Practical Power Electronics For Electric Vehicles And Charging Infrastructure
1. Introduction to Power Electronics in Electric Vehicles
1.1 Overview of Power Electronics in EVs
Power electronics form the backbone of electric vehicles (EVs), enabling efficient conversion, control, and management of electrical energy between the battery, motor, and charging infrastructure. Understanding their role is essential for electrical engineering students, EV technicians, and power engineers working in the electric transportation field.
What is Power Electronics?
Power electronics is the application of solid-state electronics to control and convert electric power efficiently. In EVs, this involves managing high currents and voltages to drive motors, charge batteries, and ensure system safety.
Key Roles of Power Electronics in EVs
- Energy Conversion: Transforming DC battery power into AC for motors and vice versa during regenerative braking.
- Voltage Regulation: Maintaining stable voltage levels for various vehicle subsystems.
- Power Control: Adjusting motor speed and torque through precise control of electrical signals.
- Battery Charging: Managing onboard and fast charging processes.
Mind Map: Core Functions of Power Electronics in EVs
Practical Example: Simple Energy Flow in an EV
Consider a scenario where the EV is accelerating:
- The battery provides DC power.
- A DC-DC converter steps down voltage to supply auxiliary systems.
- The inverter converts DC to AC to drive the traction motor.
- Power electronics control the motor speed via PWM signals.
When braking:
- The motor acts as a generator.
- The inverter converts AC back to DC.
- The battery is recharged through the power electronics system (regenerative braking).
Mind Map: Power Electronics Components in an EV
Best Practice: Modular Design
Designing power electronics modules in a modular fashion simplifies maintenance and upgrades. For example, separating the inverter module from the DC-DC converter allows independent testing and replacement.
Example: Understanding an Inverter Module
An inverter module typically includes:
- Power semiconductor devices (IGBTs or MOSFETs)
- Gate driver circuits
- Control logic for PWM
- Cooling system
By studying a basic inverter schematic, students can grasp how DC battery voltage is converted into a controlled AC waveform to drive the motor.
Summary
Power electronics in EVs are critical for efficient energy management and vehicle performance. They encompass a range of components and functions, from energy conversion to safety systems. Understanding these fundamentals with practical examples and mind maps lays a solid foundation for deeper study and application.
1.2 Key Components and Their Functions
Power electronics in electric vehicles (EVs) rely on a variety of components that work together to efficiently convert, control, and manage electrical energy. Understanding these key components and their functions is essential for designing, troubleshooting, and optimizing EV power systems.
Major Components Overview
Power Semiconductor Devices
These are the heart of power electronics, responsible for switching and controlling electrical power flow.
-
MOSFETs (Metal-Oxide-Semiconductor Field-Effect Transistors):
- Used primarily in low to medium voltage applications (up to ~250V).
- Fast switching speeds, making them ideal for DC-DC converters.
- Example: In a 12V auxiliary power converter, MOSFETs efficiently regulate voltage to power vehicle electronics.
-
IGBTs (Insulated Gate Bipolar Transistors):
- Used in high voltage and high current applications, such as traction inverters.
- Combine the advantages of MOSFETs and bipolar transistors.
- Example: In a 400V motor inverter, IGBTs switch large currents to drive the traction motor.
-
Diodes:
- Provide unidirectional current flow and freewheeling paths.
- Schottky and fast recovery diodes are common for efficiency.
- Example: In a buck converter, a diode provides a path for inductor current when the switch is off.
Converters and Inverters
These convert electrical energy between different forms and voltage levels.
-
DC-DC Converters:
- Convert voltage levels (e.g., from high-voltage battery pack to 12V system).
- Types include buck, boost, and buck-boost converters.
- Example: A buck converter steps down 400V battery voltage to 12V for vehicle accessories.
-
Inverters:
- Convert DC from the battery to AC for driving the traction motor.
- Use PWM (Pulse Width Modulation) for speed and torque control.
- Example: A three-phase inverter drives the EV motor by generating variable frequency AC.
Passive Components
These components support energy storage, filtering, and magnetic coupling.
-
Inductors:
- Store energy in magnetic fields; smooth current ripple.
- Example: Inductors in DC-DC converters reduce current ripple, improving efficiency.
-
Capacitors:
- Store energy in electric fields; filter voltage ripple.
- Example: Bulk capacitors stabilize DC bus voltage in an inverter.
-
Transformers:
- Provide galvanic isolation and voltage transformation.
- Example: In onboard chargers, transformers step down AC mains voltage for battery charging.
Control Units
Responsible for managing power electronics operation through control algorithms.
- Microcontrollers and DSPs:
- Execute control algorithms such as PWM generation, fault detection, and communication.
- Example: A DSP running Field Oriented Control (FOC) algorithm for precise motor control.
Sensors
Provide real-time data for control and safety.
-
Current Sensors:
- Measure current flow for control and protection.
- Example: Hall-effect sensors monitor motor phase currents.
-
Voltage Sensors:
- Monitor voltage levels to ensure safe operation.
- Example: Voltage dividers measure battery pack voltage.
-
Temperature Sensors:
- Monitor device and environment temperature.
- Example: Thermistors on IGBT modules prevent overheating.
Thermal Management Components
Ensure components operate within safe temperature ranges.
-
Heat Sinks:
- Passive cooling by increasing surface area.
- Example: Aluminum heat sinks attached to MOSFETs.
-
Cooling Fans:
- Active air cooling to dissipate heat.
- Example: Fans blowing air over inverter modules.
-
Liquid Cooling Systems:
- Used for high-power modules requiring efficient heat removal.
- Example: Liquid-cooled battery packs and inverters in high-performance EVs.
Mind Map: Power Electronics Components and Their Functions
Integrated Example: Simplified EV Power Stage
Consider a simplified EV power stage where a 400V battery powers a three-phase motor through an inverter:
- Battery Pack: Provides 400V DC.
- Inverter: Uses IGBTs to convert 400V DC to variable frequency AC.
- Control Unit: A DSP runs motor control algorithms and generates PWM signals.
- Sensors: Current sensors monitor motor phases; temperature sensors protect IGBTs.
- Thermal Management: Heat sinks and liquid cooling maintain safe operating temperatures.
This example shows how components integrate to deliver controlled power to the motor efficiently and safely.
Summary
Understanding the key components and their functions in EV power electronics lays the foundation for effective design and troubleshooting. Each component plays a critical role, and their proper selection and integration ensure the EV operates efficiently, reliably, and safely.
1.3 Importance of Power Electronics for EV Performance
Power electronics play a pivotal role in determining the overall performance, efficiency, reliability, and user experience of electric vehicles (EVs). They serve as the critical interface between the battery, electric motor, and charging infrastructure, managing the flow and conversion of electrical energy with precision and adaptability.
Key Roles of Power Electronics in EV Performance
- Energy Conversion and Control: Efficiently converting DC battery voltage to the required AC voltage for the motor and vice versa.
- Power Management: Regulating voltage and current to optimize battery usage and motor output.
- Thermal Management: Minimizing heat generation and ensuring components operate within safe temperature ranges.
- Safety and Protection: Implementing fault detection, overcurrent protection, and isolation.
- Communication and Integration: Enabling seamless interaction with battery management systems (BMS), motor controllers, and charging stations.
Mind Map: Importance of Power Electronics in EV Performance
Detailed Explanation
-
Energy Conversion and Control:
- The battery in an EV stores energy as DC voltage. However, the traction motor typically requires AC voltage with variable frequency and amplitude.
- Power electronics devices such as inverters convert the DC voltage into controlled AC voltage, enabling precise motor speed and torque control.
- Example: A three-phase inverter uses PWM (Pulse Width Modulation) to generate sinusoidal AC waveforms from DC supply, allowing smooth acceleration and regenerative braking.
-
Power Management:
- Efficient power management ensures maximum utilization of battery energy, extending driving range.
- DC-DC converters step down high-voltage battery output to lower voltages for auxiliary systems (e.g., 12V systems).
- Example: A buck converter efficiently converts 400V battery voltage to 12V for lighting and infotainment, minimizing energy loss.
-
Thermal Management:
- Power electronics components generate heat due to switching losses and conduction losses.
- Proper thermal design prevents overheating, which can degrade performance and reduce lifespan.
- Example: Incorporating liquid cooling channels in inverter modules to maintain optimal operating temperatures under high load.
-
Safety and Protection:
- Power electronics incorporate sensors and control algorithms to detect faults such as overcurrent, short circuits, and thermal runaway.
- Protective measures ensure safe operation and prevent damage to EV components.
- Example: Overcurrent protection circuits disconnect the inverter if current exceeds safe limits, preventing catastrophic failure.
-
Communication and Integration:
- Power electronics systems communicate with the BMS and vehicle control units to coordinate charging, discharging, and motor control.
- Integration with charging infrastructure protocols (e.g., CCS, CHAdeMO) ensures compatibility and efficient charging.
- Example: The onboard charger communicates with the charging station to negotiate charging current and voltage, optimizing charging speed and battery health.
Mind Map: Power Electronics Impact on EV Performance Metrics
Practical Example: How Power Electronics Enhance Regenerative Braking
- Regenerative braking converts kinetic energy back into electrical energy to recharge the battery.
- The inverter reverses the motor operation, acting as a generator.
- Power electronics control the current flow from the motor back to the battery safely and efficiently.
Example Scenario:
- When the driver applies brakes, the inverter modulates the motor to generate electricity.
- The DC-DC converter manages voltage levels to ensure the battery accepts the charge without damage.
- This process improves overall energy efficiency and extends driving range.
Summary
Power electronics are the backbone of electric vehicle performance, enabling efficient energy conversion, precise control, safety, and integration with charging infrastructure. Understanding their importance helps engineers and technicians optimize EV designs for better range, reliability, and user satisfaction.
1.4 Basic Electrical Concepts for EV Power Electronics
Understanding fundamental electrical concepts is essential for designing and working with power electronics in electric vehicles (EVs). This section covers key concepts such as voltage, current, resistance, power, energy, and how they relate to EV power electronics systems.
Key Concepts Overview
- Voltage (V): The electrical potential difference, driving current through a circuit.
- Current (I): The flow of electric charge, measured in amperes (A).
- Resistance (R): Opposition to current flow, measured in ohms (Ω).
- Power (P): The rate of energy transfer, measured in watts (W).
- Energy (E): The total work done or heat generated, measured in joules (J) or kilowatt-hours (kWh).
Mind Map: Basic Electrical Concepts
Ohm’s Law and Its Application
Ohm’s Law is fundamental in power electronics design:
\[ V = I \times R \]
- Example: If a motor winding has a resistance of 0.5 Ω and the current is 20 A, the voltage drop across the winding is:
\[ V = 20 A \times 0.5 \Omega = 10 V \]
This helps in estimating losses and designing components.
Power Calculations
Power in DC circuits is calculated as:
\[ P = V \times I \]
- Example: A DC-DC converter outputting 48 V at 15 A delivers:
\[ P = 48 V \times 15 A = 720 W \]
This is critical for selecting components rated for the correct power levels.
Energy and Battery Capacity
Battery capacity is often given in ampere-hours (Ah) or kilowatt-hours (kWh).
- Example: A 60 kWh battery pack operating at 400 V has an approximate capacity in Ah:
\[ \text{Capacity (Ah)} = \frac{60,000 Wh}{400 V} = 150 Ah \]
Understanding this helps in estimating vehicle range and charging times.
Mind Map: Power and Energy Relationships
AC Concepts Relevant to EV Charging
EV charging infrastructure often involves AC power:
-
RMS Voltage: Effective voltage value for AC.
-
Frequency: Typically 50 or 60 Hz.
-
Power Factor: Ratio of real power to apparent power.
-
Example: A Level 2 charger supplies 240 V RMS at 30 A with a power factor of 0.95:
\[ P = V \times I \times PF = 240 V \times 30 A \times 0.95 = 6840 W \]
Mind Map: AC Electrical Concepts
Practical Example: Calculating Power Loss in a DC-DC Converter
Consider a 12 V to 48 V DC-DC converter supplying 10 A at the output with an efficiency of 90%.
- Output power:
\[ P_{out} = 48 V \times 10 A = 480 W \]
- Input power:
\[ P_{in} = \frac{P_{out}}{Efficiency} = \frac{480 W}{0.9} = 533.3 W \]
- Power loss:
\[ P_{loss} = P_{in} - P_{out} = 533.3 W - 480 W = 53.3 W \]
This loss manifests as heat, which must be managed in design.
Summary
Mastering these basic electrical concepts enables EV technicians, power engineers, and students to design, analyze, and troubleshoot power electronics systems effectively. Using mind maps helps visualize relationships, and practical examples ground theory in real-world applications.
1.5 Practical Example: Simple DC-DC Converter in an EV
Introduction
A DC-DC converter is a fundamental power electronics component in electric vehicles (EVs) used to step down or step up voltage levels to power various subsystems. In EVs, a common use case is stepping down the high-voltage battery pack (e.g., 400 V) to a lower voltage (e.g., 12 V) to supply auxiliary loads such as lighting, infotainment, and control electronics.
Objective
Design and understand a simple buck converter (step-down DC-DC converter) to convert 400 V from the EV battery to a stable 12 V output.
Buck Converter Basics
- Topology: Uses a switch (MOSFET), diode, inductor, and capacitor.
- Operation: The switch turns ON and OFF at high frequency, controlling energy transfer to the output.
- Output Voltage: Controlled by duty cycle (D) of the switch.
Mind Map: Buck Converter Components and Functions
Step-by-Step Design Example
-
Specifications:
- Input Voltage (V_in): 400 V
- Output Voltage (V_out): 12 V
- Output Current (I_out): 10 A
- Switching Frequency (f_s): 100 kHz
-
Calculate Duty Cycle (D): \[ D = \frac{V_{out}}{V_{in}} = \frac{12}{400} = 0.03 \]
-
Inductor Selection:
- Choose inductor ripple current (ΔI_L) ~ 20-40% of I_out, say 30%: \[ \Delta I_L = 0.3 \times 10 = 3 A \]
- Inductance (L): \[ L = \frac{V_{in} - V_{out}}{\Delta I_L \times f_s} \times D = \frac{400 - 12}{3 \times 100000} \times 0.03 \approx 3.84 \mu H \]
-
Capacitor Selection:
- Output voltage ripple (ΔV_out) target: 0.5% of V_out = 0.06 V
- Capacitor ripple current and ESR considered.
- Approximate capacitance (C): \[ C = \frac{\Delta I_L}{8 \times f_s \times \Delta V_{out}} = \frac{3}{8 \times 100000 \times 0.06} = 625 \mu F \]
-
Switch and Diode Ratings:
- Switch voltage rating > V_in (e.g., 600 V MOSFET)
- Switch current rating > I_out with margin (e.g., 15 A)
- Diode voltage rating > V_in, current rating > I_out
Mind Map: Design Parameters and Calculations
Control and Regulation
- Use a PWM controller IC or microcontroller to generate the gate drive signal.
- Feedback from output voltage to adjust duty cycle and maintain 12 V output.
Practical Considerations and Best Practices
- Thermal Management: Use heat sinks or cooling for MOSFET and diode.
- EMI Mitigation: Add input/output filters and proper PCB layout.
- Protection: Include overcurrent, overvoltage, and short-circuit protection.
- Component Quality: Use automotive-grade components for reliability.
Example Application Scenario
An EV’s 400 V battery powers the main traction motor. The 12 V system powers the dashboard, lights, and infotainment. The buck converter designed above ensures a stable 12 V supply regardless of battery voltage fluctuations.
Summary Mind Map: Simple DC-DC Converter in EV
This practical example provides a foundational understanding of how a simple DC-DC converter functions within an EV, illustrating key design parameters, calculations, and best practices with easy-to-understand examples and mind maps.
2. Power Semiconductor Devices and Their Applications
2.1 Overview of Power Semiconductor Devices
Power semiconductor devices are the backbone of power electronics systems in electric vehicles (EVs). They enable the efficient conversion and control of electrical energy, handling high voltages and currents with minimal losses. Understanding these devices, their characteristics, and applications is essential for designing robust and efficient EV power electronics.
Key Types of Power Semiconductor Devices
- Diodes
- Bipolar Junction Transistors (BJTs)
- Metal-Oxide-Semiconductor Field-Effect Transistors (MOSFETs)
- Insulated Gate Bipolar Transistors (IGBTs)
- Silicon-Controlled Rectifiers (SCRs) / Thyristors
- Wide Bandgap Devices (SiC, GaN)
Mind Map: Power Semiconductor Devices
Detailed Descriptions and Examples
Diodes
- Function: Allow current flow in one direction only.
- Role in EVs: Used for rectification in chargers, freewheeling in motor drives.
- Example: In a buck converter for a DC-DC converter stage, a Schottky diode is often used as a freewheeling diode due to its low forward voltage drop and fast recovery time.
Bipolar Junction Transistors (BJTs)
- Function: Current-controlled devices used for amplification and switching.
- Role in EVs: Historically used but largely replaced by MOSFETs and IGBTs due to slower switching and complex drive requirements.
- Example: Early EV motor controllers used BJTs for switching but modern designs favor MOSFETs or IGBTs.
Metal-Oxide-Semiconductor Field-Effect Transistors (MOSFETs)
- Function: Voltage-controlled devices with high input impedance and fast switching.
- Role in EVs: Preferred for low to medium voltage applications (up to ~250V), such as auxiliary DC-DC converters and onboard chargers.
- Example: A 48V DC-DC converter in an EV uses MOSFETs for efficient step-down conversion to 12V.
Insulated Gate Bipolar Transistors (IGBTs)
- Function: Combine the easy gate drive of MOSFETs with the high current and voltage capability of BJTs.
- Role in EVs: Widely used in traction inverters for driving the main traction motor due to their ability to handle high voltages (400V-800V) and currents.
- Example: The main inverter in a Tesla Model S uses IGBTs to convert DC battery voltage to three-phase AC for the motor.
Silicon-Controlled Rectifiers (SCRs) / Thyristors
- Function: Latching devices used for controlled rectification and high power switching.
- Role in EVs: Less common in modern EVs but still used in some charging infrastructure and industrial applications.
- Example: High-power DC fast chargers may use SCRs for controlled rectification stages.
Wide Bandgap Devices (SiC and GaN)
- Function: Offer superior electrical properties such as higher breakdown voltage, faster switching, and better thermal performance.
- Role in EVs: Emerging technology increasingly used in inverters and DC-DC converters to improve efficiency and reduce size.
- Example: A SiC MOSFET-based inverter can operate at higher switching frequencies, reducing the size of passive components and improving overall system efficiency.
Mind Map: Device Selection Criteria
Practical Example: Choosing a Power Semiconductor Device for a 48V DC-DC Converter
- Scenario: Design a step-down converter from 48V battery to 12V auxiliary system.
- Requirements: Switching frequency ~100kHz, output current 10A, high efficiency.
Step 1: Voltage and Current Ratings
- Select MOSFETs with at least 60V rating (to have margin over 48V).
- Continuous current rating > 15A for reliability.
Step 2: Switching Frequency
- MOSFETs preferred due to fast switching capabilities.
Step 3: Thermal Considerations
- Choose MOSFETs with low R_DS(on) to minimize conduction losses.
Step 4: Gate Drive
- Simple gate drive circuit with 10-12V gate voltage.
Result: Use a logic-level N-channel MOSFET such as the IRLZ44N or similar, which is widely available, cost-effective, and suitable for this application.
Summary
Power semiconductor devices are critical for the efficient operation of EV power electronics. Selecting the right device depends on voltage, current, switching frequency, thermal considerations, and cost. MOSFETs and IGBTs dominate EV applications, with wide bandgap devices gaining traction for next-generation designs.
Understanding these devices and their practical applications enables engineers and technicians to design and maintain effective EV power systems.
2.2 MOSFETs vs IGBTs: Selection Criteria and Use Cases
Power semiconductor devices are the heart of power electronics in electric vehicles (EVs). Among these, MOSFETs (Metal-Oxide-Semiconductor Field-Effect Transistors) and IGBTs (Insulated Gate Bipolar Transistors) are the two most widely used devices. Understanding their characteristics, selection criteria, and typical use cases is crucial for designing efficient and reliable EV power electronics.
Overview: MOSFETs and IGBTs
| Feature | MOSFET | IGBT |
|---|---|---|
| Voltage Range | Low to Medium (up to ~250V) | Medium to High (up to ~1200V+) |
| Switching Speed | Very High | Moderate |
| Conduction Loss | Low at low voltage | Low at high voltage |
| Gate Drive Voltage | Low (~10-15V) | Low (~15V) |
| Thermal Performance | Moderate | Good |
| Cost | Generally lower | Generally higher |
Mind Map: Key Differences Between MOSFETs and IGBTs
Selection Criteria
-
Voltage and Current Ratings
- MOSFETs excel in low to medium voltage applications (e.g., 12V, 48V systems).
- IGBTs are preferred for high voltage traction inverters (e.g., 400V to 800V battery packs).
-
Switching Frequency
- MOSFETs support very high switching frequencies (up to several hundred kHz), enabling smaller passive components.
- IGBTs have slower switching speeds, typically used up to tens of kHz.
-
Efficiency and Losses
- At low voltages, MOSFETs have lower conduction losses.
- At high voltages and currents, IGBTs have better conduction efficiency.
-
Thermal Management
- IGBTs generally handle thermal stress better in high power applications.
-
Cost and Availability
- MOSFETs are generally less expensive and widely available for low voltage applications.
- IGBTs are costlier but necessary for high power EV traction systems.
-
Gate Drive Complexity
- MOSFETs require simpler gate drive circuits.
- IGBTs may require isolated gate drivers and more complex protection.
Mind Map: Selection Criteria for MOSFET vs IGBT
Use Cases in Electric Vehicles
MOSFET Use Cases
- 12V and 48V DC-DC Converters: Efficient step-down converters powering auxiliary systems.
- Onboard Chargers (low power): High-frequency switching for compact design.
- Pre-charge Circuits: Soft start of high voltage battery systems.
IGBT Use Cases
- Traction Inverters: Driving the main traction motor at high voltages (400V-800V).
- High-Power DC Fast Chargers: Handling large currents and voltages.
- HVAC Compressors and Pumps: High power motor drives within EVs.
Practical Example 1: Choosing a Device for a 48V DC-DC Converter
- System Voltage: 48V input, 12V output
- Power Level: 1.5 kW
- Switching Frequency: 200 kHz for size reduction
Decision: MOSFETs are preferred due to their high switching speed and low conduction losses at this voltage and power level.
Example Device: N-channel MOSFET with 30V rating, Rds(on) < 5 mΩ.
Practical Example 2: Selecting a Device for a 400V Traction Inverter
- System Voltage: 400V battery pack
- Power Level: 50 kW motor drive
- Switching Frequency: 10-20 kHz
Decision: IGBTs are preferred because of their ability to handle high voltage and current with good efficiency and thermal robustness.
Example Device: IGBT module rated for 1200V, 100A with integrated gate drivers.
Summary Table: When to Use MOSFET vs IGBT
| Application Area | Preferred Device | Reason |
|---|---|---|
| Low-voltage DC-DC converters | MOSFET | High switching speed, low conduction loss |
| Traction motor inverters | IGBT | High voltage/current capability |
| Onboard chargers (low power) | MOSFET | High frequency operation |
| Fast chargers (high power) | IGBT | Robustness and voltage rating |
Additional Tips and Best Practices
- For emerging EV designs with higher switching frequencies and efficiency demands, Silicon Carbide (SiC) MOSFETs are gaining popularity, combining high voltage ratings with fast switching.
- Always consider thermal design early; device choice impacts cooling requirements.
- Evaluate gate driver compatibility and protection features to ensure device longevity.
By carefully analyzing the system voltage, power level, switching frequency, and thermal requirements, engineers can select the optimal device—MOSFET or IGBT—to maximize efficiency, reliability, and cost-effectiveness in EV power electronics.
2.3 Diodes and Their Role in EV Circuits
Diodes are fundamental semiconductor devices that allow current to flow in one direction only, acting as electrical check valves. In electric vehicles (EVs), diodes play crucial roles in power electronics circuits, ensuring proper current flow, protecting components, and enabling efficient energy conversion.
Key Functions of Diodes in EV Circuits
- Rectification: Converting AC to DC in charging and onboard power systems.
- Freewheeling: Providing a path for inductive load currents when switches turn off, protecting components.
- Reverse Polarity Protection: Preventing damage from incorrect battery connections.
- Voltage Clamping: Protecting circuits from voltage spikes.
- Signal Demodulation and Sensing: Used in control and diagnostic circuits.
Types of Diodes Commonly Used in EV Power Electronics
- Standard PN Junction Diodes: Used for general rectification.
- Schottky Diodes: Low forward voltage drop, fast switching, used in DC-DC converters.
- Fast Recovery Diodes: Used in inverters and motor drives to handle rapid switching.
- Zener Diodes: Voltage regulation and protection.
Mind Map: Roles of Diodes in EV Circuits
Practical Example 1: Using a Freewheeling Diode in a Motor Drive Inverter
In an EV traction motor inverter, the switching devices (IGBTs or MOSFETs) rapidly turn on and off to control motor speed and torque. When the switch turns off, the inductive load (motor winding) tries to maintain current flow, causing a voltage spike that can damage components.
Solution: A freewheeling diode connected in parallel with the switch provides a path for the inductive current, preventing voltage spikes.
Example:
- An IGBT switch controls current to a motor phase.
- A fast recovery diode is placed in anti-parallel with the IGBT.
- When the IGBT turns off, the diode conducts the inductive current safely.
Best Practice: Use fast recovery or ultra-fast diodes to minimize switching losses and improve efficiency.
Practical Example 2: Schottky Diodes in DC-DC Converters
DC-DC converters in EVs step down or step up battery voltage to power auxiliary systems (e.g., 12V systems).
Why Schottky Diodes?
- Low forward voltage drop (~0.3V vs 0.7V for silicon diodes) reduces conduction losses.
- Fast switching reduces switching losses and improves efficiency.
Example:
- A buck converter powering the 12V system uses a Schottky diode as the freewheeling diode.
- This choice improves overall converter efficiency and reduces heat generation.
Best Practice: Select Schottky diodes with appropriate current and voltage ratings and ensure proper thermal management.
Practical Example 3: Reverse Polarity Protection Using a Diode
Incorrect battery connection can cause severe damage to EV electronics.
Solution: A diode placed in series or parallel (with fuse) can block reverse current.
Example:
- A diode placed in series with the battery positive terminal prevents current flow if the battery is connected backward.
- Although this causes a voltage drop, it protects sensitive electronics.
Alternative: Use MOSFET-based ideal diode controllers for lower losses.
Mind Map: Diode Selection Criteria in EV Applications
Summary
Diodes are indispensable in EV power electronics, serving multiple roles from rectification and protection to enabling efficient switching. Understanding diode types, their characteristics, and proper application ensures reliable and efficient EV system design.
Remember: Always consider the specific application requirements and operating conditions when selecting diodes for EV circuits to optimize performance and longevity.
2.4 Best Practices for Device Protection and Thermal Management
Effective device protection and thermal management are critical to ensuring the reliability, efficiency, and longevity of power semiconductor devices in electric vehicle (EV) power electronics. This section covers best practices with practical examples and mind maps to help visualize key concepts.
Key Objectives:
- Protect devices from electrical overstress (EOS) and thermal overstress
- Maintain device junction temperature within safe limits
- Enhance system reliability and prevent catastrophic failures
Mind Map: Device Protection Strategies
Mind Map: Thermal Management Techniques
Best Practices for Device Protection
Overcurrent Protection
- Use fast-acting fuses or electronic current limiters to prevent damage from sudden current surges.
- Example: In a MOSFET-based inverter, place a fuse on the DC bus line to interrupt excessive current during a short circuit.
Overvoltage Protection
- Implement snubber circuits (RC or RCD snubbers) across switching devices to absorb voltage spikes caused by switching transients.
- Use TVS diodes for transient voltage suppression on sensitive nodes.
- Example: Adding an RC snubber across an IGBT in the inverter stage reduces voltage overshoot and protects the device.
Gate Protection
- Include gate resistors to limit inrush gate current and reduce ringing.
- Use Zener diodes or dedicated gate protection ICs to clamp gate voltage within safe limits.
- Example: A 10 Ω gate resistor combined with a 15 V Zener diode protects the MOSFET gate from voltage spikes.
Short-Circuit and Fault Detection
- Employ current sensors (Hall effect or shunt resistors) to detect abnormal current levels and trigger shutdown.
- Design control firmware to respond rapidly to fault conditions.
- Example: In a DC-DC converter, a shunt resistor senses overcurrent and signals the controller to disable the switching stage.
ESD Protection
- Use TVS diodes at input/output connectors.
