become a cornerstone in scientific research, particularly in astronomy and laser experiments, where controlling wavefront distortions is critical. In astronomy, AO compensates for atmospheric turbulence that blurs images captured by ground-based telescopes. In laser experiments, AO corrects distortions caused by thermal effects or optical imperfections to maintain beam quality and precision.
Adaptive Optics in Astronomy
The Earth’s atmosphere introduces random fluctuations in the refractive index, distorting incoming light from celestial objects. This distortion reduces image resolution and contrast. AO systems measure these distortions in real time and adjust deformable mirrors to correct the wavefront, restoring image clarity.
Key components include:
- Wavefront Sensor (WFS): Typically a Shack-Hartmann sensor that samples the incoming wavefront and detects deviations.
- Deformable Mirror (DM): A mirror with actuators that change its shape to counteract measured distortions.
- Control System: Processes WFS data and commands the DM adjustments.
Example: AO in Large Telescopes
The Keck Observatory uses AO to achieve near-diffraction-limited imaging. By measuring wavefront distortions from a reference star or laser guide star, the system adjusts the DM hundreds of times per second. This correction allows astronomers to resolve features on distant planets and galaxies that would otherwise be blurred.
Adaptive Optics in Laser Experiments
High-power laser systems often suffer from wavefront distortions due to thermal lensing, optical surface imperfections, or air turbulence within the beam path. AO systems help maintain beam quality by dynamically correcting these distortions.
For instance, in laser fusion experiments, precise focusing of laser beams onto a target is essential. AO compensates for thermal gradients in optical components that would otherwise defocus or distort the beam.
Example: AO in High-Power Laser Facilities
At facilities like the National Ignition Facility, AO systems use wavefront sensors and deformable mirrors to correct beam aberrations before the laser pulses reach the target chamber. This ensures the energy is delivered with the intended spatial profile and intensity.
Mind Map: Adaptive Optics in Scientific Research
Practical Considerations
- Latency: AO systems must operate at high speed to track rapidly changing distortions. In astronomy, this means hundreds to thousands of corrections per second.
- Calibration: Accurate calibration of wavefront sensors and deformable mirrors is essential to avoid introducing errors.
- Reference Sources: In astronomy, natural guide stars are not always available; laser guide stars provide an artificial reference but add complexity.
- Thermal Effects: In laser experiments, thermal distortions can vary with power levels, requiring adaptive calibration.
Example: Wavefront Correction Cycle
- The wavefront sensor measures incoming light distortions.
- The control system computes the necessary mirror shape adjustments.
- The deformable mirror actuators reshape the mirror surface.
- The corrected wavefront improves image quality or beam focus.
This cycle repeats continuously, typically at kilohertz rates in advanced systems.
Summary
Adaptive optics in scientific research is about real-time correction of wavefront errors to improve image resolution in astronomy or maintain beam quality in laser experiments. The integration of sensors, deformable mirrors, and control algorithms allows these systems to counteract environmental and system-induced distortions effectively. Concrete examples from large telescopes and high-power laser facilities illustrate how AO enhances performance by stabilizing and refining optical wavefronts.
8.4 Practical Example: Beam Control Implementation in a Defense Directed Energy System
In this section, we examine a concrete example of how beam control is implemented in a defense-directed energy system. The goal is to maintain beam stability, compensate for atmospheric disturbances, and achieve precise targeting under operational conditions.
System Overview
The system consists of a high-power laser source, beam steering optics, adaptive optics modules, wavefront sensors, and a control unit. The laser output is directed toward a moving target several kilometers away. The beam control system must correct for platform vibrations, atmospheric turbulence, and thermal distortions.
Mind Map: Key Components and Functions
Step 1: Initial Beam Stabilization
The first step is to stabilize the beam against mechanical vibrations from the platform. Fast steering mirrors (FSMs) mounted on piezoelectric actuators adjust the beam angle rapidly. The control unit receives input from inertial sensors and beam position detectors to correct angular deviations.
Example: When the platform experiences a sudden pitch change of 0.01 degrees, the FSM adjusts within milliseconds to maintain beam alignment. This prevents beam drift that could reduce energy delivery on target.
Step 2: Atmospheric Distortion Compensation
Atmospheric turbulence causes wavefront distortions that degrade beam quality. A Shack-Hartmann wavefront sensor measures these distortions by analyzing the incoming reference beam reflected from a cooperative target or an artificial beacon.
The deformable mirror (DM) then adjusts its surface shape to counteract the measured aberrations. This closed-loop adaptive optics system runs at hundreds of Hertz to keep up with rapidly changing atmospheric conditions.
Example: On a day with moderate turbulence, the wavefront sensor detects aberrations causing a 20% drop in Strehl ratio. The DM corrects these in real-time, restoring beam focus and improving energy concentration on the target.
Step 3: Thermal Distortion Management
High-power lasers generate heat that can warp optical components, leading to beam distortion. Temperature sensors embedded near critical optics feed data to the control unit, which adjusts cooling systems accordingly.
Thermal compensation algorithms predict deformation patterns and preemptively modify the DM shape to offset thermal effects.
Example: After continuous operation for 15 minutes, the primary mirror temperature rises by 5°C, causing a slight convex deformation. The system detects this and reshapes the DM to maintain beam quality.
Step 4: Precision Targeting and Tracking
The beam control system integrates with target tracking sensors, such as radar or electro-optical trackers. Predictive algorithms estimate target motion and environmental factors like wind.
The FSM and adaptive optics adjust the beam path dynamically to maintain focus on the moving target.
Example: A target moving at 50 m/s with erratic maneuvers is tracked continuously. The control system updates beam pointing angles and wavefront corrections 500 times per second to keep the beam locked.
Mind Map: Control Loop Workflow
Integration Challenges and Solutions
-
Latency: The system must minimize delay between sensing and actuation. Using FPGA-based processing units reduces latency to microseconds.
-
Noise: Sensor noise can cause false corrections. Applying Kalman filters helps distinguish true disturbances from noise.
-
Thermal-Mechanical Coupling: Heat-induced mechanical stress can shift optical alignments. Combining thermal sensors with strain gauges provides a fuller picture for compensation.
-
Environmental Variability: Rapid changes in atmospheric conditions require adaptive control parameters. The system adjusts control gains based on real-time performance metrics.
