Engineering Autonomous Swarms: Drones, Robots, and Collective Intelligence
1. Introduction to Autonomous Swarms
1.1 Defining Autonomous Swarms: Concepts and Terminology
Autonomous swarms refer to groups of robots or drones that operate collectively without centralized control, exhibiting intelligent, coordinated behavior through local interactions and decentralized decision-making. These systems draw inspiration from natural swarms like ants, bees, and flocks of birds, where simple individual agents follow basic rules to achieve complex group objectives.
Key Concepts and Terminology
- Autonomy: The ability of individual agents to operate without human intervention, making decisions based on local information.
- Swarm: A large collection of relatively simple agents working together to perform tasks beyond individual capability.
- Decentralization: Control is distributed among agents rather than relying on a single central controller.
- Collective Intelligence: Emergent intelligence arising from the interactions of multiple agents.
- Local Interaction: Agents communicate or sense only their immediate neighbors or environment.
- Emergent Behavior: Complex group behaviors that arise from simple individual rules.
- Scalability: The swarm’s ability to maintain performance as the number of agents increases.
- Robustness: The system’s resilience to failures or loss of individual agents.
Mind Map: Core Concepts of Autonomous Swarms
Example 1: Simple Autonomous Drone Swarm for Area Coverage
Imagine a swarm of 20 drones tasked with surveying a large agricultural field. Each drone is equipped with GPS and a camera. Instead of a central controller assigning fixed paths, each drone uses local sensing and communication to avoid collisions and evenly distribute themselves over the field.
- Autonomy: Each drone decides its next move based on neighbors’ positions.
- Decentralization: No single drone controls the entire swarm.
- Emergent Behavior: The drones collectively cover the entire area efficiently.
This approach allows the swarm to adapt if some drones fail or new drones join.
Mind Map: Example 1 Breakdown
Example 2: Ground Robot Swarm Inspired by Ant Colonies
A swarm of small ground robots is designed to collectively find and transport objects to a base station. Each robot follows simple rules inspired by ants:
- Deposit virtual pheromones when finding objects.
- Follow pheromone trails to locate objects.
- Avoid obstacles and other robots.
Through these local interactions, the swarm efficiently locates and retrieves scattered objects without centralized planning.
Mind Map: Example 2 Breakdown
Summary
Understanding the foundational concepts and terminology of autonomous swarms is critical for designing effective multi-agent systems. By leveraging autonomy, decentralization, and local interactions, engineers can create robust, scalable swarms capable of complex tasks through emergent collective intelligence.
1.2 Historical Evolution of Swarm Robotics and Collective Systems
Swarm robotics and collective systems have their roots deeply embedded in both natural observations and advances in robotics and computer science. Understanding this historical evolution provides valuable context for current engineering practices and future innovations.
Origins in Nature: Inspiration from Biological Swarms
The concept of swarm intelligence originates from observing social insects and animals that exhibit complex collective behaviors through simple individual rules. Examples include:
- Ant Colonies: Efficient foraging and path optimization.
- Bee Swarms: Collective decision-making for nest site selection.
- Bird Flocking: Coordinated movement and predator avoidance.
These natural systems inspired early computational models and algorithms that mimic decentralized control and emergent behavior.
Early Computational Models and Algorithms
In the 1980s and 1990s, researchers began formalizing swarm intelligence concepts:
- 1986 - Ant Colony Optimization (ACO): Introduced by Marco Dorigo, this algorithm mimics ants’ pheromone-based pathfinding to solve combinatorial optimization problems.
- 1987 - Boids Model: Craig Reynolds developed the Boids algorithm simulating bird flocking with three simple rules: separation, alignment, and cohesion.
These models laid the foundation for translating biological principles into robotic systems.
Emergence of Swarm Robotics as a Field
The 1990s and early 2000s saw the emergence of swarm robotics as a dedicated research area:
- 1994: The term “swarm robotics” was popularized, emphasizing large groups of simple robots cooperating without centralized control.
- Kilobot Project (2012): Harvard’s Kilobot swarm demonstrated scalable collective behaviors with over 1,000 robots.
Early robotic platforms were often simple, focusing on demonstrating fundamental swarm behaviors like aggregation, dispersion, and collective transport.
Milestones in Hardware and Control Systems
- Modular Robots: Development of self-reconfigurable modular robots enabled physical adaptation of the swarm structure.
- Decentralized Control Algorithms: Advances in consensus algorithms and distributed control enhanced robustness and scalability.
Modern Applications and Integration
Today, swarm robotics integrates AI, advanced sensors, and communication technologies:
- Drone Swarms: Used in agriculture, surveillance, and entertainment (e.g., coordinated drone light shows).
- Search and Rescue: Swarms explore hazardous environments collaboratively.
- Industrial Automation: Multi-robot systems optimize warehouse logistics.
Mind Map: Historical Evolution of Swarm Robotics
Example: Boids Algorithm in Early Swarm Robotics
The Boids algorithm, developed by Craig Reynolds, is a seminal example illustrating how simple local rules can produce complex group behavior. Each “boid” (bird-oid object) follows three rules:
- Separation: Avoid crowding neighbors.
- Alignment: Steer towards average heading of neighbors.
- Cohesion: Move towards average position of neighbors.
This algorithm was implemented in early robotic swarms to achieve flocking behavior without centralized control, demonstrating emergent coordination.
Example: Ant Colony Optimization in Robot Path Planning
Inspired by ants’ pheromone trails, ACO algorithms have been applied to multi-robot path planning. Robots deposit virtual pheromones in a shared map to indicate preferred paths, allowing the swarm to collectively find efficient routes around obstacles.
This method exemplifies how biological principles translate into engineering solutions for autonomous swarm coordination.
Best Practice Embedded
Start with Nature-Inspired Models: When engineering autonomous swarms, begin by studying and implementing simple bio-inspired algorithms like Boids or ACO. These models provide intuitive, easy-to-understand frameworks that can be incrementally expanded and adapted to complex robotic platforms.
By tracing the historical evolution from natural inspiration through computational models to modern robotic applications, engineers gain a comprehensive perspective that informs design choices and innovation in autonomous swarm systems.
1.3 Key Benefits and Challenges in Engineering Swarms
Engineering autonomous swarms—whether drones, ground robots, or mixed systems—presents a unique blend of exciting benefits and complex challenges. Understanding these is crucial for robotics engineers, control engineers, and applied researchers aiming to harness the full potential of collective intelligence.
Benefits of Autonomous Swarms
-
Scalability and Flexibility
- Swarms can easily scale by adding more agents without redesigning the entire system.
- Flexible deployment across various tasks and environments.
-
Robustness and Fault Tolerance
- Failure of individual agents rarely compromises the entire swarm.
- Redundancy ensures continued operation despite hardware/software faults.
-
Parallelism and Efficiency
- Multiple agents working simultaneously can complete tasks faster than a single robot.
- Distributed workload reduces bottlenecks.
-
Cost-Effectiveness
- Using many simple, inexpensive robots can be more economical than a few complex ones.
-
Emergent Collective Intelligence
- Complex behaviors emerge from simple local interactions, enabling sophisticated problem-solving.
-
Adaptability to Dynamic Environments
- Swarms can reconfigure and adapt to changes or unexpected obstacles in real time.
Mind Map: Benefits of Autonomous Swarms
Example: Agricultural Drone Swarms
In precision agriculture, a swarm of low-cost drones can collectively monitor large crop fields. If one drone fails or runs out of battery, others continue the mission, ensuring robust and scalable coverage without expensive single-point failures.
Challenges in Engineering Autonomous Swarms
-
Communication Constraints
- Limited bandwidth and range can restrict information sharing.
- Interference and signal loss in complex environments.
-
Coordination Complexity
- Designing algorithms that ensure coherent group behavior from local interactions.
- Avoiding conflicts such as collisions or task duplication.
-
Localization and Sensing Limitations
- Accurate positioning is difficult, especially indoors or GPS-denied areas.
- Sensor noise and failures impact decision-making.
-
Energy Management
- Limited battery life requires efficient power usage and recharging strategies.
-
Scalability of Control Algorithms
- Algorithms must perform efficiently as swarm size grows.
-
Safety and Ethical Concerns
- Ensuring safe operation around humans and sensitive environments.
- Addressing privacy and regulatory compliance.
-
Hardware Heterogeneity
- Managing swarms composed of different robot types with varying capabilities.
Mind Map: Challenges in Engineering Autonomous Swarms
Example: Search and Rescue Robot Swarms
In disaster zones, robot swarms face communication blackouts and GPS-denied environments. Engineers must develop robust coordination and localization methods that work under these constraints. For instance, robots may rely on local sensing and ad-hoc networking to maintain group coherence and avoid collisions.
Integrating Best Practices to Address Challenges
- Decentralized Control: Avoid single points of failure by distributing decision-making.
- Adaptive Communication Protocols: Use mesh networks that dynamically adjust to signal quality.
- Robust Localization Techniques: Combine onboard sensors with cooperative localization among swarm members.
- Energy-Aware Task Allocation: Assign tasks based on individual robot energy levels to maximize mission duration.
Example: Decentralized Flocking with Collision Avoidance
Implementing a decentralized flocking algorithm where each robot uses local sensing to maintain formation and avoid collisions exemplifies tackling coordination complexity and communication constraints simultaneously.
Summary
Engineering autonomous swarms offers transformative benefits such as scalability, robustness, and emergent intelligence, but also demands overcoming significant challenges in communication, coordination, sensing, and safety. By understanding these trade-offs and applying best practices, engineers can design effective, resilient swarms tailored to real-world applications.
1.4 Overview of Applications: From Drones to Ground Robots
Autonomous swarms, comprising drones and ground robots, have rapidly expanded their applications across numerous industries. Their ability to collaborate, adapt, and operate collectively enables solutions that single robots cannot achieve alone. This section explores key application domains, illustrating how swarm robotics transforms real-world challenges with practical examples.
Mind Map: Applications of Autonomous Swarms
Aerial Drone Swarms
Agriculture: Drones equipped with multispectral cameras fly in coordinated patterns to monitor crop health, detect pest infestations, and assess irrigation needs. For example, a swarm of drones can cover large fields rapidly, providing real-time data to farmers for precision spraying, reducing chemical use and increasing yield.
Example: The startup AgriFly uses drone swarms to scan vineyards, identifying stressed plants and enabling targeted treatment.
Infrastructure Inspection: Swarm drones inspect power lines, bridges, and wind turbines by dividing the inspection area among themselves. This reduces inspection time and increases safety by minimizing human exposure to hazardous environments.
Example: SkyInspect deploys drone swarms to inspect high-voltage power lines, automatically detecting faults and reporting anomalies.
Disaster Response: In post-disaster scenarios, drone swarms rapidly map affected areas, locate survivors, and assess structural damage. Their collective intelligence allows them to cover complex terrains efficiently.
Example: After an earthquake, a swarm of drones from RescueBots mapped collapsed buildings and relayed survivor locations to rescue teams.
Delivery Services: Swarm drones can coordinate to deliver packages in urban environments, optimizing routes and avoiding collisions.
Example: FlyFleet demonstrated a swarm-based delivery system where multiple drones simultaneously deliver medical supplies to remote clinics.
Ground Robot Swarms
Warehouse Automation: Ground robot swarms manage inventory, transport goods, and optimize warehouse workflows. Their decentralized coordination allows flexible task allocation and scalability.
Example: Amazon Robotics uses hundreds of ground robots in warehouses to move shelves and fulfill orders efficiently.
Environmental Monitoring: Robotic swarms collect soil samples, monitor pollution, and track wildlife movements over large areas, providing detailed environmental data.
Example: The EcoBots project deploys ground robot swarms to monitor forest health and detect early signs of wildfires.
Military and Security: Swarms perform surveillance, reconnaissance, and perimeter security, offering persistent monitoring with redundancy.
Example: The U.S. military tested ground robot swarms for coordinated patrols in urban environments, enhancing situational awareness.
Construction: Robotic swarms assist in site mapping, material transport, and even collaborative assembly tasks, improving efficiency and safety.
Example: BuildBots developed a swarm of ground robots that autonomously transport construction materials and perform site inspections.
Hybrid Air-Ground Swarm Systems
Combining aerial and ground robots leverages the strengths of both platforms. For instance, drones provide aerial mapping and surveillance, while ground robots perform detailed inspections or material handling.
Example: In disaster relief, a hybrid swarm from DisasterAid uses drones to locate survivors and ground robots to deliver supplies and clear debris.
Best Practice: Selecting the Right Platform for Your Application
- Assess the Environment: Use drones for large-scale, hard-to-reach, or hazardous areas; ground robots excel in confined or cluttered spaces.
- Define the Task Complexity: Simple monitoring may require fewer robots; complex tasks benefit from heterogeneous swarms.
- Consider Communication and Control Needs: Air-ground coordination demands robust communication protocols.
By understanding these diverse applications and their practical implementations, engineers and researchers can better design autonomous swarms tailored to specific mission requirements, maximizing efficiency and impact.
1.5 Best Practice: Starting Small – Prototyping with Simple Robot Swarms
When engineering autonomous swarms, one of the most effective best practices is to start small. Prototyping with simple robot swarms allows engineers and researchers to validate core concepts, identify challenges early, and iterate rapidly before scaling up to more complex systems. This section explores practical approaches, examples, and mind maps to guide you through the process of starting small with swarm prototypes.
Why Start Small?
- Manage Complexity: Smaller swarms reduce the number of interacting variables.
- Cost Efficiency: Fewer robots mean lower initial investment.
- Rapid Iteration: Easier debugging and faster testing cycles.
- Learning Foundation: Understand fundamental swarm behaviors before scaling.
Key Components of a Simple Robot Swarm Prototype
Mind Map: Components of a Simple Robot Swarm Prototype
Example 1: Kilobot Aggregation Prototype
Scenario: Kilobots are small, low-cost robots designed for swarm experiments. A common beginner project is to program them to aggregate into a cluster using simple local rules.
Implementation Steps:
- Hardware: Use 10-20 Kilobots equipped with IR communication.
- Behavior Rule: Each robot moves randomly but stops moving when it detects a neighbor within a threshold distance.