- Design PCB layout with proper grounding and shielding to minimize ESD susceptibility.
Best Practices for Thermal Management
Heat Sink Selection and Design
- Choose heat sinks with adequate thermal resistance based on device power dissipation.
- Use active cooling (fans or liquid) for high-power applications.
- Example: An IGBT module dissipating 100 W may require a heat sink with thermal resistance below 1 °C/W and a fan for forced convection.
Thermal Interface Materials (TIM)
- Apply high-quality thermal pads or thermal grease between device and heat sink to improve thermal conductivity.
- Ensure even and thin application to avoid air gaps.
- Example: Using a silicone-based thermal grease with 4 W/mK conductivity improves heat transfer from MOSFET to heat sink.
Temperature Monitoring and Feedback
- Integrate temperature sensors close to power devices to monitor junction or case temperature.
- Use sensor data to implement thermal derating or shutdown in firmware.
- Example: A thermistor placed near the IGBT module triggers a cooling fan when temperature exceeds 80 °C.
PCB Thermal Design
- Use thermal vias under power devices to transfer heat to inner or bottom copper layers.
- Optimize component placement to maximize airflow and minimize thermal coupling.
- Example: In a DC-DC converter PCB, place MOSFETs near the edge with multiple thermal vias and avoid clustering heat-generating components.
Practical Example: Protecting and Cooling a MOSFET in a DC-DC Converter
Scenario: Designing a synchronous buck converter for a 48 V EV auxiliary system.
-
Protection:
- Place a 15 A fast-acting fuse on the input line.
- Add an RC snubber (R=10 Ω, C=100 nF) across the MOSFET drain-source terminals.
- Use a 10 Ω gate resistor and a 15 V Zener diode on the gate.
- Include a shunt resistor (1 mΩ) for current sensing.
- Add a TVS diode on the input to clamp voltage spikes.
-
Thermal Management:
- Select a heat sink with <1.5 °C/W thermal resistance.
- Apply high-quality thermal grease between MOSFET and heat sink.
- Add multiple thermal vias beneath the MOSFET on the PCB.
- Place a thermistor near the MOSFET to monitor temperature.
- Implement firmware to reduce switching frequency if temperature exceeds 85 °C.
Outcome: This integrated approach ensures the MOSFET operates within safe electrical and thermal limits, improving reliability and efficiency.
Summary
- Device protection and thermal management must be designed hand-in-hand.
- Use a combination of hardware (fuses, snubbers, heat sinks) and software (fault detection, thermal derating).
- Proper PCB layout and component selection are foundational.
- Continuous monitoring and adaptive control improve system resilience.
By following these best practices, EV power electronics designers can significantly enhance device longevity and system safety.
2.5 Practical Example: Designing a MOSFET-based Inverter Stage
Designing a MOSFET-based inverter stage is a fundamental skill in EV power electronics, as inverters convert DC battery voltage into AC voltage to drive the traction motor. This section will guide you through the design process with clear examples and mind maps to visualize key concepts.
Step 1: Define Inverter Requirements
- Voltage Rating: Match the battery pack voltage (e.g., 400 V DC)
- Current Rating: Based on motor power and efficiency (e.g., 100 A peak)
- Switching Frequency: Balance between efficiency and EMI (e.g., 10-20 kHz)
- Topology: Typically a three-phase full-bridge inverter
Mind Map: Inverter Design Requirements
Step 2: Select Suitable MOSFETs
Key parameters:
- Voltage Rating (Vds): At least 20-30% higher than max DC bus voltage
- Current Rating (Id): Should handle peak motor current with margin
- Rds(on): Lower values reduce conduction losses
- Gate Charge (Qg): Lower values improve switching speed and efficiency
- Thermal Characteristics: Check junction-to-case thermal resistance
Example:
| Parameter | Value |
|---|---|
| Vds | 650 V |
| Id (continuous) | 150 A |
| Rds(on) | 8 mΩ |
| Qg | 60 nC |
Mind Map: MOSFET Selection Criteria
Step 3: Design Gate Driver Circuit
- Use isolated gate drivers to protect control electronics
- Provide proper gate voltage (e.g., +15 V for enhancement mode MOSFETs)
- Include gate resistors to control switching speed and reduce ringing
- Add bootstrap circuits for high-side MOSFETs
Example:
- Gate resistor: 10 Ω
- Gate driver IC: IRS2110 or equivalent
Mind Map: Gate Driver Design
Step 4: Implement Protection Features
- Overcurrent detection via shunt resistors or Hall sensors
- Overtemperature protection using thermistors or temperature sensors
- Shoot-through prevention by dead-time insertion in PWM signals
Example:
- Dead-time: 1 µs
- Overcurrent threshold: 120 A
Mind Map: Protection Features
Step 5: Layout and Thermal Management
- Use a compact PCB layout with short, wide traces for power paths
- Place MOSFETs on a heat sink or use direct cooling methods
- Ensure proper isolation and EMI mitigation techniques
Example:
- Copper thickness: 2 oz
- Thermal pad under MOSFETs
Mind Map: Layout & Thermal Management
Step 6: Simulation and Testing
- Simulate inverter switching waveforms using SPICE or MATLAB/Simulink
- Test gate drive signals and dead-time
- Measure efficiency and thermal performance under load
Example:
- Simulate switching losses at 15 kHz
- Validate gate voltage waveforms
Mind Map: Simulation & Testing
Summary Table: Example MOSFET-based Inverter Stage Design
| Design Aspect | Specification / Component |
|---|---|
| DC Bus Voltage | 400 V |
| Peak Current | 100 A |
| Switching Frequency | 15 kHz |
| MOSFET Model | 650 V, 150 A, 8 mΩ Rds(on) |
| Gate Driver | IRS2110 with 10 Ω gate resistor |
| Dead-time | 1 µs |
| Protection | Overcurrent & Overtemperature |
| Cooling | Heat sink with thermal pad |
Final Notes
This example provides a practical approach to designing a MOSFET-based inverter stage for EV applications. By carefully selecting components, implementing protection, and optimizing layout and thermal management, you can achieve a reliable and efficient inverter suitable for traction motor control.
For further learning, try building a small-scale inverter prototype using a lower voltage battery and a small three-phase motor to observe the concepts in action.
3. DC-DC Converters for Electric Vehicles
3.1 Types of DC-DC Converters Used in EVs
DC-DC converters are essential components in electric vehicles (EVs) as they manage voltage levels between the high-voltage battery pack and the low-voltage auxiliary systems, such as the 12V electrical system. Understanding the types of DC-DC converters used in EVs helps in selecting the right topology for efficiency, size, cost, and reliability.
Overview of DC-DC Converters in EVs
In EVs, DC-DC converters perform two primary functions:
- Step-down (buck) conversion to supply low-voltage loads from the high-voltage battery.
- Step-up (boost) conversion in some cases to increase voltage for specific components.
They also provide isolation, voltage regulation, and protection.
Common Types of DC-DC Converters in EVs
Below is a mind map summarizing the main types:
Non-Isolated Converters
These converters do not provide galvanic isolation between input and output, making them simpler and more efficient but less safe for high-voltage isolation requirements.
Buck Converter
- Function: Steps down voltage from a higher level to a lower level.
- Use Case: Commonly used to convert the high-voltage battery (e.g., 400 V) down to 12 V for auxiliary systems.
- Example: A 400 V to 12 V buck converter powers the vehicle’s lighting and infotainment system.
Boost Converter
- Function: Steps up voltage from a lower level to a higher level.
- Use Case: Less common but used when a component requires a voltage higher than the battery voltage.
- Example: Boosting 48 V battery voltage to 400 V for certain powertrain components.
Buck-Boost Converter
- Function: Can step voltage up or down depending on input and output requirements.
- Use Case: Useful when the input voltage varies above and below the output voltage.
- Example: Maintaining a stable 12 V output when battery voltage fluctuates between 10 V and 14 V.
Cuk Converter
- Function: Provides voltage inversion and can step up or down voltage.
- Use Case: Rarely used but valuable for specific applications requiring inverted output voltage.
Isolated Converters
These converters provide galvanic isolation using transformers, enhancing safety and noise immunity, especially important in high-voltage EV systems.
Flyback Converter
- Function: Uses a transformer to provide isolation and voltage conversion.
- Use Case: Suitable for low to medium power levels, often in onboard chargers.
- Example: Isolated 400 V to 12 V converter in an onboard charger module.
Forward Converter
- Function: Transformer-based converter with better efficiency than flyback for medium power.
- Use Case: Used in EV charging infrastructure where isolation and higher power levels are needed.
Half-Bridge and Full-Bridge Converters
- Function: High-power isolated converters using multiple switches.
- Use Case: Employed in fast charging stations and high-power onboard chargers.
Mind Map: Non-Isolated vs Isolated DC-DC Converters
Practical Example: Buck Converter for 12V Auxiliary System
Scenario: An EV has a 400 V battery pack and needs to power a 12 V system for lights, infotainment, and control units.
Solution: Design a buck converter to step down 400 V to 12 V with high efficiency.
Key Design Points:
- Switching frequency: 100 kHz to balance size and efficiency.
- Use of synchronous rectification (MOSFETs) to reduce losses.
- Proper EMI filtering to avoid interference with sensitive electronics.
Outcome: A compact, efficient DC-DC converter that reliably powers the 12 V system from the high-voltage battery.
Summary
Selecting the appropriate DC-DC converter type depends on the voltage levels, power requirements, isolation needs, and efficiency goals. Non-isolated converters like buck and buck-boost are prevalent for onboard auxiliary power, while isolated converters are favored in charging infrastructure and safety-critical applications.
Understanding these types and their applications enables electrical engineers and EV technicians to design and troubleshoot power electronics systems effectively.
3.2 Buck, Boost, and Buck-Boost Converter Topologies
Power electronics converters are essential in electric vehicles (EVs) for managing voltage levels efficiently. Among these, Buck, Boost, and Buck-Boost converters are widely used DC-DC converter topologies that enable voltage step-down, step-up, or both, respectively. Understanding their operation, advantages, and practical applications is crucial for designing efficient EV power systems.
Buck Converter (Step-Down Converter)
Operation:
- Converts a higher input voltage to a lower output voltage.
- Uses a switch (typically a MOSFET), diode, inductor, and capacitor.
- When the switch is ON, energy is stored in the inductor; when OFF, the inductor releases energy to the load.
Key Features:
- Output voltage is always less than input voltage.
- High efficiency due to energy storage in the inductor.
Practical Example:
- Supplying a 12V auxiliary system from a 48V EV battery pack.
Mind Map:
Boost Converter (Step-Up Converter)
Operation:
- Converts a lower input voltage to a higher output voltage.
- Consists of a switch, diode, inductor, and capacitor.
- When the switch is ON, the inductor stores energy; when OFF, energy is transferred to the output, boosting voltage.
Key Features:
- Output voltage is always greater than input voltage.
- Used when the load requires a higher voltage than the source.
Practical Example:
- Boosting voltage from a 12V auxiliary battery to 48V for certain EV subsystems.
Mind Map:
Buck-Boost Converter (Step-Up/Step-Down Converter)
Operation:
- Can either step-up or step-down voltage depending on duty cycle.
- Uses a switch, diode, inductor, and capacitor.
- Provides an output voltage magnitude that can be higher or lower than input, with inverted polarity (in inverting buck-boost).
Key Features:
- Versatile voltage regulation.
- Can invert output polarity (inverting buck-boost) or maintain same polarity (non-inverting buck-boost).
Practical Example:
- Regulating voltage for sensitive electronics that require stable voltage regardless of battery voltage fluctuations.
Mind Map:
Comparative Table of Buck, Boost, and Buck-Boost Converters
| Feature | Buck Converter | Boost Converter | Buck-Boost Converter |
|---|---|---|---|
| Voltage Conversion | Step-down (Vout < Vin) | Step-up (Vout > Vin) | Step-up or Step-down |
| Output Polarity | Same as input | Same as input | Inverted (inverting type) |
| Complexity | Simple | Simple | Moderate |
| Efficiency | High | High | Moderate to High |
| Typical Applications | 48V to 12V systems | 12V to 48V systems | Voltage regulation, battery management |
Practical Example: Designing a Buck Converter for 48V to 12V Conversion
Problem: Design a buck converter to supply 12V at 5A from a 48V battery.
Steps:
- Calculate duty cycle: D = Vout / Vin = 12V / 48V = 0.25
- Select inductor to maintain continuous conduction mode (CCM).
- Choose switching frequency (e.g., 100 kHz) balancing size and efficiency.
- Select MOSFET and diode with voltage and current ratings above max values.
- Design output capacitor to reduce voltage ripple.
Example Outcome:
- Duty cycle: 25%
- Inductor: 33 µH
- Output capacitor: 470 µF low ESR
- MOSFET: 60V, 20A rating
This design ensures efficient power delivery with minimal losses and stable output voltage.
Summary
Understanding the fundamental operation and applications of buck, boost, and buck-boost converters is essential for EV power electronics design. Each topology offers unique advantages and is chosen based on the voltage requirements of the subsystem. Incorporating best practices such as proper component selection, duty cycle calculation, and ripple management ensures reliable and efficient converter performance.
3.3 Efficiency Optimization Techniques
Efficiency optimization in DC-DC converters for electric vehicles (EVs) is crucial to maximize battery life, reduce heat dissipation, and improve overall vehicle performance. This section explores practical techniques to enhance converter efficiency, supported by clear examples and mind maps to visualize key concepts.
Key Factors Affecting Efficiency
- Conduction losses
- Switching losses
- Passive component losses
- Control strategy losses
Mind Map: Factors Influencing DC-DC Converter Efficiency
Semiconductor Device Selection
Choosing power devices with low conduction and switching losses is foundational. For example, using MOSFETs with low R_DS(on) reduces conduction losses, especially important at high currents.
Example:
- A buck converter designed for 12V to 48V step-up uses a MOSFET with R_DS(on) of 5 mΩ instead of 10 mΩ, reducing conduction losses by half, improving efficiency by approximately 2-3%.
Switching Frequency Optimization
Higher switching frequencies reduce passive component size but increase switching losses. Finding the optimal frequency balances efficiency and size.
Example:
- A boost converter operating at 100 kHz shows 95% efficiency, but increasing frequency to 500 kHz reduces efficiency to 92% due to switching losses, despite smaller inductor size.
Gate Drive Optimization
Proper gate resistor sizing and driver strength minimize switching losses and ringing.
Example:
- Using a 10 Ω gate resistor instead of 1 Ω reduces ringing and EMI, improving reliability and slightly increasing efficiency by reducing switching loss spikes.
Use of Synchronous Rectification
Replacing diodes with synchronous MOSFETs reduces forward voltage drop losses.
Example:
- A synchronous buck converter achieves 96% efficiency compared to 90% with diode rectification at 10A load due to lower conduction losses.
Soft Switching Techniques
Implementing Zero Voltage Switching (ZVS) or Zero Current Switching (ZCS) reduces switching losses by ensuring devices switch when voltage or current is near zero.
Example:
- A resonant converter using ZVS achieves 98% efficiency at medium load, outperforming hard-switched converters by 3-4%.
Passive Component Selection
Using inductors with low core and copper losses and capacitors with low Equivalent Series Resistance (ESR) minimizes losses.
Example:
- Replacing a standard inductor with a high-quality ferrite core inductor reduces core losses by 30%, improving overall converter efficiency.
Thermal Management
Effective heat dissipation prevents efficiency degradation due to increased device temperature.
Example:
- Adding a heat sink and forced air cooling reduces MOSFET junction temperature by 20°C, improving efficiency by 1-2% under continuous load.
PCB Layout Best Practices
Minimizing parasitic inductances and resistances reduces switching noise and losses.
Example:
- Shortening the high-current loop and using wide copper traces reduces voltage spikes and EMI, enhancing efficiency and reliability.
Integrated Example: Designing a High-Efficiency 12V to 48V Boost Converter
Step 1: Select a low R_DS(on) MOSFET (3 mΩ) with fast switching capability.
Step 2: Choose a switching frequency of 150 kHz to balance size and losses.
Step 3: Implement synchronous rectification using a MOSFET instead of a diode.
Step 4: Use a gate driver IC with adjustable gate resistor to optimize switching transitions.
Step 5: Select a high-quality inductor with low core loss and a low ESR ceramic capacitor.
Step 6: Design PCB layout with short, wide traces for high-current paths and proper grounding.
Step 7: Add a heat sink and ensure airflow for thermal management.
Result: Achieved converter efficiency of 96.5% at 10A load, with reduced thermal stress and EMI.
Summary Mind Map: Efficiency Optimization Workflow
By systematically applying these techniques, EV power electronics designers can significantly improve the efficiency of DC-DC converters, directly impacting vehicle range, reliability, and cost-effectiveness.
3.4 EMI Mitigation and Filtering Best Practices
Electromagnetic Interference (EMI) is a critical concern in DC-DC converters used in electric vehicles (EVs). EMI can cause malfunction, degrade performance, and lead to non-compliance with regulatory standards. Effective EMI mitigation and filtering are essential to ensure reliable operation and electromagnetic compatibility (EMC).
Understanding EMI Sources in DC-DC Converters
- Switching Noise: Rapid switching of power semiconductors generates high-frequency noise.
- Parasitic Inductances and Capacitances: Layout and component leads create unintended inductive and capacitive coupling.
- Ground Loops: Multiple ground paths can cause circulating currents and noise.
EMI Mitigation Mind Map
Best Practices for EMI Mitigation
-
Soft Switching Techniques:
- Use zero-voltage switching (ZVS) or zero-current switching (ZCS) to reduce switching transients.
- Example: Implementing a resonant converter topology to minimize switching noise.
-
Snubber Circuits:
- Add RC or RCD snubbers across switching devices to absorb voltage spikes.
- Example: Designing an RCD snubber for a MOSFET in a buck converter to reduce ringing.
-
PCB Layout Optimization:
- Keep high di/dt loops as small as possible to reduce radiated EMI.
- Separate noisy power traces from sensitive signal lines.
- Use continuous ground planes to provide low impedance return paths.
-
Filtering:
- Use LC or Pi-filters at the input and output to attenuate conducted EMI.
- Employ common mode chokes to suppress common mode noise.
-
Shielding and Grounding:
- Enclose sensitive circuits in metal shields connected to ground.
- Use single-point or star grounding to avoid ground loops.
Filtering Mind Map
Practical Example: Designing an EMI Filter for a 12V DC-DC Converter
Scenario: A buck converter operating at 500 kHz exhibits conducted EMI that exceeds CISPR 25 limits.
Steps:
-
Identify Noise Frequencies: Using a spectrum analyzer, observe dominant noise peaks at switching frequency and harmonics.
-
Select Filter Components:
- Input LC filter with a 10 µH inductor and 10 µF ceramic capacitor.
- Add a common mode choke rated for 5 A to suppress common mode noise.
-
Add Snubber Circuit: Design an RCD snubber (R=10 Ω, C=100 nF, D=fast recovery diode) across the MOSFET to reduce voltage spikes.
-
Optimize PCB Layout:
- Minimize loop area of the input current path.
- Separate power and control grounds.
-
Test and Iterate: Measure EMI again; adjust component values or add additional filtering if needed.
Additional Tips
- Use multilayer PCBs with dedicated ground planes.
- Keep high-frequency loops compact.
- Use low-ESR capacitors for filtering.
- Validate designs with EMI simulation tools (e.g., Ansys HFSS, CST Studio).
By integrating these best practices and examples, EV power electronics designers can effectively mitigate EMI, ensuring robust and compliant DC-DC converter operation.
3.5 Practical Example: Designing a High-Efficiency 12V DC-DC Converter
Designing a high-efficiency 12V DC-DC converter for electric vehicles (EVs) is a critical task to ensure reliable power delivery to auxiliary systems like lighting, infotainment, and control units. This section walks through the design process, best practices, and practical considerations with easy-to-understand examples.
Step 1: Define Specifications
- Input Voltage Range: 200V to 400V (typical EV battery pack voltage)
- Output Voltage: 12V DC (standard automotive voltage)
- Output Current: 10A (to power auxiliary loads)
- Efficiency Target: > 90%
- Operating Temperature Range: -40°C to 85°C
Step 2: Select Converter Topology
For stepping down a high voltage DC bus to 12V, the Buck Converter topology is most appropriate due to its simplicity and efficiency.
Mind Map: Converter Topology Selection
Step 3: Component Selection
- Power MOSFETs: Choose low R_DS(on) MOSFETs to minimize conduction losses.
- Inductor: Select an inductor with low DC resistance (DCR) and suitable current rating.
- Capacitors: Use low Equivalent Series Resistance (ESR) electrolytic and ceramic capacitors for input/output filtering.
- Controller IC: Select a PWM controller with synchronous rectification support to improve efficiency.
Example:
- MOSFET: N-channel, 30V, R_DS(on) = 5 mΩ
- Inductor: 10 µH, 15A saturation current
- Output Capacitor: 220 µF, low ESR
Step 4: Calculate Key Parameters
-
Duty Cycle (D): \[ D = \frac{V_{out}}{V_{in}} \] For 12V output and 300V input (nominal): \[ D = \frac{12}{300} = 0.04 \]
-
Inductor Ripple Current (ΔI_L): Choose 20-40% of output current (e.g., 30% of 10A = 3A)
-
Inductor Value (L): \[ L = \frac{V_{out} \times (1 - D)}{f_s \times \Delta I_L} \] Assuming switching frequency \( f_s = 200kHz \): \[ L = \frac{12 \times (1 - 0.04)}{200000 \times 3} = 19.2 \mu H \]
-
Output Capacitor Ripple Voltage (ΔV_o): Target ripple < 1% of output voltage (i.e., < 0.12V)
Step 5: Design Control Strategy
- Use Voltage Mode PWM Control or Current Mode Control for stable regulation.
- Implement Synchronous Rectification to replace diode with MOSFET for lower losses.
Mind Map: Control Strategy
Step 6: Thermal Management
- Calculate power losses (conduction + switching losses).
- Select heat sinks or cooling methods accordingly.
Example:
- MOSFET conduction loss: \( P_{cond} = I^2 \times R_{DS(on)} = 10^2 \times 0.005 = 0.5W \)
- Switching loss estimated from datasheet.
Step 7: EMI Considerations
- Use proper PCB layout to minimize loop areas.
- Add input/output LC filters.
- Use snubber circuits if necessary.
Step 8: Prototype and Testing
- Build a test board with selected components.
- Measure efficiency, output voltage ripple, thermal performance.
- Adjust component values and control parameters as needed.
Summary Mind Map: High-Efficiency 12V DC-DC Converter Design
Additional Practical Example: Efficiency Improvement Techniques
| Technique | Description | Example |
|---|---|---|
| Synchronous Rectification | Replace diode with MOSFET to reduce losses | Using a low R_DS(on) MOSFET as synchronous rectifier |
| Soft Switching | Reduce switching losses by zero-voltage switching | Implementing ZVS in buck converter |
| High Switching Frequency | Smaller passive components, but watch losses | Operating at 500 kHz instead of 200 kHz |
| Optimized PCB Layout | Minimize parasitic inductance and resistance | Short, wide traces for power paths |
This practical example provides a comprehensive approach to designing a high-efficiency 12V DC-DC converter tailored for electric vehicle applications. By following these steps and integrating best practices, engineers and technicians can build reliable and efficient power conversion modules essential for modern EV systems.
4. Inverter Design and Control for EV Traction Motors
4.1 Fundamentals of Inverter Operation
An inverter is a critical power electronics device in electric vehicles (EVs) that converts direct current (DC) from the battery into alternating current (AC) to drive the electric motor. Understanding the fundamentals of inverter operation is essential for designing efficient and reliable EV powertrains.
What is an Inverter?
- Converts DC voltage to AC voltage
- Controls frequency and amplitude of AC output
- Enables variable speed control of AC motors
Key Functions of an Inverter in EVs
- DC to AC conversion
- Motor speed and torque control
- Regenerative braking support
- Power flow management
Mind Map: Basic Inverter Operation
Types of Inverters Used in EVs
- Voltage Source Inverter (VSI): Most common, uses DC voltage source
- Current Source Inverter (CSI): Less common, uses DC current source
Operating Principle
The inverter switches the DC input on and off rapidly in a controlled sequence to produce a synthesized AC waveform. This is typically done using Pulse Width Modulation (PWM) techniques.
Example: Simple Single-Phase Inverter Operation
Imagine a single-phase inverter with two switches (S1 and S2) connected to a DC source. By alternately turning S1 and S2 ON and OFF, the output voltage polarity reverses, creating an AC waveform.
| Time Interval | S1 State | S2 State | Output Voltage |
|---|---|---|---|
| 0 - T/2 | ON | OFF | +Vdc |
| T/2 - T | OFF | ON | -Vdc |
This creates a square wave AC output.
Mind Map: Single-Phase Inverter Example
Three-Phase Inverter Basics
EV motors are typically three-phase AC motors requiring a three-phase inverter. It consists of six switches arranged in three legs, each leg connected to one motor phase.
Switching sequences create three-phase AC voltages with controlled amplitude and frequency.
Practical Example: Three-Phase Inverter Switching
| Leg | Upper Switch | Lower Switch | Output Phase Voltage |
|---|---|---|---|
| A | S1 | S4 | Phase A |
| B | S3 | S6 | Phase B |
| C | S5 | S2 | Phase C |
By controlling the duty cycle of each switch pair using PWM, the inverter synthesizes sinusoidal AC waveforms.
Mind Map: Three-Phase Inverter Structure
Key Parameters in Inverter Operation
- Switching Frequency: Determines waveform quality and switching losses
- Modulation Index: Ratio of output voltage amplitude to DC bus voltage
- Dead Time: Small delay between switching complementary devices to prevent short circuits
Best Practice: Avoiding Shoot-Through Faults
Shoot-through occurs when both upper and lower switches in a leg are ON simultaneously, causing a short circuit.
Example: Implement dead time insertion in gate driver signals to ensure safe switching.
Summary
Understanding inverter fundamentals—its components, operation modes, and control methods—is vital for designing EV power electronics. Practical examples like single-phase and three-phase inverter switching help solidify these concepts.
For further reading, explore PWM techniques in section 4.2 and inverter thermal management in section 4.3.
4.2 PWM Techniques for Motor Control
Pulse Width Modulation (PWM) is a fundamental technique used in power electronics to control the voltage and current supplied to electric motors in EVs. By adjusting the duty cycle of the PWM signal, we can effectively regulate motor speed, torque, and efficiency.
What is PWM?
PWM involves switching the power devices (like MOSFETs or IGBTs) ON and OFF at a high frequency. The ratio of ON-time to the total switching period is called the duty cycle, which determines the average voltage applied to the motor.
Why Use PWM in Motor Control?
- Efficient control of motor speed and torque
- Reduced power losses compared to linear control
- Precise control of motor current waveform
- Enables regenerative braking
Common PWM Techniques for EV Motor Control
Sinusoidal PWM (SPWM)
SPWM generates PWM signals by comparing a sinusoidal reference voltage with a high-frequency triangular carrier wave.
Example:
- Reference signal frequency = desired motor frequency (e.g., 50 Hz)
- Carrier frequency = switching frequency (e.g., 10 kHz)
Best Practice:
- Choose a carrier frequency high enough to reduce audible noise but within switching device limits.
Example Illustration:
Space Vector PWM (SVPWM)
SVPWM treats the three-phase voltages as vectors in a two-dimensional plane and synthesizes the desired voltage vector by switching between adjacent inverter states.
Advantages:
- Better DC bus voltage utilization (~15% more than SPWM)
- Lower total harmonic distortion (THD)
Example:
- For a three-phase inverter, SVPWM divides the space vector hexagon into six sectors.
- The switching times for each inverter state are calculated to approximate the reference vector.
Best Practice:
- Implement precise timing calculations to minimize switching losses.
Mind Map:
Hysteresis PWM
Hysteresis PWM controls motor current by switching the inverter to keep the current within a hysteresis band around the reference current.
Characteristics:
- Simple to implement
- Variable switching frequency
- Good current control accuracy
Example:
- If motor current exceeds upper hysteresis limit, inverter switches OFF
- If current falls below lower limit, inverter switches ON
Best Practice:
- Use in applications where switching frequency variation is acceptable.
Mind Map:
Carrier-Based PWM
This technique compares a reference waveform with a high-frequency carrier waveform to generate PWM signals.
Example:
- Triangular carrier frequency = 10 kHz
- Reference voltage waveform = sinusoidal at motor frequency
Best Practice:
- Maintain a fixed switching frequency for predictable EMI characteristics.