Summary
This example shows how beam control in a defense-directed energy system involves multiple layers of sensing and correction. From mechanical stabilization and adaptive optics to thermal management and targeting integration, each component plays a role in maintaining beam quality and accuracy. The system operates as a tightly coupled feedback network, continuously adjusting to internal and external disturbances to deliver energy precisely where intended.
8.5 Practical Example: Adaptive Optics Enhancements in Industrial Laser Processing
Industrial laser processing involves tasks like cutting, welding, and surface treatment, where beam quality directly impacts precision and efficiency. Adaptive optics (AO) can improve these processes by correcting wavefront distortions caused by thermal effects, optical imperfections, or environmental factors. This example outlines how AO can be integrated into an industrial laser system and the benefits it brings.
Problem Context
In high-power laser cutting, thermal lensing in optical components causes beam distortion, leading to a defocused spot and uneven cuts. The beam profile changes dynamically as the system heats up, reducing process consistency.
AO System Integration
An AO system typically includes a wavefront sensor, a deformable mirror (DM), and a control algorithm. In this setup:
- The wavefront sensor measures distortions in the laser beam after it passes through the optical train.
- The control system calculates the required corrections.
- The deformable mirror adjusts its surface shape in real time to compensate for distortions.
This closed-loop system maintains a near-ideal beam profile on the workpiece.
Mind Map: AO Components in Industrial Laser Processing
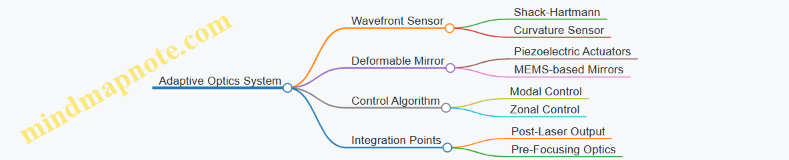
Implementation Steps
- Baseline Measurement: Measure the beam profile and wavefront without AO to establish a reference.
- Sensor Placement: Install the wavefront sensor after the laser output but before the focusing optics.
- Mirror Installation: Place the deformable mirror in the beam path where it can effectively correct distortions.
- Control Loop Tuning: Develop and tune the control algorithm for real-time correction, balancing speed and stability.
- Testing Under Load: Run the laser at operational power levels, monitoring beam quality and process outcomes.
Practical Example: Welding Stainless Steel Sheets
- Without AO: The beam spot size fluctuates due to thermal lensing, causing inconsistent weld penetration and occasional defects.
- With AO: The deformable mirror compensates for wavefront errors, stabilizing the spot size and shape.
Results show improved weld consistency, reduced defects, and less rework.
Mind Map: Benefits of AO in Industrial Laser Processing
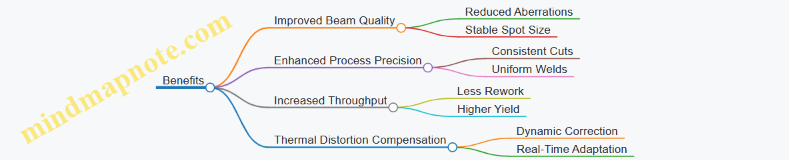
Example: Quantitative Improvement
In a test case, the beam quality factor (M²) improved from 1.8 to 1.2 with AO engaged. This translated into a 15% increase in cutting speed without loss of edge quality.
Considerations and Best Practices
- Sensor Noise: Use sensors with adequate sensitivity and dynamic range to detect subtle distortions.
- Mirror Response: Select deformable mirrors with sufficient actuator density and stroke to correct expected aberrations.
- Control Latency: Minimize delay in the control loop to handle fast-changing distortions.
- Environmental Stability: Shield the system from vibrations and airflow that can introduce additional wavefront errors.
Mind Map: Challenges and Solutions
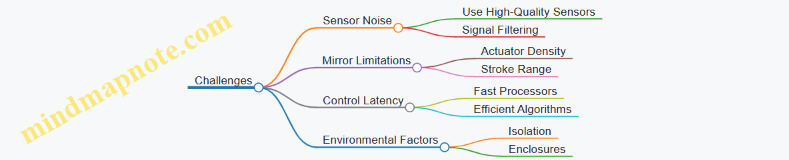
In summary, integrating adaptive optics into industrial laser processing systems can significantly improve beam stability and process precision. By actively correcting wavefront distortions, AO enables higher quality and efficiency in tasks like cutting and welding. The example here demonstrates practical steps and measurable benefits, highlighting AO as a valuable tool in industrial laser applications.
9. Safety, Standards, and Compliance
9.1 Safety Considerations in High-Power Laser Operations
High-power lasers pose unique safety challenges that require careful planning and strict adherence to protocols. The risks primarily involve eye and skin injuries, fire hazards, and electrical dangers. Understanding these risks and implementing layered safety measures is essential to protect personnel and equipment.
Key Safety Risks
- Eye Injury: The eye is particularly vulnerable because laser beams can cause retinal burns or corneal damage, often without immediate pain or warning.
- Skin Burns: High-power beams can cause thermal burns on skin upon direct or reflected exposure.
- Fire Hazards: Intense laser energy can ignite flammable materials or cause damage to components.
- Electrical Hazards: High-voltage power supplies used in laser systems pose shock risks.
Mind Map: Core Safety Concerns in High-Power Laser Operations
Eye Protection
Laser safety eyewear must be selected based on the laser’s wavelength and power density. Eyewear with insufficient optical density (OD) can give a false sense of security. For example, a 1,064 nm Nd:YAG laser requires eyewear rated for that wavelength with an OD sufficient to reduce the beam intensity below the maximum permissible exposure (MPE). Regular inspection for scratches or damage is critical because compromised lenses reduce protection.
Example: In a directed energy lab using a 10 kW fiber laser at 1,070 nm, operators wear eyewear with OD 7+ at that wavelength. The eyewear is inspected weekly, and any damage leads to immediate replacement.
Skin Protection
While the eye is the most sensitive, skin exposure to high-power beams can cause burns. Wearing flame-resistant lab coats and gloves reduces risk. Additionally, controlling access to beam paths and using beam enclosures minimizes accidental exposure.
Example: During beam alignment, operators wear Nomex lab coats and gloves. The beam path is enclosed with interlocked barriers that disable the laser if breached.
Fire Prevention
Materials near the beam path should be non-flammable or flame-retardant. Beam dumps and absorbers must be designed to handle the laser power without degradation. Fire extinguishers rated for electrical and chemical fires should be accessible.