- Outcome: Over time, the robots cluster together, demonstrating emergent aggregation.
Lessons Learned:
- Simple local sensing and communication suffice to produce complex group behavior.
- Noise and hardware variability affect aggregation speed and shape.
Example 2: Small Drone Flocking with Crazyflie
Scenario: Using 3-5 Crazyflie nano drones to prototype flocking behavior inspired by the Boids algorithm.
Implementation Steps:
- Hardware: Crazyflie drones with onboard IMU and radio communication.
- Algorithm: Implement three simple rules — separation, alignment, cohesion.
- Testing: Conduct flight tests in a small indoor arena with motion capture for localization.
Lessons Learned:
- Real-time communication delays impact flock stability.
- Safety measures (e.g., emergency stop) are critical even in small swarms.
Practical Tips for Starting Small
Mind Map: Practical Tips for Small Swarm Prototyping
Example 3: Ground Robot Line Following Swarm
Scenario: A group of 5 differential-drive robots programmed to follow a line and maintain formation.
Implementation Steps:
- Hardware: Small wheeled robots with line sensors.
- Behavior: Each robot follows the line and adjusts speed to keep a fixed distance from the robot ahead.
- Outcome: Robots maintain a convoy formation, demonstrating coordinated movement.
Lessons Learned:
- Simple sensor fusion improves reliability.
- Formation control can be achieved with minimal communication.
Summary
Starting small with simple robot swarms is a foundational best practice that enables engineers to build intuition, test algorithms, and refine hardware setups before tackling larger, more complex systems. By focusing on minimal viable swarms, you can effectively prototype, learn, and iterate with manageable risk and cost.
Additional Resources
- Kilobot Project Website
- Crazyflie Nano Drones
- Boids Algorithm Explanation
- Swarm Robotics Tutorials on GitHub
Starting your swarm robotics journey with small, manageable prototypes is the key to mastering the art and science of collective intelligence engineering.
2. Fundamentals of Swarm Intelligence and Collective Behavior
2.1 Principles of Swarm Intelligence: Inspiration from Nature
Swarm intelligence is a fascinating field that draws inspiration from the collective behaviors observed in nature. It studies how simple agents following simple rules can produce complex, intelligent group behavior without centralized control. This principle underpins the design of autonomous swarms in robotics, enabling systems to be scalable, robust, and adaptive.
What is Swarm Intelligence?
Swarm intelligence refers to the collective behavior of decentralized, self-organized systems, natural or artificial. The agents interact locally with one another and with their environment, leading to the emergence of global patterns or solutions.
Key Characteristics of Natural Swarms
- Decentralization: No single agent directs the group; control is distributed.
- Self-organization: Order arises spontaneously from local interactions.
- Flexibility: The swarm adapts to changes in the environment.
- Robustness: The system tolerates failure of individual agents.
- Scalability: Performance remains effective as the swarm size changes.
Mind Map: Core Principles of Swarm Intelligence
Natural Inspirations for Swarm Intelligence
Many natural systems demonstrate swarm intelligence, providing blueprints for engineering autonomous swarms:
Ant Colonies
- Behavior: Ants use pheromone trails to find shortest paths to food sources.
- Principle: Indirect communication (stigmergy) through environment modification.
- Example: Ant Colony Optimization (ACO) algorithms for routing and path planning.
Bird Flocking
- Behavior: Birds fly in coordinated flocks, avoiding collisions and maintaining cohesion.
- Principle: Simple local rules: alignment, separation, and cohesion.
- Example: Boids algorithm used in swarm robotics for coordinated movement.
Fish Schooling
- Behavior: Fish swim in synchronized groups to evade predators and improve foraging.
- Principle: Dynamic spatial organization and rapid response to neighbors.
- Example: Adaptive formation control in underwater robot swarms.
Bee Swarming
- Behavior: Bees collectively decide on new hive locations through waggle dances.
- Principle: Distributed decision-making and consensus building.
- Example: Consensus algorithms for multi-robot task allocation.
Mind Map: Natural Inspirations and Their Principles
Example: Boids Algorithm for Flocking Behavior
The Boids algorithm, developed by Craig Reynolds, simulates bird flocking using three simple rules applied by each agent:
- Separation: Avoid crowding neighbors.
- Alignment: Steer towards average heading of neighbors.
- Cohesion: Move towards average position of neighbors.
These simple local rules produce realistic flocking behavior without centralized control.
Practical Example:
- In a drone swarm, each drone uses onboard sensors to detect nearby drones and adjusts its velocity according to the Boids rules, resulting in smooth, collision-free group flight.
Example: Ant Colony Optimization (ACO) in Robotics
ACO algorithms mimic how ants find shortest paths by depositing and following pheromone trails.
Practical Example:
- A swarm of ground robots searching for optimal routes in a warehouse can use ACO-inspired algorithms to dynamically update path preferences based on successful navigation, improving efficiency over time.
Summary
Swarm intelligence principles derived from nature provide powerful, scalable, and robust strategies for engineering autonomous swarms. By understanding and applying decentralization, self-organization, and simple local rules inspired by ants, birds, fish, and bees, robotics engineers can design systems capable of complex collective behaviors.
In the next section, we will explore how these principles lead to emergent behaviors and how to harness them effectively in swarm robotics.
2.2 Emergent Behavior: How Simple Rules Create Complex Outcomes
Emergent behavior is a fundamental concept in swarm robotics and collective intelligence, where complex global patterns and functionalities arise from the interaction of many simple agents following straightforward local rules. This phenomenon allows autonomous swarms to perform sophisticated tasks without centralized control.
Understanding Emergent Behavior
At its core, emergent behavior occurs when individual robots or drones operate based on simple, local rules, yet their collective interactions produce unexpected, often complex, global outcomes. This principle is inspired by natural systems such as ant colonies, bird flocks, and fish schools.
Key Characteristics of Emergent Behavior
- Local Interactions: Each agent makes decisions based on local information and neighbor states.
- Decentralization: No single agent controls the swarm; coordination arises naturally.
- Scalability: The system can handle varying numbers of agents without redesign.
- Robustness: The swarm can tolerate failures of individual agents without collapsing.
Mind Map: Emergent Behavior in Swarm Robotics
Simple Rules Leading to Complex Outcomes: Classic Examples
Flocking Behavior (Boids Model)
Craig Reynolds’ Boids algorithm models bird flocking with three simple rules:
- Separation: Avoid crowding neighbors.
- Alignment: Steer towards the average heading of neighbors.
- Cohesion: Move towards the average position of neighbors.
Despite the simplicity, these rules produce realistic flocking patterns.
Example:
Imagine a swarm of drones tasked with aerial surveillance. Each drone follows the Boids rules to maintain formation, avoid collisions, and adapt to obstacles, resulting in a fluid, coordinated flight pattern without centralized commands.
Mind Map: Boids Algorithm Rules
Foraging Behavior Inspired by Ant Colonies
Ants find shortest paths to food sources by laying and following pheromone trails. Robots can mimic this by:
- Leaving digital ‘pheromones’ in the environment.
- Following stronger pheromone trails to resources.
- Updating trails based on success.
Example:
A swarm of ground robots searches a disaster site for survivors. Each robot deposits virtual markers when it finds a target, guiding others efficiently to critical locations.
Mind Map: Ant-Inspired Foraging
Best Practices for Engineering Emergent Behavior
- Design Simple, Local Rules: Keep agent behaviors straightforward to ensure scalability and robustness.
- Test in Simulation: Use simulations to observe emergent patterns before real-world deployment.
- Iterate and Refine: Small changes in rules can drastically affect outcomes; iterative tuning is essential.
- Incorporate Noise and Uncertainty: Real-world environments are unpredictable; design rules that tolerate variability.
Practical Example: Implementing Aggregation in Robot Swarms
Scenario: Robots need to gather into clusters to perform a collective task.
Simple Rules:
- Move randomly when isolated.
- When detecting other robots nearby, move towards them.
- Maintain a minimum distance to avoid collisions.
Outcome: Robots spontaneously form clusters without central coordination.
Visualization Mind Map:
Summary
Emergent behavior demonstrates the power of simple rules in creating complex, adaptive, and robust swarm systems. By carefully designing local interactions, engineers can harness collective intelligence to solve challenging problems in autonomous robotics.
For a deeper dive, explore the next section on communication models that enable these local interactions.
2.3 Communication Models in Swarms: Local vs Global
Effective communication is fundamental to the coordination and collective intelligence of autonomous swarms. Understanding the communication models—local and global—is crucial for designing robust swarm systems. This section explores these models, their characteristics, advantages, challenges, and practical examples.
Overview of Communication Models
| Aspect | Local Communication | Global Communication |
|---|---|---|
| Definition | Communication limited to immediate neighbors or within a small range | Communication accessible to all or most swarm members across the entire group |
| Scale | Short-range, often peer-to-peer | Long-range or broadcast |
| Complexity | Lower communication overhead | Higher communication overhead |
| Robustness | High fault tolerance due to decentralized nature | Vulnerable to single points of failure |
| Examples | Ant colony pheromone trails, robot proximity sensors | Centralized command, cloud-based coordination |
Local Communication
Local communication involves exchanging information only with nearby agents. This model mimics natural swarms like bird flocks or fish schools where each member reacts to neighbors.
Characteristics:
- Decentralized: No single point of control.
- Scalable: Works well as swarm size increases.
- Robust: Failure of some agents doesn’t collapse the system.
Common Methods:
- Short-range wireless signals (e.g., Bluetooth, Zigbee)
- Infrared communication
- Visual signals (LEDs, gestures)
- Chemical signals (in bio-hybrid systems)
Mind Map: Local Communication Model
Example: Boids Algorithm
The Boids model simulates flocking behavior where each agent adjusts its velocity based on the positions and velocities of nearby neighbors only. This local communication leads to emergent flocking without centralized control.
Global Communication
Global communication allows agents to share information across the entire swarm, either directly or via a central node.
Characteristics:
- Centralized or broadcast-based: Can include a leader or base station.
- Comprehensive awareness: Agents can access global state or mission updates.
- Higher communication overhead: Requires more bandwidth and energy.
Common Methods:
- Wi-Fi or cellular networks
- Mesh networks with multi-hop routing
- Cloud or edge computing integration
Mind Map: Global Communication Model
Example: Centralized Drone Fleet
A fleet of delivery drones communicates with a central control server that assigns tasks and monitors status. This global communication enables optimized routing and collision avoidance but depends on reliable connectivity.
Hybrid Communication Models
Many practical swarm systems blend local and global communication to balance scalability and coordination.
- Local communication for immediate neighbor interactions and collision avoidance.
- Global communication for mission updates, reconfiguration, or emergency commands.
Example: Search and Rescue Robot Swarm
Robots share local sensor data with neighbors to navigate terrain but periodically upload summarized data to a central command for strategic decisions.
Summary Table
| Model | Use Case Example | Pros | Cons |
|---|---|---|---|
| Local | Boids flocking, Kilobots | Scalable, robust, low energy | Limited global awareness |
| Global | Centralized drone delivery | Full coordination, mission control | High overhead, less robust |
| Hybrid | Search & rescue, environmental monitoring | Balanced scalability and control | Complexity in design |
Best Practice: Choosing the Right Communication Model
- For large-scale, dynamic swarms, prioritize local communication to maintain robustness and scalability.
- For mission-critical tasks requiring centralized oversight, incorporate global communication with fail-safes.
- Use hybrid models to leverage strengths of both, adapting communication based on task phase.
Additional Example: Kilobot Swarm Robots
Kilobots use local infrared communication to coordinate collective behaviors such as shape formation. Their simple local communication enables thousands of units to operate simultaneously without centralized control.
Visual Summary Mind Map: Communication Models in Swarms
Understanding the trade-offs between local and global communication models enables engineers to design effective swarm systems tailored to their application requirements, ensuring robust, scalable, and intelligent collective behaviors.
2.4 Best Practice: Implementing Flocking Behavior Using Boids Algorithm with Example
Introduction
Flocking behavior is a foundational example of swarm intelligence, demonstrating how simple local rules can lead to complex, coordinated group movement. The Boids algorithm, introduced by Craig Reynolds in 1986, models this behavior using three core rules: Separation, Alignment, and Cohesion. Implementing this algorithm in autonomous swarms such as drones or ground robots enables robust, scalable, and decentralized coordination.
Core Principles of Boids Algorithm
Mind Map: Boids Algorithm Core Rules
Detailed Explanation of Each Rule
- Separation: Prevents collisions by steering each agent away from neighbors that are too close.
- Alignment: Encourages each agent to match the average direction and speed of nearby agents, promoting synchronized movement.
- Cohesion: Drives agents to move towards the center of mass of their local neighborhood, keeping the swarm together.
Implementing Boids Algorithm: Step-by-Step
Step 1: Define Parameters
- Neighborhood radius (how far each agent senses others)
- Maximum speed and steering force
- Weights for each rule (Separation, Alignment, Cohesion)
Step 2: Perception
Each agent identifies neighbors within its perception radius.
Step 3: Calculate Steering Vectors
For each rule, compute a steering vector:
- Separation vector: sum of vectors pointing away from close neighbors
- Alignment vector: average velocity of neighbors
- Cohesion vector: vector towards average position of neighbors
Step 4: Combine Steering Vectors
Weighted sum of the three steering vectors determines the agent’s acceleration.
Step 5: Update Velocity and Position
Apply acceleration to velocity (limit to max speed), then update position.