Mind Map:
Practical Example: Implementing SVPWM for a Three-Phase Motor
Scenario:
- Control a 3-phase induction motor with a 48 V DC bus
- Desired output frequency: 50 Hz
- Switching frequency: 10 kHz
Steps:
- Calculate the reference voltage vector based on desired motor voltage and angle.
- Determine the sector in which the vector lies.
- Calculate the switching times (T1, T2, T0) for adjacent vectors.
- Generate PWM signals for the inverter switches accordingly.
Code Snippet (Pseudo-code):
// Calculate sector
sector = getSector(alpha, beta);
// Calculate T1, T2, T0
calculateSwitchingTimes(Vref, sector, &T1, &T2, &T0);
// Generate PWM signals
generatePWM(T1, T2, T0);
Best Practice:
- Use high-resolution timers for accurate PWM generation.
- Implement dead-time insertion to prevent shoot-through.
Summary
PWM techniques are essential for efficient and precise motor control in EVs. Selecting the appropriate PWM method depends on the application requirements such as switching frequency, harmonic distortion, and implementation complexity.
| PWM Technique | Advantages | Disadvantages | Typical Use Case |
|---|---|---|---|
| Sinusoidal PWM | Simple, smooth output waveform | Lower DC bus utilization | General motor drives |
| Space Vector PWM | Higher voltage utilization, lower THD | More complex implementation | High-performance drives |
| Hysteresis PWM | Simple, accurate current control | Variable switching frequency | Current control applications |
| Carrier-Based PWM | Fixed switching frequency | Moderate harmonic distortion | Standard inverter control |
By mastering these PWM techniques, EV technicians and power engineers can optimize motor performance, improve efficiency, and enhance the driving experience.
4.3 Thermal and Electrical Stress Management
Effective thermal and electrical stress management is critical to ensuring the reliability, efficiency, and longevity of power electronics in EV traction motor inverters. This section explores the sources of stress, mitigation techniques, and practical examples to help engineers design robust inverter systems.
Understanding Thermal Stress in Inverters
Power semiconductor devices such as IGBTs and MOSFETs generate heat due to conduction and switching losses. Excessive heat can degrade device performance or cause failure.
Key Thermal Stress Factors:
- Junction Temperature (Tj): The temperature at the semiconductor junction; must be kept below maximum ratings.
- Thermal Cycling: Repeated heating and cooling causing mechanical fatigue.
- Hot Spots: Localized areas of high temperature due to uneven current distribution.
Electrical Stress in Power Electronics
Electrical stress includes voltage spikes, overcurrent conditions, and switching transients that can damage components or reduce lifespan.
Key Electrical Stress Factors:
- Voltage Overshoot: Caused by parasitic inductances during switching.
- Overcurrent: Due to short circuits or load faults.
- Electrostatic Discharge (ESD): Sudden high-voltage spikes damaging sensitive devices.
Mind Map: Thermal and Electrical Stress Management Overview
Best Practices for Thermal Management
-
Thermal Design and Heat Sinking:
- Use appropriate heat sinks with high thermal conductivity.
- Employ thermal interface materials (TIM) to improve heat transfer.
- Example: Applying a graphite-based TIM between IGBT module and heat sink reduces thermal resistance by 30%.
-
Active Cooling Systems:
- Air cooling with forced fans for moderate power levels.
- Liquid cooling for high-power inverters to maintain junction temperatures below 125°C.
- Example: A liquid-cooled inverter in a commercial EV maintains device temperature at 90°C under full load.
-
Thermal Simulation and Monitoring:
- Use thermal simulation tools (e.g., ANSYS Icepak) during design.
- Integrate temperature sensors near critical components for real-time monitoring.
-
Thermal Cycling Mitigation:
- Design for gradual temperature changes.
- Use materials with matched coefficients of thermal expansion.
Mind Map: Thermal Management Best Practices
Best Practices for Electrical Stress Management
-
Snubber Circuits:
- Use RC or RCD snubbers to suppress voltage spikes caused by switching.
- Example: Adding an RC snubber across the IGBT reduces voltage overshoot from 600 V to 450 V.
-
Gate Drive Optimization:
- Control gate resistor values to balance switching speed and voltage overshoot.
- Example: Increasing gate resistor from 10 Ω to 20 Ω reduces EMI without significant switching loss increase.
-
Overcurrent Protection:
- Implement fast-acting fuses or electronic current limiting.
- Use current sensors and feedback to shut down inverter on fault detection.
-
ESD Protection:
- Use transient voltage suppression (TVS) diodes at sensitive inputs.
-
PCB Layout Optimization:
- Minimize parasitic inductances by shortening high-current loops.
- Use proper grounding and shielding techniques.
Mind Map: Electrical Stress Management Best Practices
Practical Example: Thermal and Electrical Stress Management in a Three-Phase Inverter
Scenario: Designing an inverter module for a 50 kW EV traction motor.
-
Thermal Management:
- Selected IGBT modules rated for 150°C junction temperature.
- Employed liquid cooling with cold plates and a high-performance TIM.
- Integrated NTC thermistors near IGBT junctions for temperature monitoring.
- Thermal simulation predicted max junction temperature of 110°C under peak load.
-
Electrical Stress Management:
- Designed RC snubber circuits across each IGBT to limit voltage spikes.
- Optimized gate drive resistors to 15 Ω for balanced switching speed and EMI.
- Included fast-acting fuses and current sensors for overcurrent detection.
- PCB layout minimized loop areas and used multi-layer ground planes.
Outcome:
- The inverter operated reliably during extensive testing with no thermal shutdowns.
- Voltage overshoot was limited to safe levels, preventing device damage.
- EMI emissions met automotive standards.
Summary
Thermal and electrical stress management is essential for robust inverter design in EVs. Combining proper thermal design, active cooling, snubber circuits, optimized gate driving, and careful PCB layout ensures improved reliability and performance. Practical examples demonstrate how these principles are applied in real-world inverter systems.
4.4 Integration with Motor Controllers and Sensors
Integrating power electronics inverters with motor controllers and sensors is a critical step in ensuring efficient, reliable, and precise control of electric vehicle (EV) traction motors. This section covers the key concepts, best practices, and practical examples to help you understand and implement this integration effectively.
Key Concepts
- Motor Controller Role: The motor controller acts as the brain of the traction system, interpreting commands from the vehicle control unit and generating appropriate PWM signals to the inverter.
- Sensors Role: Sensors provide real-time feedback on motor parameters such as speed, position, and current, enabling closed-loop control.
- Communication Interfaces: Integration requires robust communication protocols between the inverter, motor controller, and sensors.
Mind Map: Integration Overview
Best Practices for Integration
-
Sensor Selection and Placement
- Use Hall effect sensors or encoders for rotor position feedback to enable precise vector control.
- Place current sensors close to the motor terminals for accurate current measurement.
- Include temperature sensors on power devices to prevent thermal damage.
-
Signal Conditioning and Filtering
- Implement low-pass filters to reduce noise from sensor signals.
- Use differential signaling where possible to improve noise immunity.
-
Communication Protocols
- Employ CAN bus for robust and real-time communication between motor controller and inverter.
- Ensure proper termination and shielding of communication lines to minimize EMI.
-
Synchronization and Timing
- Synchronize sensor data acquisition with PWM switching to avoid measurement errors.
- Use interrupts or DMA channels in microcontrollers for timely sensor data processing.
-
Fault Detection and Safety
- Monitor sensor signals for faults (e.g., open circuits, short circuits).
- Implement fallback strategies in motor controller firmware for sensor failure scenarios.
Practical Example: Integrating a Three-Phase Inverter with a Vector Motor Controller and Sensors
Scenario: You are designing an EV traction system using a three-phase inverter controlled by a vector control algorithm. The system uses Hall effect sensors for rotor position and shunt resistors for current sensing.
Step 1: Sensor Interface Design
- Connect Hall sensors to microcontroller digital inputs with debounce filters.
- Use differential amplifiers to condition shunt resistor voltage signals.
Step 2: Motor Controller Implementation
- Implement Space Vector PWM (SVPWM) based on rotor position feedback.
- Use current feedback to regulate torque and protect against overcurrent.
Step 3: Communication Setup
- Use CAN bus to send motor status and receive commands from the vehicle control unit.
Step 4: Synchronization
- Align ADC sampling of current sensors with PWM switching edges to minimize noise.
Step 5: Fault Handling
- Detect sensor signal loss and trigger safe shutdown or limp mode.
Mind Map: Practical Integration Example
Additional Example: Using Encoders and SPI Communication
Context: For higher precision, an optical encoder is used for rotor position feedback, communicating via SPI.
- Connect encoder SPI signals (MISO, MOSI, SCK, CS) to microcontroller SPI peripheral.
- Implement interrupt-driven SPI data reading synchronized with PWM cycles.
- Use encoder data to calculate rotor speed and position for field-oriented control.
Best Practice: Shield SPI lines and use twisted pair cables to reduce EMI.
Summary
Integrating power electronics with motor controllers and sensors demands careful consideration of sensor types, signal conditioning, communication protocols, and synchronization. Following best practices ensures accurate motor control, improved efficiency, and enhanced system reliability.
References and Further Reading
- “Electric Vehicle Technology Explained” by James Larminie and John Lowry
- Texas Instruments Application Notes on Motor Control
- Microchip Motor Control Solutions Documentation
4.5 Practical Example: Implementing Space Vector PWM for a Three-Phase Motor
Introduction
Space Vector Pulse Width Modulation (SVPWM) is a sophisticated and efficient technique used to control three-phase inverters driving AC motors, such as those in electric vehicles (EVs). It optimizes the inverter output voltage, reduces harmonic distortion, and improves motor performance compared to traditional sinusoidal PWM.
What is Space Vector PWM?
SVPWM treats the three-phase voltages as a single vector in a two-dimensional plane (α-β plane) using Clarke transformation. It synthesizes the desired voltage vector by switching between the inverter’s discrete voltage states.
Mind Map: Overview of SVPWM
Step-by-Step Implementation
-
Transform three-phase reference voltages to α-β plane
- Use Clarke transformation: \[ \begin{bmatrix} V_\alpha \\ V_\beta \end{bmatrix} = \frac{2}{3} \begin{bmatrix} 1 & -\frac{1}{2} & -\frac{1}{2} \\ 0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2} \end{bmatrix} \begin{bmatrix} V_a \\ V_b \\ V_c \end{bmatrix} \]
-
Calculate the magnitude and angle of the reference voltage vector
- Magnitude: \(V_{ref} = \sqrt{V_\alpha^2 + V_\beta^2}\)
- Angle: \(\theta = \arctan2(V_\beta, V_\alpha)\)
-
Determine the sector (1 to 6) in which the vector lies
- Divide the 360° plane into 6 sectors of 60° each
-
Calculate the time durations for the two adjacent active vectors and zero vectors
- Use the equations: \[ T_1 = T_s \cdot V_{ref} \cdot \sin(\pi/3 - \theta_s) / V_{dc} \] \[ T_2 = T_s \cdot V_{ref} \cdot \sin(\theta_s) / V_{dc} \] where \(\theta_s\) is the angle within the sector, \(T_s\) is the switching period, and \(V_{dc}\) is the DC bus voltage.
-
Generate switching signals for the inverter legs
- Apply the calculated times to the corresponding voltage vectors
- Insert zero vectors to fill the switching period
-
Convert switching times to PWM duty cycles
Mind Map: SVPWM Implementation Flow
Example: Calculating SVPWM Duty Cycles
Given:
- DC bus voltage, \(V_{dc} = 300V\)
- Switching period, \(T_s = 100 \mu s\)
- Reference phase voltages:
- \(V_a = 150V\)
- \(V_b = -75V\)
- \(V_c = -75V\)
Step 1: Clarke Transformation
\[ V_\alpha = \frac{2}{3} (V_a - \frac{1}{2} V_b - \frac{1}{2} V_c) = \frac{2}{3} (150 - (-37.5) - (-37.5)) = \frac{2}{3} (150 + 75) = 150V \]
\[ V_\beta = \frac{2}{3} (0 + \frac{\sqrt{3}}{2} V_b - \frac{\sqrt{3}}{2} V_c) = \frac{2}{3} (0 + \frac{\sqrt{3}}{2} (-75) - \frac{\sqrt{3}}{2} (-75)) = 0V \]
Step 2: Magnitude and Angle
\[ V_{ref} = \sqrt{150^2 + 0^2} = 150V \]
\[ \theta = \arctan2(0, 150) = 0^\circ \]
Step 3: Sector Determination
- \(\theta = 0^\circ\) lies in Sector 1 (0° to 60°)
Step 4: Calculate \(T_1\) and \(T_2\)
\[ \theta_s = \theta - (sector - 1) \times 60^\circ = 0^\circ \]
\[ T_1 = T_s \times \frac{V_{ref}}{V_{dc}} \times \sin(60^\circ - 0^\circ) = 100 \times 10^{-6} \times \frac{150}{300} \times \sin(60^\circ) \approx 43.3 \mu s \]
\[ T_2 = T_s \times \frac{V_{ref}}{V_{dc}} \times \sin(0^\circ) = 0 \]
\[ T_0 = T_s - T_1 - T_2 = 100 \mu s - 43.3 \mu s - 0 = 56.7 \mu s \]
Step 5: PWM Duty Cycles
-
The zero vector time \(T_0\) is split equally before and after active vectors.
-
Duty cycle for phase A, B, C can be calculated based on switching sequence for Sector 1.
Mind Map: Sector 1 Switching States
Practical Tips and Best Practices
- Use fixed-point or floating-point arithmetic carefully to maintain precision in embedded controllers.
- Implement dead-time insertion to avoid shoot-through in inverter switches.
- Validate switching signals with an oscilloscope to confirm correct timing.
- Start with simulation tools like MATLAB/Simulink to verify SVPWM logic before hardware implementation.
- Consider thermal effects on switching devices due to high-frequency PWM.
Summary
This example demonstrated the step-by-step process of implementing SVPWM for a three-phase motor inverter. By calculating the reference voltage vector, determining the sector, and computing the switching times, you can generate optimized PWM signals that improve motor efficiency and reduce harmonics.
Additional Resources
- MATLAB/Simulink SVPWM tutorials
- Power Electronics textbooks covering SVPWM
- Open-source SVPWM code repositories for microcontrollers
This practical example equips EV technicians and power engineers with a clear understanding and actionable steps to implement SVPWM in electric vehicle motor drives.
5. Battery Management Systems and Power Electronics Integration
5.1 Role of Power Electronics in Battery Management
Power electronics play a pivotal role in Battery Management Systems (BMS) for electric vehicles (EVs). The BMS ensures safe, efficient, and reliable operation of the battery pack by monitoring, controlling, and protecting the battery cells. Power electronics enable the precise control of charging and discharging currents, voltage balancing, and fault protection, which are critical for maximizing battery life and performance.
Key Functions of Power Electronics in Battery Management:
- Voltage Regulation: Ensures each cell or module operates within safe voltage limits.
- Current Control: Manages charging and discharging current to prevent overcurrent conditions.
- Cell Balancing: Equalizes the state of charge (SOC) among cells to avoid capacity loss.
- Protection: Detects and isolates faults such as overvoltage, undervoltage, overcurrent, and temperature extremes.
- Communication: Interfaces with the vehicle control unit for real-time data exchange.
Mind Map: Role of Power Electronics in BMS
Practical Example: Using a Bidirectional DC-DC Converter for Cell Balancing
One common power electronics approach in BMS is to use a bidirectional DC-DC converter to actively balance cells by transferring energy from higher charged cells to lower charged ones, improving efficiency compared to passive balancing.
Example Scenario:
- Setup: A battery pack with 4 cells exhibiting different SOC levels.
- Goal: Balance the cells to equal SOC without wasting energy as heat.
- Implementation:
- Use a bidirectional converter connected between cells.
- When a cell voltage exceeds a threshold, the converter transfers energy to a cell with lower voltage.
- The converter operates under control algorithms that monitor cell voltages and decide when and how much energy to transfer.
Benefits:
- Improved battery capacity utilization.
- Reduced heat generation compared to resistive balancing.
- Extended battery life.
Mind Map: Active Cell Balancing Using Power Electronics
Additional Example: Power Electronics in Charge Control
Power electronics regulate the charging current and voltage to optimize battery health.
- Constant Current (CC) Mode: Power electronics maintain a fixed current during initial charging.
- Constant Voltage (CV) Mode: After reaching a voltage threshold, power electronics regulate voltage while current tapers down.
Example:
A DC-DC converter controlled by the BMS adjusts the charging current dynamically:
- Initially, it provides a steady current to rapidly charge the battery.
- As the battery voltage approaches the maximum limit, the converter switches to voltage regulation mode.
- This prevents overcharging and thermal stress.
Summary
Power electronics are the backbone of modern battery management systems, enabling precise control over charging, discharging, balancing, and protection. Through advanced converter topologies and control strategies, power electronics help maximize battery efficiency, safety, and longevity.
References and Further Reading
- “Battery Management Systems: Design by Modelling” by H.J. Bergveld et al.
- Texas Instruments Application Notes on Battery Management Power Electronics
- Practical tutorials on bidirectional DC-DC converters for battery balancing
5.2 Balancing Techniques and Charge Control
Battery management systems (BMS) play a crucial role in ensuring the longevity, safety, and performance of electric vehicle (EV) batteries. One of the key functions of a BMS is cell balancing, which ensures that all cells in a battery pack maintain similar state-of-charge (SoC) levels to prevent overcharging or deep discharging of individual cells.
Why Balancing is Important
- Cells in a battery pack have slight variations in capacity, internal resistance, and self-discharge rates.
- Without balancing, some cells may reach full charge earlier and get overcharged, while others remain undercharged.
- Over time, this imbalance reduces the usable capacity and can cause safety issues.
Types of Cell Balancing Techniques
Passive Balancing
- Principle: Excess energy from higher charged cells is dissipated as heat through resistors.
- Best Practice: Use low-power resistors and implement balancing only when cells exceed a certain voltage threshold to minimize energy loss.
- Example: In a 48V EV battery pack with 16 cells in series, the BMS monitors each cell voltage. When a cell reaches 4.2V, the balancing resistor is switched on to bleed off excess charge until the cell voltage matches others.
Active Balancing
-
Principle: Energy is transferred from higher charged cells to lower charged cells, improving overall efficiency.
-
Techniques:
- Capacitive Balancing: Uses capacitors to shuttle charge between cells.
- Inductive Balancing: Uses inductors and switches to transfer energy.
- Switched Capacitor Balancing: Uses capacitors and switches in a controlled sequence.
-
Best Practice: Select active balancing for large battery packs or applications where energy efficiency is critical.
-
Example: An EV battery pack uses inductive balancing where a small inductor and MOSFET switches transfer charge from a fully charged cell to a less charged one, reducing heat dissipation and improving range.
Charge Control Strategies
Charge control complements balancing by managing the charging current and voltage to optimize battery health.
Constant Current / Constant Voltage (CC/CV) Charging
-
CC Phase: Battery is charged at a fixed current until it reaches the target voltage.
-
CV Phase: Voltage is held constant while current gradually decreases.
-
Best Practice: Implement precise voltage and current sensing to smoothly transition between CC and CV phases.
-
Example: A 400V EV battery pack charges at 50A (CC) until 4.2V per cell is reached, then voltage is held at 4.2V while current tapers off.
Pulse Charging
-
Charging current is applied in pulses with rest intervals.
-
Helps reduce battery heating and allows chemical reactions to stabilize.
-
Example: A BMS applies 5-second charging pulses followed by 2-second rests during the CV phase to extend battery life.
Temperature Compensation
-
Charging parameters are adjusted based on battery temperature.
-
Prevents overcharging in high temperatures and undercharging in cold conditions.
-
Example: When battery temperature exceeds 45°C, the BMS reduces charging current by 20% to prevent thermal runaway.
Practical Example: Designing a Battery Balancer Using DC-DC Converters
Scenario: A 96V EV battery pack with 24 cells in series requires active balancing to improve efficiency.
Design Steps:
- Use small isolated DC-DC converters to transfer charge from higher voltage cells to lower voltage cells.
- Implement voltage sensing on each cell to detect imbalance.
- Control converters via a microcontroller to activate balancing only when cell voltage difference exceeds 20mV.
- Include thermal sensors to monitor converter temperature and prevent overheating.
Outcome: This design reduces energy loss compared to passive balancing and extends battery life by maintaining uniform cell voltages.
Summary
- Cell balancing is essential for battery health and safety.
- Passive balancing is simple but less efficient; active balancing is more complex but conserves energy.
- Charge control strategies like CC/CV, pulse charging, and temperature compensation optimize charging and protect battery cells.
- Practical designs often combine balancing and charge control for best results.
References & Further Reading:
- Battery Management Systems: Design by Gregory L. Plett
- Texas Instruments Application Notes on Battery Balancing
- IEEE Papers on Active Balancing Techniques
5.3 Safety and Fault Detection Mechanisms
Safety and fault detection are critical aspects of Battery Management Systems (BMS) in electric vehicles (EVs). Ensuring the safe operation of batteries not only protects the vehicle and passengers but also prolongs battery life and maintains performance.
Key Safety Concerns in Battery Systems
- Overvoltage and undervoltage
- Overcurrent and short circuits
- Overtemperature and thermal runaway
- Cell imbalance
- Mechanical damage and internal faults
Mind Map: Safety and Fault Detection Mechanisms in BMS
Voltage Monitoring
Overvoltage Protection: Prevents charging beyond the maximum voltage limit of each cell to avoid damage.
Undervoltage Protection: Prevents deep discharge which can degrade battery capacity.
Example: A BMS continuously measures each cell voltage using ADCs. If any cell voltage exceeds 4.2 V (typical max for Li-ion), the BMS signals the charger to stop charging.
Current Monitoring
Overcurrent Detection: Detects excessive current during charging or discharging that could cause damage or fire.
Short Circuit Protection: Rapidly disconnects the battery in case of a short circuit.
Example: Using a Hall-effect current sensor, the BMS monitors current flow. If current exceeds 100 A (example threshold), the BMS triggers a relay to disconnect the battery.
Temperature Monitoring
Overtemperature Detection: Uses temperature sensors (e.g., NTC thermistors) to monitor cell and pack temperature.
Thermal Runaway Prevention: If temperature rises rapidly or exceeds safe limits, the BMS initiates cooling or shutdown.
Example: Multiple NTC sensors placed on battery cells feed temperature data to the BMS. If temperature exceeds 60°C, charging is halted and cooling fans activated.
Cell Balancing
Passive Balancing: Dissipates excess energy from higher voltage cells as heat to equalize voltages.
Active Balancing: Transfers charge from higher voltage cells to lower voltage cells for efficiency.
Example: A passive balancing circuit uses resistors controlled by MOSFET switches to bleed off excess charge from cells above 4.1 V.
Fault Diagnosis
Open Circuit Detection: Detects disconnected or damaged cells by monitoring voltage inconsistencies.
Internal Short Circuit Detection: Identifies cells with abnormal voltage drops or temperature spikes.
Example: If a cell voltage suddenly drops to near zero while others remain stable, the BMS flags an open circuit fault.
Communication and Alerts
Fault Reporting: BMS communicates faults to the vehicle control unit (VCU) or user interface.
Emergency Shutdown: In critical faults, the BMS can isolate the battery pack by opening contactors.
Example: When a fault is detected, the BMS sends a CAN bus message to the VCU and activates a relay to disconnect the battery.
Practical Example: Designing a Fault Detection Circuit for Overcurrent Protection
Components:
- Hall-effect current sensor (e.g., ACS712)
- Microcontroller ADC input
- Relay or MOSFET for disconnect
Operation:
- The current sensor outputs an analog voltage proportional to current.
- The microcontroller samples this voltage continuously.
- If current exceeds preset threshold (e.g., 100 A), the microcontroller triggers the relay to disconnect the battery.
- The system logs the fault and sends an alert via CAN bus.
Code Snippet (Pseudo):
int current = readADC();
if(current > MAX_CURRENT_THRESHOLD) {
disconnectBattery();
sendFaultMessage("Overcurrent Detected");
}
Summary
Implementing robust safety and fault detection mechanisms in EV battery management requires continuous monitoring of voltage, current, temperature, and cell balance. Combining hardware sensors with intelligent control algorithms ensures early fault detection and safe operation. Practical examples, such as overcurrent protection circuits, demonstrate how these principles are applied in real systems.
5.4 Practical Example: Designing a Battery Balancer Using DC-DC Converters
Battery balancing is critical in electric vehicles (EVs) to ensure uniform charge levels across all cells in a battery pack, prolong battery life, and maintain safety. This section walks through designing a practical battery balancer using DC-DC converters, integrating best practices and clear examples.
What is Battery Balancing?
Battery balancing equalizes the state of charge (SoC) among individual cells in a battery pack. Without balancing, cells with higher charge can degrade faster or cause safety issues.
Types of Battery Balancing
- Passive Balancing: Dissipates excess energy as heat using resistors.
- Active Balancing: Transfers energy between cells using power electronics (e.g., DC-DC converters).
Active balancing is more efficient and preferred in modern EVs.
Mind Map: Battery Balancing Overview
Why Use DC-DC Converters for Balancing?
- Efficient energy transfer between cells.
- Ability to step-up or step-down voltage.
- Controlled charge/discharge cycles.
Design Considerations for a DC-DC Based Battery Balancer
- Topology: Choose between isolated or non-isolated converters.
- Switching Frequency: Balance between efficiency and size.
- Control Strategy: Voltage/current regulation and cell monitoring.
- Thermal Management: Ensure components operate within safe temperature.
Mind Map: DC-DC Battery Balancer Design Factors
Step-by-Step Example: Designing a Buck-Boost DC-DC Balancer for a 4-Cell Li-ion Pack
Objective: Balance cells in a 4-cell series Li-ion battery pack (3.7 V nominal per cell).
Step 1: Understand Cell Voltage Range
- Minimum voltage: 3.0 V
- Maximum voltage: 4.2 V
Step 2: Select Converter Topology
- Buck-boost converter chosen for flexibility (can step up or down).
Step 3: Key Component Selection
- MOSFET with low Rds(on) for efficiency.
- Inductor rated for peak current plus margin.
- Capacitors with low ESR for smoothing.
Step 4: Control Strategy
- Measure individual cell voltages using ADC.
- If a cell voltage > average voltage, converter transfers energy from that cell to others.
- Use PWM to regulate current flow.
Step 5: Implement Protection
- Overcurrent protection via sensing resistors.
- Thermal shutdown using temperature sensors.
Step 6: Thermal Design
- Heat sinks on MOSFETs.
- PCB layout optimized for heat dissipation.
Step 7: Testing and Validation
- Simulate converter behavior with MATLAB/Simulink.
- Prototype on a test bench with dummy loads.
Mind Map: Buck-Boost Balancer Design Flow
Practical Example Code Snippet (Pseudo-code) for Control Logic
// Assume cellVoltages[] holds voltages of 4 cells
float averageVoltage = 0;
for(int i=0; i<4; i++) {
averageVoltage += cellVoltages[i];
}
averageVoltage /= 4;
for(int i=0; i<4; i++) {
if(cellVoltages[i] > averageVoltage + 0.01) { // 10mV threshold
// Enable buck mode to discharge cell i
enableBuckConverter(i);
} else if(cellVoltages[i] < averageVoltage - 0.01) {
// Enable boost mode to charge cell i
enableBoostConverter(i);
} else {
// Cell balanced, disable converter
disableConverter(i);
}
}
Example: Real-World Application
Tesla’s battery management system uses active balancing with DC-DC converters to maintain cell uniformity, improving battery longevity and safety.
Summary Best Practices
- Use active balancing for higher efficiency.
- Monitor cell voltages continuously with high accuracy.
- Implement robust control algorithms with hysteresis to avoid oscillations.
- Design for thermal dissipation and protection.
- Prototype and simulate before final implementation.
This practical example demonstrates how DC-DC converters can be effectively used to balance battery cells in EVs, ensuring optimal performance and safety.
6. Onboard Charging Systems and Power Electronics
6.1 Overview of Onboard Chargers
Onboard chargers (OBCs) are critical components in electric vehicles (EVs) that convert alternating current (AC) from the grid into direct current (DC) to charge the vehicle’s battery. They are integrated within the vehicle, enabling charging anywhere an AC power source is available.
What is an Onboard Charger?
- Converts AC input (typically 110V or 220V) to DC output suitable for battery charging.
- Controls charging current and voltage to optimize battery health and charging speed.
- Interfaces with the vehicle’s Battery Management System (BMS) for safe and efficient charging.
Key Functions of Onboard Chargers
- AC to DC Conversion: Rectification and power factor correction.
- Voltage and Current Regulation: Ensures battery receives correct charging profile.
- Communication: Exchanges data with EV control systems and external charging stations.
- Safety: Implements protections against overcurrent, overvoltage, and thermal issues.