Example: A beam dump in a high-power laser test area uses graphite-based absorbers mounted on metal plates. The surrounding area is cleared of paper, plastics, and other flammable materials.
Electrical Safety
High-power lasers often require high-voltage power supplies. Proper grounding, insulated cables, and lockout/tagout procedures during maintenance prevent electrical accidents.
Example: Before servicing a laser power supply, technicians follow a lockout/tagout checklist ensuring all capacitors are discharged and power is physically disconnected.
Administrative Controls
Training is the backbone of laser safety. Personnel must understand hazards, emergency procedures, and proper equipment use. SOPs should be clear, accessible, and regularly updated. Warning signs indicating laser class and hazards must be posted at entry points.
Example: All new staff complete a laser safety course and pass a written test before accessing the laser lab. SOPs are reviewed quarterly and posted near the laser system.
Mind Map: Layers of Laser Safety Controls
Practical Example: Incident Prevention During Beam Alignment
During alignment of a high-power laser, the beam is often at lower power but still hazardous. Operators use low-power alignment lasers co-aligned with the main beam. The main laser is interlocked to prevent accidental firing. Operators wear appropriate eyewear and follow a checklist that includes verifying all barriers and warning signs are in place.
This layered approach—engineering controls, administrative procedures, and PPE—reduces the chance of injury.
Summary
Safety in high-power laser operations depends on understanding the specific hazards and implementing multiple layers of protection. Proper eyewear, skin protection, fire prevention, electrical safety, and thorough training form the foundation. Regular inspections, clear procedures, and a culture of safety ensure that risks remain manageable.
Keeping safety straightforward and consistent helps everyone stay focused on the task without unnecessary distractions or risks.
9.2 Regulatory Standards for Directed Energy Systems
Directed energy systems operate in a tightly regulated environment due to their potential impact on safety, security, and the environment. Understanding and complying with these regulations is essential for developers, operators, and integrators. This section outlines the key regulatory frameworks, standards, and compliance requirements relevant to directed energy technologies.
Overview of Regulatory Domains
Directed energy systems intersect several regulatory domains, including:
- Laser Safety Regulations: Governing the classification, labeling, and safe operation of lasers.
- Electromagnetic Emissions Standards: Managing interference and exposure limits.
- Environmental and Occupational Safety: Addressing thermal effects, hazardous materials, and workplace safety.
- Export Controls and Military Use Restrictions: Controlling technology transfer and use in defense applications.
Laser Safety Standards
Laser safety standards are the backbone of regulatory control for directed energy systems. They define laser classes based on output power and wavelength, specifying safety measures accordingly.
- Laser Classification: Ranges from Class 1 (safe under all conditions) to Class 4 (high power, hazardous to eyes and skin).
- Control Measures: Include engineering controls (interlocks, beam enclosures), administrative controls (training, signage), and personal protective equipment (PPE).
Example: A high-power laser used in a directed energy weapon system would typically be Class 4. Compliance requires controlled access areas, beam path enclosures, and mandatory use of laser safety goggles by personnel.
Electromagnetic Emissions and Interference
Directed energy devices may emit electromagnetic radiation beyond the laser beam itself, such as from power supplies or control electronics. Regulatory bodies set limits to prevent harmful interference with other equipment.
- Standards: Include limits on electromagnetic compatibility (EMC) and radio frequency interference (RFI).
- Testing: Systems must undergo EMC testing to verify compliance.
Example: A directed energy system installed on a naval vessel must pass EMC tests to ensure it does not disrupt the ship’s radar or communication systems.
Environmental and Occupational Safety Regulations
Thermal management and hazardous materials used in directed energy systems fall under environmental and occupational safety rules.
- Thermal Emissions: Regulations may limit heat dissipation to prevent environmental damage or hazards.
- Hazardous Materials: Handling of laser dyes, cooling fluids, or other chemicals requires adherence to material safety data sheets (MSDS) and disposal protocols.
- Workplace Safety: OSHA or equivalent agencies mandate training, hazard assessments, and emergency procedures.
Example: A facility operating high-power lasers must implement ventilation systems to manage fumes from laser ablation processes and train staff on chemical handling.
Export Controls and Military Use Restrictions
Directed energy technologies often fall under export control regimes due to their strategic nature.
- International Traffic in Arms Regulations (ITAR) and similar frameworks restrict transfer of technology to foreign entities.
- Licensing Requirements: Export or transfer typically requires government authorization.
Example: A company developing adaptive optics for directed energy weapons must secure export licenses before sharing designs with overseas partners.
Mind Map: Regulatory Standards for Directed Energy Systems
Integrating Compliance into System Design
Regulatory compliance is not an afterthought; it must be integrated from the earliest design stages. This includes selecting components that meet safety standards, designing control systems to enforce operational limits, and planning for testing and certification.
Example: Incorporating interlock systems that disable the laser if safety barriers are breached ensures compliance with laser safety regulations and protects personnel.
Documentation and Record-Keeping
Maintaining thorough documentation is a regulatory requirement and a practical necessity. This includes:
- Safety manuals and operating procedures.
- Training records.
- Test reports and certification documents.
- Incident logs.
Example: During an audit, a directed energy facility must produce records demonstrating regular calibration of wavefront sensors and adherence to safety protocols.
Summary
Regulatory standards for directed energy systems cover multiple areas, each with specific requirements. Successful compliance demands a clear understanding of these standards, proactive design choices, rigorous testing, and comprehensive documentation. Integrating these elements ensures not only legal operation but also system reliability and personnel safety.
9.3 Environmental and Operational Compliance
Environmental and operational compliance in directed energy systems is about ensuring that the system operates within legal, safety, and environmental boundaries. This involves meeting regulations that govern emissions, electromagnetic interference, hazardous materials, and operational protocols. Compliance is not just a bureaucratic hurdle; it directly impacts system reliability, safety, and public acceptance.
Key Areas of Environmental and Operational Compliance
- Emission Controls: Directed energy systems, especially high-power lasers, can produce unintended emissions such as stray laser radiation, electromagnetic interference, and heat. Regulations often limit these emissions to protect personnel and nearby equipment.
- Material Handling and Disposal: Components may contain hazardous materials like certain optical coatings or cooling fluids. Proper handling, storage, and disposal are required to prevent environmental contamination.
- Operational Protocols: Procedures must be in place to control access, monitor system status, and respond to emergencies. These protocols reduce risks associated with accidental exposure or system malfunction.