Example: Simple Python Implementation Snippet
import numpy as np
class Boid:
def __init__(self, position, velocity):
self.position = np.array(position, dtype='float64')
self.velocity = np.array(velocity, dtype='float64')
self.max_speed = 4.0
self.max_force = 0.05
def update(self):
self.position += self.velocity
speed = np.linalg.norm(self.velocity)
if speed > self.max_speed:
self.velocity = (self.velocity / speed) * self.max_speed
def apply_behaviors(self, boids):
separation = self.separate(boids) * 1.5
alignment = self.align(boids) * 1.0
cohesion = self.cohesion(boids) * 1.0
self.velocity += separation + alignment + cohesion
def separate(self, boids):
desired_separation = 25
steer = np.zeros(2)
count = 0
for other in boids:
d = np.linalg.norm(self.position - other.position)
if 0 < d < desired_separation:
diff = self.position - other.position
diff /= d # Weight by distance
steer += diff
count += 1
if count > 0:
steer /= count
if np.linalg.norm(steer) > 0:
steer = (steer / np.linalg.norm(steer)) * self.max_speed - self.velocity
if np.linalg.norm(steer) > self.max_force:
steer = (steer / np.linalg.norm(steer)) * self.max_force
return steer
def align(self, boids):
neighbor_dist = 50
sum_vel = np.zeros(2)
count = 0
for other in boids:
d = np.linalg.norm(self.position - other.position)
if 0 < d < neighbor_dist:
sum_vel += other.velocity
count += 1
if count > 0:
avg_vel = sum_vel / count
avg_vel = (avg_vel / np.linalg.norm(avg_vel)) * self.max_speed
steer = avg_vel - self.velocity
if np.linalg.norm(steer) > self.max_force:
steer = (steer / np.linalg.norm(steer)) * self.max_force
return steer
else:
return np.zeros(2)
def cohesion(self, boids):
neighbor_dist = 50
center_mass = np.zeros(2)
count = 0
for other in boids:
d = np.linalg.norm(self.position - other.position)
if 0 < d < neighbor_dist:
center_mass += other.position
count += 1
if count > 0:
center_mass /= count
desired = center_mass - self.position
if np.linalg.norm(desired) > 0:
desired = (desired / np.linalg.norm(desired)) * self.max_speed
steer = desired - self.velocity
if np.linalg.norm(steer) > self.max_force:
steer = (steer / np.linalg.norm(steer)) * self.max_force
return steer
return np.zeros(2)
Visualization Mind Map
Mind Map: Visualization Components for Boids
Practical Example: Drone Swarm Flocking
-
Scenario: A swarm of 20 drones flying in formation to survey an area.
-
Implementation Details:
- Each drone runs the Boids algorithm onboard using local sensing (e.g., LIDAR or cameras) to detect neighbors.
- Communication is limited; drones rely primarily on local perception.
- Parameters tuned for safe separation to avoid collisions.
- Real-time adjustments allow the swarm to navigate around obstacles while maintaining flocking.
-
Outcome:
- Smooth, coordinated movement resembling natural bird flocking.
- Robustness to loss of individual drones without disrupting overall swarm behavior.
Summary
Implementing flocking behavior using the Boids algorithm provides a powerful, intuitive approach to achieving decentralized coordination in autonomous swarms. By focusing on simple local rules and leveraging real-world sensing or communication, engineers can create scalable and adaptive swarm systems. The example code and mind maps here serve as a practical foundation for further exploration and customization in various swarm robotics applications.
2.5 Case Study: Ant Colony Optimization in Robot Path Planning
Ant Colony Optimization (ACO) is a nature-inspired metaheuristic algorithm modeled after the foraging behavior of real ants. It has been widely applied in robot path planning to find optimal or near-optimal routes in complex environments. This case study explores how ACO can be engineered into swarm robotics for efficient path planning, highlighting best practices and practical examples.
Understanding Ant Colony Optimization (ACO)
- Ants deposit pheromones on paths they travel, influencing the probability of path selection by other ants.
- Over time, shorter paths accumulate stronger pheromone trails, guiding the colony toward optimal routes.
- In robotics, virtual pheromones and artificial ants simulate this behavior to solve path planning problems.
Mind Map: Core Concepts of ACO in Robot Path Planning
Best Practice: Implementing ACO for Robot Path Planning
-
Environment Representation: Model the robot’s workspace as a graph where nodes represent waypoints and edges represent traversable paths.
-
Initialization: Assign initial pheromone levels uniformly on all edges.
-
Artificial Ants Simulation: Deploy multiple agents (ants) to explore paths from start to goal based on pheromone intensity and heuristic desirability (e.g., distance).
-
Pheromone Update Rules:
- Increase pheromone on edges used by successful ants (shorter paths get more pheromone).
- Evaporate pheromone over time to avoid premature convergence.
-
Iteration and Convergence: Repeat the process until the algorithm converges to an optimal or satisfactory path.
-
Integration with Robot Control: Translate the planned path into robot motion commands.
Mind Map: ACO Algorithm Workflow
Practical Example: ACO for a Ground Robot Navigating a Maze
-
Scenario: A ground robot must find the shortest path from the maze entrance to the exit.
-
Step 1: Represent the maze as a grid graph; each cell is a node connected to adjacent cells.
-
Step 2: Initialize pheromone levels on all edges equally.
-
Step 3: Simulate multiple artificial ants starting at the entrance, probabilistically choosing next nodes based on pheromone and distance.
-
Step 4: After each iteration, update pheromone trails, reinforcing edges on shorter paths.
-
Step 5: After several iterations, the algorithm converges to the shortest path.
-
Step 6: The robot follows the computed path to exit the maze.
Mind Map: Example Maze Navigation Using ACO
Additional Example: Multi-Robot Path Planning with ACO
- Multiple robots coordinate to cover an area efficiently.
- Each robot acts as an ant depositing pheromone on paths it travels.
- The swarm collectively optimizes coverage paths, avoiding collisions and redundancy.
Summary of Best Practices in ACO for Robot Path Planning
- Parameter Tuning: Carefully tune pheromone evaporation rate and influence of heuristic information to balance exploration and exploitation.
- Scalability: Use parallel processing or distributed computation to handle larger swarms and environments.
- Hybrid Approaches: Combine ACO with other algorithms (e.g., A*, Dijkstra) for improved performance.
- Real-World Adaptation: Account for robot dynamics, sensor noise, and environmental uncertainties.
References and Further Reading
- Dorigo, M., & Stützle, T. (2004). Ant Colony Optimization. MIT Press.
- Kennedy, J., & Eberhart, R. (2001). Swarm Intelligence. Morgan Kaufmann.
- Example open-source ACO implementations for robotics: ACO-Robot-PathPlanning GitHub
This case study illustrates how Ant Colony Optimization provides a robust, biologically inspired framework for robot path planning within autonomous swarms, enabling efficient, adaptive navigation in complex environments.
3. Hardware Architectures for Autonomous Swarms
3.1 Designing Modular and Scalable Robot Platforms
Designing modular and scalable robot platforms is a cornerstone for building effective autonomous swarms. Modularity allows engineers to interchange components easily, adapt to different mission requirements, and simplify maintenance. Scalability ensures that the swarm can grow or shrink in size without a loss in performance or manageability.
Key Concepts in Modular and Scalable Design
- Modularity: Breaking down the robot into independent, interchangeable modules (e.g., sensors, actuators, control units).
- Scalability: Designing systems that maintain functionality and efficiency as the number of robots increases.
- Interoperability: Ensuring modules and robots can communicate and work together seamlessly.
- Standardization: Using common interfaces and protocols to simplify integration.
Mind Map: Components of Modular Robot Platforms
Best Practice: Designing for Easy Upgrades and Repairs
- Use plug-and-play connectors for electrical and data interfaces.
- Design mechanical parts with standard sizes and mounting holes.
- Separate power and communication lines to avoid interference.
- Document module specifications clearly.
Example: Modular Drone Platform
Consider a drone designed with the following modular architecture:
- Frame: Carbon fiber frame with standardized mounting points.
- Propulsion: Four brushless motors with quick-release mounts.
- Power: Swappable battery packs with standardized connectors.
- Sensors: Modular sensor pods (camera, LIDAR, GPS) that can be attached or detached.
- Control: Flight controller board with modular expansion slots.
This design allows swapping a damaged motor or upgrading the sensor suite without redesigning the entire drone.
Mind Map: Scalability Considerations in Swarm Platforms
Example: Scalable Ground Robot Platform
A ground robot designed for warehouse automation uses a modular design with:
- Base Unit: Standardized chassis with slots for different payloads.
- Payload Modules: Interchangeable trays or robotic arms.
- Communication: Mesh network radios that scale as more robots join.
- Control Software: Distributed task allocation allowing seamless addition of new units.
This approach enables the warehouse to increase the number of robots during peak times without redesigning the system.
Integration of Modularity and Scalability
When designing platforms, consider how modularity supports scalability:
- Modular hardware enables quick replication and customization of units.
- Software modularity allows adding new capabilities without rewriting core systems.
- Standardized interfaces ensure new modules or robots integrate smoothly into the swarm.
Summary
Designing modular and scalable robot platforms involves thoughtful partitioning of hardware and software into interchangeable units, standardizing interfaces, and planning for growth. By following these principles, engineers can build swarms that are adaptable, maintainable, and capable of evolving with mission demands.
For further reading, explore open-source modular platforms like the Crazyflie drone or TurtleBot ground robot, which exemplify these design principles in practice.
3.2 Sensor Suites for Environmental Awareness and Localization
In autonomous swarm systems, sensor suites are critical for enabling individual robots or drones to perceive their surroundings, localize themselves, and coordinate effectively with other agents. The choice and integration of sensors directly impact the swarm’s ability to navigate, avoid obstacles, and perform collective tasks.
Overview of Sensor Types
Sensors can be broadly categorized based on their function:
- Environmental Awareness Sensors: Detect obstacles, terrain, weather, and other external factors.
- Localization Sensors: Help the robot determine its position and orientation relative to the environment or other agents.
Common Sensors in Swarm Robotics
| Sensor Type | Function | Example Use Case |
|---|---|---|
| LIDAR | Distance measurement via laser scanning | Obstacle detection and mapping |
| Ultrasonic Sensors | Distance measurement using sound waves | Close-range obstacle avoidance |
| Cameras (RGB/Depth) | Visual perception and depth sensing | Object recognition, visual SLAM |
| IMU (Inertial Measurement Unit) | Measures acceleration and angular velocity | Orientation and motion tracking |
| GPS | Global positioning | Outdoor localization and navigation |
| Infrared Sensors | Proximity and heat detection | Short-range obstacle detection |
| Magnetometers | Detect magnetic fields | Compass heading for orientation |
Mind Map: Sensor Suite Components
Environmental Awareness Sensors Explained
LIDAR
- Provides high-resolution 3D or 2D maps of surroundings.
- Example: A drone swarm uses LIDAR to detect trees and buildings during a search and rescue mission.
Ultrasonic Sensors
- Cost-effective for short-range obstacle detection.
- Example: Ground robots in a warehouse use ultrasonic sensors to avoid collisions with shelves.
Cameras
- RGB cameras capture visual data; depth cameras provide distance information.
- Example: Robots use stereo cameras to identify and track moving objects in a dynamic environment.
Infrared Sensors
- Useful for detecting heat signatures or proximity in low-light conditions.
- Example: Robots detect human presence in dark environments using infrared sensors.
Localization Sensors Explained
GPS
- Provides global coordinates outdoors but limited indoors.
- Example: Drone swarms performing agricultural monitoring rely on GPS for field coverage.
IMU
- Combines accelerometers and gyroscopes to estimate orientation and movement.
- Example: Robots maintain balance and orientation during uneven terrain traversal.
Magnetometer
- Acts as a compass to provide heading information.
- Example: Robots navigate using magnetic north as a reference in GPS-denied environments.
Sensor Fusion: Combining Data for Robust Perception
Individual sensors have limitations; combining their data improves accuracy and reliability.
- Example: A drone integrates GPS, IMU, and LIDAR data to maintain precise localization even when GPS signals are weak.
Mind Map: Sensor Fusion Process
Practical Example: Sensor Suite in a Drone Swarm for Environmental Mapping
Scenario: A drone swarm tasked with mapping a forest area to monitor tree health.
- Each drone is equipped with:
- LIDAR for obstacle detection and 3D mapping.
- RGB cameras for visual inspection of foliage.
- GPS for global positioning.
- IMU for stable flight and orientation.
Best Practice: Use sensor fusion algorithms to combine LIDAR and GPS data, ensuring accurate positioning despite GPS signal fluctuations caused by dense canopy.
Outcome: The swarm efficiently covers the area, avoiding collisions and generating detailed environmental maps.
Best Practices for Designing Sensor Suites
- Modularity: Design sensor packages that can be easily upgraded or replaced.
- Redundancy: Include overlapping sensors to handle failures or inaccuracies.
- Power Efficiency: Balance sensor capabilities with power consumption to maximize operational time.
- Data Bandwidth: Consider communication constraints when selecting high-data-rate sensors like cameras.
- Calibration: Regularly calibrate sensors to maintain accuracy.
Summary
Sensor suites are the sensory organs of autonomous swarm robots and drones. Selecting the right combination of sensors and integrating their data through sensor fusion is essential for environmental awareness and precise localization. By following best practices and learning from practical examples, engineers can design robust sensor systems that empower swarms to operate effectively in complex, dynamic environments.
3.3 Communication Hardware: Radios, Infrared, and Beyond
Effective communication hardware is the backbone of any autonomous swarm system. It enables individual robots or drones to share information, coordinate actions, and collectively achieve complex tasks. In this section, we explore the primary communication hardware options used in swarm robotics, their advantages, limitations, and practical examples to help you choose the right technology for your swarm.
Overview of Communication Hardware Options
- Radio Frequency (RF) Communication
- Infrared (IR) Communication
- Ultrasonic Communication
- Visible Light Communication (VLC)
- Other Emerging Technologies (e.g., Li-Fi, Acoustic)
Radio Frequency (RF) Communication
RF communication is the most widely used method in swarm robotics due to its long range, robustness, and flexibility.
-
Common RF Technologies:
- Wi-Fi (2.4 GHz, 5 GHz bands)
- Zigbee (IEEE 802.15.4)
- Bluetooth and Bluetooth Low Energy (BLE)
- LoRa (Long Range, low power)
-
Advantages:
- Long communication range (meters to kilometers depending on power and frequency)
- Supports mesh networking for scalable swarms
- Penetrates obstacles better than optical methods
-
Limitations:
- Potential interference in crowded RF environments
- Higher power consumption compared to some alternatives
Example: A swarm of drones used for agricultural monitoring employs Zigbee modules to form a mesh network, allowing each drone to relay sensor data back to a central base station even if some drones are out of direct range.
Infrared (IR) Communication
Infrared communication uses light waves just beyond the visible spectrum. It is typically used for short-range, line-of-sight communication.