Mind Map: Onboard Charger Core Components
Types of Onboard Chargers
| Charger Type | Description | Typical Power Range | Example Use Case |
|---|---|---|---|
| Single-Phase Charger | Uses single-phase AC input, simpler design | 3.3 kW - 7.2 kW | Residential charging, low power |
| Three-Phase Charger | Uses three-phase AC input, higher power capability | 11 kW - 22 kW | Commercial or fast home charging |
Practical Example: Basic Single-Phase Onboard Charger Workflow
- AC Input: Vehicle plugged into a 230V AC outlet.
- EMI Filtering: Removes noise from the power line to protect sensitive electronics.
- Rectification: Converts AC to DC using a diode bridge.
- Power Factor Correction: Boost converter adjusts input current waveform to reduce harmonics and improve efficiency.
- DC-DC Conversion: Steps down or regulates voltage to match battery charging requirements.
- Control and Communication: Microcontroller monitors voltage, current, temperature, and communicates with BMS.
- Safety Checks: Overcurrent and thermal sensors ensure safe operation.
Mind Map: Charging Process Flow
Best Practices for Onboard Charger Design
- Efficiency Optimization: Use synchronous rectification and high-frequency switching to reduce losses.
- Thermal Management: Incorporate heat sinks and consider airflow paths to maintain component reliability.
- EMI Compliance: Design EMI filters and PCB layouts carefully to meet regulatory standards.
- Modularity: Design chargers with modular components for easier maintenance and upgrades.
Example: Simplified Onboard Charger Circuit
- Input: 230VAC from wall outlet
- EMI Filter: LC filter to reduce noise
- Rectifier: Full-bridge diode rectifier
- PFC Stage: Boost converter controlled by a microcontroller to maintain unity power factor
- DC-DC Stage: Isolated converter (e.g., flyback or LLC resonant) to provide regulated battery voltage
- Control: MCU monitors voltage/current, communicates with BMS via CAN bus
This example demonstrates a typical architecture used in many EV onboard chargers, balancing cost, efficiency, and safety.
Summary
Onboard chargers are essential for converting grid AC power into a controlled DC charge for EV batteries. Understanding their components, operation, and best practices is crucial for electrical engineering students, EV technicians, and power engineers working in electric transportation. Practical examples and mind maps help visualize the complex processes involved, making design and troubleshooting more approachable.
6.2 AC-DC Conversion and Power Factor Correction
Introduction
AC-DC conversion is a fundamental process in onboard EV chargers, transforming the grid’s alternating current (AC) into direct current (DC) suitable for battery charging. Power Factor Correction (PFC) ensures that the charger draws current efficiently from the grid, minimizing reactive power and harmonics, which improves system efficiency and complies with grid standards.
AC-DC Conversion Basics
- Rectification: Converts AC voltage to pulsating DC.
- Filtering: Smooths the pulsating DC to a more constant DC voltage.
- Regulation: Maintains stable output voltage/current for battery charging.
Common Rectifier Types:
- Diode Bridge Rectifier: Simple, robust, but non-controlled output.
- Controlled Rectifiers (SCRs): Allow output voltage control but more complex.
Power Factor Correction (PFC) Overview
-
Why PFC?
- Reduces reactive power drawn from the grid.
- Minimizes harmonic distortion.
- Improves efficiency and reduces utility penalties.
-
Types of PFC:
- Passive PFC: Uses inductors and capacitors; simple but limited performance.
- Active PFC: Uses power electronics (typically boost converters) and control algorithms for near-unity power factor.
Mind Map: AC-DC Conversion and PFC Components
Best Practices for AC-DC Conversion and PFC in EV Chargers
-
Use Active PFC for Compliance and Efficiency:
- Active PFC circuits can achieve power factors >0.95, meeting international standards (e.g., IEC 61000-3-2).
-
Select Appropriate Switching Frequency:
- Balance between efficiency, size of passive components, and EMI.
- Typical PFC boost converters operate between 50 kHz to 150 kHz.
-
Implement Robust Control Algorithms:
- Current mode control is preferred for fast response and stability.
-
Thermal Management:
- Ensure adequate cooling for power semiconductors and inductors.
-
EMI Mitigation:
- Use proper filtering and PCB layout techniques to reduce noise.
Practical Example: Designing an Active PFC Stage for a Single-Phase Onboard Charger
Scenario: Design an active PFC boost converter stage for a 3.3 kW onboard charger operating from a 230 VAC single-phase supply.
Step 1: Input Parameters
- Input voltage (RMS): 230 V
- Output voltage: 400 V DC (typical battery bus voltage)
- Power: 3.3 kW
Step 2: Rectification
- Use a diode bridge to convert AC to pulsating DC.
Step 3: Boost Converter Design
- Boost converter raises the rectified voltage to 400 V DC.
- Select switching frequency: 100 kHz (balance efficiency and size).
- Calculate inductor value for Continuous Conduction Mode (CCM).
Step 4: Control Strategy
- Implement current mode control to shape input current sinusoidally, in phase with input voltage.
Step 5: Power Factor and Efficiency
- Target power factor >0.95.
- Efficiency goal: >95%.
Step 6: Filtering and EMI
- Add EMI filters on input side.
- Use snubber circuits to protect switches.
Step 7: Thermal Management
- Heat sinks and/or liquid cooling for MOSFETs and diode bridge.
Mind Map: Active PFC Boost Converter Design Steps
Additional Example: Simple Passive PFC Implementation
Scenario: A low-cost onboard charger uses a passive PFC circuit with an inductor and capacitor to improve power factor.
Explanation:
- The inductor smooths input current but cannot fully correct power factor.
- This approach is simpler but results in power factor around 0.7-0.85.
- Suitable for low-power chargers where cost is critical.
Example Circuit:
- Diode bridge rectifier followed by an LC filter.
Limitations:
- Larger passive components increase size and weight.
- Less effective at reducing harmonics.
Summary
AC-DC conversion and power factor correction are critical for efficient and compliant onboard EV chargers. Active PFC using boost converters and advanced control strategies is the industry best practice, ensuring near-unity power factor, low harmonic distortion, and high efficiency. Understanding these concepts and applying best practices enables the design of reliable and high-performance charging systems.
6.3 Thermal Management and Reliability Considerations
Effective thermal management is critical in onboard charging systems for electric vehicles (EVs) to ensure reliability, efficiency, and longevity of power electronic components. Poor thermal design can lead to premature failures, reduced performance, and safety hazards.
Key Thermal Management Challenges in Onboard Chargers
- High power density leading to significant heat generation
- Limited space within the vehicle for cooling solutions
- Variable environmental conditions (temperature, humidity)
- Continuous operation during charging cycles
Thermal Management Strategies
- Heat Sinks: Passive components that dissipate heat via conduction and convection.
- Forced Air Cooling: Use of fans or blowers to increase airflow over components.
- Liquid Cooling: Circulation of coolant through cold plates or channels to remove heat efficiently.
- Thermal Interface Materials (TIMs): Improve heat transfer between components and heat sinks.
- Thermal Design Optimization: Layout and placement of components to minimize hotspots.
Mind Map: Thermal Management Techniques
Reliability Considerations
- Component Derating: Operating components below their maximum ratings to reduce stress.
- Thermal Cycling: Repeated heating and cooling can cause mechanical fatigue.
- Humidity and Contamination: Affect insulation and corrosion resistance.
- Monitoring and Protection: Use of temperature sensors and thermal shutdown circuits.
Mind Map: Reliability Factors in Thermal Management
Practical Example: Designing Thermal Management for a Single-Phase Onboard Charger
Scenario: A 7.2 kW onboard charger with a compact design needs efficient thermal management to maintain component temperatures below 85°C.
Step 1: Identify Heat Sources
- Power semiconductors (IGBTs, MOSFETs)
- Transformer losses
- Passive components (resistors, capacitors)
Step 2: Calculate Heat Dissipation
- Use datasheets to find power loss per component.
- Sum total heat to be dissipated.
Step 3: Select Cooling Method
- Passive heat sinks combined with forced air cooling due to space constraints.
Step 4: Thermal Interface Materials
- Use high-quality TIMs between semiconductors and heat sinks to improve conduction.
Step 5: Layout Optimization
- Place high-loss components near cooling airflow paths.
- Separate heat-sensitive components.
Step 6: Implement Temperature Monitoring
- Place thermistors near critical components.
- Integrate thermal shutdown in control firmware.
Step 7: Validate with Thermal Simulation
- Use software like ANSYS Icepak or COMSOL Multiphysics to simulate temperature distribution.
Step 8: Prototype Testing
- Measure temperatures under various load conditions.
- Adjust cooling strategy if needed.
Additional Tips and Best Practices
- Always design with a safety margin for temperature rise.
- Consider the impact of dust and debris on cooling efficiency.
- Use conformal coatings to protect against moisture.
- Regularly update thermal models based on real-world testing.
By integrating these thermal management and reliability considerations, onboard chargers can achieve higher efficiency, longer service life, and safer operation in electric vehicles.
6.4 Practical Example: Designing a Single-Phase Onboard Charger
Designing a single-phase onboard charger (OBC) for electric vehicles is a critical task that requires a deep understanding of power electronics, control strategies, and thermal management. This section walks through a practical example, integrating best practices and easy-to-understand examples.
Step 1: Define Charger Specifications
- Input Voltage: 230 VAC (single-phase)
- Output Voltage: 400 VDC (typical EV battery pack voltage)
- Output Power: 7.2 kW (typical Level 2 charger)
- Charging Current: 18 A (approximate)
- Efficiency Target: > 93%
- Power Factor: > 0.95
Step 2: Charger Topology Selection
The most common topology for a single-phase onboard charger is a two-stage converter:
- AC-DC Stage: Boost PFC (Power Factor Correction) converter to convert 230 VAC to a regulated DC bus voltage.
- DC-DC Stage: Isolated DC-DC converter (typically a full-bridge or half-bridge) to step down/up and regulate the battery charging voltage.
Mind Map: Single-Phase Onboard Charger Architecture
Step 3: AC Input and EMI Filtering
- Use an EMI filter to reduce conducted noise and comply with EMC standards.
- Example: LC low-pass filter with common-mode chokes.
Example:
- Input EMI filter designed with 10 mH common-mode choke and 0.1 uF Y-capacitors.
Step 4: Rectification and Power Factor Correction
- Use a full-bridge diode rectifier to convert AC to unregulated DC.
- Implement a boost PFC converter to regulate the DC bus voltage and improve power factor.
Best Practice:
- Use continuous conduction mode (CCM) boost converter for stable operation.
- Implement average current mode control for PFC to maintain power factor > 0.95.
Example:
- Boost inductor: 500 uH rated for 20 A.
- Switching frequency: 100 kHz.
Step 5: Isolated DC-DC Converter Design
- Use a full-bridge topology with a high-frequency transformer for galvanic isolation.
- Implement synchronous rectification on the secondary side to improve efficiency.
Best Practice:
- Select transformer with appropriate turns ratio to match battery voltage.
- Use SiC MOSFETs for high efficiency and reduced switching losses.
Example:
- Transformer turns ratio: 10:1 (primary:secondary).
- Switching frequency: 50 kHz.
Step 6: Control Strategy
- Use digital control (e.g., microcontroller or DSP) to manage PFC and DC-DC stages.
- Implement closed-loop voltage and current control for precise battery charging.
Example:
- PID controller for output voltage regulation.
- Average current mode control for PFC stage.
Step 7: Thermal Management
- Calculate power losses in semiconductors and passive components.
- Design heat sinks and cooling systems accordingly.
Example:
- MOSFET junction temperature estimated at 90°C under full load.
- Use aluminum heat sink with thermal resistance of 1.5 °C/W.
Mind Map: Control Loop Overview
Step 8: Safety and Protection Features
- Include overcurrent, overvoltage, and thermal protection.
- Implement isolation monitoring and ground fault detection.
Example:
- Use a shunt resistor and comparator for overcurrent detection.
- Thermal sensors placed near MOSFETs for temperature monitoring.
Summary Table: Key Component Selection
| Component | Specification | Example Part |
|---|---|---|
| Input EMI Filter | 10 mH choke, 0.1 uF Y-cap | TDK Common Mode Choke |
| Rectifier Bridge | 25 A, 600 V Diode Bridge | Infineon IDW60G65C6 |
| Boost Inductor | 500 uH, 20 A | Coilcraft XAL5030 |
| PFC MOSFET | 650 V, 30 A SiC MOSFET | Wolfspeed C3M0065090K |
| Transformer | 10:1 turns ratio, 50 kHz | Custom Wound Transformer |
| DC-DC MOSFETs | 650 V, 40 A SiC MOSFET | Infineon CoolSiC MOSFET |
| Controller | 32-bit MCU with PWM and ADC | TI C2000 Series |
Final Notes
Designing a single-phase onboard charger involves balancing efficiency, cost, size, and reliability. By following the outlined steps and best practices, engineers can create robust and efficient chargers suitable for modern EVs.
This example integrates practical design considerations, component selection, and control strategies, providing a comprehensive guide for students, technicians, and engineers working in EV power electronics.
7. Fast Charging Infrastructure Power Electronics
7.1 High-Power DC Fast Charging Architectures
High-power DC fast charging is a critical enabler for widespread electric vehicle (EV) adoption, providing rapid energy replenishment and minimizing downtime. This section explores the architectures behind these chargers, highlighting design principles, components, and practical examples.
Overview of High-Power DC Fast Charging
High-power DC fast chargers typically deliver power levels ranging from 50 kW up to 350 kW or more. They convert AC grid power into a controlled DC output that directly charges the EV battery, bypassing the onboard charger to achieve faster charging speeds.
Key requirements include:
- High efficiency to reduce energy losses
- Robust thermal management
- Compliance with safety and communication standards (e.g., CCS, CHAdeMO)
- Scalable and modular design for power upgrades
Mind Map: Core Components of a High-Power DC Fast Charger
Architecture Types
Centralized Architecture
- Single large AC-DC converter feeding multiple DC outputs.
- Advantages: Reduced component count, centralized control.
- Challenges: Complex power distribution, scalability limitations.
Modular Architecture
- Multiple smaller power modules operating in parallel.
- Advantages: Scalability, redundancy, easier maintenance.
- Challenges: Synchronization and control complexity.
Cascaded Architecture
- Combination of AC-DC stage followed by multiple DC-DC converters.
- Advantages: Flexible voltage/current control, improved efficiency.
- Challenges: Increased component count and cost.
Mind Map: Comparison of Architectures
Practical Example: Designing a 150 kW Modular DC Fast Charger
Scenario: A charging station requires a 150 kW DC fast charger with modular design for future scalability.
Design Approach:
- Use three 50 kW power modules in parallel.
- Each module includes:
- PFC stage for grid interface.
- Isolated DC-DC converter to step down voltage.
- Dedicated microcontroller for local control.
- Central controller manages load sharing and communication.
Best Practices:
- Implement current sharing algorithms to balance load.
- Use liquid cooling for power modules to maintain thermal stability.
- Integrate safety interlocks and fault detection per module.
Example Mind Map: Modular Charger Design
Key Design Considerations
- Power Quality: Ensure low harmonic distortion and high power factor using active PFC.
- Thermal Management: High power densities require advanced cooling solutions.
- Safety: Implement overcurrent, overvoltage, and ground fault protections.
- Communication: Support standard protocols (e.g., ISO 15118) for interoperability.
Summary
High-power DC fast charging architectures balance efficiency, scalability, and reliability. Modular designs are increasingly favored for their flexibility and maintainability, while centralized and cascaded architectures remain relevant depending on application needs. Integrating best practices in power conversion, control, and thermal management ensures robust and efficient charging infrastructure.
7.2 Grid Interface and Power Quality Management
Electric vehicle (EV) fast charging stations interface directly with the power grid, often at high power levels (e.g., 50kW and above). Ensuring a stable, efficient, and compliant connection to the grid is critical for both the utility and the EV user. This section covers the essentials of grid interfacing and power quality management, with practical examples and mind maps to clarify concepts.
Key Concepts in Grid Interface
- Grid Connection Requirements: Voltage levels, frequency, phase synchronization.
- Power Factor Correction (PFC): Minimizing reactive power to reduce losses.
- Harmonic Distortion: Caused by nonlinear loads like power electronics.
- Voltage and Current Regulation: Maintaining stable output despite grid fluctuations.
- Anti-Islanding Protection: Safety mechanism to detect grid outages.
Mind Map: Grid Interface Components and Functions
Power Quality Management Challenges
- Harmonics: Fast chargers use switching power electronics that generate harmonic currents, which can distort the grid voltage waveform.
- Power Factor: Poor power factor leads to inefficient energy use and penalties from utilities.
- Voltage Flicker: Rapid changes in load can cause voltage fluctuations affecting other customers.
- Transient Disturbances: Switching events can cause voltage spikes or dips.
Best Practices for Power Quality Management
- Implement Active PFC Circuits: These dynamically adjust input current waveform to match the voltage waveform, improving power factor close to unity.
- Use EMI Filters: To reduce conducted and radiated emissions.
- Harmonic Filtering: Passive LC filters or active filters can be used to mitigate harmonics.
- Grid Synchronization: Use phase-locked loops (PLLs) to ensure inverter output is synchronized with grid voltage and frequency.
- Comply with Standards: Follow IEEE 519 for harmonic limits and IEC 61000 for EMC.
Mind Map: Power Quality Management Techniques
Practical Example: Implementing Grid Interface for a 50kW DC Fast Charger
Scenario: Designing the grid interface stage for a 50kW DC fast charger that connects to a 3-phase 400V AC grid.
Step 1: Input Stage
- Use a 3-phase circuit breaker and EMI filter to protect and clean the input.
Step 2: Active PFC Stage
- Implement a Vienna rectifier topology for active PFC, achieving >0.98 power factor.
Step 3: DC Link
- Use a large electrolytic capacitor bank to smooth DC voltage.
Step 4: Inverter and Synchronization
- Use a 3-phase inverter controlled via a PLL to synchronize output with grid frequency and phase.
Step 5: Protection
- Integrate anti-islanding detection using voltage and frequency monitoring.
Step 6: Monitoring and Control
- Implement real-time monitoring of power quality parameters and communicate with grid operator.
Outcome:
- The charger operates efficiently, complies with grid codes, and minimizes disturbances.
Additional Example: Harmonic Analysis and Mitigation
- Measure harmonic distortion at the charger input using a power quality analyzer.
- Identify dominant harmonics (e.g., 5th and 7th).
- Design a passive LC filter tuned to these harmonic frequencies.
- After installation, re-measure to confirm harmonic reduction below IEEE 519 limits.
Summary
Grid interface and power quality management are critical for reliable and safe operation of EV fast chargers. By implementing active PFC, harmonic mitigation, synchronization, and protection mechanisms, designers can ensure compliance and minimize impact on the grid.
References
- IEEE Std 519-2014: IEEE Recommended Practices and Requirements for Harmonic Control in Electric Power Systems
- IEC 61000-3-2: Electromagnetic compatibility (EMC) - Limits for harmonic current emissions
- “Power Electronics for Renewable and Distributed Energy Systems” by Sudipta Chakraborty et al.
7.3 Safety Standards and Compliance
Ensuring safety and regulatory compliance is paramount in the design and deployment of fast charging infrastructure for electric vehicles (EVs). This section covers the critical safety standards, compliance requirements, and best practices that power electronics engineers and EV technicians must follow to guarantee safe operation, protect users, and meet legal obligations.
Key Safety Standards for EV Fast Charging Infrastructure
- IEC 61851: International standard for electric vehicle conductive charging systems. Defines general requirements, charging modes, and communication protocols.
- UL 2202: Standard for electric vehicle charging system equipment in North America, focusing on safety aspects.
- ISO 15118: Communication interface between EV and charging station, including security and safety features.
- IEEE 2030.1.1: Guide for electric transportation infrastructure interoperability and safety.
- National Electrical Code (NEC) Article 625: US code for EV charging equipment installation and safety.
Mind Map: Overview of Safety Standards and Compliance
Electrical Safety Requirements
- Isolation and Insulation: High-voltage circuits must have proper isolation barriers to prevent electric shock.
- Grounding and Bonding: Proper grounding reduces risk of electric shock and equipment damage.
- Overcurrent Protection: Use of fuses, circuit breakers to prevent damage from short circuits or overloads.
- Leakage Current Limits: Compliance with maximum allowable leakage current to ensure user safety.
Example: Implementing Ground Fault Detection
A 50kW DC fast charger must detect ground faults promptly to prevent hazards. Using a residual current device (RCD) integrated into the power electronics control system, the charger monitors leakage currents continuously. If leakage exceeds a threshold (e.g., 30mA), the system immediately disconnects power, alerts the user, and logs the fault.
Thermal and Fire Safety
- Use temperature sensors on power modules to detect overheating.
- Design enclosures with fire-retardant materials.
- Implement automatic shutdown procedures on thermal fault detection.
Example: Thermal Safety Integration
In a fast charger power stage, thermistors are placed near IGBTs and capacitors. The control unit reads these sensors every 100ms. If temperature exceeds 85°C, the charger reduces power output or shuts down to prevent damage or fire risk.
EMC and Surge Protection Compliance
- Compliance with EMC standards (e.g., CISPR 11) to prevent electromagnetic interference.
- Use of surge protection devices to guard against voltage spikes from the grid.
Example: Surge Protection Implementation
A fast charger includes Metal Oxide Varistors (MOVs) and Transient Voltage Suppressors (TVS) on the AC input line. During a grid surge event, these components clamp voltage spikes, protecting sensitive power electronics.
Documentation and Certification
- Maintain detailed design and test documentation.
- Perform third-party certification testing.
- Keep records for regulatory audits and warranty claims.
Mind Map: Compliance Process Workflow
Summary of Best Practices
- Early integration of safety standards in design.
- Continuous monitoring of electrical and thermal parameters.
- Use of certified components and modules.
- Regular firmware updates to address security and safety.
- Comprehensive testing including fault injection and stress tests.
By adhering to these safety standards and compliance guidelines, engineers and technicians can ensure that fast charging infrastructure operates reliably, safely, and meets all regulatory requirements, fostering user confidence and accelerating EV adoption.
7.4 Practical Example: Implementing a 50kW DC Fast Charger Power Stage
Introduction
Designing a 50kW DC fast charger power stage involves integrating high-power components, ensuring efficient energy conversion, managing thermal and EMI challenges, and complying with safety standards. This example walks through the key design steps, best practices, and practical considerations.
Mind Map: Key Components and Design Considerations
Step 1: Input Stage Design
- AC Input and EMI Filtering: Use an EMI filter to suppress conducted and radiated noise, ensuring compliance with EMC standards.
- Power Factor Correction (PFC): Implement an active PFC stage (typically a boost converter) to maintain near-unity power factor and reduce harmonics.
Example:
- A PFC boost converter operating in Continuous Conduction Mode (CCM) with a switching frequency of 100 kHz can achieve >95% efficiency.
Step 2: DC-DC Conversion Stage
- Topology Selection: For 50kW, isolated topologies like LLC resonant or phase-shifted full-bridge converters are preferred for high efficiency and galvanic isolation.
- Transformer Design: Select a high-frequency transformer rated for 50kW with proper insulation and low leakage inductance.
- Output Rectification: Use synchronous rectifiers (MOSFETs) instead of diodes to reduce conduction losses.
Example:
- Implementing a phase-shifted full-bridge converter with SiC MOSFETs switching at 50 kHz can achieve efficiencies above 96%.
Step 3: Control and Protection
- Control Loops: Use digital controllers (DSP or microcontroller) to regulate output voltage and current with fast response.
- Protection Features: Include overcurrent, overvoltage, short-circuit, and thermal shutdown protections.
Example:
- A dual-loop control scheme with an outer voltage loop and inner current loop ensures stable output under varying load conditions.
Step 4: Thermal Management
- Heat Dissipation: Use heat sinks with appropriate thermal resistance.
- Cooling Methods: Forced air cooling is common; liquid cooling may be required for compact designs.
Example:
- Thermal simulation shows that with a 10°C/W heat sink and 2 m/s airflow, MOSFET junction temperature stays below 100°C at full load.
Step 5: Communication Interface
- Protocols: Implement CAN or Power Line Communication (PLC) for communication with the EV for charging control and status reporting.
Step 6: Safety and Compliance
- Isolation: Ensure isolation between primary and secondary sides per IEC 61851 and IEC 62196 standards.
- Ground Fault Detection: Implement residual current monitoring to detect leakage currents.
Mind Map: Design Workflow
Practical Example Summary Table
| Design Aspect | Choice / Specification | Notes |
|---|---|---|
| Input Voltage | 400 VAC (3-phase) | Common grid voltage for fast chargers |
| PFC Stage | Boost converter, CCM, 100 kHz switching | >95% efficiency |
| DC-DC Converter | Phase-shifted full-bridge, SiC MOSFETs | >96% efficiency, galvanic isolation |
| Switching Frequency | 50 kHz | Balance between efficiency and size |
| Transformer | High-frequency, 50kW rating | Low leakage inductance |
| Output Voltage | 400 V DC | Compatible with EV battery systems |
| Output Current | 125 A | Corresponds to 50kW power level |
| Cooling | Forced air, heat sinks | Thermal simulations validate design |
| Control | DSP-based dual-loop control | Stable voltage/current regulation |
| Protection | Overcurrent, overvoltage, thermal shutdown | Safety and reliability |
| Communication | CAN bus | EV-charger communication |
Additional Tips and Best Practices
- Use wide bandgap devices (SiC MOSFETs) for higher efficiency and reduced cooling requirements.
- Optimize PCB layout to minimize parasitic inductances and EMI.
- Implement soft-start and inrush current limiting to protect components.
- Validate design through extensive simulation before prototyping.
Conclusion
Implementing a 50kW DC fast charger power stage requires careful integration of power electronics, control, thermal management, and safety features. Following a structured design approach with attention to component selection, topology, and protection ensures a reliable and efficient charging solution.
8. Thermal Management in EV Power Electronics
8.1 Heat Generation Sources in Power Electronics
Power electronics devices in electric vehicles (EVs) and charging infrastructure are critical for efficient energy conversion but inherently generate heat during operation. Understanding the sources of heat generation is essential for designing effective thermal management systems to ensure reliability, performance, and longevity.
Key Heat Generation Sources
-
Conduction Losses
- Occur when current flows through semiconductor devices and passive components.
- Related to the device’s on-state resistance (R_DS(on) for MOSFETs, V_CE(sat) for IGBTs).
-
Switching Losses
- Generated during the transition between ON and OFF states in switching devices.
- Includes turn-on, turn-off losses, and overlap losses when voltage and current coexist.
-
Gate Drive Losses
- Energy consumed in charging and discharging the gate capacitance of MOSFETs or IGBTs.
-
Conduction Losses in Passive Components
- Losses in inductors, transformers, and capacitors due to resistance and core losses.
-
Leakage Currents
- Small currents flowing through devices even when off, contributing to minor heat generation.
-
Parasitic Effects
- Losses due to stray inductances, capacitances, and resistance in PCB traces and packaging.
-
Magnetic Core Losses
- Hysteresis and eddy current losses in magnetic components like inductors and transformers.
Mind Map: Heat Generation Sources in EV Power Electronics
Practical Examples
Example 1: Conduction Losses in a MOSFET-Based DC-DC Converter
In a buck converter stepping down 400 V battery voltage to 12 V, the MOSFET has an R_DS(on) of 10 mΩ. When the load current is 20 A, conduction losses can be estimated as:
P_conduction = I^2 × R_DS(on) = 20^2 × 0.01 = 4 W
This 4 W of heat must be dissipated by the MOSFET’s thermal management system.
Example 2: Switching Losses in an IGBT Inverter
An IGBT switching at 10 kHz with a switching energy loss \(E_sw\) of 0.5 mJ per switching event will generate:
P_switching = E_sw × switching frequency = 0.5 × 10^{-3} J × 10,000 Hz = 5 W
This 5 W adds to the total heat load and must be considered in cooling design.
Example 3: Magnetic Core Losses in an Inductor
An inductor operating at 50 kHz with a core loss density of 300 mW/cm³ and a core volume of 2 cm³ will dissipate:
P_core = 300 mW/cm³ × 2 cm³ = 600 mW = 0.6 W
Though smaller than semiconductor losses, this heat contributes to overall thermal stress.
Summary
Heat generation in EV power electronics arises from multiple sources including conduction and switching losses in semiconductors, losses in passive components, and parasitic effects. Quantifying these losses through calculations and simulations enables engineers to design appropriate cooling strategies such as heat sinks, forced air, or liquid cooling.
Understanding these sources is the foundation for the next section on cooling techniques and thermal management best practices.