- Environmental Impact: Noise, thermal pollution, and energy consumption are monitored to minimize the system’s footprint.
Mind Map: Environmental and Operational Compliance Overview
Emission Controls
Laser safety standards define maximum permissible exposure (MPE) levels to prevent eye and skin damage. Systems must include beam enclosures, interlocks, and warning signs to comply. Electromagnetic emissions from power supplies or control electronics can interfere with nearby devices; shielding and filtering are common mitigation techniques.
Example: A directed energy lab installed interlock systems that immediately shut down the laser if a door to the beam path enclosure is opened. This simple measure ensured compliance with laser safety regulations and prevented accidental exposure.
Material Handling and Disposal
Optical elements may use coatings containing heavy metals or other hazardous substances. Cooling systems might use fluids that require special disposal methods. Compliance demands documented procedures for handling these materials and training for personnel.
Example: A facility switched to an environmentally friendly coolant with a documented disposal plan, reducing regulatory complexity and environmental risk.
Operational Protocols
Access control limits who can operate or be near the system. Emergency shutdown procedures must be clear and tested regularly. Maintenance schedules ensure that components prone to degradation do not cause safety or compliance issues.
Example: A directed energy installation implemented badge-controlled access and a mandatory checklist before laser activation, improving operational discipline and compliance.
Environmental Impact
Noise from cooling systems or mechanical components can be regulated, especially in urban or sensitive areas. Thermal emissions must be managed to avoid local heating that could affect the environment or system performance. Energy consumption is increasingly scrutinized; efficient designs help meet operational compliance.
Example: Engineers redesigned a cooling system to reduce noise below local ordinance limits, allowing the facility to operate without special exemptions.
Mind Map: Compliance Implementation Steps
Practical Considerations
- Early engagement with regulatory bodies can clarify requirements and avoid costly redesigns.
- Training staff on compliance procedures reduces human error.
- Keeping detailed records supports audits and continuous improvement.
In summary, environmental and operational compliance is a structured approach to managing the risks and impacts of directed energy systems. It requires technical solutions, procedural controls, and ongoing vigilance. Integrating compliance into system design and operation ensures safer, more reliable, and legally sound directed energy applications.
9.4 Best Practices for Safe System Design and Operation
Safety in directed energy systems is not just about avoiding accidents; it’s about designing and operating systems that anticipate risks and minimize them systematically. This section covers practical approaches to ensure safety without compromising system performance.
Key Principles of Safe System Design
- Risk Identification: Understand all potential hazards related to laser emissions, electrical systems, thermal loads, and mechanical components.
- Fail-Safe Design: Systems should default to a safe state in case of malfunction.
- Redundancy: Critical safety functions should have backups.
- Interlocks: Physical or software mechanisms that prevent unsafe operation.
- User Training and Procedures: Operators must know how to handle the system safely.
Mind Map: Core Elements of Safe System Design
Designing for Laser Safety
Laser beams can cause eye and skin injuries, and high-power systems can ignite materials. Design considerations include:
- Beam Enclosures: Enclose beam paths wherever possible to prevent accidental exposure.
- Beam Stops and Dumps: Use materials that safely absorb or dissipate laser energy.
- Warning Systems: Visual and audible alarms indicate when the laser is active.
- Access Control: Limit entry to laser areas through locks and controlled access.
Example: In a lab setting, a high-power laser system is enclosed in a cabinet with interlocked doors. Opening any door immediately cuts power to the laser. Warning lights outside the cabinet indicate laser status.
Electrical and Thermal Safety
Directed energy systems often involve high voltages and significant heat generation.
- Electrical Safety: Use proper grounding, circuit breakers, and insulated wiring. Regular inspections prevent degradation.
- Thermal Management: Design cooling systems with fail-safes to prevent overheating. Include temperature sensors linked to automatic shutdowns.
Example: A cooling system failure sensor triggers an emergency shutdown if coolant flow drops below a threshold, preventing thermal damage and fire risk.
Interlocks and Control Logic
Interlocks are essential to prevent unsafe states.
- Physical Interlocks: Switches that detect if a protective cover is open.
- Software Interlocks: Control software that prevents laser activation unless all safety conditions are met.
- Sequence Controls: Ensure operations happen in a safe order.
Example: Before enabling the laser, the control system checks that all interlocks are engaged and the beam path is clear. If any condition fails, the system refuses to power on.
Operational Best Practices
- Pre-Use Checks: Verify interlocks, warning systems, and cooling before operation.
- Clear Signage: Post laser hazard signs and emergency procedures visibly.
- Personal Protective Equipment (PPE): Use appropriate eyewear and protective clothing.
- Incident Reporting: Establish a clear process for reporting and analyzing safety incidents.
Example: Operators perform a checklist before each run, confirming all safety systems are functional and PPE is worn.
Mind Map: Operational Safety Practices
Example Scenario: Safe Shutdown Procedure
Imagine a directed energy system in a testing facility. The operator notices an unusual temperature rise on a sensor. Following protocol:
- The operator immediately initiates an emergency shutdown via the control panel.
- The system cuts laser power and activates cooling fans at maximum.
- An alarm sounds, alerting nearby personnel.
- The operator documents the event and notifies maintenance.
This sequence prevents damage and ensures personnel safety.
In summary, safety in directed energy systems depends on thoughtful design, reliable interlocks, thorough training, and clear operational procedures. Integrating these elements creates a robust safety culture that protects people and equipment alike.
9.5 Practical Example: Implementing Safety Protocols in a Directed Energy Facility
Implementing safety protocols in a directed energy facility requires a systematic approach that addresses hazards unique to high-power laser systems and their operational environment. This example outlines key steps, considerations, and practical measures to ensure personnel safety, equipment protection, and regulatory compliance.
Step 1: Hazard Identification and Risk Assessment
Begin by cataloging all potential hazards related to the directed energy system. These include laser radiation exposure, electrical risks, thermal hazards, and mechanical dangers from moving parts.
Hazard Identification Mind Map
Each hazard should be evaluated for likelihood and potential impact, guiding the prioritization of safety measures.
Step 2: Establishing Controlled Areas and Access Restrictions
Define zones based on laser classification and risk levels. For example, areas with Class 4 lasers require strict access control.
- Use physical barriers and interlocks to prevent unauthorized entry.
- Post clear signage indicating laser hazard levels.
- Implement a badge or keycard system for personnel clearance.