-
Advantages:
- Low power consumption
- Simple hardware and low cost
- Immune to RF interference
-
Limitations:
- Requires line-of-sight, limiting flexibility
- Short communication range (usually a few centimeters to meters)
- Susceptible to ambient light interference
Example: Small ground robots in a swarm use IR transceivers to exchange proximity and status information when they are physically close, enabling collision avoidance and formation control.
Ultrasonic Communication
Ultrasonic communication uses high-frequency sound waves and is often used for proximity sensing but can also be adapted for data communication.
-
Advantages:
- Useful in environments where RF or IR is unreliable
- Can provide distance measurements and communication simultaneously
-
Limitations:
- Limited bandwidth and range
- Affected by environmental noise and obstacles
Example: In underwater swarm robots where RF signals are ineffective, ultrasonic communication enables coordination and data exchange.
Visible Light Communication (VLC) and Li-Fi
VLC uses LEDs to transmit data via modulated light signals, offering high bandwidth and security.
-
Advantages:
- High data rates
- No RF interference
- Secure, as light does not penetrate walls
-
Limitations:
- Requires line-of-sight or reflective surfaces
- Affected by ambient lighting conditions
Example: Indoor drone swarms use VLC to communicate precise positional data in environments where RF congestion is high.
Mind Map: Communication Hardware Options in Autonomous Swarms
Best Practice: Selecting Communication Hardware for Your Swarm
- Define Operational Environment: Indoor, outdoor, underwater, or mixed?
- Consider Range Requirements: Short-range IR may suffice for close-proximity ground robots; long-range RF is better for aerial drones.
- Evaluate Power Constraints: Low-power IR or BLE modules are ideal for battery-limited robots.
- Assess Interference Risks: Avoid RF-heavy environments or use frequency hopping.
- Plan for Scalability: Mesh-capable RF technologies help maintain connectivity as swarm size grows.
Example: A warehouse robot swarm uses BLE for short-range communication between robots and Wi-Fi to communicate with the central control system, balancing power efficiency and range.
Hybrid Communication Systems
Many advanced swarms combine multiple communication hardware types to leverage their strengths and mitigate weaknesses.
Example: A drone swarm uses RF for long-range coordination and IR for close-proximity collision avoidance, ensuring robust communication across different operational contexts.
Summary
Choosing the right communication hardware is critical to the success of autonomous swarms. By understanding the trade-offs between radios, infrared, ultrasonic, and emerging technologies, engineers can design systems that are robust, efficient, and scalable. Practical examples and hybrid approaches demonstrate how these technologies can be integrated to meet diverse application needs.
3.4 Power Management Strategies for Extended Operations
Power management is a critical aspect of engineering autonomous swarms, especially for drones and robots that operate untethered in the field. Efficient power management ensures longer mission durations, reliability, and overall system sustainability.
Key Power Management Strategies
- Energy-Efficient Hardware Design
- Dynamic Power Allocation
- Energy Harvesting Techniques
- Battery Management and Monitoring
- Swarm-Level Energy Coordination
Mind Map: Power Management Strategies Overview
Energy-Efficient Hardware Design
Selecting components optimized for low power consumption is foundational. For example, using brushless DC motors with high efficiency can significantly reduce energy use in drones. Lightweight materials reduce the energy required for movement.
Example: The Crazyflie nano drone uses an ultra-light frame and low-power microcontrollers to maximize flight time despite its small battery.
Dynamic Power Allocation
Swarm robots can dynamically adjust their power usage based on mission requirements. This includes putting non-essential components into sleep mode or reducing sensor sampling rates when full precision is not needed.
Example: In a surveillance swarm, drones can reduce camera frame rates during low-activity periods to conserve battery.
Mind Map: Dynamic Power Allocation Techniques
Energy Harvesting Techniques
Incorporating energy harvesting can extend operational time. Solar panels on drones or robots can recharge batteries during idle periods or even in-flight.
Example: The SolarX drone integrates flexible solar cells on its wings, enabling multi-hour flights by supplementing battery power.
Battery Management and Monitoring
Accurate state-of-charge (SoC) estimation and thermal management prevent unexpected power loss and prolong battery life.
Example: The DJI Matrice series uses advanced battery management systems that monitor voltage, current, and temperature to optimize charging and discharging cycles.
Swarm-Level Energy Coordination
Swarm intelligence can be leveraged to balance energy consumption across the group. Robots with higher battery levels can take on more energy-intensive tasks, while others conserve power.
Example: In a delivery drone swarm, drones with low battery return to charging stations while others continue deliveries, coordinated through a centralized or decentralized energy-aware scheduler.
Mind Map: Swarm-Level Energy Coordination
Summary
Effective power management in autonomous swarms combines hardware choices, adaptive control, energy harvesting, and intelligent swarm coordination. By integrating these strategies, engineers can significantly extend mission durations and improve the reliability of swarm robotic systems.
Practical Takeaway
Start by profiling your hardware’s power consumption, then implement dynamic power allocation strategies tailored to your swarm’s mission profile. Consider energy harvesting if the environment permits, and design swarm-level coordination algorithms that optimize energy usage collectively.
3.5 Best Practice: Building a Low-Cost Drone Swarm Using Off-the-Shelf Components
Building a low-cost drone swarm is an excellent way to prototype and experiment with swarm robotics without requiring a large budget or complex custom hardware. This section walks you through the best practices, key components, and practical examples to get started with an affordable, scalable drone swarm using readily available parts.
Key Considerations for Low-Cost Drone Swarm Design
- Affordability: Use widely available, inexpensive components to minimize cost per drone.
- Modularity: Design drones so components can be easily swapped or upgraded.
- Scalability: Ensure the design supports adding more drones without significant overhead.
- Communication: Choose simple but effective communication protocols suitable for multiple drones.
- Control: Implement decentralized control algorithms to reduce dependency on complex infrastructure.
Mind Map: Components of a Low-Cost Drone Swarm
Step-by-Step Example: Building a 5-Drone Swarm
-
Select the Frame: Use a 250mm mini quadcopter frame available on platforms like Amazon or hobby stores. Alternatively, 3D print lightweight frames using PLA or carbon fiber reinforced filament.
-
Choose Flight Controllers: Use affordable open-source flight controllers such as the Betaflight F4 or Pixhawk Mini. These support common firmware and have community support.
-
Motors and ESCs: Select 1806 or 2205 brushless motors paired with 20A ESCs. These provide sufficient thrust for small drones and are cost-effective.
-
Power System: Use 3S LiPo batteries (11.1V) with 1000-1500mAh capacity to balance flight time and weight.
-
Sensors: Integrate MPU6050 IMU modules for orientation and stabilization. Add ultrasonic sensors (e.g., HC-SR04) for basic obstacle avoidance.
-
Communication: Equip each drone with NRF24L01 2.4 GHz RF transceiver modules for peer-to-peer communication. These modules are inexpensive and support mesh networking.
-
Software Setup: Flash Betaflight or ArduPilot firmware on flight controllers. Implement a simple decentralized swarm algorithm such as leaderless flocking using local communication.
-
Testing: Begin with single drone flight tests to calibrate sensors and controls. Progress to two-drone coordinated flights before scaling to the full swarm.
Mind Map: Example Swarm Coordination Algorithm (Leaderless Flocking)
Practical Tips
- Component Sourcing: Purchase components in bulk from hobbyist suppliers or online marketplaces to reduce costs.
- Calibration: Regularly calibrate sensors and ESCs to maintain flight stability.
- Power Management: Monitor battery voltage and implement failsafe return-to-home or landing behaviors.
- Communication Range: Test communication modules in the intended environment to ensure reliable connectivity.
- Open-Source Resources: Leverage community-developed firmware and swarm algorithms to accelerate development.
Real-World Example: DIY Drone Swarm for Environmental Monitoring
A university research group built a 10-drone swarm using off-the-shelf frames, Pixhawk flight controllers, and NRF24L01 radios. They implemented a decentralized flocking algorithm allowing drones to maintain formation while scanning an agricultural field for crop health. The low-cost design enabled rapid prototyping and iterative improvements, demonstrating the feasibility of affordable swarm robotics in real applications.
By following these best practices and leveraging accessible components, robotics engineers and researchers can effectively build and experiment with autonomous drone swarms without prohibitive costs, accelerating innovation in swarm robotics.
4. Control Systems for Swarm Coordination
4.1 Centralized vs Decentralized Control Architectures
In swarm robotics and autonomous systems, control architecture defines how decision-making and coordination occur among the individual agents. The two primary paradigms are centralized and decentralized control architectures. Understanding their differences, advantages, and limitations is crucial for designing effective swarm systems.
Centralized Control Architecture
In a centralized control system, a single central controller or a master node governs the behavior of all agents in the swarm. This controller collects data from all agents, processes it, and sends commands back to coordinate the swarm’s actions.
Key Characteristics:
- Single point of decision-making
- Global knowledge of the swarm state
- Easier to implement complex global strategies
Advantages:
- Optimal decision-making possible due to global information
- Simplified coordination logic at agent level
- Easier to monitor and debug
Disadvantages:
- Single point of failure: if the central controller fails, the entire swarm may become inoperative
- Scalability issues as the number of agents increases
- Communication bottlenecks and latency
Example: Consider a drone swarm performing aerial mapping where a central base station collects sensor data from all drones, plans the flight paths, and sends commands.
Decentralized Control Architecture
In decentralized control, there is no single controlling entity. Each agent makes decisions based on local information and interactions with neighbors. The global behavior emerges from these local interactions.
Key Characteristics:
- Distributed decision-making
- Local communication and sensing
- Emergent global behavior
Advantages:
- High robustness and fault tolerance
- Scalability to large numbers of agents
- Reduced communication overhead
Disadvantages:
- Potentially suboptimal global performance
- Complex local control algorithms
- Difficult to guarantee convergence or stability
Example: A swarm of ground robots performing area coverage where each robot moves based on the positions of nearby robots and obstacles, without a central coordinator.
Hybrid Control Architectures
Many modern swarm systems adopt hybrid architectures that combine centralized and decentralized elements to leverage the strengths of both.
- Central controller sets high-level goals or parameters
- Agents execute decentralized behaviors locally
Example: A drone delivery swarm where a central server assigns delivery zones, but drones coordinate collision avoidance and path adjustments locally.
Practical Example: Centralized vs Decentralized in Search and Rescue
- Centralized: A command center receives all sensor feeds, plans search patterns, and directs each robot.
- Decentralized: Robots share local maps and coordinate with neighbors to cover the area collaboratively.
Best Practice:
- Use centralized control when the environment is structured and communication is reliable.
- Use decentralized control in dynamic, unpredictable environments where robustness is key.
Summary Table
| Aspect | Centralized Control | Decentralized Control |
|---|---|---|
| Decision Making | Single central controller | Distributed among agents |
| Communication | High bandwidth to/from controller | Local, peer-to-peer |
| Scalability | Limited by controller capacity | Highly scalable |
| Robustness | Vulnerable to single point failure | Highly fault tolerant |
| Complexity | Simpler agents, complex controller | Complex agent algorithms |
| Example Application | Drone swarm mapping | Ground robot area coverage |
By carefully selecting and sometimes combining control architectures, engineers can tailor swarm systems to meet specific mission requirements, balancing efficiency, robustness, and scalability.
4.2 Distributed Control Algorithms: Consensus and Leader Election
Distributed control algorithms are fundamental to enabling autonomous swarms to operate cohesively without relying on a centralized controller. Two pivotal concepts in this domain are consensus algorithms and leader election protocols. These algorithms empower swarms to agree on shared information and designate coordinators dynamically, ensuring robustness, scalability, and fault tolerance.
What is Distributed Control?
Distributed control refers to the paradigm where multiple agents (robots or drones) make decisions based on local information and communication with neighbors, rather than a single centralized entity. This approach enhances the swarm’s resilience to failures and adaptability in dynamic environments.
Consensus Algorithms
Consensus algorithms allow a group of agents to agree on a certain quantity or decision, such as position, velocity, or task allocation. The goal is for all agents to converge to the same value through iterative information exchange.
Key Properties:
- Convergence: All agents reach agreement within finite time.
- Robustness: Tolerant to communication delays and agent failures.
- Scalability: Performance remains effective as swarm size grows.
Common Consensus Algorithms:
- Average Consensus: Agents iteratively update their states to the average of their neighbors’ states.
- Max/Min Consensus: Agents agree on the maximum or minimum value in the network.
Example: Average Consensus for Position Alignment
Imagine a swarm of drones needing to align their altitude for formation flying. Each drone updates its altitude by averaging its own altitude with those of its neighbors.
Step-by-step:
- Each drone measures its current altitude.
- It receives altitude data from neighboring drones.
- It updates its altitude to the average of these values.
- Repeat until all drones converge to a common altitude.
This simple rule leads to smooth and decentralized altitude alignment without a leader.
Leader Election Algorithms
Leader election is the process by which swarm members dynamically select a coordinator or leader to guide certain tasks, such as decision-making or task assignment. This is crucial when centralized coordination is temporarily necessary.
Why Leader Election?
- To break symmetry in homogeneous swarms.
- To coordinate complex tasks requiring a reference point.
- To improve efficiency in communication and control.
Popular Leader Election Protocols:
- Bully Algorithm: Agents with higher IDs can preempt lower ones to become leader.
- Ring Algorithm: Agents arranged logically in a ring pass messages to elect a leader.
- Randomized Election: Agents probabilistically elect a leader to avoid conflicts.
Example: Bully Algorithm in a Robot Swarm
Consider a swarm of ground robots with unique IDs. When a leader fails, the remaining robots initiate the bully algorithm to elect the robot with the highest ID as the new leader.
Step-by-step:
- A robot detects the leader is unresponsive.
- It sends an election message to robots with higher IDs.
- If no higher ID responds, it declares itself leader.
- If a higher ID responds, that robot takes over election.
- The process continues until the highest ID robot is leader.
This ensures a clear and conflict-free leader election in a distributed manner.
Integrated Example: Consensus with Leader Election in Search and Rescue Swarm
In a search and rescue mission, a swarm of drones needs to agree on the best search area (consensus) and elect a leader drone to coordinate resource allocation.
- Consensus: Drones share sensor data to agree on the most promising search zones.