8.2 Cooling Techniques: Air, Liquid, and Phase Change
Effective thermal management is critical for maintaining the reliability and performance of power electronics in electric vehicles (EVs). Excessive heat can degrade semiconductor devices, reduce efficiency, and shorten system lifespan. This section explores three primary cooling techniques used in EV power electronics: air cooling, liquid cooling, and phase change cooling. Each technique will be explained with practical examples and mind maps to aid understanding.
Air Cooling
Air cooling is the most straightforward and commonly used method, especially in low to medium power applications.
- Principle: Heat generated by power electronics is transferred to the surrounding air via convection.
- Methods: Natural convection (passive) or forced convection (using fans or blowers).
Advantages:
- Simple and cost-effective
- Easy to implement and maintain
Limitations:
- Limited heat dissipation capacity
- Dependent on ambient air temperature
Practical Example:
A typical 12V DC-DC converter module in an EV uses a heat sink with fins and a small fan to dissipate heat. The fan forces air over the fins, increasing the heat transfer rate.
Mind Map: Air Cooling
Liquid Cooling
Liquid cooling is widely used in high-power EV power electronics such as inverters and onboard chargers.
- Principle: Heat is transferred from the power electronics to a liquid coolant (usually water-glycol mixture), which circulates through a heat exchanger.
Advantages:
- Higher heat capacity than air
- More uniform temperature control
- Enables compact designs due to efficient heat removal
Limitations:
- More complex system with pumps, tubing, and potential leak risks
- Higher cost and maintenance requirements
Practical Example:
An EV traction inverter module uses a cold plate attached to the power semiconductor package. Liquid coolant flows through the cold plate, absorbing heat and transferring it to a radiator.
Mind Map: Liquid Cooling
Phase Change Cooling
Phase change cooling leverages the latent heat absorbed or released during a substance’s phase transition (e.g., liquid to vapor).
- Principle: Heat causes a coolant to evaporate, absorbing large amounts of heat at constant temperature; the vapor is then condensed back to liquid.
Types:
- Heat pipes
- Vapor chambers
- Two-phase liquid cooling loops
Advantages:
- Extremely efficient heat transfer
- Passive operation possible (heat pipes)
- Can maintain near-constant temperature
Limitations:
- More complex design and manufacturing
- Costly materials and components
Practical Example:
A high-power inverter module uses heat pipes embedded in the base plate to rapidly spread heat away from hotspots to a heat sink.
Mind Map: Phase Change Cooling
Comparative Summary Mind Map
Additional Practical Example: Cooling Selection for an EV Inverter
Scenario: Designing thermal management for a 100 kW EV traction inverter.
-
Option 1: Air Cooling
- Requires large heat sinks and powerful fans
- May not maintain safe operating temperature under heavy load
-
Option 2: Liquid Cooling
- Compact cold plate design
- Efficient heat removal
- Requires coolant loop integration
-
Option 3: Phase Change Cooling
- Incorporate heat pipes to spread heat
- Combine with liquid cooling for hotspot management
Best Practice: Use a hybrid approach combining phase change elements (heat pipes) embedded in the cold plate of a liquid cooling system to maximize heat transfer and reliability.
Summary
- Air cooling is suitable for low-power, cost-sensitive applications.
- Liquid cooling is the standard for high-power EV power electronics due to superior heat removal.
- Phase change cooling offers advanced thermal management for hotspots and high-density modules.
- Selecting the right cooling technique depends on power levels, space constraints, cost, and reliability requirements.
Understanding these cooling techniques and their practical applications ensures optimal performance and longevity of EV power electronics.
8.3 Design Best Practices for Thermal Reliability
Thermal reliability is a critical aspect of power electronics design in electric vehicles (EVs). Excessive heat can degrade semiconductor devices, reduce efficiency, and ultimately lead to system failure. This section covers best practices to ensure robust thermal management, enhancing the longevity and performance of EV power electronics.
Key Principles of Thermal Reliability
- Heat Generation Awareness: Understand sources of heat within power devices (conduction losses, switching losses).
- Effective Heat Dissipation: Use appropriate cooling methods to remove heat efficiently.
- Thermal Interface Optimization: Minimize thermal resistance between components and heat sinks.
- Temperature Monitoring: Implement sensors and feedback to prevent overheating.
Mind Map: Thermal Reliability Design Best Practices
Best Practice 1: Accurate Thermal Modeling and Simulation
Example:
Before finalizing an inverter design, use thermal simulation software (e.g., ANSYS Icepak, COMSOL Multiphysics) to model heat flow and temperature distribution. Simulate under worst-case operating conditions to identify hotspots.
- Model power losses as heat sources.
- Include realistic boundary conditions (ambient temperature, airflow).
- Iterate design to optimize heat sink size and placement.
Benefit: Prevents costly redesigns and ensures components operate within safe temperature limits.
Best Practice 2: Selecting Appropriate Cooling Methods
Example:
For a high-power EV traction inverter generating 500W of heat:
- Use a liquid cooling loop integrated with the vehicle’s coolant system.
- Employ a cold plate attached directly to the inverter’s power modules.
- Include temperature sensors to monitor coolant and device temperatures.
This approach outperforms air cooling in heat removal efficiency and maintains stable operating temperatures.
Best Practice 3: Optimizing Thermal Interface Materials (TIMs)
Example:
When mounting IGBTs on a heat sink:
- Apply a thin, uniform layer of high-quality thermal grease to fill microscopic air gaps.
- Avoid excessive TIM thickness which increases thermal resistance.
- Consider phase change materials that become more conductive at operating temperatures.
Benefit: Reduces junction-to-case thermal resistance, improving heat transfer.
Best Practice 4: PCB Layout for Thermal Management
Example:
In a DC-DC converter PCB:
- Place high-power components close to heat sinks.
- Use multiple thermal vias beneath power devices to conduct heat to inner copper layers.
- Maximize copper pour areas connected to component pads to spread heat.
Benefit: Enhances heat dissipation through the PCB, reducing component temperatures.
Best Practice 5: Temperature Monitoring and Protection
Example:
Integrate NTC thermistors near power semiconductors:
- Use readings to trigger derating or shutdown if temperatures exceed thresholds.
- Implement software alarms and hardware failsafes.
Benefit: Prevents thermal runaway and catastrophic failures.
Best Practice 6: Component Derating and Thermal Cycling Considerations
Example:
Select IGBTs rated for 125°C junction temperature but design system to operate below 100°C junction temperature under all conditions.
- This margin improves reliability and lifespan.
- Account for thermal expansion and contraction to avoid mechanical stress.
Summary Table: Thermal Design Best Practices with Examples
| Best Practice | Description | Example Application |
|---|---|---|
| Thermal Simulation | Model heat flow and identify hotspots | ANSYS Icepak simulation of inverter module |
| Cooling Method Selection | Choose cooling based on power dissipation | Liquid cooling for 500W traction inverter |
| Thermal Interface Optimization | Use proper TIMs to reduce thermal resistance | Thin layer of thermal grease on IGBTs |
| PCB Layout | Design PCB for heat spreading | Thermal vias and copper pours under MOSFETs |
| Temperature Monitoring | Sensors for real-time temperature feedback | NTC thermistors triggering shutdown |
| Component Derating | Operate below max temperature ratings | Design for max 100°C junction on 125°C rated IGBTs |
By following these best practices, engineers can design power electronics modules for EVs that maintain thermal reliability, ensuring safety, efficiency, and long-term durability.
8.4 Practical Example: Thermal Simulation and Cooling Design for an Inverter Module
In this section, we will walk through a practical example of performing thermal simulation and designing an effective cooling solution for a typical inverter module used in electric vehicles (EVs). This example integrates best practices and provides easy-to-understand explanations.
Step 1: Understanding the Thermal Challenges in an Inverter Module
An inverter module typically consists of power semiconductor devices (IGBTs or MOSFETs), gate drivers, capacitors, and other components. These components generate heat during operation, which must be effectively dissipated to ensure reliability and performance.
Key heat sources:
- Power semiconductor losses (conduction and switching losses)
- Driver circuits
- Passive components
Thermal challenges:
- Hot spots on semiconductor junctions
- Uneven temperature distribution
- Limited space for cooling solutions in EV packaging
Step 2: Define the Thermal Simulation Objectives
- Identify temperature distribution across the inverter module
- Locate potential hot spots
- Evaluate the effectiveness of different cooling methods
- Optimize cooling design to maintain device junction temperatures below maximum ratings
Step 3: Create a Mind Map of the Thermal Simulation Process
Thermal Simulation Process Mind Map
Step 4: Example Parameters for Simulation
| Parameter | Value |
|---|---|
| Power Loss (per IGBT) | 30 W |
| Number of IGBTs | 6 |
| Ambient Temperature | 40 °C |
| Thermal Conductivity (Heatsink) | 200 W/m·K |
| Cooling Method | Forced Air Cooling |
Step 5: Setting Up the Thermal Model
- Geometry: Model the inverter module including IGBTs, PCB, and heatsink.
- Material Properties: Assign thermal conductivity and heat capacity to each component.
- Heat Sources: Apply power losses as heat generation in semiconductor junctions.
- Boundary Conditions: Set ambient temperature and airflow velocity for forced air cooling.
Step 6: Perform Simulation and Analyze Results
- Run the simulation to obtain temperature distribution.
- Identify if any component exceeds the maximum junction temperature (e.g., 150 °C for IGBTs).
Example result:
- Maximum junction temperature: 135 °C
- Hot spots located near the center IGBTs
Step 7: Cooling Design Optimization
Based on the simulation results, optimize cooling by:
- Increasing airflow rate
- Using a heatsink with higher thermal conductivity
- Adding thermal interface materials (TIM) between components and heatsink
Cooling Design Optimization Mind Map
Step 8: Re-run Simulation with Improved Cooling
- After implementing changes (e.g., increasing airflow by 20%), re-run simulation.
Example improved result:
- Maximum junction temperature reduced to 120 °C
- More uniform temperature distribution
Step 9: Practical Tips and Best Practices
- Always validate simulation models with experimental data.
- Consider transient thermal behavior for dynamic load conditions.
- Use conservative safety margins for maximum junction temperatures.
- Optimize component layout to minimize thermal coupling.
- Select TIMs with low thermal resistance and good mechanical compliance.
Summary
This practical example demonstrated how to approach thermal simulation and cooling design for an inverter module in an EV:
- Defined the problem and simulation objectives
- Created a thermal model with realistic parameters
- Used simulation tools to identify hot spots
- Optimized cooling design iteratively
- Applied best practices to ensure reliability
By following this structured approach, EV power electronics designers can enhance inverter module performance and longevity through effective thermal management.
9. Electromagnetic Interference (EMI) and Noise Mitigation
9.1 Sources of EMI in EV Power Electronics
Electromagnetic Interference (EMI) is a critical challenge in the design and operation of power electronics in electric vehicles (EVs). EMI can degrade system performance, cause malfunctions, and lead to non-compliance with regulatory standards. Understanding the sources of EMI is the first step toward effective mitigation.
What is EMI?
EMI refers to unwanted electromagnetic energy that disrupts the normal operation of electronic devices. In EV power electronics, EMI primarily originates from high-frequency switching and rapid changes in current and voltage.
Mind Map: Sources of EMI in EV Power Electronics
Conducted EMI
Conducted EMI travels along conductors such as power cables and signal lines. In EV power electronics, it mainly arises from:
-
Switching Devices: Rapid switching of MOSFETs and IGBTs generates high-frequency noise that propagates through power lines.
-
Power Converters: DC-DC converters and inverters switch currents at high frequencies, causing voltage spikes and ripple.
-
Wiring and Cabling: Long cables act as antennas, picking up and transmitting noise if not properly shielded or twisted.
Example: A DC-DC converter operating at 200 kHz switching frequency produces voltage ripple that couples into the 12V auxiliary system, causing audible noise in the vehicle’s infotainment system.
Radiated EMI
Radiated EMI is electromagnetic energy emitted through space, often due to rapid changes in voltage (dv/dt) and current (di/dt).
-
High dv/dt and di/dt Transitions: PWM switching in inverters causes fast voltage and current edges, which emit electromagnetic waves.
-
Loop Areas: Large current loops on PCB layouts or wiring harnesses act as antennas, radiating EMI.
-
Electric Motors: The switching of motor phases and commutation can cause inductive coupling and radiated noise.
Example: An inverter controlling a brushless DC motor generates high-frequency switching noise that radiates and interferes with the vehicle’s wireless key fob operation.
External Sources
Though not generated by the EV power electronics themselves, external EMI sources can affect system performance:
- Nearby radio transmitters or communication devices
- Other vehicle systems such as ignition or lighting
Example: A strong nearby radio transmitter induces noise into the EV’s charging system, causing false fault detection.
Practical Example: Identifying EMI Sources in an EV Inverter
Consider an EV inverter with the following symptoms:
- Audible noise from speakers when the motor is running
- Intermittent communication errors on the CAN bus
Investigation Steps:
- Measure conducted emissions on power lines using a LISN (Line Impedance Stabilization Network).
- Use a near-field probe to detect radiated emissions near the inverter PCB.
- Inspect PCB layout for large loop areas and poor grounding.
- Check switching waveforms for excessive dv/dt spikes.
Findings:
- High-frequency noise spikes at switching edges causing conducted EMI.
- Large current loops on the PCB acting as antennas for radiated EMI.
Mitigation:
- Add snubber circuits to reduce voltage spikes.
- Optimize PCB layout to minimize loop areas.
- Use shielded cables and proper grounding.
Understanding these sources enables engineers and technicians to design robust EV power electronics systems with minimized EMI, ensuring reliability and regulatory compliance.
9.2 Shielding, Filtering, and Layout Techniques
Effective mitigation of electromagnetic interference (EMI) in electric vehicle (EV) power electronics hinges on a well-rounded approach combining shielding, filtering, and PCB/layout design techniques. This section explores these methods with practical examples and mind maps to clarify the concepts.
Shielding Techniques
Shielding involves placing conductive or magnetic barriers to block or redirect EMI from sensitive circuits or to prevent emissions from escaping.
- Types of Shielding:
- Faraday Cages: Enclosures made of conductive material that block electric fields.
- Magnetic Shields: Use of high permeability materials (e.g., Mu-metal) to redirect magnetic fields.
- Cable Shielding: Braided or foil shields around cables to reduce radiated emissions.
Best Practices:
- Ensure continuous conductive paths with minimal gaps.
- Proper grounding of shields to avoid ground loops.
- Use double shielding for high-frequency noise.
Example: In an EV inverter module, enclosing the power stage in an aluminum Faraday cage connected to chassis ground reduces radiated EMI that could interfere with the vehicle’s CAN bus communication.
Filtering Techniques
Filters suppress conducted EMI by attenuating unwanted frequency components on power and signal lines.
- Common Filter Types:
- LC Filters: Inductors and capacitors arranged to block high-frequency noise.
- Pi Filters: Capacitor–inductor–capacitor configuration for sharper roll-off.
- Common Mode Chokes: Suppress noise appearing equally on both lines.
Best Practices:
- Place filters as close as possible to noise sources.
- Use low-ESR capacitors for high-frequency effectiveness.
- Combine differential and common mode filtering for comprehensive EMI reduction.
Example: A 12V DC-DC converter in an EV uses a common mode choke and a pi filter at its input to reduce switching noise feeding back into the battery line, improving overall system EMC.
PCB/Layout Techniques
PCB layout is critical to minimizing EMI by controlling current loops, reducing parasitic inductances, and ensuring proper grounding.
Key Techniques:
- Short and Wide Traces: Minimize inductance and resistance in high-current paths.
- Ground Planes: Use continuous ground planes to provide low impedance return paths.
- Separation of Noisy and Sensitive Circuits: Physically isolate high-frequency switching nodes from analog or communication circuits.
- Proper Via Placement: Minimize loop areas by placing vias strategically.
- Differential Pair Routing: Maintain equal length and spacing to reduce EMI.
Best Practices:
- Implement star grounding or single-point grounding to avoid ground loops.
- Use split ground planes carefully; ensure proper stitching with vias.
- Route high di/dt loops close together to reduce loop area.
Example: In a three-phase inverter PCB, the high-current switching loops are routed with wide copper traces and a solid ground plane beneath. Sensitive gate driver signals are routed on a separate layer with ground shielding traces to reduce noise coupling.
Mind Maps
Mind Map 1: Shielding Techniques
Mind Map 2: Filtering Techniques
Mind Map 3: PCB/Layout Techniques
Integrated Practical Example
Scenario: Designing EMI mitigation for a 48V DC-DC converter module in an EV.
- Shielding: Enclose the converter PCB in a grounded aluminum case acting as a Faraday cage.
- Filtering: Add a pi filter (two X capacitors and one common mode choke) at the input power line to suppress switching noise.
- PCB Layout: Use a solid ground plane, route high-current loops with wide copper traces, and separate sensitive control signals on a different PCB layer with ground shielding.
Outcome: This integrated approach reduces conducted and radiated EMI, ensuring compliance with automotive EMC standards and improving system reliability.
By combining shielding, filtering, and careful PCB/layout design, EV power electronics engineers can effectively mitigate EMI challenges, enhancing performance and compliance.
9.3 Compliance with EMC Standards
Electromagnetic Compatibility (EMC) compliance is a critical requirement for power electronics in electric vehicles (EVs) and charging infrastructure. Ensuring that devices neither emit excessive electromagnetic interference (EMI) nor are unduly affected by external electromagnetic disturbances is essential for reliable operation, safety, and regulatory approval.
Understanding EMC Standards
EMC standards define the limits and testing procedures for emissions and immunity of electronic devices. For EV power electronics, common standards include:
- CISPR 25: Limits on radio disturbance characteristics for vehicles, boats, and internal combustion engines.
- ISO 11452: Vehicle test methods for immunity to radiated electromagnetic disturbances.
- IEC 61000 series: General EMC standards covering emissions and immunity.
- SAE J1113: EMC test procedures for automotive components.
Compliance with these standards ensures that EV power electronics do not interfere with other vehicle systems or external devices and can withstand typical electromagnetic environments.
Key EMC Compliance Requirements
- Radiated Emissions: Limits on electromagnetic energy emitted through the air.
- Conducted Emissions: Limits on electromagnetic energy conducted through cables and power lines.
- Radiated Immunity: Ability to operate correctly when exposed to external electromagnetic fields.
- Conducted Immunity: Resistance to disturbances conducted via cables.
Best Practices for Achieving EMC Compliance
- Proper PCB Layout: Minimize loop areas, use ground planes, and separate noisy and sensitive circuits.
- Shielding: Use metal enclosures or conductive coatings to contain emissions.
- Filtering: Employ EMI filters on power and signal lines to suppress conducted emissions.
- Grounding: Implement a solid and low-impedance grounding scheme.
- Component Selection: Use components with low EMI characteristics and appropriate ratings.
Mind Map: EMC Compliance Overview
Example: EMI Filter Design for Compliance
Consider a DC-DC converter module in an EV that must meet CISPR 25 Class 5 radiated emission limits. The design team implements a multi-stage EMI filter on the input power line:
- Stage 1: Common-mode choke to suppress differential and common-mode noise.
- Stage 2: X and Y capacitors to shunt high-frequency noise to ground.
- Stage 3: Pi-filters combining inductors and capacitors for enhanced attenuation.
After implementing the filter, pre-compliance testing in an anechoic chamber shows emissions reduced by 15 dB, meeting the required limits.
Mind Map: EMI Filter Design Steps
Example: PCB Layout for EMC Compliance
A power inverter PCB layout is optimized by:
- Placing power and control grounds on separate planes but connected at a single point.
- Routing high-current paths with wide traces to reduce inductance.
- Minimizing loop areas for switching nodes.
- Placing decoupling capacitors close to IC power pins.
This layout reduces radiated emissions and improves immunity, verified by EMC testing.
Mind Map: PCB Layout EMC Best Practices
Summary
Compliance with EMC standards is a multi-faceted process involving understanding applicable regulations, designing with EMC in mind, and thorough testing. By integrating best practices such as careful PCB layout, effective filtering, and shielding, EV power electronics can achieve reliable and safe operation within regulatory limits.
For EV technicians and engineers, early consideration of EMC compliance during design reduces costly redesigns and ensures smooth certification processes.
9.4 Practical Example: Designing EMI Filters for a DC-DC Converter
Electromagnetic Interference (EMI) is a critical concern in DC-DC converters used in electric vehicles (EVs). Proper EMI filter design ensures compliance with electromagnetic compatibility (EMC) standards and prevents noise from affecting other vehicle electronics.
Step 1: Understand EMI Sources in DC-DC Converters
- Switching Noise: Rapid switching of MOSFETs/IGBTs generates high-frequency noise.
- Conducted Emissions: Noise propagates through input/output power lines.
- Radiated Emissions: Noise radiates from PCB traces and components.
Mind Map: EMI Sources in DC-DC Converters
Step 2: Define EMI Filter Requirements
- Target Frequency Range: Typically from 150 kHz to 30 MHz for conducted EMI.
- Attenuation Level: Based on EMC standards (e.g., CISPR 25 for automotive).
- Insertion Loss: Minimize to maintain converter efficiency.
Step 3: Choose Filter Topology
- Common-Mode (CM) Filters: Suppress noise common to both lines.
- Differential-Mode (DM) Filters: Suppress noise between lines.
Typical filter includes:
- Common-mode chokes
- X capacitors (across lines)
- Y capacitors (line to ground)
Mind Map: EMI Filter Components
Step 4: Calculate Component Values
Example: Designing an EMI filter for a 12 V DC-DC converter with 10 A max current.
- Common-Mode Choke: Choose inductance ~1 mH, rated for 15 A to avoid saturation.
- X Capacitor: 0.1 µF, rated for 250 VAC.
- Y Capacitor: 1 nF, rated for 250 VAC.
These values provide a good starting point for attenuation in the 150 kHz to 30 MHz range.
Step 5: Simulate Filter Performance
Use circuit simulation tools (e.g., LTspice, PSpice) to analyze insertion loss and impedance.
Mind Map: Simulation Steps
Step 6: PCB Layout Best Practices
- Place EMI filter components close to the converter input/output terminals.
- Use short and wide traces to reduce parasitic inductance.
- Separate noisy and sensitive circuits.
- Implement proper grounding techniques.
Step 7: Testing and Validation
- Measure conducted emissions using a Line Impedance Stabilization Network (LISN).
- Verify compliance with automotive EMC standards (e.g., CISPR 25).
- Adjust filter components as necessary.
Complete Example Summary
| Step | Action | Example Value/Note |
|---|---|---|
| EMI Source Identification | Switching noise from MOSFETs | Fast switching at 100 kHz |
| Filter Topology | Common-mode choke + X & Y capacitors | 1 mH choke, 0.1 µF X cap, 1 nF Y cap |
| Simulation | LTspice model with noise source | Analyze insertion loss > 40 dB |
| PCB Layout | Short traces, close component placement | Minimize parasitic inductance |
| Testing | LISN measurement, CISPR 25 compliance | Adjust components if needed |
Additional Practical Tips
- Use shielded common-mode chokes to reduce radiated EMI.
- Select capacitors with low Equivalent Series Inductance (ESL) for better high-frequency performance.
- Avoid large loops in PCB layout to minimize antenna effects.
- Consider differential and common-mode noise separately for targeted filtering.
This practical example demonstrates a systematic approach to designing EMI filters for DC-DC converters in EV power electronics, combining theoretical understanding with hands-on design and testing practices.
10. Control Strategies for Power Electronics in EVs
10.1 Closed-Loop Control Fundamentals
Closed-loop control is a fundamental concept in power electronics for electric vehicles (EVs), enabling precise regulation of voltage, current, speed, and torque by continuously monitoring the output and adjusting the input accordingly. This feedback mechanism ensures system stability, accuracy, and robustness against disturbances and parameter variations.
What is Closed-Loop Control?
Closed-loop control, also known as feedback control, uses sensors to measure the output variable, compares it with a reference (desired value), and feeds the error back to a controller. The controller then adjusts the actuator or power electronics device to minimize this error.
Key Components:
- Reference Input: Desired value (e.g., target voltage or speed)
- Sensor: Measures actual output
- Error Detector: Calculates difference between reference and output
- Controller: Processes error and generates control signal
- Actuator/Power Stage: Implements control action (e.g., PWM signals to inverter)
- Plant: The system being controlled (motor, battery, converter)
Mind Map: Closed-Loop Control Fundamentals
Why Closed-Loop Control is Critical in EV Power Electronics
- Maintains output voltage/current within tight tolerances: Essential for battery health and motor performance.
- Compensates for load variations: EVs experience rapidly changing loads; closed-loop control adapts dynamically.
- Improves system robustness: Handles parameter changes due to temperature, aging, or manufacturing variations.
- Enables precise motor torque and speed control: Critical for smooth acceleration and energy efficiency.
Basic Control Strategies
-
Proportional Control (P): Control output proportional to error.
- Simple but may leave steady-state error.
-
Integral Control (I): Integrates error over time to eliminate steady-state error.
- Can cause slower response or overshoot if not tuned properly.
-
Derivative Control (D): Reacts to rate of change of error, improving stability and response.
-
PID Control: Combines P, I, and D for balanced performance.
Practical Example 1: Closed-Loop Voltage Regulation in a DC-DC Converter
Scenario: Maintaining a stable 12 V output from a 48 V battery pack despite load changes.
Setup:
- Reference voltage: 12 V
- Sensor: Voltage divider + ADC measuring output voltage
- Controller: PID implemented on a microcontroller
- Actuator: PWM duty cycle controlling the buck converter switch
Operation:
- The sensor reads the output voltage and sends it to the controller.
- The controller compares it with the 12 V reference.
- The error is processed by the PID algorithm.
- The PWM duty cycle is adjusted to increase or decrease the output voltage.
Outcome:
- Output voltage remains stable at 12 V even when load current varies from 0.5 A to 5 A.
Practical Example 2: Speed Control of an EV Traction Motor
Scenario: Controlling the speed of a three-phase AC induction motor.
Setup:
- Reference input: Desired motor speed (RPM)
- Sensor: Rotary encoder or Hall effect sensor measuring actual speed
- Controller: PI or PID controller in motor controller firmware
- Actuator: Inverter PWM signals controlling motor voltage/frequency
Operation:
- The sensor measures actual speed and sends feedback.
- The controller calculates speed error.
- The controller adjusts inverter output voltage and frequency to minimize error.
Outcome:
- Smooth acceleration and deceleration with minimal overshoot.
- Accurate speed tracking under varying load conditions.
Mind Map: Example - Closed-Loop Voltage Regulation
Best Practices for Implementing Closed-Loop Control in EV Power Electronics
- Accurate and fast sensors: Ensure minimal delay and noise for reliable feedback.
- Proper controller tuning: Use methods like Ziegler-Nichols or software tools to tune PID parameters.
- Filtering sensor signals: Apply low-pass filters to reduce measurement noise.
- Consider system delays: Account for sensor and actuator response times to avoid instability.
- Implement safety limits: Prevent control signals from driving hardware beyond safe operating conditions.
- Simulation before deployment: Use tools like MATLAB/Simulink to model and validate control algorithms.
Summary
Closed-loop control is the backbone of power electronics systems in electric vehicles, enabling precise, adaptive, and reliable operation. Understanding its fundamentals, components, and practical implementation examples equips engineers and technicians to design robust EV power electronics systems that meet demanding performance and safety requirements.
10.2 Sensor Integration and Signal Conditioning
In electric vehicles (EVs), precise sensor integration and effective signal conditioning are critical for the reliable operation of power electronics systems. Sensors provide real-time data about voltage, current, temperature, speed, and position, which are essential for control algorithms, fault detection, and system optimization.
Key Objectives of Sensor Integration
- Accurate measurement of electrical and mechanical parameters
- Minimizing noise and interference in sensor signals
- Ensuring compatibility with control electronics
- Providing isolation and protection where necessary
Common Sensors Used in EV Power Electronics
| Sensor Type | Measured Parameter | Typical Application |
|---|---|---|
| Current Sensors | Current (AC/DC) | Motor current monitoring, battery current |
| Voltage Sensors | Voltage (DC/AC) | Battery voltage, inverter output voltage |
| Temperature Sensors | Temperature (junction, ambient) | Thermal management of semiconductors, battery |
| Position Sensors | Rotor position, speed | Motor control (e.g., Hall effect, encoders) |
| Speed Sensors | Rotational speed | Motor speed feedback |
Signal Conditioning Overview
Raw sensor signals often require conditioning before they can be processed by microcontrollers or DSPs. Signal conditioning includes:
- Amplification: Boosting low-level signals to measurable voltage ranges
- Filtering: Removing noise and unwanted frequency components
- Isolation: Protecting control electronics from high voltages or currents
- Linearization: Correcting sensor output to match actual physical values
- Analog-to-Digital Conversion (ADC): Converting conditioned analog signals to digital form
Mind Map: Sensor Integration and Signal Conditioning
Practical Examples
Example 1: Integrating a Hall Effect Current Sensor for Motor Current Measurement
Scenario: Measuring the motor phase current in a 3-phase inverter system.