Step 3: Engineering Controls
These are the first line of defense and include:
- Beam Enclosures: Fully enclose beam paths where feasible to prevent accidental exposure.
- Interlocks: Install door interlocks that disable the laser if an enclosure is breached.
- Emergency Shutoffs: Place easily accessible emergency stop buttons near the laser and at entry points.
- Beam Dumps: Use non-reflective, heat-resistant materials to safely absorb stray beams.
Step 4: Administrative Controls
Administrative measures complement engineering controls:
- Develop and enforce standard operating procedures (SOPs) for laser operation, maintenance, and emergency response.
- Conduct regular safety training tailored to the facility’s specific equipment and hazards.
- Schedule routine inspections and maintenance to verify the integrity of safety systems.
Step 5: Personal Protective Equipment (PPE)
Select PPE based on the laser wavelength and power:
- Laser safety goggles with appropriate optical density.
- Protective clothing resistant to thermal burns.
- Hearing protection if noise levels exceed safe thresholds.
Step 6: Monitoring and Incident Response
Implement continuous monitoring systems:
- Use beam presence detectors and warning lights.
- Maintain logs of laser usage and safety checks.
- Establish clear protocols for incident reporting and investigation.
Practical Example Scenario
Consider a directed energy facility operating a 10 kW fiber laser at 1.06 µm wavelength (near-infrared). Here’s how safety protocols might be implemented:
-
Hazard Identification: The primary risk is eye and skin damage from direct or reflected beams. Secondary risks include electrical shock from power supplies and heat from optics.
-
Controlled Areas: The laser room is designated a high-risk zone with restricted access. Entry requires laser safety training certification.
-
Engineering Controls: The beam path is enclosed with metal tubing and beam dumps at termination points. Door interlocks shut down the laser if opened.
-
Administrative Controls: Operators follow a checklist before laser activation, including verifying enclosure integrity and PPE use.
-
PPE: Operators wear laser safety goggles rated for 1.06 µm with optical density 7+, and heat-resistant gloves during maintenance.
-
Monitoring: A warning light outside the laser room indicates when the laser is active. Incident logs are reviewed monthly.
Safety Protocol Mind Map
Summary
Effective safety protocol implementation in directed energy facilities relies on layered defenses: identifying hazards, controlling access, engineering safeguards, administrative oversight, appropriate PPE, and continuous monitoring. Each layer reduces risk and ensures safe operation without impeding system performance. The practical example demonstrates how these elements come together in a real-world setting, providing a clear framework for facility managers and operators.
10. Appendices and Reference Materials
10.1 Glossary of Key Terms and Acronyms
This glossary covers essential terms and acronyms used throughout the book. Each entry includes a concise definition and, where helpful, a simple example or mind map to clarify relationships.
Adaptive Optics (AO) A technology that adjusts optical elements in real time to correct wavefront distortions caused by atmospheric turbulence or system imperfections.
- Example: A deformable mirror changes shape to compensate for atmospheric distortion, improving laser beam focus.
Beam Control Techniques and systems used to direct, stabilize, and shape a laser beam to maintain desired performance.
- Mind Map:
Beam Control ├─ Steering │ ├─ Mechanical (gimbals, mirrors) │ └─ Electronic (phased arrays) ├─ Stabilization │ ├─ Feedback loops │ └─ Vibration damping └─ Shaping ├─ Aperture control └─ Wavefront correction
Deformable Mirror (DM) An optical mirror with a surface that can be precisely shaped by actuators to correct wavefront errors.
- Example: In a high-power laser, a DM compensates for thermal lensing effects by adjusting its surface shape.
Feedback Loop A control system mechanism where output is measured and used to adjust inputs to maintain system stability or performance.
- Example: A wavefront sensor detects distortion, and the control system adjusts the deformable mirror accordingly.
Wavefront A surface over which an optical wave has a constant phase. Ideally flat or spherical for perfect beam quality.
- Mind Map:
Wavefront ├─ Ideal Shapes │ ├─ Plane │ └─ Spherical ├─ Distortions │ ├─ Aberrations │ └─ Turbulence effects └─ Measurement ├─ Shack-Hartmann sensor └─ Interferometry
Thermal Lensing A phenomenon where heat-induced refractive index changes in optical materials cause the beam to focus or defocus, acting like a lens.
- Example: A laser crystal heats unevenly, causing the beam to spread out unless corrected.
Scintillation Rapid fluctuations in beam intensity caused by atmospheric turbulence.
- Example: The twinkling of stars is a natural example of scintillation affecting light propagation.
Wavefront Sensor (WFS) A device that measures the shape of the wavefront to detect distortions.
- Example: A Shack-Hartmann sensor uses an array of lenslets to sample the wavefront slope.
Spatial Light Modulator (SLM) An optical device that modulates the phase or amplitude of light spatially, often used in adaptive optics.
- Example: An SLM can create dynamic holograms to shape laser beams.
Beam Wander The slow, random movement of a laser beam’s centroid caused by atmospheric turbulence.
- Mind Map:
Beam Wander ├─ Causes │ ├─ Atmospheric turbulence │ └─ Mechanical vibrations ├─ Effects │ ├─ Targeting errors │ └─ Reduced beam intensity on target └─ Mitigation ├─ Beam steering └─ Feedback control
Closed-Loop Control A control system that continuously monitors output and adjusts inputs to reduce error.
- Example: Using wavefront sensor data to drive deformable mirror actuators in real time.
Open-Loop Control Control without feedback; commands are sent without measuring the output.
- Example: Pre-programmed mirror adjustments without wavefront sensing.
Actuator A device that moves or controls a mechanism or system, such as deforming a mirror surface.
- Example: Piezoelectric actuators deform mirrors by expanding or contracting.
Strehl Ratio A measure of optical quality comparing the peak intensity of an aberrated beam to an ideal one.
- Example: A Strehl ratio of 0.9 means the beam quality is 90% of the ideal.
Thermal Management Methods and systems used to control temperature and heat flow to maintain optical performance.
- Example: Liquid cooling channels in laser gain media to prevent thermal lensing.
Target Acquisition The process of locating and identifying a target for directed energy engagement.
- Example: Using infrared sensors to detect a moving vehicle.
Beam Steering Adjusting the direction of a laser beam to aim at a target or compensate for disturbances.