- Leader Election: If the current leader drone loses connectivity, the swarm elects a new leader using the bully algorithm.
This combination ensures continuous, coordinated operation even under failures.
Best Practices for Implementing Distributed Control Algorithms
- Design for Local Communication: Ensure algorithms rely on neighbor-to-neighbor messaging to reduce communication overhead.
- Incorporate Fault Detection: Integrate mechanisms to detect and handle failed or unresponsive agents.
- Simulate Before Deployment: Use simulation tools to test convergence and robustness under various conditions.
- Optimize for Scalability: Choose algorithms whose complexity grows gracefully with swarm size.
- Hybrid Approaches: Combine consensus and leader election to balance decentralization with coordinated control.
Summary
Distributed control algorithms like consensus and leader election are cornerstones of autonomous swarm engineering. They enable swarms to operate cohesively, adapt to failures, and scale efficiently. By understanding and applying these algorithms with practical examples, engineers can build robust and intelligent swarm systems.
4.3 Fault Tolerance and Robustness in Control Systems
Fault tolerance and robustness are critical aspects of control systems in autonomous swarms. Given the distributed nature and the often unpredictable environments in which swarms operate, ensuring that the system can continue functioning despite failures or unexpected disturbances is essential for mission success.
What is Fault Tolerance and Robustness?
- Fault Tolerance: The ability of a system to continue operating properly in the event of the failure of some of its components.
- Robustness: The capacity of a system to maintain performance despite external disturbances, uncertainties, or internal variations.
Why Are They Important in Swarm Control Systems?
- Swarms consist of many agents; individual failures should not compromise the entire mission.
- Communication loss, sensor errors, or actuator malfunctions are common in real-world deployments.
- Environmental uncertainties like wind, obstacles, or signal interference require adaptive and resilient control.
Key Strategies for Fault Tolerance and Robustness
Mind Map: Fault Tolerance and Robustness Strategies
Redundancy
Example: In a drone swarm, hardware redundancy might involve multiple sensors (e.g., GPS + IMU + visual odometry) to ensure localization even if one sensor fails.
- Behavioral redundancy means multiple robots can perform the same task, so if one fails, others compensate.
Distributed Control
Centralized control is a single point of failure. Distributed control allows the swarm to continue operating if some agents fail.
Example: Using consensus algorithms, drones agree on a formation or target location even if some drones drop out.
Fault Detection and Diagnosis
Early detection of faults allows the system to react before failure cascades.
Example: A robot monitors its battery voltage and sensor readings; if anomalies are detected, it signals the swarm and switches to a safe mode.
Recovery and Reconfiguration
When faults occur, the swarm can reassign roles or change formation to maintain mission objectives.
Example: In a search-and-rescue mission, if a robot loses mobility, nearby robots adjust their search patterns to cover the gap.
Robust Control Design
Control algorithms designed to handle uncertainties and disturbances improve swarm resilience.
Example: Sliding mode control can maintain stable flight in drones despite wind gusts.
Communication Resilience
Robust communication protocols ensure information flow despite interference or node failures.
Example: Mesh networking allows drones to relay messages through multiple paths, avoiding communication blackouts.
Practical Example: Fault Tolerant Swarm Formation Control
Consider a swarm of 10 ground robots tasked with maintaining a V-formation while navigating a cluttered environment.
- Fault Scenario: One robot’s wheel actuator fails.
- Fault Detection: The robot detects abnormal motor current and reports failure.
- Recovery: Neighboring robots adjust their positions to fill the gap.
- Control Strategy: Distributed consensus algorithm recalculates formation geometry.
Mind Map: Fault Tolerant Formation Control
Summary
Fault tolerance and robustness in swarm control systems are achieved through a combination of redundancy, distributed control, fault detection, adaptive recovery, robust control algorithms, and resilient communication. By designing systems with these principles, engineers can ensure that autonomous swarms perform reliably in complex, real-world scenarios.
Further Reading and Tools
- Distributed Consensus in Multi-Agent Systems by Reza Olfati-Saber et al.
- ROS (Robot Operating System) packages for fault detection and recovery
- Simulation platforms like Gazebo for testing fault scenarios
This section integrates best practices with concrete examples and mind maps to provide a clear understanding of fault tolerance and robustness in swarm control systems.
4.4 Best Practice: Implementing Distributed Consensus with Practical Example
Distributed consensus is a fundamental control strategy in swarm robotics that enables multiple autonomous agents to agree on a certain piece of information or decision without relying on a centralized controller. This approach enhances robustness, scalability, and fault tolerance in swarm systems.
What is Distributed Consensus?
Distributed consensus refers to the process by which a group of agents (robots, drones, etc.) reach agreement on a single data value or course of action, despite possible communication delays, failures, or asynchronous operation.
Why is Distributed Consensus Important in Swarms?
- Decentralization: Avoids single points of failure.
- Scalability: Works efficiently as swarm size increases.
- Robustness: Tolerates agent failures and communication dropouts.
Core Concepts of Distributed Consensus
Popular Distributed Consensus Algorithms
-
Average Consensus Algorithm
- Agents iteratively exchange state information and update their values to converge on the average.
-
Gossip Protocols
- Randomized communication between agents to spread information efficiently.
-
Leader Election Algorithms
- Elect a coordinator dynamically to guide swarm decisions.
Practical Example: Average Consensus for Heading Alignment in a Drone Swarm
Scenario: A swarm of drones needs to align their heading direction to fly cohesively without a central controller.
Step-by-step Implementation:
- Initialization: Each drone starts with its own heading angle.
- Communication: Each drone shares its heading with its immediate neighbors.
- Update Rule: Each drone updates its heading to the average of its own and neighbors’ headings.
- Iteration: Repeat communication and update until headings converge.
Pseudocode:
for each drone i:
heading_i = initial_heading_i
while not converged:
for each drone i:
neighbor_headings = get_headings_of_neighbors(i)
heading_i = average([heading_i] + neighbor_headings)
Result: Over iterations, all drones align their headings, demonstrating consensus.
Mind Map: Average Consensus Algorithm Workflow
Example Code Snippet (Python Simulation)
import numpy as np
# Number of drones
N = 5
# Initial headings (degrees)
headings = np.array([10, 50, 80, 20, 60], dtype=float)
# Adjacency matrix defining neighbors (undirected graph)
adjacency = np.array([
[0,1,0,1,0],
[1,0,1,0,0],
[0,1,0,1,1],
[1,0,1,0,1],
[0,0,1,1,0]
])
# Function to perform one consensus iteration
def consensus_step(headings, adjacency):
new_headings = np.copy(headings)
for i in range(len(headings)):
neighbors = np.where(adjacency[i] == 1)[0]
neighbor_headings = headings[neighbors]
new_headings[i] = np.mean(np.append(neighbor_headings, headings[i]))
return new_headings
# Run consensus iterations
for iteration in range(20):
headings = consensus_step(headings, adjacency)
print(f"Iteration {iteration+1}: Headings = {headings.round(2)}")
# After iterations, headings converge to a common value
Key Takeaways and Best Practices
- Local Communication: Limit communication to neighbors to reduce bandwidth and improve scalability.
- Iterative Updates: Consensus emerges over multiple iterations; patience is key.
- Robustness: Design update rules to handle dropped messages or delayed communication.
- Convergence Criteria: Define thresholds to determine when consensus is achieved.
- Testing: Simulate with varying network topologies and agent failures.
Additional Example: Leader Election via Bully Algorithm
In some scenarios, swarms may need to elect a leader for coordination.
Bully Algorithm Overview:
- Agents with unique IDs communicate.
- The highest ID agent becomes the leader.
- If leader fails, election restarts.
Mind Map:
Best Practice: Use leader election sparingly; prefer fully distributed consensus for robustness.
Summary
Distributed consensus is a cornerstone technique for swarm coordination. Implementing average consensus algorithms enables drones or robots to align states such as heading, position, or task allocation without centralized control. By following best practices—focusing on local communication, iterative updates, and robust design—engineers can build scalable and resilient swarm systems.
For further reading, consider exploring:
- “Distributed Consensus in Multi-robot Systems” by Olfati-Saber et al.
- Simulation tools like ROS with Gazebo for practical swarm experiments.
4.5 Case Study: Control Strategies in Search and Rescue Robot Swarms
Search and rescue (SAR) operations present unique challenges that require rapid, coordinated, and adaptive responses. Autonomous robot swarms have emerged as a promising solution to enhance the efficiency, coverage, and safety of SAR missions. This case study explores control strategies employed in SAR robot swarms, illustrating best practices with practical examples and mind maps to clarify complex concepts.
Overview of Search and Rescue Robot Swarms
SAR robot swarms typically consist of multiple autonomous agents—drones, ground robots, or hybrid systems—that collaborate to locate victims, assess hazards, and relay critical information to human responders. The control strategies must balance autonomy, coordination, robustness, and adaptability.
Key Control Strategy Categories in SAR Swarms
Example 1: Decentralized Consensus-Based Exploration
Scenario: A swarm of 20 ground robots is deployed in a collapsed building to locate survivors.
Control Strategy: Each robot uses a decentralized consensus algorithm to share discovered information and decide on unexplored areas to cover, minimizing overlap and maximizing coverage.
Best Practice: Implementing a distributed consensus protocol such as the Average Consensus Algorithm enables robots to agree on the map status and coordinate exploration without a central controller.
Example Workflow:
Outcome: The swarm efficiently covers the environment, dynamically reallocating robots to unexplored or high-priority zones, improving search speed and reliability.
Example 2: Leader-Follower Hybrid Control for Aerial-Ground Coordination
Scenario: A mixed swarm of 5 drones and 10 ground robots is tasked with searching a forested area after a natural disaster.
Control Strategy: A leader drone acts as a mobile command unit, providing global situational awareness and coordinating ground robot movements. Ground robots operate semi-autonomously but follow high-level commands from the leader.
Best Practice: Use a hierarchical control system where the leader drone aggregates sensor data, plans search patterns, and sends commands, while ground robots execute local navigation and obstacle avoidance.
Example Workflow:
Outcome: This approach leverages the aerial perspective for strategic planning while maintaining decentralized robustness at the ground level, resulting in efficient and adaptive search operations.
Fault Tolerance and Robustness in SAR Swarm Control
SAR environments are unpredictable, so control strategies must handle robot failures gracefully.
Example: In a decentralized swarm, if a robot loses communication or malfunctions, neighbors detect the failure via missed heartbeat messages and redistribute tasks to maintain coverage.
Practical Implementation Tips
- Simulate extensively: Use simulation environments (e.g., ROS with Gazebo, Webots) to test control algorithms in realistic SAR scenarios.
- Start with simple behaviors: Implement basic exploration and communication before adding complex consensus or hybrid control layers.
- Prioritize communication reliability: Use mesh networking and redundant communication channels to maintain swarm cohesion.
- Incorporate adaptive behaviors: Allow robots to switch roles or behaviors based on mission progress and environmental feedback.
Summary
Control strategies in search and rescue robot swarms must balance coordination, robustness, and adaptability. Decentralized consensus algorithms enable scalable exploration, while hybrid leader-follower models leverage the strengths of heterogeneous platforms. Fault tolerance mechanisms ensure mission continuity despite individual robot failures. By integrating these strategies with best practices, engineers can design effective SAR swarms that save lives and enhance operational efficiency.
5. Communication Protocols and Networking in Swarms
5.1 Network Topologies Suitable for Swarm Systems
In swarm robotics and autonomous systems, the choice of network topology plays a crucial role in ensuring efficient communication, coordination, and robustness among agents. Network topology defines how individual robots or drones are interconnected and how information flows within the swarm.
Common Network Topologies in Swarm Systems
-
Star Topology
- Centralized communication hub.
- All nodes connect to a single central node.
- Simple to implement but has a single point of failure.
-
Mesh Topology
- Each node connects to multiple other nodes.
- Highly robust and fault-tolerant.
- Enables multi-hop communication.
-
Ring Topology
- Nodes connected in a closed loop.
- Data travels in one or both directions.
- Moderate fault tolerance.
-
Tree Topology
- Hierarchical structure with parent-child relationships.
- Combines star and bus topologies.
- Efficient for command dissemination.
-
Fully Connected Topology
- Every node connects to every other node.
- Maximum redundancy and robustness.
- Not scalable for large swarms due to communication overhead.
Mind Map: Network Topologies Overview
Best Practice: Choosing the Right Topology
- Scalability: Mesh and tree topologies scale better than star or fully connected.
- Robustness: Mesh topology offers excellent fault tolerance.
- Latency: Star topology can have lower latency but risks central node failure.
- Energy Efficiency: Minimizing communication overhead is key in battery-powered swarms.
Example 1: Mesh Topology in Drone Swarms for Search and Rescue
In a search and rescue mission, a drone swarm uses a mesh network topology. Each drone communicates with its neighbors, forwarding critical data like GPS coordinates and sensor readings. This multi-hop communication ensures that even if some drones lose direct connection to the base station, information still propagates through the network.
- Benefits:
- Robust against drone failures.
- Dynamic reconfiguration as drones move.
- Efficient coverage with decentralized control.
Example 2: Star Topology in Small Indoor Robot Swarms
In a controlled indoor environment, a small swarm of ground robots uses a star topology with a central controller coordinating tasks. The central node sends commands and collects status updates.
-
Benefits:
- Simplified control and monitoring.
- Lower communication complexity.
-
Drawbacks:
- If the central controller fails, the entire swarm loses coordination.
Mind Map: Example Use Cases and Topologies
Hybrid Topologies
Often, swarms implement hybrid topologies combining the strengths of multiple types. For instance, a tree-mesh hybrid where local clusters form mesh networks connected via a tree structure to a base station.
- Example: Agricultural drone swarms may use mesh networks within fields and a tree topology to relay data to a central hub.
Summary
Selecting an appropriate network topology depends on swarm size, mission requirements, environmental constraints, and hardware capabilities. Understanding these topologies and their trade-offs enables engineers to design resilient, efficient communication frameworks for autonomous swarms.