Approach:
- Use a Hall effect current sensor (e.g., ACS712) for galvanic isolation and direct current measurement.
- Condition the sensor output with a low-pass filter to reduce switching noise from PWM signals.
- Amplify the filtered signal using an instrumentation amplifier to match the ADC input range.
- Use a 12-bit ADC on the microcontroller to digitize the signal.
- Calibrate the sensor output by measuring zero-current offset and full-scale current.
Best Practices:
- Place the sensor close to the motor phase line to reduce noise pickup.
- Use twisted pair or shielded cables for sensor wiring.
- Implement software filtering (moving average) to smooth ADC readings.
Example 2: Signal Conditioning for Battery Voltage Measurement Using Resistive Divider and Isolation Amplifier
Scenario: Measuring a high-voltage battery pack voltage (e.g., 400 V) safely.
Approach:
- Use a resistive voltage divider to scale down the high voltage to a safe level.
- Add an isolation amplifier (e.g., ISO124) to provide galvanic isolation between the high-voltage battery and low-voltage control electronics.
- Include RC low-pass filtering to reduce noise.
- Feed the conditioned signal into a high-resolution ADC.
Best Practices:
- Select precision resistors with low temperature coefficient for the voltage divider.
- Ensure the isolation amplifier meets the required isolation voltage rating.
- Regularly calibrate the measurement system to maintain accuracy.
Example 3: Temperature Sensor Integration for Power Module Thermal Management
Scenario: Monitoring the junction temperature of an IGBT module.
Approach:
- Use a thermistor placed close to the IGBT junction.
- Implement a Wheatstone bridge circuit for improved sensitivity.
- Condition the output with an instrumentation amplifier.
- Apply linearization via a lookup table in firmware.
Best Practices:
- Place the sensor as close as possible to the heat source.
- Use thermal interface materials to improve thermal contact.
- Implement alarms in firmware for over-temperature conditions.
Summary
Effective sensor integration and signal conditioning are foundational for robust EV power electronics control. By carefully selecting sensors, applying proper signal conditioning techniques, and following best practices such as shielding, grounding, and calibration, engineers can ensure accurate and reliable data acquisition essential for system performance and safety.
10.3 Digital Control Implementation Using Microcontrollers and DSPs
Digital control is a cornerstone in modern power electronics systems for electric vehicles (EVs). It enables precise, flexible, and adaptive control of converters and inverters, improving efficiency, reliability, and performance. This section explores how microcontrollers (MCUs) and digital signal processors (DSPs) are used to implement digital control in EV power electronics, with practical examples and mind maps to clarify concepts.
Key Concepts in Digital Control for Power Electronics
- Sampling and Discretization: Analog signals from sensors (voltage, current, temperature) are sampled and converted into digital signals for processing.
- Control Algorithms: Implemented digitally, including PID, hysteresis, predictive, and model-based controls.
- PWM Generation: Digital control units generate precise Pulse Width Modulation signals to drive power switches.
- Feedback Loops: Closed-loop control using sensor feedback to maintain desired output.
- Communication Interfaces: For diagnostics, parameter tuning, and integration with vehicle networks.
Mind Map: Digital Control Implementation Overview
Choosing Between Microcontrollers and DSPs
| Feature | Microcontrollers (MCUs) | Digital Signal Processors (DSPs) |
|---|---|---|
| Processing Power | Moderate, suitable for simpler control | High, optimized for complex algorithms |
| Real-Time Performance | Good for many applications | Excellent for high-speed control loops |
| Cost | Generally lower | Higher, justified by performance |
| Development Complexity | Easier, large community support | More complex, specialized tools |
| Common Use Cases | Basic DC-DC converters, simple motor control | Advanced motor control, model predictive control |
Practical Example: Implementing a PID Controller for a DC-DC Converter Using an MCU
Scenario: Regulate the output voltage of a buck converter to 12 V from a 48 V battery pack.
Step 1: Hardware Setup
- MCU with built-in ADC and PWM modules (e.g., STM32F4 series).
- Voltage sensor connected to ADC input.
- PWM output driving the buck converter’s MOSFET gate.
Step 2: Software Implementation
- Sample output voltage via ADC at 10 kHz.
- Compute error:
error = V_ref - V_measured. - Apply PID algorithm to calculate duty cycle.
- Update PWM duty cycle accordingly.
Step 3: Tuning and Testing
- Tune PID gains (Kp, Ki, Kd) to achieve stable and fast response.
- Test under varying load conditions.
Code Snippet (Pseudo-C):
float V_ref = 12.0;
float Kp = 0.5, Ki = 0.1, Kd = 0.01;
float integral = 0, previous_error = 0;
void control_loop() {
float V_measured = read_ADC();
float error = V_ref - V_measured;
integral += error * dt;
float derivative = (error - previous_error) / dt;
float output = Kp * error + Ki * integral + Kd * derivative;
previous_error = error;
// Limit output between 0 and 1
if (output > 1.0) output = 1.0;
if (output < 0.0) output = 0.0;
set_PWM_duty_cycle(output);
}
Mind Map: PID Control Implementation Flow
Advanced Example: Using a DSP for Space Vector PWM in a Three-Phase Motor Drive
Scenario: Control a three-phase induction motor in an EV using space vector PWM (SVPWM) for improved efficiency and reduced harmonic distortion.
Key Steps:
- Use a DSP (e.g., TI C2000) with fast ADC and PWM peripherals.
- Sample phase currents and voltages.
- Calculate reference voltage vector based on speed and torque commands.
- Compute switching vectors and duty cycles using SVPWM algorithm.
- Update PWM outputs at high frequency (e.g., 20 kHz).
Benefits:
- Higher DC bus utilization.
- Lower switching losses.
- Improved motor torque smoothness.
Mind Map: SVPWM Control Implementation
Best Practices for Digital Control Implementation
- Use fixed-point arithmetic on MCUs with limited floating-point support to optimize speed.
- Implement anti-windup techniques in PID controllers to prevent integral saturation.
- Ensure ADC sampling is synchronized with PWM to minimize noise and latency.
- Use hardware timers and interrupts for precise timing control.
- Validate algorithms via simulation before hardware implementation.
- Incorporate watchdog timers and fault handling for system robustness.
Summary
Digital control using microcontrollers and DSPs is essential for modern EV power electronics. By leveraging their processing capabilities, engineers can implement sophisticated control algorithms that enhance system efficiency, reliability, and adaptability. Practical implementation involves careful hardware selection, algorithm design, and real-time software development, supported by best practices and thorough testing.
10.4 Practical Example: Implementing a PID Controller for DC-DC Converter Regulation
Introduction
A PID (Proportional-Integral-Derivative) controller is a widely used feedback control loop mechanism in power electronics for regulating output voltage or current. In DC-DC converters, PID controllers help maintain a stable output voltage despite input voltage variations or load changes.
Objective
Design and implement a PID controller to regulate the output voltage of a buck converter, ensuring the output remains steady at a desired reference voltage.
Step 1: Understand the System
- Plant: Buck converter
- Input: PWM duty cycle (control variable)
- Output: Output voltage (measured and fed back)
- Goal: Maintain output voltage at a set reference (e.g., 12 V)
Mind Map: PID Controller Components and Their Roles
Step 2: Define the Control Loop
- Measure output voltage (V_out)
- Calculate error: e(t) = V_ref - V_out
- Apply PID algorithm to compute control signal (duty cycle adjustment)
- Update PWM duty cycle accordingly
Step 3: PID Algorithm Implementation
The PID output u(t) is given by:
\[ u(t) = K_p e(t) + K_i \int e(t) dt + K_d \frac{de(t)}{dt} \]
Where:
- \(K_p\) = proportional gain
- \(K_i\) = integral gain
- \(K_d\) = derivative gain
Mind Map: PID Tuning Parameters
Step 4: Example Code Snippet (Pseudocode)
// Variables
float V_ref = 12.0; // Reference voltage in volts
float V_out; // Measured output voltage
float error, prev_error = 0;
float integral = 0;
float derivative;
float dt = 0.001; // Control loop time step (1 ms)
// PID gains
float Kp = 0.6;
float Ki = 0.3;
float Kd = 0.05;
// Control loop
while(1) {
V_out = measureOutputVoltage();
error = V_ref - V_out;
integral += error * dt;
derivative = (error - prev_error) / dt;
float control_signal = Kp * error + Ki * integral + Kd * derivative;
// Limit control signal between 0 and 1 (0% to 100% duty cycle)
if(control_signal > 1.0) control_signal = 1.0;
else if(control_signal < 0.0) control_signal = 0.0;
setPWMDutyCycle(control_signal);
prev_error = error;
delay(dt * 1000); // Wait for next control loop iteration
}
Step 5: Practical Considerations and Best Practices
- Sampling Rate: Choose a control loop frequency high enough to respond to changes but not too high to cause noise amplification.
- Anti-Windup: Implement integral windup protection to prevent integral term from accumulating excessively during saturation.
- Filtering: Use low-pass filters on measured voltage to reduce noise affecting derivative term.
- Tuning: Start with \(K_i\) and \(K_d\) at zero, increase \(K_p\) until system oscillates, then adjust \(K_i\) and \(K_d\) to improve stability.
Mind Map: Anti-Windup Strategy
Step 6: Simulation Example
Use MATLAB/Simulink or similar tools to simulate the buck converter with PID control:
- Model buck converter dynamics
- Implement PID block
- Simulate step changes in load or input voltage
- Observe output voltage regulation
Summary
Implementing a PID controller for DC-DC converter regulation involves:
- Measuring output voltage and calculating error
- Applying PID control law to adjust PWM duty cycle
- Tuning PID gains for stable and responsive control
- Incorporating practical techniques like anti-windup and filtering
This approach ensures reliable voltage regulation in EV power electronics applications, improving system stability and performance.
11. Reliability and Fault Tolerance in EV Power Electronics
11.1 Common Failure Modes and Causes
Power electronics in electric vehicles (EVs) are critical for efficient energy conversion and motor control. However, these systems are prone to various failure modes that can impact reliability, safety, and performance. Understanding these failure modes and their root causes is essential for designing robust systems and implementing effective diagnostics.
Mind Map: Common Failure Modes in EV Power Electronics
Thermal Failures
Cause: Power semiconductor devices such as MOSFETs and IGBTs generate heat during switching and conduction. Excessive heat without adequate dissipation leads to device degradation or catastrophic failure.
Example: An inverter module in an EV experiences thermal runaway due to a blocked cooling channel, causing the IGBTs to fail.
Best Practice: Use proper heat sinks, thermal interface materials, and implement temperature sensors for real-time monitoring.
Electrical Failures
- Overvoltage: Can occur due to regenerative braking spikes or load transients.
- Overcurrent: Caused by short circuits or motor stall conditions.
- Short Circuits: Often due to insulation breakdown or solder bridging.
- Open Circuits: Broken traces or connectors.
Example: A DC-DC converter fails because a sudden voltage spike exceeded the device’s maximum rating, causing permanent damage.
Best Practice: Incorporate protection circuits such as TVS diodes, fuses, and current sensors.
Mind Map: Electrical Failure Causes
Mechanical Failures
Cause: Mechanical stresses from vibration, thermal cycling, or improper assembly can cause solder joint cracks, connector loosening, or PCB delamination.
Example: An EV charging station’s power module intermittently fails due to cracked solder joints caused by repeated thermal cycling.
Best Practice: Use vibration-resistant soldering techniques, secure connectors properly, and select materials with compatible thermal expansion coefficients.
Environmental Failures
Cause: Exposure to moisture, dust, corrosive agents, or extreme temperatures can degrade components and PCB materials.
Example: Corrosion on PCB traces in a charging station due to moisture ingress leads to intermittent faults.
Best Practice: Implement conformal coatings, use sealed enclosures, and ensure proper ingress protection (IP) ratings.
Control Failures
Cause: Faulty sensors, software bugs, or communication errors can cause incorrect operation or shutdown of power electronics.
Example: A motor controller shuts down unexpectedly because a hall sensor provides erroneous speed feedback.
Best Practice: Use redundant sensors, implement robust software validation, and design error detection and recovery mechanisms.
Mind Map: Control Failure Causes
Summary Table of Failure Modes, Causes, and Examples
| Failure Mode | Common Causes | Example Scenario | Best Practice |
|---|---|---|---|
| Thermal Failures | Overheating, poor heat dissipation | IGBT failure due to blocked cooling | Use heat sinks, thermal sensors |
| Electrical Failures | Overvoltage, overcurrent, shorts | DC-DC converter damaged by voltage spike | Protection circuits (TVS, fuses) |
| Mechanical Failures | Vibration, thermal cycling | Cracked solder joints in charging station power module | Vibration-resistant soldering, secure connectors |
| Environmental Failures | Moisture, corrosion | PCB corrosion from moisture ingress | Conformal coating, sealed enclosures |
| Control Failures | Sensor faults, software bugs | Motor controller shutdown from faulty hall sensor | Redundant sensors, robust software validation |
Understanding these failure modes and their causes enables EV technicians, power engineers, and students to design more reliable power electronics systems, implement preventive maintenance, and troubleshoot effectively.
11.2 Redundancy and Fault Detection Techniques
In electric vehicle (EV) power electronics, ensuring system reliability and safety is paramount. Redundancy and fault detection techniques are critical strategies to maintain continuous operation and prevent catastrophic failures. This section explores these techniques in detail, providing practical examples and mind maps to clarify concepts.
What is Redundancy?
Redundancy involves incorporating additional components or systems that can take over in case of a failure. This ensures that the EV power electronics continue functioning without interruption.
Types of Redundancy
Redundancy Techniques Mind Map
Hardware Redundancy
- Parallel Redundancy: Multiple identical components operate simultaneously. If one fails, others continue the operation.
- Standby Redundancy: Backup components remain idle until a failure is detected.
Software Redundancy
- Watchdog Timers: Monitor system health and reset the system if it becomes unresponsive.
- Checkpointing: Periodically save system states to recover from faults.
Information Redundancy
- Error Detection Codes: Use of CRC, parity bits to detect data corruption.
Fault Detection Techniques
Fault detection is the process of identifying abnormal conditions or failures in power electronics components early enough to take corrective action.
Fault Detection Techniques Mind Map
Parameter Monitoring
Continuous measurement of key parameters such as voltage, current, and temperature to detect deviations from normal ranges.
Signal Analysis
Analyzing electrical signals for anomalies like unexpected harmonics or transient spikes.
Diagnostic Algorithms
- Model-Based: Compare real-time data with expected behavior from mathematical models.
- Data-Driven: Use machine learning or statistical methods to detect faults.
Practical Examples
Example 1: Parallel Redundancy in Inverter Modules
In a three-phase inverter, two identical inverter modules can be connected in parallel. If one module’s output current drops unexpectedly, the system detects the fault via current sensors and seamlessly switches load to the healthy module without interrupting motor operation.
Parallel Redundancy Example Mind Map
Example 2: Watchdog Timer for DC-DC Converter Control
A microcontroller controlling a DC-DC converter uses a watchdog timer. If the control algorithm hangs due to a software fault, the watchdog timer resets the microcontroller, restoring normal operation.
Example 3: Temperature Monitoring for IGBT Protection
IGBT modules in an EV inverter are equipped with temperature sensors. If temperature exceeds safe limits, the fault detection system triggers a controlled shutdown or reduces power to prevent damage.
Temperature Monitoring Example Mind Map
Best Practices for Implementing Redundancy and Fault Detection
- Design for Fail-Safe Operation: Ensure that in case of failure, the system defaults to a safe state.
- Use Multiple Fault Detection Methods: Combine parameter monitoring with signal analysis for robust detection.
- Regular Testing and Diagnostics: Periodically test redundancy systems and fault detection algorithms.
- Clear Fault Logging and Alerts: Implement detailed logging and real-time alerts for maintenance.
Summary
Redundancy and fault detection techniques are essential for the reliability and safety of EV power electronics. By combining hardware and software redundancy with comprehensive fault detection methods, EV systems can achieve high availability and protect critical components from damage.
11.3 Design for Maintainability and Diagnostics
Designing power electronics for electric vehicles (EVs) with maintainability and diagnostics in mind is crucial to ensure long-term reliability, reduce downtime, and facilitate efficient troubleshooting. This section explores best practices, strategies, and practical examples to embed maintainability and diagnostic capabilities into EV power electronics systems.
Key Principles of Maintainability and Diagnostics
- Modularity: Designing components and subsystems as modular units to simplify replacement and upgrades.
- Accessibility: Ensuring critical components and connectors are easily accessible for inspection and repair.
- Standardized Interfaces: Using standardized connectors and communication protocols to ease diagnostics and integration.
- Built-in Self-Test (BIST): Embedding self-test capabilities to detect faults automatically.
- Comprehensive Monitoring: Integrating sensors and monitoring circuits to track system health in real-time.
- Clear Fault Reporting: Implementing clear and actionable fault codes and status indicators.
- Documentation: Providing detailed schematics, wiring diagrams, and diagnostic procedures.
Mind Map: Design for Maintainability and Diagnostics
Practical Example 1: Modular Inverter Design
Scenario: Designing an inverter module for an EV traction system that supports easy maintenance and diagnostics.
Implementation:
- The inverter is split into three modular PCBs: power stage, gate driver, and control board.
- Each module connects via standardized, keyed connectors allowing quick swaps.
- The control board includes a microcontroller running BIST routines on startup to verify gate driver signals and power device health.
- Temperature sensors are embedded on power devices and communicated to the vehicle ECU via CAN bus.
- Fault conditions such as overcurrent, overtemperature, and gate driver faults trigger specific diagnostic trouble codes (DTCs) logged in the vehicle’s diagnostic system.
- LEDs on the inverter enclosure provide immediate visual status indication for technicians.
Benefits:
- Faulty modules can be replaced without desoldering or complex repairs.
- Early fault detection prevents catastrophic failures.
- Clear diagnostics reduce troubleshooting time.
Mind Map: Modular Inverter Design Example
Practical Example 2: Diagnostic-Enabled DC-DC Converter
Scenario: A 12V DC-DC converter used in EV auxiliary systems with integrated diagnostic features.
Implementation:
- The converter includes current and voltage sensors feeding data to a microcontroller.
- The microcontroller runs continuous monitoring algorithms to detect abnormal conditions such as output voltage drift, overcurrent, or thermal runaway.
- Upon detecting a fault, the system logs the event with a timestamp and communicates it to the vehicle’s central diagnostic system.
- The converter supports a UART interface for direct diagnostic access during maintenance.
- A simple LCD or LED bar graph on the converter enclosure shows real-time output voltage and fault status.
Benefits:
- Enables predictive maintenance by identifying degrading components early.
- Facilitates quick fault isolation with detailed logs.
- Simplifies technician interaction with direct diagnostic interfaces.
Mind Map: Diagnostic-Enabled DC-DC Converter
Best Practices Summary
| Practice | Description | Example Application |
|---|---|---|
| Modular Design | Design subsystems as replaceable modules | Modular inverter PCBs |
| Embedded Self-Test | Implement automatic startup and runtime tests | BIST routines in inverter control board |
| Comprehensive Sensing | Use sensors to monitor temperature, current, voltage, and vibration | Temperature sensors on power devices |
| Clear Fault Reporting | Use standardized fault codes and visual indicators | DTCs communicated over CAN bus |
| Accessible Layout | Arrange components for easy access and replacement | Service panels and plug-and-play connectors |
| Standardized Communication | Employ common protocols for diagnostics and control | CAN, UART interfaces |
| Detailed Documentation | Provide thorough schematics and troubleshooting guides | Maintenance manuals and wiring diagrams |
By integrating these maintainability and diagnostic design principles, EV power electronics systems become more reliable, easier to service, and better equipped to handle faults proactively, ultimately improving vehicle uptime and user satisfaction.
11.4 Practical Example: Implementing Overcurrent Protection in an Inverter
Introduction
Overcurrent protection is a critical safety feature in inverter design, especially in electric vehicles (EVs), where inverter failure can lead to severe damage to the motor, power electronics, or even pose safety hazards. This section provides a practical approach to implementing overcurrent protection in an inverter, integrating best practices with clear examples and mind maps to aid understanding.
What is Overcurrent Protection?
Overcurrent protection detects and interrupts excessive current flow beyond the inverter’s rated capacity to prevent damage.
Key Objectives:
- Protect semiconductor devices (IGBTs, MOSFETs)
- Prevent thermal runaway
- Avoid damage to the motor windings
- Ensure system safety and reliability
Mind Map: Overcurrent Protection Overview
Step 1: Current Sensing
Example: Using a Hall Effect Current Sensor
- Place the Hall sensor on the inverter output line to measure motor current.
- Sensor outputs an analog voltage proportional to current.
Best Practice:
- Choose sensors with fast response time and appropriate current range.
- Calibrate sensors to minimize offset and noise.
Mind Map: Current Sensing Techniques
Step 2: Signal Conditioning and ADC Conversion
- Amplify and filter the sensor output to reduce noise.
- Use a high-resolution ADC in the microcontroller or DSP for digitization.
Example: Implement a low-pass filter with a cutoff frequency of 10 kHz to remove switching noise.
Step 3: Threshold Setting and Fault Detection Logic
- Define overcurrent threshold based on inverter and motor ratings.
- Implement software logic to compare sensed current against threshold.
Example:
#define OVERCURRENT_THRESHOLD 100.0 // Amps
float current_measured = read_current_sensor();
if(current_measured > OVERCURRENT_THRESHOLD) {
trigger_overcurrent_fault();
}
Best Practice:
- Use a time delay or debounce logic to avoid nuisance trips caused by transient spikes.
Mind Map: Fault Detection Logic
Step 4: Response Mechanism
- Upon fault detection, immediately disable inverter gate signals to stop current flow.
- Notify higher-level control systems and log the fault.
Example:
void trigger_overcurrent_fault() {
disable_inverter_gates();
log_fault("Overcurrent detected");
alert_system_controller();
}
Best Practice:
- Design hardware interlocks for emergency shutdown.
- Implement safe restart procedures after fault clearance.
Step 5: Testing and Validation
- Use a programmable DC load or motor emulator to simulate overcurrent conditions.
- Verify sensor accuracy, fault detection timing, and inverter shutdown response.
Example:
- Gradually increase load current until threshold is exceeded.
- Measure time from fault occurrence to inverter shutdown.
Mind Map: Testing Procedure
Summary Table: Overcurrent Protection Implementation
| Step | Description | Example | Best Practice |
|---|---|---|---|
| 1 | Current Sensing | Hall Effect Sensor on output line | Fast response, calibration |
| 2 | Signal Conditioning | Low-pass filter at 10 kHz | Noise reduction |
| 3 | Fault Detection | Threshold check in firmware | Time delay to avoid false trips |
| 4 | Response | Disable inverter gates, log fault | Hardware interlocks, safe restart |
| 5 | Testing | Load emulator to simulate fault | Measure response time, validate logic |
Additional Example: Using Shunt Resistor for Overcurrent Detection
- Place a low-value resistor in series with the inverter output.
- Measure voltage drop across resistor to calculate current.
- Use differential amplifier for signal conditioning.
Pros: Simple, low cost.
Cons: Power loss, heat generation.
Implementation Tip: Use a 0.001 Ω resistor rated for power dissipation and ensure proper thermal management.
Conclusion
Implementing robust overcurrent protection in EV inverters is essential for device longevity and safety. By combining accurate current sensing, reliable fault detection logic, and prompt response mechanisms, engineers can design systems that effectively mitigate overcurrent risks. Testing and validation complete the cycle, ensuring real-world reliability.
References
- Rashid, M. H. (2017). Power Electronics: Circuits, Devices, and Applications.
- IEEE Std 1547-2018: Standard for Interconnection and Interoperability of Distributed Energy Resources.
- Texas Instruments Application Notes on Current Sensing and Protection.
12. Emerging Technologies and Trends in EV Power Electronics
12.1 Wide Bandgap Semiconductors: SiC and GaN
Wide Bandgap (WBG) semiconductors, primarily Silicon Carbide (SiC) and Gallium Nitride (GaN), are revolutionizing power electronics in electric vehicles (EVs) and charging infrastructure. Their superior electrical properties enable higher efficiency, higher switching frequencies, and better thermal performance compared to traditional silicon devices.
What Are Wide Bandgap Semiconductors?
- Definition: Semiconductors with a larger bandgap energy than silicon (~1.1 eV), typically >2.5 eV.
- Common Types: SiC (~3.3 eV), GaN (~3.4 eV).
Key Advantages of WBG Semiconductors
- Higher breakdown voltage
- Higher thermal conductivity
- Faster switching speeds
- Lower conduction and switching losses
- Operation at higher temperatures
Mind Map: Wide Bandgap Semiconductors Overview
Silicon Carbide (SiC)
- Material Characteristics: Robust, high thermal conductivity (~3.7 W/cm·K), high breakdown field (~3 MV/cm).
- Common Devices: SiC MOSFETs, Schottky diodes.
- Applications in EVs: Traction inverters, onboard chargers, DC-DC converters.
Example:
A SiC MOSFET-based inverter can switch at 100 kHz compared to 20-30 kHz for silicon IGBTs, reducing the size of passive components and improving power density.
Best Practice:
- Use SiC MOSFETs in high voltage (>400 V) traction inverters to improve efficiency and reduce cooling requirements.
- Implement proper gate driver design to handle fast switching and avoid voltage overshoot.
Gallium Nitride (GaN)
- Material Characteristics: Very high electron mobility, high breakdown voltage, but lower thermal conductivity (~1.3 W/cm·K) than SiC.
- Common Devices: GaN HEMTs (High Electron Mobility Transistors).
- Applications in EVs: High-frequency DC-DC converters, onboard chargers, auxiliary power supplies.
Example:
GaN transistors enable switching frequencies above 1 MHz, allowing ultra-compact and lightweight DC-DC converters for EV auxiliary systems.
Best Practice:
- Use GaN devices in low to medium voltage (<600 V) applications where high switching frequency and efficiency are critical.
- Design PCB layouts carefully to minimize parasitic inductances that can cause ringing due to fast switching.
Comparative Mind Map: SiC vs GaN
Practical Example: Designing a SiC-Based High-Voltage Inverter Stage
Scenario:
Design a 400 V traction inverter using SiC MOSFETs.
Steps:
- Device Selection: Choose SiC MOSFETs rated for 650 V, with low R_DS(on) to minimize conduction losses.
- Gate Driver: Use isolated gate drivers capable of fast switching and adjustable gate resistors.
- Thermal Management: Design a cooling system (liquid or forced air) to maintain device junction temperature below 150°C.
- EMI Mitigation: Implement snubbers and proper PCB layout to reduce voltage overshoot and ringing.
- Control Strategy: Use Space Vector PWM to optimize switching and reduce harmonic distortion.
Outcome:
- Increased inverter efficiency by 3-5% compared to silicon IGBTs.
- Reduced size and weight of passive components due to higher switching frequency.
- Improved thermal performance leading to longer device lifetime.
Practical Example: GaN-Based High-Frequency DC-DC Converter for EV Auxiliary Power
Scenario:
Design a 48 V to 12 V DC-DC converter using GaN HEMTs.
Steps:
- Device Selection: Select GaN transistors with voltage rating ~100 V and low gate charge.
- Switching Frequency: Target 1 MHz switching frequency to minimize passive component size.
- PCB Layout: Use compact layout with short gate loops to reduce parasitic inductance.
- Thermal Design: Use heat sinks and thermal vias to dissipate heat effectively.
- Control: Implement synchronous rectification and digital control for precise regulation.
Outcome:
- Achieved over 95% efficiency.
- Reduced converter size by 50% compared to silicon-based designs.
- Enabled lighter and more compact auxiliary power supply for EV systems.
Summary
Wide Bandgap semiconductors SiC and GaN provide transformative benefits for EV power electronics by enabling higher efficiency, higher switching frequencies, and better thermal performance. Selecting the right device depends on the application voltage, switching frequency, and thermal requirements. Incorporating these devices with best practices in gate driving, thermal management, and layout design is key to unlocking their full potential.
12.2 Wireless Charging Power Electronics
Wireless charging for electric vehicles (EVs) is an emerging technology that offers convenience and efficiency by enabling contactless energy transfer. This section delves into the power electronics aspects of wireless charging systems, highlighting design principles, components, challenges, and practical examples.
Overview of Wireless Charging Systems
Wireless charging systems for EVs typically consist of two main parts:
- Primary Side (Transmitter): Connected to the grid or charging source, it generates an alternating magnetic field.