- Mind Map:
Beam Steering ├─ Mechanical │ ├─ Gimbals │ └─ Fast steering mirrors ├─ Electronic │ └─ Phased arrays └─ Control ├─ Feedback └─ Predictive algorithms
Shack-Hartmann Sensor A wavefront sensor that divides incoming light into an array of spots to measure local wavefront slopes.
- Example: Used in adaptive optics to detect aberrations caused by atmospheric turbulence.
Phased Array An array of emitters or antennas where the relative phase of each element is controlled to steer the beam electronically.
- Example: Electronically steering a laser beam without moving parts.
Scattering The deflection of light by particles or irregularities in the medium.
- Example: Dust or aerosols causing beam attenuation and distortion.
Aberration Deviation of an optical wavefront from the ideal shape, causing image or beam quality degradation.
- Example: Spherical aberration where rays focus at different points.
Signal-to-Noise Ratio (SNR) A measure comparing the level of a desired signal to the background noise.
- Example: Higher SNR in wavefront sensor data improves correction accuracy.
Vibration Damping Techniques to reduce mechanical vibrations that can degrade beam stability.
- Example: Using elastomer mounts to isolate optical tables.
Line-of-Sight (LOS) A direct path between the laser source and the target without obstructions.
- Example: Atmospheric conditions affecting LOS clarity.
Calibration The process of adjusting system parameters to ensure accurate measurements and control.
- Example: Aligning wavefront sensor reference spots before operation.
Thermal Simulation Computational modeling of heat flow and temperature distribution in optical systems.
- Example: Predicting thermal lensing effects in laser gain media.
This glossary is designed to clarify the vocabulary needed to understand beam control and adaptive optics in directed energy systems. The included mind maps visualize relationships, helping to organize concepts logically. Examples ground abstract terms in practical scenarios, making the material more accessible.
10.2 Mathematical Foundations for Beam Control and Adaptive Optics
Beam control and adaptive optics rely heavily on mathematical concepts to describe, analyze, and correct optical wavefronts and beam propagation. This section covers the core mathematical tools and principles essential for understanding and implementing these systems.
Wave Optics and Beam Propagation
At the heart of beam control is the wave nature of light. The electric field of a beam can be described as a complex amplitude ( E(x,y,z) ), where (x) and (y) are transverse coordinates and (z) is the propagation direction.
The paraxial wave equation approximates beam propagation for small angles relative to the optical axis:
\[ \nabla_\perp^2 E - 2ik \frac{\partial E}{\partial z} = 0 \]
where \( \nabla_\perp^2 \) is the transverse Laplacian and \( k = 2\pi/\lambda \) is the wavenumber.
This equation governs Gaussian beam propagation, diffraction, and focusing.
Example: Calculating the beam radius \( w(z) \) along propagation:
\[ w(z) = w_0 \sqrt{1 + \left( \frac{z}{z_R} \right)^2 } \]
where \( w_0 \) is the beam waist radius and \( z_R = \pi w_0^2 / \lambda \) is the Rayleigh range.
Fourier Optics
Fourier transforms describe how lenses and apertures affect beams. The far-field diffraction pattern is the Fourier transform of the aperture function.
Key relation:
\[ U(f_x, f_y) = \mathcal{F}{u(x,y)} = \iint u(x,y) e^{-i 2 \pi (f_x x + f_y y)} dx dy \]
where \( u(x,y) \) is the complex field at the aperture and \( U(f_x, f_y) \) is the far-field distribution.
Example: A circular aperture produces an Airy disk pattern, whose intensity is given by:
\[ I(\theta) = I_0 \left( \frac{2 J_1(k a \sin \theta)}{k a \sin \theta} \right)^2 \]
where \( J_1 \) is the first-order Bessel function, \( a \) is aperture radius, and \( \theta \) is the angle from the optical axis.
Wavefront Representation and Decomposition
Wavefront distortions are often expressed as phase variations \( \phi(x,y) \) over the aperture.
A common approach is to decompose \( \phi \) into orthogonal basis functions such as Zernike polynomials:
\[ \phi(\rho, \theta) = \sum_{n=0}^\infty \sum_{m=-n}^n a_n^m Z_n^m(\rho, \theta) \]
where \( \rho \) and \( \theta \) are normalized polar coordinates, and \( a_n^m \) are coefficients.
Zernike polynomials correspond to common aberrations like tilt, defocus, astigmatism, and coma.
Example: Correcting tilt aberration involves removing the first-order Zernike terms, which correspond to beam pointing errors.
Control Theory Basics
Beam control systems use feedback loops to maintain beam stability and correct distortions.
The system can be modeled as:
\[ Y(s) = G(s) U(s) \]
where \( Y(s) \) is the output (e.g., corrected wavefront), \( U(s) \) is the input (e.g., actuator commands), and \( G(s) \) is the transfer function.
Stability is analyzed using methods like Bode plots and Nyquist criteria.
Example: A proportional-integral-derivative (PID) controller adjusts actuator commands based on wavefront sensor feedback to minimize error.
Wavefront Sensing Mathematics
Wavefront sensors measure phase distortions indirectly, often through intensity variations.
Shack-Hartmann sensor: Measures local wavefront slopes by analyzing spot displacements:
\[ \Delta x_i = f \frac{\partial \phi}{\partial x} (x_i, y_i), \quad \Delta y_i = f \frac{\partial \phi}{\partial y} (x_i, y_i) \]
where \( f \) is the lenslet focal length and \( (x_i, y_i) \) are lenslet positions.
Reconstructing \( \phi \) from slopes involves solving a Poisson equation or using least squares.
Example: Using discrete slope measurements to reconstruct the wavefront phase map for correction.
Thermal Effects and Deformation Modeling
Thermal gradients cause refractive index changes and mechanical deformations.
The optical path difference (OPD) due to thermal effects is:
\[ \mathrm{OPD}(x,y) = \int (n(T(x,y,z)) - n_0) dz + \frac{2 \pi}{\lambda} \delta L(x,y) \]
where \( n(T) \) is temperature-dependent refractive index and \( \delta L \) is physical deformation.
Finite element methods (FEM) model these effects numerically.
Example: Calculating OPD in a laser gain medium under thermal load to predict beam distortion.
Mind Maps
Mind Map 1: Core Mathematical Concepts
Mind Map 2: Wavefront Correction Workflow
Additional Examples
Example 1: Calculating Zernike Coefficients
Given a measured wavefront phase map \( \phi(x,y) \), coefficients \( a_n^m \) are computed by projecting \( \phi \) onto each Zernike polynomial:
\[ a_n^m = \frac{\iint \phi(\rho, \theta) Z_n^m(\rho, \theta) \rho d\rho d\theta}{\iint [Z_n^m(\rho, \theta)]^2 \rho d\rho d\theta} \]
This process isolates specific aberrations for targeted correction.