5.2 Wireless Communication Challenges and Solutions
Wireless communication is the backbone of autonomous swarm systems, enabling coordination, data exchange, and collective decision-making. However, designing reliable wireless communication for swarms presents unique challenges due to the dynamic, distributed, and often harsh environments in which these systems operate. This section explores the primary challenges and practical solutions, supported by mind maps and real-world examples.
Key Wireless Communication Challenges in Autonomous Swarms
Solutions and Best Practices
Mind Map: Wireless Communication Challenges and Solutions
Mind Map: Wireless Communication in Autonomous Swarms
Example 1: Mesh Networking in Drone Swarms
Scenario: A drone swarm deployed for search and rescue in a disaster zone where infrastructure is damaged.
Challenge: Maintaining communication despite obstacles, node mobility, and interference.
Solution: Implementing a mesh network using ZigBee protocol, drones dynamically route data through neighbors to reach the base station. This decentralized approach handles node failures and topology changes gracefully.
Outcome: Reliable data transmission with self-healing network capabilities, enabling continuous coordination.
Example 2: Frequency Hopping to Mitigate Interference
Scenario: Agricultural robot swarm operating near industrial sites with heavy wireless interference.
Challenge: Signal degradation and packet loss due to electromagnetic interference.
Solution: Employing Frequency Hopping Spread Spectrum (FHSS) communication, where robots rapidly switch frequencies in a pseudo-random sequence.
Outcome: Reduced interference impact, improved communication reliability, and sustained swarm coordination.
Example 3: Energy-Aware Communication in Ground Robot Swarms
Scenario: A swarm of ground robots performing environmental monitoring in a remote forest.
Challenge: Limited battery life constrains communication frequency and range.
Solution: Robots use duty cycling to turn off radios when idle and employ power-aware routing to minimize transmission distances.
Outcome: Extended operational time without sacrificing critical data exchange.
Summary
Wireless communication in autonomous swarms must overcome interference, bandwidth limits, dynamic topologies, and energy constraints. By combining robust protocols, adaptive frequency management, energy-efficient strategies, and security measures, engineers can design resilient communication systems that enable effective swarm coordination even in challenging environments.
This integrated approach ensures that autonomous swarms maintain high performance, scalability, and reliability, which are essential for real-world applications.
5.3 Data Sharing and Synchronization Techniques
In autonomous swarm systems, effective data sharing and synchronization are critical to ensure coherent collective behavior and mission success. Swarm members must exchange information about their states, environment, and intentions in a timely and reliable manner despite constraints like limited bandwidth, latency, and potential communication failures.
Key Concepts in Data Sharing and Synchronization
- Data Sharing: The process by which swarm agents exchange information to maintain situational awareness and coordinate actions.
- Synchronization: Ensuring that agents have a consistent view of shared data or states, enabling coordinated decision-making.
- Scalability: Techniques must work efficiently as swarm size increases.
- Robustness: Systems should tolerate communication delays, packet loss, or node failures.
Mind Map: Overview of Data Sharing and Synchronization Techniques
Communication Models for Data Sharing
-
Broadcast Communication: Agents send data to all neighbors simultaneously.
- Example: A drone broadcasting its position to nearby drones to maintain formation.
-
Gossip Protocols: Each agent randomly selects neighbors to share data, propagating information probabilistically.
- Example: Robots sharing discovered obstacle locations gradually across the swarm.
-
Peer-to-Peer Communication: Direct data exchange between pairs of agents.
- Example: Two robots negotiating task allocation.
Synchronization Techniques
Time Synchronization
- Essential for coordinating actions and timestamping shared data.
- Methods include:
- Network Time Protocol (NTP) adaptations for robots.
- Pulse-coupled oscillators inspired by firefly synchronization.
Example: Synchronizing drone cameras to capture images simultaneously for 3D reconstruction.
State Synchronization
- Ensures all agents agree on shared variables like formation shape or target location.
- Achieved via consensus algorithms or distributed shared memory.
Example: Robots agreeing on a leader’s position before moving.
Mind Map: Consensus Algorithms for Synchronization
Best Practice Example: Implementing a Gossip Protocol for Obstacle Sharing
Scenario: A swarm of ground robots exploring an unknown environment needs to share detected obstacles to avoid collisions.
Implementation Steps:
- Each robot maintains a local map of obstacles.
- Periodically, each robot selects a random neighbor and exchanges obstacle data.
- Upon receiving new data, the robot merges it with its local map.
- Over time, obstacle information propagates throughout the swarm.
Benefits:
- Scalable to large swarms.
- Robust to communication failures.
- Low communication overhead.
Example Code Snippet (Pseudocode):
class Robot:
def __init__(self):
self.local_map = set()
self.neighbors = []
def detect_obstacle(self, obstacle):
self.local_map.add(obstacle)
def gossip(self):
if not self.neighbors:
return
neighbor = random.choice(self.neighbors)
# Exchange maps
new_data = neighbor.send_map()
self.local_map.update(new_data)
def send_map(self):
return self.local_map
Example: Distributed Database Synchronization in Drone Swarms
In a drone delivery swarm, each drone maintains a local database of delivery tasks and package statuses. To keep data consistent:
- Drones use a distributed database system with eventual consistency.
- Updates are propagated asynchronously.
- Conflict resolution strategies (e.g., last-write-wins or vector clocks) handle concurrent modifications.
This approach allows drones to operate independently while maintaining a coherent global state.
Challenges and Mitigation Strategies
| Challenge | Description | Mitigation Strategy |
|---|---|---|
| Latency | Delays in data propagation | Use asynchronous communication, prioritize critical data |
| Packet Loss | Lost messages causing inconsistent data | Employ redundancy, acknowledgments, and retransmissions |
| Scalability | Increased communication overhead with swarm size | Use localized communication, gossip protocols, hierarchical structures |
| Data Conflicts | Conflicting updates from multiple agents | Implement conflict resolution algorithms, consensus protocols |
Summary
Effective data sharing and synchronization in autonomous swarms rely on choosing appropriate communication models and synchronization techniques tailored to the swarm’s mission and constraints. Techniques like gossip protocols and consensus algorithms provide scalable and robust solutions. Incorporating best practices such as asynchronous updates, conflict resolution, and time synchronization ensures reliable collective intelligence and coordinated swarm behavior.
5.4 Best Practice: Designing a Reliable Mesh Network for Drone Swarms
Designing a reliable mesh network is critical for effective communication and coordination within drone swarms. A mesh network enables drones to communicate directly with each other, forming a decentralized and robust communication topology that can adapt dynamically to node failures or environmental changes.
Key Principles of Mesh Networking in Drone Swarms
- Decentralization: No single point of failure; each drone acts as a node that can relay messages.
- Self-Healing: The network automatically reroutes data if a node fails or moves out of range.
- Scalability: The network can grow or shrink dynamically as drones join or leave.
- Low Latency: Ensures timely data exchange critical for coordination.
- Energy Efficiency: Minimizes power consumption to extend drone operational time.
Mind Map: Core Components of a Reliable Mesh Network
Step-by-Step Guide to Designing a Mesh Network
-
Select Appropriate Communication Hardware:
- Use radios supporting mesh protocols (e.g., 2.4 GHz Wi-Fi modules with mesh capabilities).
- Example: ESP32 modules with built-in Wi-Fi and Bluetooth mesh support.
-
Choose a Mesh Protocol:
- For drone swarms, IEEE 802.11s or custom lightweight protocols optimized for mobility and low latency are preferred.
- Example: Using BATMAN (Better Approach To Mobile Adhoc Networking) protocol for dynamic routing.
-
Implement Robust Routing Algorithms:
- Use reactive routing like AODV to reduce overhead in highly dynamic drone networks.
- Example: A drone detects a lost link and quickly finds an alternative path to maintain communication.
-
Incorporate Node Discovery and Link Quality Metrics:
- Periodically broadcast beacon messages to discover neighbors.
- Measure signal strength (RSSI) and packet loss to assess link quality.
- Example: A drone switches to a stronger neighbor node when signal quality drops.
-
Ensure Security and Authentication:
- Use encryption (e.g., AES) to protect data.
- Authenticate nodes to prevent rogue devices.
- Example: Each drone possesses a unique cryptographic key for secure joining.
-
Optimize Power Consumption:
- Implement duty cycling where radios sleep when idle.
- Dynamically adjust transmission power based on distance.
- Example: A drone reduces radio power when neighbors are nearby to save battery.
-
Test and Validate in Simulation and Real-World:
- Use network simulators like NS-3 or OMNeT++ to model mesh behavior.
- Deploy small-scale drone swarm tests to validate.
Mind Map: Routing Algorithm Selection Criteria
Example: Implementing a Mesh Network with ESP32 Drones
- Hardware: ESP32 development boards with Wi-Fi and Bluetooth
- Protocol: ESP-MESH (based on IEEE 802.11s)
- Routing: Built-in self-healing and dynamic routing
Scenario:
- A swarm of 10 drones equipped with ESP32 modules forms a mesh network.
- Each drone periodically broadcasts status and sensor data.
- If one drone moves out of range or fails, the network automatically reroutes messages through alternative drones.
Outcome:
- Continuous data flow with minimal packet loss.
- Network adapts dynamically to topology changes.
Troubleshooting Tips
- Issue: Frequent disconnections
- Check radio interference and adjust channels.
- Optimize transmission power.
- Issue: High latency
- Simplify routing paths.
- Reduce network size or segment into subnetworks.
- Issue: Excessive power consumption
- Implement sleep modes.
- Optimize beacon intervals.
Summary
Designing a reliable mesh network for drone swarms involves careful selection of hardware, protocols, and routing algorithms, combined with strategies for power management and security. By leveraging self-healing, decentralized communication, and adaptive routing, drone swarms can maintain robust connectivity even in dynamic and challenging environments.
This best practice ensures that swarm coordination, data sharing, and mission execution remain uninterrupted, enabling advanced autonomous capabilities.
5.5 Example: Real-Time Data Fusion in Multi-Robot Systems
Real-time data fusion in multi-robot systems is a critical capability that enables autonomous swarms to operate cohesively, make informed decisions, and adapt dynamically to their environment. By combining sensory data from multiple robots, the swarm can achieve a more accurate, robust, and comprehensive understanding of the environment than any single robot could alone.
What is Real-Time Data Fusion?
Data fusion is the process of integrating information from multiple sources to produce more consistent, accurate, and useful information than that provided by any individual data source. In multi-robot systems, this involves combining sensor data streams from different robots to create a unified situational awareness.
Key objectives include:
- Reducing uncertainty and noise
- Enhancing spatial and temporal resolution
- Improving fault tolerance
Why is Data Fusion Important in Swarm Robotics?
- Distributed Sensing: Each robot has limited sensing capabilities; fusion aggregates these to cover larger areas.
- Redundancy: Multiple robots sensing the same phenomenon increase reliability.
- Collaborative Decision Making: Shared data enables coordinated actions.
Mind Map: Components of Real-Time Data Fusion in Multi-Robot Systems
Example Scenario: Environmental Monitoring with Drone Swarm
Imagine a swarm of drones deployed to monitor air quality over a large urban area. Each drone is equipped with gas sensors, GPS, and cameras. The goal is to create a real-time pollution map.
Step 1: Individual Data Collection
- Each drone collects local sensor readings (e.g., CO2 levels, particulate matter).
- GPS data provides location context.
Step 2: Data Preprocessing
- Noise filtering using sensor-specific filters.
- Timestamp synchronization for temporal alignment.
Step 3: Data Sharing and Communication
- Drones communicate via a wireless mesh network.
- Data packets are broadcasted periodically.
Step 4: Data Fusion Algorithm
- A distributed Kalman filter is implemented where each drone fuses its own data with neighbors’ data.
- This results in a refined estimate of pollution levels at each location.
Step 5: Map Generation and Update
- Fused data is used to update a shared pollution heatmap.
- The map is continuously refined as drones move and collect more data.
Mind Map: Data Fusion Workflow in Drone Swarm
Practical Implementation: Distributed Kalman Filter Example
Kalman Filter Basics:
- Predicts the state of a system over time.
- Updates predictions with new measurements.
Distributed Setup:
- Each robot maintains its own Kalman filter.
- Robots exchange state estimates and covariance matrices.
- Fusion is done by weighted averaging based on uncertainty.
Example Code Snippet (Python-like pseudocode):
class Robot:
def __init__(self, id):
self.id = id
self.state_estimate = initial_state
self.covariance = initial_covariance
def predict(self):
# Predict next state
self.state_estimate = A @ self.state_estimate + B @ control_input
self.covariance = A @ self.covariance @ A.T + process_noise
def update(self, measurement):
# Kalman gain
K = self.covariance @ H.T @ np.linalg.inv(H @ self.covariance @ H.T + measurement_noise)
# Update estimate
self.state_estimate = self.state_estimate + K @ (measurement - H @ self.state_estimate)
# Update covariance
self.covariance = (np.eye(len(K)) - K @ H) @ self.covariance
def fuse_with_neighbor(self, neighbor_state, neighbor_cov):
# Weighted average fusion
inv_cov_sum = np.linalg.inv(self.covariance) + np.linalg.inv(neighbor_cov)
fused_cov = np.linalg.inv(inv_cov_sum)
fused_state = fused_cov @ (np.linalg.inv(self.covariance) @ self.state_estimate + np.linalg.inv(neighbor_cov) @ neighbor_state)
self.state_estimate = fused_state
self.covariance = fused_cov
Challenges and Best Practices
Summary
Real-time data fusion in multi-robot systems enhances the swarm’s ability to perceive and react to complex environments. By leveraging distributed algorithms like the Kalman filter and robust communication protocols, autonomous swarms can achieve reliable, accurate, and scalable collective intelligence.
This example of environmental monitoring with drones illustrates how fusion techniques can be practically applied, providing robotics engineers and control engineers with a blueprint for designing effective multi-robot data integration systems.
6. Localization and Mapping in Swarm Environments
6.1 Techniques for Individual and Collective Localization
Localization is a fundamental capability for autonomous swarm systems, enabling each robot or drone to understand its position within an environment. Accurate localization is critical for navigation, coordination, and task execution. In swarm robotics, localization techniques can be categorized into individual localization—where each agent determines its own position independently—and collective localization, where agents collaborate to improve positional accuracy.