- Secondary Side (Receiver): Mounted on the EV, it captures the magnetic field and converts it back to electrical energy to charge the battery.
The power electronics on both sides are critical for efficient energy transfer, system control, and safety.
Mind Map: Wireless Charging Power Electronics Components
Key Power Electronics Design Considerations
-
Resonant Inverter Topologies:
- Class E and Class D inverters are commonly used for generating high-frequency AC signals with high efficiency.
- Example: A Class E inverter operating at 85 kHz can achieve over 90% efficiency in power transfer.
-
Frequency Tuning and Control:
- The system must dynamically adjust the operating frequency to maintain resonance despite coil misalignment or load changes.
- Best practice: Use microcontroller-based feedback loops to monitor coil voltage and current for frequency adjustment.
-
Rectification and DC-DC Conversion:
- On the receiver side, synchronous rectifiers reduce conduction losses compared to diode bridges.
- Followed by a DC-DC converter to stabilize voltage for battery charging.
-
EMI Mitigation:
- High-frequency switching generates electromagnetic interference.
- Use EMI filters and proper PCB layout to minimize noise.
-
Thermal Management:
- Power electronics components generate heat; cooling strategies must be integrated.
Practical Example: Designing a Wireless Charging Power Stage
Scenario: Design the primary side inverter and secondary side rectifier for a 3.3 kW wireless EV charger operating at 85 kHz.
Primary Side:
- Use a Class E resonant inverter with a MOSFET rated for 600 V and 30 A.
- Design the resonant tank circuit with a coil inductance of 20 µH and a resonant capacitor of 10 nF.
- Implement a microcontroller-based control system to adjust frequency between 80-90 kHz based on feedback.
Secondary Side:
- Use synchronous rectification with low R_DS(on) MOSFETs to reduce losses.
- Follow with a synchronous buck converter to regulate output voltage to 400 V for the battery pack.
Best Practice:
- Include overcurrent and overvoltage protection circuits on both sides.
- Use shielded coils and EMI filters to comply with EMC standards.
Mind Map: Control Strategy for Wireless Charging Power Electronics
Example: Foreign Object Detection (FOD) Implementation
Problem: Metallic foreign objects between coils can heat up dangerously.
Solution:
- Monitor coil impedance changes using power electronics feedback.
- If impedance deviates beyond threshold, reduce power or shut down inverter.
Implementation:
- Use current and voltage sensors on the primary side.
- Microcontroller analyzes phase shift and power factor.
- Trigger safety shutdown if anomaly detected.
Summary
Wireless charging power electronics combine resonant inverter design, precise control strategies, efficient rectification, and robust safety mechanisms. By integrating these elements with practical design considerations and examples, engineers can develop reliable and efficient wireless EV charging systems that enhance user convenience and system performance.
12.3 Integration of AI and Machine Learning for Power Electronics Control
Introduction
The integration of Artificial Intelligence (AI) and Machine Learning (ML) into power electronics control for electric vehicles (EVs) represents a transformative approach to enhancing efficiency, reliability, and adaptability. Traditional control methods rely heavily on fixed algorithms and models, whereas AI/ML enables dynamic, data-driven decision-making that can optimize system performance in real time.
Why AI and ML in Power Electronics?
- Adaptive Control: AI can adjust control parameters dynamically to changing conditions such as temperature, load, and battery state.
- Fault Detection and Prediction: ML models can detect anomalies and predict failures before they occur, improving reliability.
- Optimization: AI algorithms can optimize switching patterns, reduce losses, and improve thermal management.
- Complex System Handling: AI can manage nonlinearities and uncertainties better than traditional controllers.
Key AI/ML Techniques Used
- Supervised Learning: For fault classification and parameter estimation.
- Reinforcement Learning: For adaptive control and optimization of switching strategies.
- Neural Networks: For modeling nonlinear system behavior and predictive control.
- Support Vector Machines (SVM): For classification tasks such as fault detection.
Mind Map: AI/ML Integration in EV Power Electronics Control
Practical Example 1: Neural Network-Based Inverter Control
Scenario: Using a neural network to optimize the PWM switching signals in a three-phase inverter driving an EV motor.
Approach:
- Collect training data from the inverter under various load and speed conditions.
- Train a neural network to predict optimal switching angles that minimize harmonic distortion and losses.
- Deploy the trained model in the inverter controller for real-time switching signal generation.
Benefits:
- Reduced Total Harmonic Distortion (THD).
- Improved efficiency and smoother motor operation.
Mind Map: Neural Network-Based Inverter Control
Practical Example 2: Reinforcement Learning for DC-DC Converter Efficiency
Scenario: Applying reinforcement learning (RL) to dynamically adjust the duty cycle of a DC-DC converter in an EV to maximize efficiency under varying load and input voltage.
Approach:
- Define the RL environment with states (input voltage, load current), actions (duty cycle adjustments), and rewards (efficiency metrics).
- Train an RL agent through simulation to learn optimal control policies.
- Implement the trained agent on embedded hardware for real-time control.
Benefits:
- Adaptive control that continuously optimizes efficiency.
- Ability to handle nonlinearities and uncertainties without explicit modeling.
Mind Map: Reinforcement Learning for DC-DC Converter
Practical Example 3: Fault Detection Using Support Vector Machines (SVM)
Scenario: Using SVM classifiers to detect and classify faults in EV power electronics modules based on sensor data.
Approach:
- Collect labeled datasets of normal operation and various fault conditions (e.g., short circuits, open circuits).
- Extract features such as voltage spikes, current anomalies, and temperature deviations.
- Train an SVM classifier to distinguish between normal and fault states.
- Deploy the classifier in the vehicle’s diagnostic system for real-time monitoring.
Benefits:
- Early fault detection reduces downtime.
- Enhances safety by timely fault isolation.
Mind Map: SVM-Based Fault Detection
Best Practices for AI/ML Integration in EV Power Electronics
- Data Quality: Ensure high-quality, representative datasets for training.
- Real-Time Constraints: Optimize models for low-latency inference suitable for embedded systems.
- Hybrid Control: Combine AI/ML with traditional control methods for reliability.
- Continuous Learning: Implement online learning or periodic retraining to adapt to system aging.
- Safety and Validation: Thoroughly validate AI/ML models under diverse conditions to ensure safety.
Summary
Integrating AI and ML into power electronics control for EVs unlocks new levels of adaptability, efficiency, and fault tolerance. Through examples like neural network-based inverter control, reinforcement learning for DC-DC converters, and SVM fault detection, engineers can leverage data-driven techniques to enhance system performance. Mindful implementation and adherence to best practices ensure these advanced methods translate into practical, reliable solutions in electric transportation.
12.4 Practical Example: Designing a SiC-based High-Frequency DC-DC Converter
Introduction
Silicon Carbide (SiC) devices have revolutionized power electronics by enabling higher switching frequencies, improved efficiency, and reduced thermal management requirements compared to traditional silicon devices. In this example, we will design a high-frequency DC-DC converter using SiC MOSFETs, focusing on practical design considerations, best practices, and real-world examples.
Step 1: Define Design Specifications
- Input Voltage: 400 V (typical EV battery pack voltage)
- Output Voltage: 48 V (auxiliary system voltage)
- Output Power: 3 kW
- Switching Frequency: 200 kHz (enabled by SiC devices)
- Efficiency Target: >95%
Step 2: Select Converter Topology
For high-frequency and high-efficiency applications, the Full-Bridge Phase-Shifted (FB-PS) Converter is a popular choice.
Mind Map: Converter Topology Selection
Step 3: SiC MOSFET Selection Criteria
- Voltage Rating: Minimum 650 V (to provide margin over 400 V input)
- Current Rating: At least 20 A continuous (considering peak currents)
- Low R_DS(on) for reduced conduction losses
- Fast switching capability to enable 200 kHz operation
Example Device: Wolfspeed C3M0065090K SiC MOSFET (900 V, 36 mΩ, 30 A)
Best Practice: Always select devices with voltage and current ratings at least 20-30% higher than maximum operating conditions to ensure reliability.
Step 4: Magnetic Component Design
- Transformer design for galvanic isolation and voltage scaling
- High-frequency ferrite core selection
- Minimize leakage inductance to reduce switching losses and voltage spikes
Mind Map: Transformer Design Considerations
Example: For 400 V to 48 V conversion, a turns ratio of approximately 8.3:1 is used.
Step 5: Gate Driver and Control Circuit
- Use isolated gate drivers compatible with SiC MOSFET gate charge and voltage levels
- Implement dead-time control to avoid shoot-through
- Employ phase-shift modulation for ZVS operation
Best Practice: Use gate resistors to control switching speed and reduce EMI, balancing switching losses and noise.
Step 6: Thermal Management
- SiC devices generate less heat but still require proper heat sinking
- Use thermal interface materials and heat sinks designed for high-frequency operation
Example: Attach SiC MOSFETs to an aluminum baseplate with thermal pads and forced air cooling.
Step 7: EMI Mitigation
- High switching frequency increases EMI risk
- Use snubber circuits, proper PCB layout, and shielding
Mind Map: EMI Mitigation Techniques
Step 8: Simulation and Validation
- Use simulation tools like MATLAB/Simulink or PLECS to model converter behavior
- Validate switching waveforms, efficiency, and thermal performance
Example: Simulate the phase-shifted full-bridge converter at 200 kHz and verify ZVS conditions.
Step 9: Prototyping and Testing
- Build prototype PCB with SiC MOSFETs and gate drivers
- Measure efficiency, thermal performance, and EMI emissions
- Adjust gate resistor values and dead-time for optimal performance
Summary Mind Map: SiC-based High-Frequency DC-DC Converter Design
Final Notes
Designing a SiC-based high-frequency DC-DC converter for EV applications requires careful integration of device selection, topology, thermal management, and EMI mitigation. By following best practices and leveraging SiC technology, engineers can achieve compact, efficient, and reliable power conversion solutions tailored for modern electric vehicles.
13. Case Studies and Real-World Applications
13.1 Power Electronics Design in a Commercial EV Model
Designing power electronics for a commercial electric vehicle (EV) involves integrating multiple subsystems to achieve optimal performance, efficiency, reliability, and safety. This section dives into the key design considerations, component selections, and practical examples from a typical commercial EV power electronics architecture.
Overview of Power Electronics in a Commercial EV
Power electronics in an EV primarily manage energy flow between the battery, motor, and charging infrastructure. The main subsystems include:
- Battery Management System (BMS)
- DC-DC Converters
- Inverter for Motor Drive
- Onboard Charger
Each subsystem requires careful design to meet the vehicle’s performance and safety standards.
Mind Map: Commercial EV Power Electronics Architecture
Key Design Considerations
-
Voltage Levels and Ratings
- Typical EV battery packs operate between 300V to 800V.
- Power electronics must be rated to handle these voltages with appropriate safety margins.
-
Efficiency
- High efficiency reduces energy loss and thermal stress.
- Use of wide bandgap devices (SiC, GaN) is increasingly common.
-
Thermal Management
- Power devices generate heat; effective cooling is critical.
- Example: Liquid cooling channels integrated into inverter housing.
-
Control and Communication
- Real-time control algorithms implemented on microcontrollers or DSPs.
- Communication protocols (CAN, LIN) for subsystem coordination.
-
Safety and Reliability
- Overcurrent, overvoltage, and short-circuit protections.
- Redundancy and fault detection in critical systems.
Practical Example: Designing the Inverter Stage for a Commercial EV
Scenario: Design a three-phase inverter to drive a 150 kW permanent magnet synchronous motor (PMSM) in a commercial EV.
Step 1: Device Selection
- Use SiC MOSFETs rated for 1200V and 100A continuous current.
- Benefits: Higher switching frequency, reduced losses.
Step 2: Topology
- Three-phase full-bridge inverter.
Step 3: Control Method
- Implement Space Vector PWM (SVPWM) for efficient motor control.
Step 4: Thermal Management
- Design aluminum baseplate with integrated liquid cooling channels.
Step 5: Protection
- Include overcurrent sensors and fast shutdown circuitry.
Step 6: EMI Mitigation
- Add LC filters at output.
- Use careful PCB layout to minimize parasitic inductances.
Mind Map: Inverter Design Workflow
Example: DC-DC Converter for Auxiliary Systems
In a commercial EV, a DC-DC converter steps down the high-voltage battery pack voltage (e.g., 400V) to 12V for auxiliary loads (lighting, infotainment).
- Topology: Isolated full-bridge converter for safety.
- Best Practice: Use synchronous rectification to improve efficiency.
- Example: Achieve >95% efficiency with proper MOSFET gate drive and soft switching.
Integration Challenges and Solutions
| Challenge | Solution Example |
|---|---|
| High voltage isolation | Use galvanic isolation transformers in DC-DC |
| Thermal hotspots in inverter | CFD simulation to optimize cooling channel design |
| EMI from switching devices | Multi-stage filtering and shielded enclosures |
| Communication latency | Use real-time CAN bus with prioritized messaging |
Summary
Designing power electronics for a commercial EV requires a holistic approach that balances performance, efficiency, safety, and cost. Leveraging modern semiconductor devices, advanced control techniques, and robust thermal and EMI management ensures a reliable and efficient EV powertrain.
This section provided a practical framework and examples to guide engineers and technicians through the complexities of commercial EV power electronics design.
13.2 Charging Station Power Electronics Deployment
Introduction
Charging stations are critical infrastructure components enabling electric vehicle (EV) adoption. The power electronics within these stations ensure efficient, safe, and reliable energy transfer from the grid to the EV battery. This section explores the deployment of power electronics in charging stations, focusing on practical design considerations, system architecture, and real-world examples.
Mind Map: Charging Station Power Electronics Deployment
Power Conversion Stages
Charging stations typically consist of multiple power conversion stages:
-
AC-DC Rectification: Converts grid AC voltage to a stable DC voltage. Active PFC circuits are often used here to improve power quality.
-
DC-DC Conversion: Steps the DC voltage up or down to match the EV battery requirements. This stage often includes galvanic isolation for safety.
-
Isolation and Safety: Transformers and optocouplers provide isolation between the grid and vehicle, ensuring user safety.
Example:
A 50kW DC fast charger uses a three-phase AC input. The power electronics include a diode bridge rectifier followed by an active PFC boost converter to maintain a stable DC bus voltage around 400V. A high-frequency isolated DC-DC converter then steps this voltage to the battery pack voltage (e.g., 350-400V) with tight regulation.
Key Components
-
Power Semiconductor Devices: IGBTs are commonly used in high-power stages due to their robustness, while MOSFETs are preferred in lower power or high-frequency stages.
-
Magnetics: High-quality transformers and inductors reduce losses and EMI.
-
Filters: EMI filters and LC filters ensure compliance with electromagnetic compatibility (EMC) standards.
Example:
In a 150kW charger, SiC MOSFETs are employed in the DC-DC stage to achieve higher switching frequencies (~100kHz), reducing the size of magnetics and improving efficiency.
Control and Communication
-
Power Factor Correction (PFC): Ensures the charger draws current in phase with voltage, minimizing reactive power.
-
Charging Protocols: Communication between the charger and EV is essential for safe charging. Protocols like CCS (Combined Charging System) and CHAdeMO define signaling and control.
-
Communication Interfaces: CAN bus and Power Line Communication (PLC) are widely used.
Example:
A Level 2 AC charger implements a single-phase PFC boost converter controlled via a digital signal processor (DSP). It communicates with the EV using the SAE J1772 protocol over the pilot line.
Thermal Management
Efficient cooling is vital to maintain reliability and performance.
- Air cooling is common in lower power chargers.
- Liquid cooling is preferred for high-power fast chargers.
Thermal sensors monitor device temperatures to trigger derating or shutdown if necessary.
Example:
A 350kW fast charger uses liquid cooling channels integrated into the power module heat sinks, monitored by thermistors connected to the control system.
Safety and Compliance
Charging stations must comply with international safety standards:
- Overcurrent and overvoltage protection circuits prevent damage.
- Isolation barriers protect users from electric shock.
- Compliance with IEC 61851 and UL 2202 ensures market acceptance.
Example:
A DC fast charger integrates a residual current device (RCD) and ground fault detection to meet IEC 61851-1 requirements.
Deployment Examples
| Charger Type | Power Level | Power Electronics Highlights |
|---|---|---|
| Level 2 AC Charger | Up to 19.2kW | Single-phase PFC, simple control, air cooling |
| DC Fast Charger | 50kW | Three-phase PFC, isolated DC-DC, liquid cooling |
| Ultra-fast Charger | 150-350kW | SiC devices, high-frequency switching, advanced cooling |
Example:
A commercial 50kW DC fast charger deployed in a parking lot uses a modular design with parallel-connected power modules. This allows easy maintenance and scalability.
Best Practices
- Modular Design: Facilitates maintenance and scalability.
- Scalability: Design power electronics to support different power levels with minimal redesign.
- Redundancy: Incorporate fault-tolerant features to maintain operation during partial failures.
Example:
A charging station manufacturer uses a modular DC-DC converter design where each module handles 10kW. For a 50kW charger, five modules operate in parallel with current sharing control.
Summary
Deploying power electronics in charging stations requires careful consideration of power conversion stages, component selection, control strategies, thermal management, and safety compliance. Practical examples demonstrate how these elements come together to build reliable, efficient, and scalable charging solutions.
13.3 Troubleshooting Common Power Electronics Issues in EVs
Troubleshooting power electronics in electric vehicles (EVs) is a critical skill for EV technicians and power engineers. Power electronics systems are complex and involve multiple components such as inverters, DC-DC converters, battery management systems, and onboard chargers. This section provides a structured approach to identifying and resolving common issues, supported by mind maps and practical examples.
Common Issues in EV Power Electronics
- Overheating
- Voltage irregularities
- Noise and EMI problems
- Component failures (semiconductors, capacitors, sensors)
- Communication faults between controllers
- Unexpected shutdowns or resets
Mind Map: Troubleshooting Approach for EV Power Electronics
Step-by-Step Troubleshooting Process
Symptom Identification
Start by clearly defining the problem. For example, is the inverter overheating during operation, or is the DC-DC converter output voltage unstable?
Visual and Physical Inspection
Check for obvious signs such as burnt components, loose connectors, damaged wiring, or signs of corrosion.
Electrical Measurements
Use a multimeter and oscilloscope to measure voltages, currents, and waveforms at key points. For example, verify the DC bus voltage, gate drive signals, and output waveforms.
Thermal Analysis
Use a thermal camera or temperature sensors to identify hotspots. Overheating components often indicate underlying issues such as overcurrent or poor heat dissipation.
Firmware and Communication Check
Check for error codes or fault logs using diagnostic software. Communication faults between the power electronics controller and other vehicle systems can cause malfunctions.
Component Testing and Replacement
Test suspect components such as MOSFETs, IGBTs, diodes, and capacitors using specialized testers. Replace faulty parts as needed.
Verification and Validation
After repairs, perform functional and load testing to ensure the issue is resolved and the system operates reliably under expected conditions.
Mind Map: Common Power Electronics Issues and Causes
Practical Example 1: Diagnosing Overheating Inverter Module
Scenario: An EV inverter module is shutting down after 10 minutes of operation due to overheating.
Troubleshooting Steps:
- Visual Inspection: Check for dust buildup on heat sinks and fans.
- Thermal Imaging: Identify hotspots on the inverter PCB.
- Electrical Measurement: Measure current draw to ensure it is within rated limits.
- Cooling System Check: Verify fan operation and airflow.
- Component Check: Test MOSFET junction temperatures and gate drive signals.
Findings: The thermal interface material between the MOSFETs and heat sink was degraded, causing poor heat transfer.
Solution: Replace thermal pads and clean heat sink surfaces. Verify fan operation and clean dust filters.
Practical Example 2: Resolving Voltage Fluctuations in DC-DC Converter
Scenario: The 12V DC-DC converter output voltage fluctuates under load, causing erratic behavior in vehicle electronics.
Troubleshooting Steps:
- Measure Output Voltage: Use an oscilloscope to observe ripple and transient responses.
- Inspect Capacitors: Look for bulging or leakage signs.
- Check Connections: Ensure all wiring and solder joints are secure.
- EMI Check: Use a spectrum analyzer to detect noise sources.
Findings: Several electrolytic capacitors showed increased ESR (Equivalent Series Resistance), reducing filtering effectiveness.
Solution: Replace faulty capacitors with low-ESR types and add additional LC filters to reduce noise.
Mind Map: Diagnostic Tools and Their Uses
Summary
Effective troubleshooting of EV power electronics requires a systematic approach combining symptom analysis, inspection, measurement, and testing. Utilizing appropriate diagnostic tools and understanding common failure modes helps quickly identify root causes. Integrating best practices such as maintaining good thermal management, ensuring solid connections, and adhering to EMI mitigation techniques can prevent many issues from occurring.
By mastering these troubleshooting techniques with practical examples and structured mind maps, EV technicians and power engineers can enhance system reliability and reduce downtime.
13.4 Practical Example: Retrofitting an EV with an Upgraded Inverter System
Retrofitting an electric vehicle (EV) with an upgraded inverter system is a practical way to enhance performance, improve efficiency, and extend the vehicle’s operational life. This section walks through the process step-by-step, integrating best practices and examples to guide EV technicians, power engineers, and electrical engineering students.
Overview
An inverter converts the DC voltage from the battery pack into AC voltage to drive the electric motor. Upgrading this component can lead to better torque control, higher efficiency, and improved thermal management.
Step 1: Assessing the Existing System
- Identify the current inverter specifications: voltage rating, current rating, switching frequency, topology.
- Evaluate motor compatibility: voltage, current, and control interface.
- Check mechanical and electrical interfaces: connectors, mounting points, cooling system.
Example: The existing inverter is a 300 V, 150 A IGBT-based three-phase inverter with PWM control driving a 3-phase induction motor.
Step 2: Defining Upgrade Goals
- Increase power output (e.g., from 45 kW to 60 kW).
- Improve efficiency by using wide bandgap devices (SiC MOSFETs).
- Enhance thermal management.
- Add advanced control features (e.g., field-oriented control).
Step 3: Selecting the New Inverter Components
- Power Semiconductors: SiC MOSFETs for higher switching frequency and lower losses.
- Gate Drivers: Isolated, with fast switching capability.
- Controller: DSP or microcontroller capable of advanced motor control algorithms.
- Cooling: Liquid cooling or enhanced heat sinks.
Step 4: Designing the New Inverter Circuit
- Topology: Three-phase full-bridge inverter.
- Switching Frequency: Increase from 10 kHz to 20 kHz for smoother motor operation.
- Protection: Overcurrent, overvoltage, and thermal shutdown circuits.
Step 5: Integration and Testing
- Mechanical Fit: Ensure the new inverter fits within the existing space.
- Electrical Connections: Match connectors or design adapters.
- Software: Develop or adapt firmware for motor control.
- Testing: Bench test with motor emulator before vehicle installation.
Mind Map: Retrofitting an EV with an Upgraded Inverter System
Example: Component Selection Table
| Component | Specification | Reason for Selection |
|---|---|---|
| Power Semiconductors | SiC MOSFET, 650 V, 100 A | Higher efficiency, faster switching |
| Gate Driver | Isolated, 20 kHz switching freq | Noise immunity, supports high freq |
| Controller | TI C2000 DSP | Real-time control, FOC support |
| Cooling | Liquid cooling system | Better heat dissipation |
Example: Firmware Control Algorithm Outline
- Initialize ADCs and PWM modules.
- Read motor current and voltage sensors.
- Implement Field-Oriented Control (FOC) algorithm:
- Clarke and Park transforms
- PI controllers for d/q axis currents
- Space Vector PWM generation
- Monitor fault conditions (overcurrent, overvoltage, temperature).
- Adjust PWM duty cycles accordingly.
Step 6: Road Testing and Validation
- Monitor inverter temperature and efficiency under load.
- Verify torque response and smoothness.
- Check for electromagnetic interference issues.
- Collect data for further optimization.
Best Practices Summary
- Thorough Assessment: Avoid compatibility issues by detailed initial evaluation.
- Use Wide Bandgap Devices: SiC MOSFETs improve efficiency and reduce size.
- Thermal Management: Design cooling early to prevent overheating.
- Robust Control Firmware: Implement advanced algorithms for smooth motor control.
- Comprehensive Testing: Bench and road tests ensure reliability.
This practical example illustrates how upgrading an EV inverter system involves multidisciplinary knowledge, from power electronics design to embedded control and mechanical integration. By following these steps and best practices, technicians and engineers can successfully retrofit EVs for improved performance and longevity.
14. Tools, Simulation, and Testing for EV Power Electronics
14.1 Simulation Software and Modeling Techniques
Simulation and modeling are indispensable tools in the design and development of power electronics systems for electric vehicles (EVs) and charging infrastructure. They enable engineers to predict system behavior, optimize performance, and identify potential issues before hardware implementation, saving time and cost.
Why Simulation is Critical in EV Power Electronics
- Validate circuit designs under various operating conditions
- Analyze thermal and electromagnetic behaviors
- Optimize control algorithms and system efficiency
- Facilitate hardware-in-the-loop (HIL) testing and prototyping
Popular Simulation Software for EV Power Electronics
| Software | Key Features | Typical Use Cases |
|---|---|---|
| MATLAB/Simulink | Block-diagram modeling, control design, Simscape Electrical | Control algorithm development, system-level simulation |
| PLECS | Specialized power electronics simulation, fast simulation speeds | Converter and inverter design, thermal modeling |
| LTspice | Circuit-level simulation, free and widely used | Detailed switching device simulation |
| PSIM | Power electronics and motor drive simulation | Motor drive systems, power converter design |
| ANSYS Icepak | Thermal simulation and CFD | Thermal management design |
| COMSOL Multiphysics | Multiphysics simulation including electromagnetics and heat transfer | Coupled thermal-electrical simulations |
Modeling Techniques
Behavioral Modeling
- Uses simplified mathematical models to represent system components
- Focuses on system-level behavior rather than device-level details
- Example: Modeling a DC-DC converter as an ideal switch with losses
Switching-Level Modeling
- Models the switching behavior of semiconductor devices
- Captures switching transients, losses, and EMI effects
- Example: Simulating MOSFET switching waveforms in an inverter
Thermal Modeling
- Simulates heat generation and dissipation in power electronics
- Helps design cooling systems and predict reliability
- Example: Thermal simulation of an IGBT module under load
Control System Modeling
- Models control loops and algorithms for power converters and motors
- Enables tuning and stability analysis
- Example: PID controller design for a buck converter
Mind Map: Simulation Software and Modeling Techniques
Practical Example 1: Modeling a Buck Converter in Simulink
Objective: Simulate a buck converter to step down 48V battery voltage to 12V for auxiliary systems.
Steps:
- Use Simscape Electrical blocks to build the buck converter circuit: MOSFET switch, diode, inductor, capacitor, and load.
- Implement a PWM generator to control the MOSFET switch.
- Add sensors to measure output voltage and current.
- Run the simulation to observe output voltage ripple and transient response.
- Tune the PWM duty cycle and filter components to optimize performance.
Outcome: Understand converter dynamics, efficiency, and transient behavior before hardware implementation.
Practical Example 2: Switching-Level Simulation of an Inverter Using LTspice
Objective: Analyze switching losses and voltage overshoot in a three-phase inverter leg.
Steps:
- Model MOSFETs with their switching characteristics and parasitic elements.
- Include gate driver circuits and snubber networks.
- Simulate switching transitions at different load currents.
- Observe voltage and current waveforms to identify overshoot and ringing.
- Adjust snubber parameters to reduce EMI and stress on devices.
Outcome: Optimize switching performance and improve inverter reliability.
Practical Example 3: Thermal Modeling of an IGBT Module in PLECS
Objective: Predict junction temperature of an IGBT module under continuous load.
Steps:
- Import the electrical model of the inverter stage.
- Define thermal parameters: junction-to-case resistance, heat sink characteristics.
- Simulate power losses during operation.
- Use the thermal network model to calculate temperature rise.
- Evaluate cooling requirements and adjust heat sink design.
Outcome: Ensure thermal reliability and prevent device failure.
Tips and Best Practices
- Start with behavioral models to quickly validate system concepts.
- Use switching-level models for detailed device analysis and EMI considerations.
- Incorporate thermal models early to avoid overheating issues.
- Validate simulation results with experimental data whenever possible.
- Modularize models to reuse components across projects.
Simulation and modeling are powerful enablers for efficient and reliable power electronics design in EVs. Mastery of these tools and techniques empowers engineers to innovate and optimize with confidence.