Example 2: Stability Margin Calculation
For a beam control feedback loop with transfer function \( G(s)H(s) \), the gain margin and phase margin are found from the Bode plot to ensure the system does not oscillate.
If the phase crosses -180° at frequency \( \omega_c \), the gain margin is:
\[ GM = \frac{1}{|G(j\omega_c)H(j\omega_c)|} \]
A gain margin greater than 1 indicates stability.
This section provides the mathematical backbone needed to understand and implement beam control and adaptive optics. Each concept builds on the last, forming a toolkit for diagnosing and correcting beam distortions with precision.
10.3 List of Commonly Used Components and Vendors
In directed energy systems, the choice of components directly affects performance, reliability, and maintainability. This section provides an overview of key components commonly used in beam control and adaptive optics, along with examples of vendors known for supplying these parts. The goal is to offer a practical guide to the hardware landscape, helping you identify what you might need and where to start looking.
Core Components Mind Map
Wavefront Sensors
Wavefront sensors measure distortions in the laser beam’s wavefront, critical for adaptive optics corrections.
- Shack-Hartmann Sensors: The most common type, consisting of an array of microlenses focusing light onto a sensor. Vendors like Thorlabs and Imagine Optic offer modular systems.
- Curvature Sensors: Less common but useful in some high-speed applications; suppliers include OptoSigma.
- Pyramid Sensors: More specialized, used in research environments; custom solutions often sourced from academic spin-offs or specialized optics firms.
Example: A mid-power laser system might use a Shack-Hartmann sensor from Imagine Optic for real-time wavefront correction, balancing cost and performance.
Deformable Mirrors (DMs)
DMs physically adjust the shape of a reflective surface to correct wavefront errors.
- MEMS-based DMs: Compact and fast, suitable for moderate actuator counts. Companies like Boston Micromachines and Iris AO are leading vendors.
- Piezoelectric DMs: Offer high stroke and precision, used in high-power systems. Vendors include ALPAO and OKO Technologies.
- Magnetic DMs: Larger stroke and actuator count, less common but available from specialized suppliers.
Example: For a high-energy laser, a piezoelectric DM from ALPAO might be chosen to handle larger thermal distortions.
Beam Steering Devices
These components adjust the beam’s direction to maintain targeting accuracy.
- Fast Steering Mirrors (FSMs): Small mirrors mounted on piezo or voice coil actuators; vendors include Physik Instrumente (PI) and Newport.
- Galvanometer Scanners: Use rotating mirrors for larger angular deflections; common suppliers are Cambridge Technology and Thorlabs.
- Acousto-Optic Deflectors (AODs): Use sound waves to diffract beams rapidly; vendors include Gooch & Housego.
Example: A tracking system might integrate a PI FSM for fine adjustments combined with a Cambridge Technology galvo for coarse steering.
Laser Sources
The heart of any directed energy system, laser sources vary by application.
- Fiber Lasers: Known for beam quality and robustness; suppliers include IPG Photonics and nLIGHT.
- Solid-State Lasers: Versatile and powerful; vendors like Coherent and Spectra-Physics provide a range.
- Diode Lasers: Compact and efficient, often used as pump sources; companies include Osram and Lumentum.
Example: A system requiring high beam quality and moderate power might use an IPG fiber laser combined with adaptive optics for beam shaping.
Thermal Management Components
Managing heat is essential to maintain beam stability and component longevity.
- Heat Sinks: Passive cooling elements, often custom-machined aluminum or copper; suppliers include Wakefield-Vette.
- Thermoelectric Coolers (TECs): Solid-state devices for precise temperature control; vendors include Laird Thermal Systems.
- Liquid Cooling Systems: For high-power lasers, custom loops or commercial chillers from Lytron or Koolance.
Example: A high-power laser module might be mounted on a copper heat sink with an integrated TEC and liquid cooling loop to maintain stable operating temperature.
Control Electronics
These components process sensor data and drive actuators in real time.
- Real-Time Controllers: Dedicated hardware for low-latency control; vendors include National Instruments and dSPACE.
- FPGA Boards: For custom, high-speed processing; suppliers like Xilinx and Altera (Intel) provide development kits.
- DAC/ADC Modules: Interface analog signals with digital controllers; available from Measurement Computing and Analog Devices.
Example: An adaptive optics system might use a National Instruments real-time controller paired with FPGA-based wavefront processing for rapid corrections.
Summary Table of Components and Vendors
| Component Type | Example Vendors | Typical Use Case |
|---|---|---|
| Wavefront Sensors | Thorlabs, Imagine Optic | Wavefront measurement |
| Deformable Mirrors | Boston Micromachines, ALPAO | Wavefront correction |
| Beam Steering Devices | Physik Instrumente, Cambridge Tech | Beam direction control |
| Laser Sources | IPG Photonics, Coherent | Beam generation |
| Thermal Management | Wakefield-Vette, Laird Thermal | Heat dissipation and temperature control |
| Control Electronics | National Instruments, Xilinx | Signal processing and actuator control |
Each component choice depends on system requirements such as power level, speed, precision, and environmental conditions. Vendors listed here are examples with broad industry presence but not an exhaustive list.
This overview should help you identify the types of components involved in beam control and adaptive optics systems and provide a starting point for sourcing them. The examples illustrate how these parts fit into practical setups, emphasizing the balance between performance and application needs.
10.4 Sample Data Sheets and Calibration Templates
In directed energy systems, precise data collection and calibration are essential for maintaining beam quality and system performance. This section provides practical templates and examples for data sheets and calibration procedures, designed to help engineers and technicians document measurements and adjustments systematically.