Individual Localization Techniques
Individual localization relies on sensors and algorithms onboard each robot to estimate its position without direct input from peers.
-
GPS-Based Localization
- Widely used for outdoor environments.
- Provides absolute global position.
- Limitations: signal loss indoors or in dense urban areas.
-
Inertial Measurement Unit (IMU) Integration
- Uses accelerometers and gyroscopes to estimate movement.
- Useful for dead reckoning when GPS is unavailable.
- Drift accumulates over time, requiring corrections.
-
Visual Odometry
- Uses camera data to estimate motion by tracking visual features.
- Effective in GPS-denied environments.
- Computationally intensive; sensitive to lighting and texture.
-
Lidar-Based Localization
- Uses laser scans to match surroundings with known maps.
- Provides precise relative positioning.
- Requires pre-existing maps or simultaneous mapping.
-
Ultrasonic and Infrared Sensors
- Short-range distance measurements for obstacle detection and relative positioning.
- Limited range and accuracy.
Example: Individual Localization in a Drone
A drone flying outdoors primarily uses GPS for global positioning. When flying under tree cover or near buildings where GPS signals degrade, it switches to visual odometry combined with IMU data to maintain accurate localization. This hybrid approach ensures continuous position estimation.
Collective Localization Techniques
Collective localization leverages communication and sensor data sharing among swarm members to improve accuracy and robustness.
-
Relative Positioning via Inter-Robot Ranging
- Robots measure distances or angles to neighbors using radio signals (e.g., UWB), ultrasonic, or infrared.
- Enables building a relative map of the swarm.
-
Cooperative SLAM (Simultaneous Localization and Mapping)
- Swarm members share sensor data to collaboratively build and update a map while localizing themselves.
- Improves map accuracy and reduces individual computational load.
-
Consensus-Based Localization
- Robots iteratively share and update their position estimates to converge on a consistent global state.
- Useful in GPS-denied or dynamic environments.
-
Beacon-Based Localization
- Fixed or mobile beacons with known positions assist swarm members in localizing themselves.
- Can be deployed temporarily in mission areas.
Example: Collective Localization in Ground Robot Swarm
In an indoor warehouse, a swarm of ground robots uses Ultra-Wideband (UWB) radios to measure distances between each other. By sharing these measurements and applying consensus algorithms, the swarm collectively estimates each robot’s position relative to the warehouse map, compensating for GPS absence.
Mind Map: Localization Techniques Overview
Mind Map: Collective Localization Workflow
Best Practice: Combining Individual and Collective Localization
For robust swarm operation, engineers should design systems that blend individual and collective localization methods. For example, drones can use GPS when available but fall back on cooperative SLAM and inter-drone ranging when GPS signals are weak or lost. This hybrid approach enhances reliability and accuracy.
Summary
- Individual localization provides each robot with autonomous position awareness but can be limited by sensor errors or environmental constraints.
- Collective localization exploits swarm communication and cooperation to improve positional accuracy and robustness.
- Combining both approaches is often necessary for real-world swarm deployments.
By understanding and implementing these localization techniques, swarm robotics engineers can enable precise navigation and coordination essential for complex autonomous missions.
6.2 Simultaneous Localization and Mapping (SLAM) in Swarms
Simultaneous Localization and Mapping (SLAM) is a foundational technique in robotics that enables robots to build a map of an unknown environment while simultaneously keeping track of their own location within it. When applied to swarms, SLAM becomes a collaborative process where multiple robots share information to create a comprehensive and accurate map more efficiently than any single robot could achieve alone.
Why SLAM is Critical in Swarm Robotics
- Distributed Exploration: Multiple agents can cover larger areas faster.
- Robustness: Redundancy in sensing and mapping reduces the impact of individual robot failures.
- Improved Accuracy: Combining data from multiple perspectives enhances map quality.
- Scalability: Collaborative SLAM scales with the number of robots.
Core Components of SLAM in Swarms
Mind Map: SLAM in Swarms Overview
Approaches to SLAM in Swarm Robotics
-
Centralized SLAM: All robots send sensor data to a central node that processes and fuses the data.
- Example: A drone swarm sends LIDAR scans to a base station which builds a global map.
- Best Practice: Use centralized SLAM when communication bandwidth is high and latency is low.
-
Decentralized (Distributed) SLAM: Each robot processes its own data and shares summarized information with neighbors.
- Example: Ground robots exchange pose graphs to merge local maps.
- Best Practice: Employ decentralized SLAM in communication-constrained or large-scale swarms.
-
Hybrid SLAM: Combines centralized and decentralized elements, e.g., local map building with periodic global fusion.
Mind Map: SLAM Architectures
Example: Cooperative SLAM with TurtleBot Swarm
Scenario: A team of TurtleBot robots explores an indoor environment to build a shared map.
- Each TurtleBot runs a local SLAM algorithm (e.g., GMapping).
- Robots broadcast their pose graphs and keyframe data to neighbors.
- Using graph-based SLAM techniques, robots merge local maps into a consistent global map.
- Loop closures detected by one robot can be propagated to others to improve map accuracy.
Best Practice: Use pose graph optimization libraries like g2o or Ceres for efficient map fusion.
Mind Map: Cooperative SLAM Workflow
Challenges and Solutions in Swarm SLAM
| Challenge | Description | Solution / Best Practice |
|---|---|---|
| Communication Constraints | Limited bandwidth and intermittent connectivity | Use compressed map representations and event-triggered updates |
| Data Association Ambiguities | Matching features across different robots’ observations | Employ robust feature descriptors and probabilistic data association methods |
| Scalability | Increasing number of robots increases computational load | Use distributed optimization and hierarchical map fusion |
| Dynamic Environments | Changing environments cause map inconsistencies | Incorporate dynamic object filtering and adaptive mapping |
Example: SLAM in Drone Swarms for Environmental Monitoring
- Multiple drones equipped with RGB-D cameras perform aerial mapping of a forest.
- Each drone runs onboard visual SLAM to localize and map.
- Drones share compressed point clouds and pose estimates over a mesh network.
- A decentralized SLAM algorithm merges data to build a high-resolution 3D map.
Best Practice: Use lightweight visual SLAM algorithms like ORB-SLAM2 optimized for embedded platforms.
Summary
SLAM in swarms leverages the power of multiple autonomous agents working collaboratively to localize themselves and map unknown environments efficiently and robustly. By choosing appropriate architectures—centralized, decentralized, or hybrid—and employing best practices such as graph optimization, robust data association, and communication-efficient data sharing, swarm engineers can build scalable and resilient mapping systems that enable complex collective tasks.
Further Reading and Tools
- ROS Packages:
rtabmap_ros,cartographer - Graph Optimization Libraries: g2o, Ceres Solver
- Research Papers: “Distributed Multi-Robot SLAM: A Review and Future Directions” (2020)
- Simulation: Gazebo with multi-robot SLAM scenarios
6.3 Handling Dynamic and Unknown Environments
Autonomous swarms often operate in environments that are both dynamic and unknown. These conditions pose significant challenges because the swarm must adapt in real-time to changes such as moving obstacles, varying terrain, and unpredictable events without prior knowledge of the environment. Effective handling of such environments is critical for applications like search and rescue, environmental monitoring, and exploration.
Key Challenges in Dynamic and Unknown Environments
- Unpredictable Obstacles: Moving objects or changes in terrain that can interfere with navigation.
- Limited Sensing: Individual robots may have limited sensor range and accuracy.
- Communication Constraints: Dynamic environments can disrupt communication links.
- Real-Time Adaptation: The swarm must quickly update plans and behaviors.
Strategies for Handling Dynamic and Unknown Environments
- Decentralized Sensing and Decision-Making: Each robot uses local sensing and processing to react quickly.
- Collaborative Mapping and Sharing: Robots share information to build a collective understanding.
- Robust Path Planning: Algorithms that can replan paths dynamically when obstacles appear.
- Behavioral Adaptation: Switching between behaviors like exploration, obstacle avoidance, or regrouping.
- Fault Tolerance: Handling robot failures or communication dropouts gracefully.
Mind Map: Handling Dynamic and Unknown Environments
Example 1: Cooperative Exploration with Dynamic Obstacle Avoidance
In a scenario where a swarm of ground robots explores a collapsed building, the environment is unknown and constantly changing due to unstable debris. Each robot is equipped with LIDAR and ultrasonic sensors to detect obstacles locally. Robots share detected obstacles and map updates via a mesh network.
- Approach: Robots use a decentralized SLAM algorithm to build a shared map.
- Dynamic Obstacle Handling: When a robot detects a new obstacle blocking its path, it locally replans its route using a Rapidly-exploring Random Tree (RRT) algorithm.
- Collective Adaptation: Robots communicate changes so others can update their paths, avoiding bottlenecks.
This approach ensures continuous exploration despite environmental changes.
Mind Map: Cooperative Exploration Example
Example 2: Drone Swarm for Agricultural Monitoring
A drone swarm monitors a large agricultural field where weather conditions and obstacles such as moving farm vehicles introduce dynamic elements.
- Approach: Drones use GPS and onboard cameras for localization and environment perception.
- Dynamic Adaptation: When a drone detects a moving vehicle, it adjusts its flight path locally and informs neighbors.
- Collaborative Mapping: Drones share crop health data and obstacle locations to optimize coverage.
This enables efficient monitoring with minimal human intervention.
Mind Map: Agricultural Monitoring Example
Best Practices Summary
- Use decentralized algorithms to enable quick local reactions.
- Implement collaborative mapping to maintain an updated global picture.
- Incorporate robust path planning that supports real-time replanning.
- Design communication protocols that tolerate intermittent connectivity.
- Test extensively in simulation with dynamic scenarios before deployment.
Handling dynamic and unknown environments is a cornerstone capability for autonomous swarms. By combining decentralized sensing, collaborative mapping, adaptive control, and robust communication, swarm systems can achieve resilient and effective operation even in the most challenging conditions.
6.4 Best Practice: Cooperative SLAM Implementation with Example Robots
Cooperative SLAM (Simultaneous Localization and Mapping) is a powerful technique that enables multiple robots in a swarm to collaboratively build a map of an unknown environment while simultaneously localizing themselves within it. This approach leverages the collective sensing and computational power of the swarm, resulting in faster, more accurate, and robust mapping compared to single-robot SLAM.
Why Cooperative SLAM?
- Improved Coverage: Multiple robots can explore different areas simultaneously, reducing the time to map large environments.
- Robustness: If one robot fails or loses localization, others can compensate.
- Data Fusion: Combining sensor data from multiple sources improves map accuracy.
Key Components of Cooperative SLAM
Step-by-Step Implementation Guide
-
Individual Robot SLAM Setup:
- Equip each robot with sensors such as LIDAR, RGB-D cameras, or ultrasonic sensors.
- Implement a standard SLAM algorithm (e.g., GMapping, Hector SLAM, ORB-SLAM) on each robot.
-
Relative Pose Estimation Between Robots:
- Use inter-robot observations (e.g., visual markers, UWB ranging) to estimate relative positions.
- Example: Two ground robots detect each other using AprilTags and estimate relative pose.
-
Data Sharing Protocol:
- Establish a communication network (Wi-Fi, mesh network) for exchanging map data and pose information.
- Use efficient data compression and synchronization techniques to handle bandwidth constraints.
-
Map Merging and Optimization:
- Fuse individual maps into a global map using graph-based optimization methods.
- Detect loop closures both within a robot’s trajectory and across different robots.
-
Collaborative Exploration Strategy:
- Assign exploration goals dynamically to maximize coverage and minimize overlap.
- Example: One drone explores upper floors while ground robots map corridors.
Example: Cooperative SLAM with TurtleBot3 Robots
Setup:
- Three TurtleBot3 robots equipped with LIDAR and onboard computers.
- ROS (Robot Operating System) framework with the
rtabmap_rospackage for SLAM. - Wi-Fi network for communication.
Implementation Highlights:
- Each TurtleBot3 runs RTAB-Map locally to generate individual maps.
- Robots broadcast their pose and map updates over ROS topics.
- A centralized node merges maps using graph optimization.
- Robots use AprilTags to detect each other and improve relative localization.
Outcome:
- The swarm successfully maps a multi-room indoor environment in half the time compared to a single robot.
- The global map is more consistent and accurate due to shared loop closure information.
Mind Map: Cooperative SLAM Workflow
Practical Tips and Best Practices
- Synchronize Clocks: Ensure all robots have synchronized time to accurately merge data.
- Bandwidth Management: Compress map data and limit update frequency to avoid network congestion.
- Robust Relative Localization: Use multiple modalities (vision, UWB, IMU) to improve inter-robot pose accuracy.
- Failure Handling: Design fallback strategies if communication is lost (e.g., revert to individual SLAM).
- Simulation First: Test cooperative SLAM algorithms in simulators like Gazebo before real-world deployment.
Additional Example: Drone Swarm Cooperative SLAM
- Multiple quadrotors equipped with RGB-D cameras explore a forested area.
- Use visual-inertial odometry onboard each drone.
- Share sparse feature maps over a mesh network.
- Merge maps at a base station for a comprehensive 3D reconstruction.
This approach enables rapid environmental mapping for applications like search and rescue or environmental monitoring.
Summary
Cooperative SLAM is a cornerstone technique for autonomous swarm robotics, enabling efficient and accurate mapping through collaboration. By combining individual SLAM capabilities with robust communication and coordination strategies, robot swarms can tackle complex mapping tasks that are infeasible for single robots.
Implementing cooperative SLAM requires careful attention to sensor integration, relative localization, data fusion, and network management. Leveraging open-source tools and real-world examples like TurtleBot3 swarms can accelerate development and deployment.
References & Resources:
- ROS RTAB-Map Documentation: http://wiki.ros.org/rtabmap_ros
- AprilTags Visual Fiducials: https://april.eecs.umich.edu/software/apriltag
- Survey on Cooperative SLAM: https://ieeexplore.ieee.org/document/xxxxxxx
- TurtleBot3 Platform: https://emanual.robotis.com/docs/en/platform/turtlebot3/
6.5 Case Study: Swarm-Based Environmental Monitoring with Distributed Mapping
Environmental monitoring is a critical application area where autonomous swarms can provide significant advantages. By leveraging distributed mapping techniques, swarms of drones or ground robots can collaboratively explore, map, and monitor large or complex environments efficiently and robustly.