14.2 Hardware-in-the-Loop (HIL) Testing
Hardware-in-the-Loop (HIL) testing is a powerful technique used in the development and validation of power electronics systems for electric vehicles (EVs). It enables engineers to test real hardware components within a simulated environment, bridging the gap between pure simulation and real-world testing. This approach helps identify design flaws, improve control algorithms, and ensure system reliability before deployment.
What is HIL Testing?
HIL testing integrates actual hardware components (such as inverters, converters, or controllers) with a real-time simulation of the rest of the system (like the EV motor, battery, or grid). The hardware interacts with the simulated environment as if it were operating in the real world.
Benefits of HIL Testing in EV Power Electronics
- Risk Reduction: Detect faults early without risking expensive hardware or vehicles.
- Cost Efficiency: Reduce the need for costly prototype builds and physical testing.
- Accelerated Development: Quickly iterate control algorithms and hardware designs.
- Repeatability: Perform consistent tests under controlled conditions.
Key Components of a HIL Test Setup
- Real-Time Simulator: Runs the mathematical model of the EV system (motor, battery, grid, etc.) in real time.
- Device Under Test (DUT): The actual hardware component being tested (e.g., inverter, DC-DC converter).
- I/O Interfaces: Analog and digital interfaces to connect the DUT with the simulator.
- Control and Monitoring Software: For configuring tests, collecting data, and analyzing results.
Mind Map: Overview of HIL Testing Components
Typical HIL Testing Workflow
- Model Development: Create accurate real-time models of EV components (motor, battery, load).
- Hardware Setup: Connect the DUT to the HIL system via appropriate interfaces.
- Test Scenario Definition: Define operating conditions, faults, and edge cases.
- Execution: Run tests with real-time interaction between hardware and simulation.
- Data Collection & Analysis: Monitor system responses, identify issues, and validate performance.
- Iteration: Refine hardware or control algorithms based on results.
Mind Map: HIL Testing Workflow
Practical Example: HIL Testing of an EV Inverter
Objective: Validate the control algorithm and hardware robustness of a three-phase inverter used for EV traction motors.
Step 1: Model Setup
- Develop a real-time motor model simulating torque, speed, and back-EMF.
- Include battery voltage and load profiles.
Step 2: Hardware Connection
- Connect the inverter control board (DUT) to the HIL system.
- Use analog/digital I/O to exchange signals such as PWM commands, current feedback, and voltage measurements.
Step 3: Test Scenarios
- Normal operation at various speeds and loads.
- Fault injection: simulate short circuits, overcurrent, or sensor failures.
- Transient events: rapid acceleration or regenerative braking.
Step 4: Execution & Monitoring
- Run tests and monitor inverter output waveforms, temperature, and fault responses.
- Verify that control algorithms maintain stability and protect hardware.
Step 5: Analysis & Iteration
- Analyze data to detect anomalies or performance degradation.
- Tune control parameters or improve hardware design accordingly.
Mind Map: Practical Example - EV Inverter HIL Testing
Best Practices for Effective HIL Testing
- Accurate Modeling: Ensure real-time models closely mimic real system behavior.
- Robust Interface Design: Use proper signal conditioning and isolation to protect hardware.
- Comprehensive Test Coverage: Include normal, boundary, and fault conditions.
- Data Logging: Capture detailed data for post-test analysis.
- Incremental Testing: Start with simple scenarios before progressing to complex ones.
Additional Example: HIL Testing of a DC-DC Converter Controller
- Simulate input voltage variations and load changes in real-time.
- Connect the actual DC-DC converter controller hardware to the HIL system.
- Test controller response to sudden load steps and input voltage dips.
- Verify stability, transient response, and protection mechanisms.
Summary
Hardware-in-the-Loop testing is an indispensable tool in EV power electronics development. By combining real hardware with simulated environments, engineers can validate designs comprehensively, reduce development time, and enhance system reliability. Incorporating HIL testing early and throughout the design cycle ensures robust and efficient EV power electronics systems.
14.3 Bench Testing and Validation Procedures
Bench testing and validation are critical steps in the development and deployment of power electronics systems for electric vehicles (EVs). These procedures ensure that the designed circuits and systems perform reliably, safely, and efficiently under various operating conditions before integration into the vehicle or charging infrastructure.
Objectives of Bench Testing
- Verify functional correctness of the power electronics module
- Validate electrical performance parameters (voltage, current, efficiency)
- Test thermal behavior and cooling effectiveness
- Confirm protection and fault response mechanisms
- Ensure compliance with relevant standards and specifications
Typical Bench Testing Setup
- Power Supply: Programmable DC or AC source to simulate battery or grid input
- Load: Electronic load or motor emulator to replicate real operating conditions
- Measurement Instruments: Oscilloscope, multimeter, power analyzer, thermal camera
- Control Interface: Microcontroller or DSP development board for control and monitoring
- Safety Equipment: Emergency stop, fuses, isolation transformers
Mind Map: Bench Testing Components and Steps
Step-by-Step Bench Testing Procedure
-
Preparation and Safety Checks
- Verify all equipment is calibrated and functioning.
- Confirm proper grounding and isolation.
- Review test plan and safety protocols.
-
Initial Functional Tests
- Power up the device under no-load conditions.
- Monitor startup behavior and control signals.
- Check for unexpected noise or oscillations on oscilloscope.
-
Load Testing
- Gradually apply load using electronic load or motor emulator.
- Measure input/output voltages and currents.
- Record efficiency at various load points.
-
Thermal Testing
- Use thermal camera or sensors to monitor hotspots.
- Run extended tests to observe temperature rise.
- Verify thermal protection triggers if applicable.
-
Protection and Fault Testing
- Simulate fault conditions such as short circuit or overcurrent.
- Confirm protective shutdown or current limiting.
- Validate fault detection signals and system response.
-
Data Analysis and Reporting
- Compile recorded data.
- Compare results against design specifications.
- Identify areas for improvement.
-
Iterative Testing
- Implement design changes based on findings.
- Repeat testing to verify improvements.
Practical Example: Bench Testing a 12V DC-DC Converter Module
Scenario: Testing a buck converter designed to step down a 48V battery voltage to 12V for auxiliary systems.
-
Setup:
- Input: Programmable DC power supply set to 48V
- Load: Electronic load set to draw 5A constant current
- Instruments: Oscilloscope for switching waveform, power analyzer for efficiency, thermal camera
-
Procedure:
- Power on converter with no load, verify output voltage is stable at 12V.
- Increase load from 0A to 5A in 1A steps, record output voltage, input current, and efficiency.
- Monitor switching waveforms for any abnormal ringing or noise.
- Use thermal camera to check temperature on MOSFET and inductor during full load.
- Simulate short circuit at output and verify converter shuts down or limits current safely.
-
Observations:
- Output voltage remains within ±0.1V of 12V under load.
- Peak efficiency recorded at 94% at 3A load.
- Thermal hotspot on MOSFET reaches 70°C after 30 minutes at full load.
- Protection circuit activates within 50µs during short circuit test.
-
Actions:
- Add additional heat sinking to MOSFET.
- Fine-tune control loop parameters to reduce voltage ripple.
Mind Map: Fault Testing and Protection Validation
Tips and Best Practices
- Always start tests at low power and gradually increase to avoid damage.
- Use isolated measurement tools to prevent ground loops.
- Document all test conditions and results meticulously.
- Incorporate automated test scripts where possible to improve repeatability.
- Validate tests against both nominal and extreme operating conditions.
Bench testing and validation form the backbone of reliable power electronics design in EVs, ensuring that systems meet stringent performance, safety, and durability requirements before field deployment.
14.4 Practical Example: Simulating and Testing a DC-DC Converter Using MATLAB/Simulink
In this section, we will walk through a detailed practical example of simulating and testing a DC-DC converter using MATLAB/Simulink. This example is designed to help electrical engineering students, EV technicians, and power engineers understand the step-by-step process of modeling, simulating, and analyzing a DC-DC converter, which is a critical component in electric vehicle power electronics.
Objective
- To design a buck converter model in Simulink.
- To simulate its operation under different load conditions.
- To analyze key performance parameters such as output voltage, current, and efficiency.
- To implement control strategies and observe system response.
Step 1: Understanding the Buck Converter Topology
A buck converter steps down voltage from a higher input voltage to a lower output voltage efficiently using switching elements.
Mind Map: Buck Converter Components
Step 2: Setting Up the Simulink Model
- Open MATLAB and launch Simulink.
- Create a new model.
- Add the following blocks:
- DC Voltage Source (representing battery or input supply)
- MOSFET or Ideal Switch block
- Diode block
- Inductor
- Capacitor
- Resistor (load)
- PWM Generator or Pulse Generator
- Voltage and Current Measurement blocks
- Scope for visualization
Mind Map: Simulink Model Components
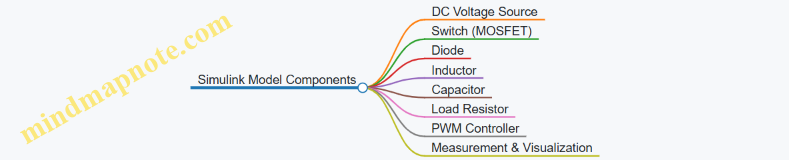
Step 3: Parameter Selection
| Component | Typical Value | Explanation |
|---|---|---|
| Input Voltage \(V_in\) | 48 V | Common EV battery pack voltage |
| Switching Frequency (f_sw) | 20 kHz | Balances efficiency and component size |
| Inductor (L) | 100 µH | Smooths current ripple |
| Capacitor (C) | 470 µF | Filters output voltage ripple |
| Load Resistance (R) | 10 Ω | Represents the load demand |
Step 4: Implementing the PWM Control
- Use a PWM generator block to create a pulse-width modulated signal controlling the MOSFET.
- Adjust the duty cycle to regulate output voltage.
Mind Map: PWM Control Loop
Step 5: Running the Simulation
- Set simulation time (e.g., 0.1 seconds).
- Run the simulation.
- Observe the output voltage and current waveforms on the Scope.
Step 6: Analyzing Results
- Verify that output voltage is approximately the expected value: \( V_{out} = D \times V_{in} \), where D is the duty cycle.
- Check current ripple and voltage ripple.
- Identify any switching noise or instability.
Step 7: Testing Under Different Conditions
- Change load resistance to simulate different power demands.
- Vary input voltage to simulate battery voltage changes.
- Adjust duty cycle dynamically to observe control response.
Mind Map: Test Scenarios
Step 8: Enhancing the Model with Closed-Loop Control
- Add a feedback control system using a PID controller block.
- Measure output voltage and compare with reference.
- Adjust duty cycle automatically to maintain stable output.
Mind Map: Closed-Loop Control System
Example: MATLAB/Simulink Model Snippet
% Define parameters
Vin = 48; % Input voltage in Volts
L = 100e-6; % Inductance in Henry
C = 470e-6; % Capacitance in Farads
R = 10; % Load resistance in Ohms
f_sw = 20e3; % Switching frequency in Hz
D = 0.5; % Initial duty cycle
% Simulation time
simTime = 0.1; % seconds
% Run Simulink model (assumed saved as 'buck_converter_model')
sim('buck_converter_model', simTime);
% Plot output voltage
figure;
plot(simout.time, simout.signals.values);
title('Output Voltage of Buck Converter');
xlabel('Time (s)');
ylabel('Voltage (V)');
Best Practices
- Component Ratings: Always select components with voltage and current ratings above maximum expected values.
- Switching Frequency: Choose a frequency balancing efficiency and size.
- Thermal Considerations: Include thermal models or estimate losses to ensure reliability.
- Simulation Validation: Cross-check simulation results with analytical calculations.
- Incremental Testing: Start with open-loop simulation before adding control loops.
Summary
This practical example demonstrated how to simulate and test a DC-DC buck converter using MATLAB/Simulink. By following the steps and mind maps, you can build a robust model, analyze its performance, and implement control strategies essential for EV power electronics applications.
For further learning, explore:
- Boost and buck-boost converter simulations.
- Modeling non-idealities like switching losses and parasitic elements.
- Hardware-in-the-loop (HIL) testing integration.
End of Section 14.4
15. Summary and Best Practices Checklist
15.1 Recap of Key Power Electronics Concepts for EVs
Electric vehicles (EVs) rely heavily on power electronics to efficiently convert, control, and manage electrical energy between the battery, motor, and charging infrastructure. This section revisits the fundamental concepts covered throughout the blog, reinforced with mind maps and practical examples to solidify understanding.
Mind Map: Core Components of EV Power Electronics
Mind Map: Power Conversion Flow in an EV
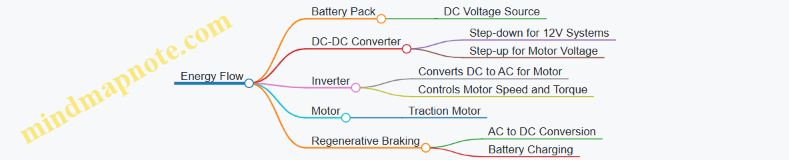
Key Concepts Recap with Examples
Semiconductor Devices
- Concept: MOSFETs and IGBTs are the backbone of power switching in EVs.
- Example: Using a MOSFET-based inverter stage for efficient motor control reduces switching losses and improves thermal performance.
DC-DC Converters
- Concept: Buck, boost, and buck-boost converters regulate voltage levels between battery and auxiliary systems.
- Example: Designing a 12V buck converter from a 400V battery pack to power vehicle electronics ensures stable low-voltage supply.
Inverter Control
- Concept: PWM techniques, such as Space Vector PWM, enable precise control of motor speed and torque.
- Example: Implementing Space Vector PWM in a three-phase inverter improves motor efficiency and reduces harmonic distortion.
Battery Management Integration
- Concept: Power electronics enable cell balancing and safe charging.
- Example: A battery balancer using DC-DC converters maintains uniform cell voltages, extending battery life.
Charging Infrastructure
- Concept: Onboard chargers convert AC grid power to DC battery charging current with power factor correction.
- Example: Designing a single-phase onboard charger with active PFC improves grid compatibility and reduces losses.
Thermal Management
- Concept: Effective heat dissipation is critical for reliability.
- Example: Thermal simulation of an inverter module guides the design of liquid cooling channels to maintain safe operating temperatures.
EMI Mitigation
- Concept: EMI filters and proper PCB layout reduce noise and ensure EMC compliance.
- Example: Designing EMI filters for a DC-DC converter minimizes conducted and radiated emissions.
Control Strategies
- Concept: Closed-loop control using PID or digital controllers ensures stable voltage and current regulation.
- Example: Implementing a PID controller for a DC-DC converter maintains output voltage under varying load conditions.
Reliability and Fault Tolerance
- Concept: Overcurrent protection and fault detection enhance system safety.
- Example: Overcurrent sensors integrated into an inverter trigger shutdown to prevent device damage.
Emerging Technologies
- Concept: Wide bandgap semiconductors like SiC and GaN enable higher efficiency and power density.
- Example: A SiC-based high-frequency DC-DC converter achieves reduced size and improved efficiency compared to silicon counterparts.
Summary Table: Concept vs. Practical Example
| Concept | Practical Example |
|---|---|
| Semiconductor Devices | MOSFET inverter stage design |
| DC-DC Converters | 12V buck converter from 400V battery |
| Inverter Control | Space Vector PWM for three-phase motor |
| Battery Management | DC-DC based battery balancer |
| Onboard Charging | Single-phase charger with PFC |
| Thermal Management | Liquid cooling design via thermal simulation |
| EMI Mitigation | EMI filter design for DC-DC converter |
| Control Strategies | PID controller for voltage regulation |
| Reliability | Overcurrent protection in inverter |
| Emerging Technologies | SiC-based high-frequency DC-DC converter |
This recap consolidates the essential power electronics concepts for EVs, linking theory with practical design examples. Mastery of these fundamentals equips engineers and technicians to innovate and optimize EV power systems effectively.
15.2 Comprehensive Best Practices for Design and Implementation
Designing and implementing power electronics for electric vehicles (EVs) and charging infrastructure requires a systematic approach to ensure efficiency, reliability, safety, and cost-effectiveness. Below is a detailed guide of best practices, supported by mind maps and practical examples to help you internalize and apply these principles effectively.
Component Selection and Specification
- Choose semiconductor devices (MOSFETs, IGBTs, SiC, GaN) based on voltage, current, switching frequency, and thermal characteristics.
- Prioritize devices with low conduction and switching losses to improve efficiency.
- Ensure components meet automotive-grade standards for reliability.
Example: Selecting a SiC MOSFET for a high-frequency DC-DC converter to reduce switching losses and improve thermal performance.
Thermal Management
- Design adequate heat sinks, consider forced air or liquid cooling depending on power density.
- Use thermal interface materials to improve heat transfer.
- Simulate thermal profiles early in the design phase.
Example: Using a liquid cooling jacket for an inverter module in a high-power EV drivetrain to maintain junction temperatures below 125°C.
Electromagnetic Interference (EMI) Mitigation
- Implement proper PCB layout techniques: short loops, ground planes, and component placement.
- Use EMI filters and shielding where necessary.
- Follow EMC standards (e.g., CISPR 25 for automotive).
Example: Adding LC filters at the input and output of a DC-DC converter to reduce conducted EMI and pass CISPR 25 limits.
Control Strategy and Implementation
- Use closed-loop control with appropriate sensors (current, voltage, temperature).
- Implement robust algorithms like PID, Space Vector PWM for motor control.
- Utilize digital controllers (MCUs, DSPs) with real-time capabilities.
Example: Implementing a PID controller on a DSP to regulate output voltage of a buck converter under varying load conditions.
Safety and Protection
- Incorporate overcurrent, overvoltage, and thermal shutdown protections.
- Design for fault detection and graceful degradation.
- Follow automotive safety standards (ISO 26262).
Example: Adding a hardware overcurrent detection circuit that triggers a shutdown if the inverter current exceeds safe limits.
Efficiency Optimization
- Minimize conduction and switching losses by selecting appropriate devices and switching frequencies.
- Optimize gate drive circuits to reduce switching transitions.
- Use synchronous rectification where applicable.
Example: Replacing diode rectification with synchronous MOSFET rectification in a DC-DC converter to improve efficiency by 3-5%.
Mechanical and Environmental Considerations
- Design enclosures for vibration resistance and ingress protection (IP ratings).
- Consider thermal expansion and mechanical stresses.
- Use automotive-grade connectors and cables.
Example: Designing an IP67-rated enclosure for an onboard charger to protect against dust and water ingress.
Testing and Validation
- Perform hardware-in-the-loop (HIL) testing to validate control algorithms.
- Conduct thermal cycling and stress tests.
- Validate EMI/EMC compliance early.
Example: Using MATLAB/Simulink HIL setup to test inverter control firmware before hardware deployment.
Summary Table of Best Practices
| Aspect | Best Practice Summary | Example Application |
|---|---|---|
| Component Selection | Choose devices based on ratings and automotive standards | SiC MOSFET for high-frequency DC-DC converter |
| Thermal Management | Use appropriate cooling and simulate early | Liquid cooling for inverter module |
| EMI Mitigation | Optimize PCB layout, filters, and shielding | LC filters for DC-DC converter input/output |
| Control Strategy | Use closed-loop control with robust algorithms | PID controller on DSP for voltage regulation |
| Safety & Protection | Implement overcurrent, overvoltage, thermal protections | Hardware overcurrent shutdown circuit |
| Efficiency Optimization | Minimize losses, optimize gate drive, use synchronous rectification | Synchronous MOSFET rectification in DC-DC converter |
| Mechanical Design | Design for vibration, IP rating, and mechanical stress | IP67 enclosure for onboard charger |
| Testing & Validation | HIL testing, thermal cycling, EMI compliance | MATLAB/Simulink HIL testing of inverter control |
By following these comprehensive best practices, engineers and technicians can design and implement power electronics systems for EVs and charging infrastructure that are efficient, reliable, safe, and compliant with industry standards.
15.3 Common Pitfalls and How to Avoid Them
In the design and implementation of power electronics for electric vehicles (EVs) and charging infrastructure, several common pitfalls can significantly impact performance, reliability, and safety. Understanding these pitfalls and adopting strategies to avoid them is crucial for engineers and technicians.
Pitfall 1: Inadequate Thermal Management
Description: Overlooking heat dissipation leads to device overheating, reduced lifespan, and potential failure.
How to Avoid:
- Use proper heat sinks, thermal interface materials, and cooling methods (air, liquid).
- Perform thermal simulations early in the design.
- Monitor temperature during testing.
Example: A MOSFET in an inverter module without sufficient cooling caused thermal runaway during high load. Adding a liquid cooling plate and thermal pads stabilized the temperature.
Pitfall 2: Poor EMI/EMC Design
Description: Neglecting electromagnetic interference (EMI) leads to noise issues, malfunctioning sensors, and regulatory non-compliance.
How to Avoid:
- Implement proper PCB layout with short loop areas.
- Use EMI filters and shielding.
- Follow EMC standards during design.
Example: A DC-DC converter caused noise on the vehicle CAN bus. Adding a common-mode choke and improving ground layout resolved communication errors.
Pitfall 3: Incorrect Semiconductor Device Selection
Description: Choosing devices without considering voltage, current, switching frequency, or thermal limits can cause inefficiency or failure.
How to Avoid:
- Analyze operating conditions thoroughly.
- Select devices with appropriate voltage and current ratings.
- Consider switching speed and losses.
Example: Using an IGBT with a low switching frequency rating in a high-frequency inverter led to excessive switching losses. Replacing it with a SiC MOSFET improved efficiency.
Pitfall 4: Insufficient Protection and Fault Handling
Description: Lack of overcurrent, overvoltage, and thermal protection can cause catastrophic damage.
How to Avoid:
- Integrate protection circuits like fuses, current sensors, and watchdog timers.
- Implement fault detection and safe shutdown routines.
Example: An inverter without overcurrent protection suffered a short-circuit failure. Adding fast-acting fuses and current sensing prevented future damage.
Pitfall 5: Neglecting Control Loop Stability
Description: Poorly tuned control loops cause oscillations, instability, and degraded performance.
How to Avoid:
- Perform control loop analysis and tuning (e.g., PID parameters).
- Use simulation tools to verify stability.
Example: A DC-DC converter exhibited output voltage oscillations due to aggressive PID settings. Re-tuning the controller stabilized the output.
Pitfall 6: Overlooking EMI and Thermal Effects in High-Frequency Designs
Description: High switching frequencies increase EMI and thermal stress, which if unaddressed, degrade system reliability.
How to Avoid:
- Balance switching frequency with thermal and EMI constraints.
- Use wide bandgap devices (SiC, GaN) to reduce losses.
- Design advanced cooling and EMI mitigation.
Example: A 500 kHz DC-DC converter initially had EMI issues and overheating. Switching to SiC MOSFETs and adding EMI filters resolved the problems.
Summary Table of Common Pitfalls and Avoidance Strategies
| Pitfall | Cause(s) | Effect(s) | Avoidance Strategy | Example Summary |
|---|---|---|---|---|
| Thermal Management | Insufficient cooling | Device failure, safety hazards | Thermal simulation, cooling design | Added liquid cooling to MOSFET inverter |
| EMI/EMC Design | Poor layout, no filtering | Noise, communication errors | PCB layout, EMI filters, grounding | Added common-mode choke to DC-DC converter |
| Semiconductor Device Selection | Misunderstood specs | High losses, failure | Proper rating selection, thermal derating | Replaced IGBT with SiC MOSFET |
| Protection and Fault Handling | Lack of sensors and fuses | Damage, downtime | Overcurrent sensors, fuses, fault handling | Added fast-acting fuses to inverter |
| Control Loop Stability | Poor PID tuning | Oscillations, instability | Control tuning, simulation | Re-tuned PID controller for DC-DC converter |
| High-Frequency Design | Excessive frequency, poor EMI | EMI noise, thermal failure | Frequency balance, wide bandgap devices | Switched to SiC MOSFETs and EMI filters |
By proactively addressing these common pitfalls with the outlined best practices and examples, engineers can significantly improve the robustness, efficiency, and safety of power electronics systems in electric vehicles and charging infrastructure.
15.4 Practical Example: Step-by-Step Design Checklist for an EV Power Electronics Module
Designing a power electronics module for electric vehicles (EVs) requires a systematic approach to ensure performance, reliability, safety, and cost-effectiveness. This section provides a detailed step-by-step checklist accompanied by mind maps and practical examples to guide you through the design process.
Step 1: Define System Requirements
- Voltage and Current Ratings: Determine the operating voltage and current ranges based on the EV battery and load.
- Power Level: Define the power rating (e.g., 10 kW inverter, 3 kW DC-DC converter).
- Efficiency Targets: Set efficiency goals to optimize energy usage.
- Thermal Constraints: Understand allowable temperature ranges.
- Size and Weight Limits: Consider packaging constraints.
- Environmental Conditions: Operating temperature, humidity, vibration.
Example: For a 48 V to 12 V DC-DC converter, specify input voltage range 40–60 V, output current up to 20 A, efficiency > 95%, and operating temperature -40°C to 85°C.
Step 2: Select Power Semiconductor Devices
- Choose between MOSFETs, IGBTs, SiC, or GaN devices based on switching frequency, voltage, current, and efficiency.
- Consider device Rds(on), switching losses, and thermal characteristics.
- Verify availability and cost.
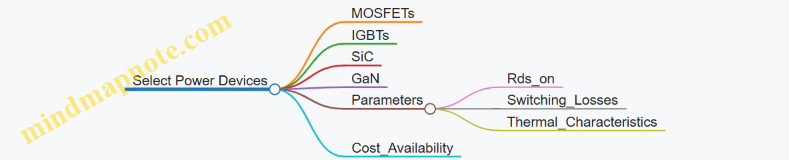
Example: For a high-frequency 12 V DC-DC converter, select low Rds(on) MOSFETs with a voltage rating of 30 V and current rating of 30 A.
Step 3: Choose Converter Topology
- Decide on buck, boost, buck-boost, or isolated topologies based on voltage conversion needs.
- Consider complexity, cost, and efficiency.
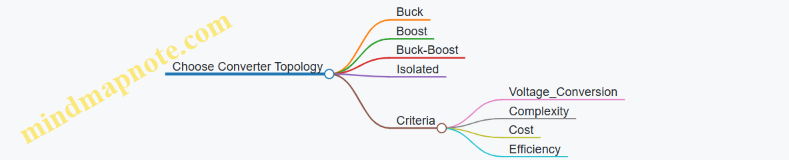
Example: For stepping down 48 V to 12 V, a synchronous buck converter is preferred for high efficiency and simplicity.
Step 4: Design Control Strategy
- Select control method: voltage mode, current mode, or digital control.
- Define PWM scheme and switching frequency.
- Plan feedback loops and protection mechanisms.
Example: Implement current mode control with fixed-frequency PWM at 200 kHz, including overcurrent and thermal shutdown protections.
Step 5: Thermal Management Planning
- Calculate expected losses and heat generation.
- Choose cooling method: passive heat sinks, forced air, or liquid cooling.
- Design thermal interface materials and layout.
Example: For a 3 kW converter with 95% efficiency, expect ~150 W heat dissipation; design aluminum heat sink with forced air cooling.
Step 6: PCB and Layout Design
- Optimize trace widths for current carrying capability.
- Minimize loop areas to reduce EMI.
- Separate high-power and control circuits.
- Implement proper grounding and shielding.
Example: Use 2 oz copper layers for power traces, place input and output capacitors close to devices, and route high-current loops with minimal area.
Step 7: EMI/EMC Considerations
- Add input/output filters.
- Use snubber circuits if necessary.
- Follow layout best practices.
- Test for compliance with automotive standards.
Example: Design LC input filter to reduce conducted EMI and add RC snubber across MOSFETs to damp voltage spikes.
Step 8: Protection and Safety Features
- Overcurrent and short-circuit protection.
- Overvoltage and undervoltage lockout.
- Thermal shutdown.
- Isolation and creepage distances.
Example: Integrate a current sense resistor with comparator for overcurrent detection and shut down the converter if threshold exceeded.
Step 9: Prototype and Testing
- Build prototype PCB.
- Perform functional testing and efficiency measurements.
- Thermal imaging to verify heat dissipation.
- EMI testing.
- Iterate design based on results.
Example: Test the converter under full load, measure efficiency at 96%, identify hotspot on MOSFET, improve heat sink design.
Step 10: Documentation and Finalization
- Prepare detailed schematics and BOM.
- Write test reports.
- Create user and service manuals.
- Plan for manufacturing and quality control.
Example: Document all design decisions, test results, and prepare assembly instructions for manufacturing.
Summary Mind Map: Complete Design Checklist
This step-by-step checklist, combined with the mind maps and examples, provides a practical framework for designing robust and efficient power electronics modules tailored for electric vehicles. Following these guidelines ensures a balanced approach addressing electrical, thermal, mechanical, and regulatory aspects critical to EV power electronics success.