Sample Data Sheet: Wavefront Sensor Calibration
| Parameter | Description | Units | Measured Value | Notes |
|---|---|---|---|---|
| Sensor Model | Manufacturer and model number | N/A | Shack-Hartmann X200 | Verify firmware version |
| Calibration Date | Date of calibration | YYYY-MM-DD | 2024-06-15 | |
| Ambient Temperature | Temperature during calibration | °C | 22.5 | Stable environment preferred |
| Reference Wavefront RMS | Root mean square error of reference | nm | 15 | Baseline for comparison |
| Actuator Voltage Range | Voltage range for deformable mirror | Volts | 0-150 | Confirm linear response |
| Calibration Target | Type of target used | N/A | Flat mirror | Surface flatness < λ/20 |
| Measurement Repeatability | Standard deviation over 5 runs | nm | 2.3 | Indicates sensor stability |
Calibration Template: Deformable Mirror (DM) Response
| Step | Input Voltage (V) | Expected Surface Deformation (nm) | Measured Deformation (nm) | Deviation (nm) | Corrective Action |
|---|---|---|---|---|---|
| 1 | 10 | 50 | 48 | -2 | None |
| 2 | 30 | 150 | 155 | +5 | Adjust voltage calibration |
| 3 | 60 | 300 | 295 | -5 | Monitor for drift |
| 4 | 90 | 450 | 460 | +10 | Check actuator connections |
| 5 | 120 | 600 | 590 | -10 | Recalibrate sensor offset |
Mind Map: Beam Control Calibration Workflow
Practical Example: Laser Beam Pointing Stability Data Sheet
| Parameter | Description | Units | Value | Comments |
|---|---|---|---|---|
| Measurement Date | Date of data collection | YYYY-MM-DD | 2024-06-10 | |
| Ambient Conditions | Temperature and humidity | °C / %RH | 21 / 45 | Stable lab environment |
| Beam Wavelength | Operating wavelength | nm | 1064 | Nd:YAG laser |
| Pointing Stability RMS | Root mean square of beam jitter | µrad | 0.15 | Over 10-minute interval |
| Measurement Duration | Time over which data was collected | seconds | 600 | |
| Sensor Used | Device measuring beam position | N/A | Position Sensitive Detector | |
| Control Loop Bandwidth | Frequency response of control loop | Hz | 100 | Bandwidth affects stability |
| Notes | Observations or anomalies | N/A | Minor drift at 300s | Investigate thermal effects |
Mind Map: Thermal Calibration and Monitoring
Example: Cooling System Performance Data Sheet
| Parameter | Description | Units | Measured Value | Notes |
|---|---|---|---|---|
| Cooling Method | Type of cooling used | N/A | Liquid cooling | Water-glycol mixture |
| Flow Rate | Coolant flow rate | L/min | 5.0 | Stable flow required |
| Inlet Temperature | Temperature of coolant entering system | °C | 18.0 | |
| Outlet Temperature | Temperature of coolant leaving system | °C | 25.5 | Indicates heat load |
| Component Temperature | Temperature of critical optic | °C | 30.2 | Should remain below 35°C |
| Thermal Drift Observed | Change in beam pointing due to temperature | µrad | 0.05 | Minimal drift acceptable |
| Maintenance Date | Last maintenance performed | YYYY-MM-DD | 2024-05-20 |
These templates and mind maps serve as starting points. They encourage consistent data collection and clear communication among team members. Adjust fields and parameters to fit specific system requirements or operational contexts. The goal is to make calibration and data logging straightforward, repeatable, and informative.
10.5 Practical Example: Step-by-Step Guide to Wavefront Sensor Calibration
Wavefront sensors (WFS) are essential in adaptive optics systems to measure distortions in the optical wavefront. Proper calibration ensures accurate measurements, which directly impact beam quality and system performance. This guide walks through the calibration process with clear steps, examples, and mind maps to clarify the workflow.
Step 1: Understand Your Wavefront Sensor Type
Before calibration, identify the type of wavefront sensor you are working with. Common types include Shack-Hartmann, curvature, and pyramid sensors. Each type has unique calibration needs.
- Shack-Hartmann: Uses lenslet arrays to sample the wavefront slope.
- Curvature: Measures wavefront curvature by intensity differences.
- Pyramid: Splits the beam into multiple pupil images for phase reconstruction.
Example: For a Shack-Hartmann sensor, calibration focuses on mapping lenslet spots to known reference positions.
Step 2: Prepare the Calibration Setup
Ensure the optical bench or system is stable and free from vibrations. Use a reference flat wavefront source, typically a collimated laser beam with minimal aberrations.
- Align the beam to the sensor’s optical axis.
- Confirm the sensor’s camera or detector is properly connected and configured.
Example: Use a He-Ne laser with a spatial filter to produce a clean Gaussian beam.
Step 3: Acquire Reference Data
Capture the sensor output with the flat wavefront source. This reference frame represents the zero-aberration state.
- Record multiple frames to average out noise.
- Store this as the baseline for subsequent measurements.
Example: Capture 100 frames and compute the average centroid positions for each lenslet.
Step 4: Determine Lenslet Spot Positions
Identify the centroid of each lenslet spot in the reference frame. This step creates a map of expected spot locations.
- Use image processing algorithms (e.g., center of mass calculation).
- Verify spot detection accuracy by visual inspection.
Example: In MATLAB or Python, use thresholding and centroid functions to locate spots.
Step 5: Calculate Calibration Matrix
The calibration matrix relates measured spot displacements to wavefront slopes or phase changes.
- Introduce known wavefront perturbations using a deformable mirror or phase plate.
- Measure the sensor response to each perturbation.
- Use these measurements to build the influence matrix.
Example: Apply a known tilt to the wavefront and record spot shifts to calibrate slope sensitivity.
Step 6: Validate Calibration
Test the calibration by applying known aberrations and comparing sensor output to expected results.
- Use Zernike polynomials to generate standard aberrations.
- Check if reconstructed wavefront matches the input.
Example: Introduce defocus and verify that the sensor correctly measures the corresponding wavefront shape.
Step 7: Implement Real-Time Corrections
Integrate the calibration data into the adaptive optics control loop.
- Use the calibration matrix to convert sensor readings into actuator commands.
- Monitor system performance and recalibrate periodically.
Example: During beam steering, the sensor detects tilt; calibration ensures actuators compensate accurately.
Mind Maps
Wavefront Sensor Calibration Workflow
Example: Shack-Hartmann Sensor Calibration
Additional Notes
- Calibration frequency depends on system stability and environmental conditions.
- Temperature changes can affect sensor and optics alignment; consider thermal compensation.
- Noise reduction during centroid calculation improves calibration accuracy.
This step-by-step guide aims to provide a clear path to calibrate wavefront sensors effectively. The examples illustrate practical actions, and the mind maps help visualize the process flow. Calibration is fundamental to achieving precise beam control and adaptive optics performance.