Overview
In this case study, we explore how a swarm of autonomous drones is deployed to monitor a forest ecosystem for parameters such as vegetation health, temperature variations, and pollutant levels. The drones use distributed SLAM (Simultaneous Localization and Mapping) to build a collective map of the environment while sharing data in real-time to optimize coverage and accuracy.
Key Objectives
- Efficient area coverage: Maximize spatial coverage with minimal overlap.
- Accurate environmental mapping: Combine sensor data to create detailed maps.
- Robustness: Handle individual drone failures without compromising mission.
- Real-time data sharing: Enable swarm-wide situational awareness.
System Architecture
- Robots: Quadrotor drones equipped with RGB cameras, LiDAR, temperature and gas sensors.
- Communication: Mesh network using Wi-Fi for data exchange.
- Localization: GPS-denied environment; drones rely on onboard LiDAR-based SLAM.
- Mapping: Each drone builds a local map; maps are merged using distributed consensus.
Distributed Mapping Workflow
Best Practices Illustrated
Cooperative SLAM Implementation
- Each drone runs a LiDAR-based SLAM algorithm locally to estimate its pose and build a local map.
- Periodically, drones exchange map fragments and pose estimates with neighbors.
- A distributed consensus algorithm merges overlapping maps, resolving inconsistencies.
Example: Drone A and Drone B overlap in a forest clearing. They exchange local maps and align them using feature matching, then update their global map estimates accordingly.
Robust Communication and Data Sharing
- Use of a mesh network ensures multi-hop communication even if some drones lose direct links.
- Data compression techniques reduce bandwidth usage.
Example: When Drone C moves out of range of the base station, it routes data through Drone D to maintain connectivity.
Adaptive Coverage Planning
- The environment is partitioned dynamically based on current swarm distribution and map completeness.
- Drones reassign themselves to unexplored or under-monitored zones.
Example: If Drone E detects an area with sparse data, it signals nearby drones to assist in coverage.
Example Scenario
- Deployment: Ten drones are launched at the forest perimeter.
- Exploration: Each drone starts mapping its assigned sector using onboard sensors.
- Data Exchange: Every 5 minutes, drones share map updates with neighbors.
- Map Fusion: Using distributed consensus, drones merge local maps into a consistent global map.
- Environmental Data Overlay: Sensor readings (temperature, gas concentration) are geotagged and integrated into the map.
- Adaptive Re-tasking: Drones detect gaps or anomalies and adjust flight paths collaboratively.
- Mission Completion: After full coverage, the swarm returns with a comprehensive environmental map.
Mind Map: Environmental Monitoring Swarm Components
Lessons Learned
- Distributed mapping enhances robustness: No single point of failure; drones compensate for one another.
- Communication is critical: Reliable mesh networks enable real-time collaboration.
- Dynamic task allocation improves efficiency: Swarm adapts to environmental changes and sensor data quality.
- Sensor fusion enriches environmental insights: Combining multiple sensor modalities yields richer maps.
Summary
This case study demonstrates how distributed mapping empowers autonomous swarms to perform complex environmental monitoring tasks effectively. By integrating best practices such as cooperative SLAM, robust communication, and adaptive coverage planning, swarm systems can deliver scalable, resilient, and detailed environmental data collection solutions.
Further Reading & Tools
- ROS (Robot Operating System) packages:
rtabmap_rosfor distributed SLAM - Simulation: Gazebo with multi-robot plugins
- Algorithms: Distributed consensus algorithms (e.g., average consensus, max-consensus)
- Research papers: “Distributed SLAM for Multi-Robot Systems” by Michael Milford et al.
Closing Example
Imagine a swarm of 15 drones autonomously monitoring a wildfire-prone forest. As fire hotspots emerge, the swarm dynamically reallocates drones to map smoke density and temperature gradients, providing firefighters with real-time actionable maps — all enabled by distributed mapping and collective intelligence.
7. Path Planning and Navigation Strategies
7.1 Global vs Local Path Planning in Swarm Contexts
Path planning is a critical aspect of autonomous swarm robotics, enabling individual agents to navigate safely and efficiently while contributing to the collective mission. In swarm contexts, path planning can be broadly categorized into global and local approaches. Understanding the distinctions, advantages, and challenges of each is essential for designing effective swarm navigation systems.
Global Path Planning
Global path planning involves computing a complete path from the start to the goal location using a known or partially known map of the environment. It typically assumes access to a global representation of the workspace, allowing for optimized route planning.
Key Characteristics:
- Requires a map or environmental model.
- Plans entire path before execution.
- Optimizes for shortest distance, energy efficiency, or time.
- Often centralized or shared among swarm members.
Common Algorithms:
- A* (A-star)
- Dijkstra’s Algorithm
- Probabilistic Roadmaps (PRM)
- Rapidly-exploring Random Trees (RRT)
Example: Consider a swarm of drones tasked with inspecting a large agricultural field. Using satellite imagery or pre-mapped data, a global planner computes optimal routes for each drone to cover distinct sections without overlap, minimizing total flight time.
Local Path Planning
Local path planning focuses on real-time navigation based on immediate sensor data and environmental feedback. It enables agents to react dynamically to obstacles, other agents, and changing conditions without relying on a complete map.
Key Characteristics:
- Uses onboard sensors (e.g., LIDAR, cameras).
- Reacts to dynamic obstacles and changes.
- Typically decentralized and reactive.
- Supports collision avoidance and short-term goal adjustments.
Common Algorithms:
- Potential Fields
- Dynamic Window Approach (DWA)
- Vector Field Histogram (VFH)
- Bug Algorithms
Example: A swarm of ground robots exploring an unknown disaster site uses local path planning to avoid rubble and moving debris, adjusting paths on-the-fly while collectively covering the area.
Integrating Global and Local Planning in Swarms
In practice, effective swarm navigation often combines both global and local planning:
- Global planner provides a high-level route or waypoints.
- Local planner handles obstacle avoidance and fine adjustments.
This hybrid approach balances efficiency and adaptability.
Mind Map: Path Planning in Swarm Robotics
Example Scenario: Warehouse Robot Swarm
Context: A swarm of robots navigates a warehouse to pick and deliver items.
- Global Planning: The system computes optimized routes for each robot to reach assigned shelves, minimizing travel distance and avoiding congestion zones.
- Local Planning: Robots use onboard sensors to avoid unexpected obstacles like humans or misplaced boxes.
Best Practice: Implement a layered control system where a centralized global planner assigns tasks and routes, while decentralized local planners ensure real-time safety and adaptability.
Best Practice Tips for Engineers
- Map Accuracy: Ensure global maps are updated frequently to reflect environmental changes.
- Sensor Fusion: Combine multiple sensor inputs for robust local obstacle detection.
- Communication: Share local obstacle information among swarm members to update global plans dynamically.
- Scalability: Design local planners to operate independently to avoid communication bottlenecks.
Summary
Global and local path planning serve complementary roles in swarm robotics. Global planning offers strategic route optimization, while local planning ensures tactical responsiveness. By integrating both, engineers can build swarms capable of efficient, safe, and adaptive navigation in complex environments.
7.2 Collision Avoidance Techniques for Dense Swarms
Collision avoidance is a critical challenge in dense swarm robotics, where multiple autonomous agents operate in close proximity. Effective collision avoidance ensures swarm integrity, safety, and mission success. This section explores key techniques, supported by easy-to-understand examples and mind maps to visualize concepts.
Key Collision Avoidance Techniques
- Reactive Methods: Agents respond immediately to nearby obstacles or neighbors using local sensing.
- Predictive Methods: Agents predict future trajectories of neighbors and adjust paths proactively.
- Behavior-Based Approaches: Combining multiple simple behaviors (e.g., separation, alignment) to maintain safe distances.
- Optimization-Based Methods: Using mathematical optimization to compute collision-free trajectories.
- Communication-Aided Avoidance: Sharing position and intent information to coordinate movements.
Mind Map: Collision Avoidance Techniques Overview
Reactive Methods
Reactive methods rely on immediate sensor data to avoid collisions without complex planning.
Example:
- Potential Fields: Each robot is repelled by nearby obstacles and neighbors, creating a “force field” that pushes it away from collisions.
Example in Practice:
- A drone swarm uses ultrasonic sensors to detect neighbors within 1 meter and applies repulsive forces to maintain spacing.
Mind Map: Reactive Methods
Predictive Methods
These methods forecast future positions of neighbors to avoid collisions before they occur.
Example:
- Velocity Obstacles (VO): Each robot calculates forbidden velocity vectors that would lead to collisions and selects safe velocities.
Example in Practice:
- Ground robots in a warehouse predict paths of nearby robots to avoid bottlenecks and collisions.
Mind Map: Predictive Methods
Behavior-Based Approaches
Inspired by natural swarms, these use simple rules to maintain safe distances and coordinated movement.
Example:
- Separation Rule: Each agent steers to avoid crowding neighbors.
- Flocking Algorithms: Combine separation, alignment, and cohesion to navigate safely.
Example in Practice:
- A swarm of small robots uses the Boids algorithm to maintain formation while avoiding collisions.
Mind Map: Behavior-Based Approaches
Optimization-Based Methods
These methods formulate collision avoidance as an optimization problem, balancing objectives like path efficiency and safety.
Example:
- Model Predictive Control (MPC): Robots solve an optimization problem at each timestep to find collision-free trajectories.
Example in Practice:
- Autonomous delivery robots in a dense urban environment use MPC to navigate crowded sidewalks.
Mind Map: Optimization-Based Methods
Communication-Aided Avoidance
Sharing information among swarm members enhances collision avoidance by improving situational awareness.
Example:
- Robots broadcast their positions and intended paths to neighbors, allowing coordinated maneuvers.
Example in Practice:
- A drone swarm performing a light show shares flight plans to avoid mid-air collisions.
Mind Map: Communication-Aided Avoidance
Integrated Example: Collision Avoidance in a Dense Drone Swarm
Consider a swarm of 50 drones performing an indoor inspection task in a cluttered warehouse:
- Each drone uses ultrasonic sensors (Reactive) to detect immediate obstacles.
- They run a velocity obstacle algorithm (Predictive) to anticipate collisions 2 seconds ahead.
- The swarm implements separation and alignment behaviors (Behavior-Based) to maintain formation.
- Drones solve a simplified MPC problem (Optimization-Based) every 0.5 seconds to optimize paths.
- They broadcast their positions and velocities every 100 ms (Communication-Aided) to neighbors within 10 meters.
This multi-layered approach ensures robust collision avoidance even in dense, dynamic environments.
Summary
Collision avoidance in dense swarms is best addressed by combining multiple techniques tailored to the application and hardware capabilities. Reactive methods provide fast responses, predictive and optimization methods enhance planning, behavior-based approaches offer simplicity and scalability, and communication improves coordination.
By integrating these techniques, engineers can design swarms that operate safely and efficiently in complex, crowded environments.
7.3 Adaptive Navigation in Dynamic Environments
Adaptive navigation refers to the capability of autonomous swarm agents—drones or robots—to dynamically adjust their paths and behaviors in response to changes in their environment. Dynamic environments are characterized by moving obstacles, changing terrain, unpredictable events, and evolving mission goals. Effective adaptive navigation ensures swarm robustness, safety, and mission success.
Key Concepts in Adaptive Navigation
- Real-time Sensing and Perception: Continuous environmental monitoring to detect changes.
- Dynamic Path Replanning: Updating routes on-the-fly based on new information.
- Obstacle Avoidance: Reactive behaviors to prevent collisions with moving or static obstacles.
- Behavioral Flexibility: Switching between navigation strategies depending on context.
- Communication and Coordination: Sharing environmental updates across swarm members.
Mind Map: Components of Adaptive Navigation
Mind Map: Challenges in Dynamic Environments
Example 1: Reactive Obstacle Avoidance in a Drone Swarm
Consider a drone swarm tasked with inspecting a construction site where cranes and vehicles move unpredictably. Each drone is equipped with ultrasonic sensors and cameras to detect obstacles within a 5-meter radius.
- Implementation: Each drone continuously scans for obstacles and uses a reactive obstacle avoidance algorithm (e.g., Dynamic Window Approach).
- Adaptation: When an obstacle is detected, the drone calculates a safe detour path locally without waiting for centralized commands.
- Swarm Coordination: Drones share obstacle locations via a mesh network to update their maps.
Outcome: The swarm dynamically adjusts flight paths, avoiding collisions and maintaining inspection coverage.
Mind Map: Reactive Obstacle Avoidance Workflow
Example 2: Dynamic Path Replanning Using A* with Real-Time Updates
In a warehouse, a swarm of ground robots transports goods. The environment is dynamic with forklifts and human workers moving unpredictably.
- Implementation: Robots initially plan paths using A* algorithm on a static map.
- Adaptation: When a robot detects a blocked path or moving obstacle, it triggers a local replanning event.
- Coordination: Robots broadcast blocked zones to neighbors to avoid congestion.
Outcome: Robots efficiently reroute around obstacles, minimizing delays and collisions.
Mind Map: Dynamic Path Replanning Process
Best Practices for Adaptive Navigation
- Multi-Sensor Fusion: Combine data from multiple sensors to improve environmental awareness.
- Hierarchical Planning: Use global planners for mission goals and local planners for immediate obstacle avoidance.
- Robust Communication: Implement low-latency, reliable communication protocols for timely data sharing.
- Incremental Map Updates: Continuously update environmental maps rather than rebuilding from scratch.
- Simulation Testing: Validate adaptive algorithms in simulated dynamic scenarios before deployment.
Summary
Adaptive navigation in dynamic environments is critical for autonomous swarm success. By integrating real-time sensing, dynamic replanning, reactive obstacle avoidance, and effective communication, swarms can navigate complex, changing spaces safely and efficiently. Practical implementations, such as reactive obstacle avoidance in drone swarms and dynamic replanning in warehouse robots, demonstrate these principles in action.
For further reading, explore algorithms like Dynamic Window Approach, D* Lite, and Reinforcement Learning-based navigation methods tailored for swarm robotics.
7.4 Best Practice: Implementing Potential Fields for Swarm Navigation
Potential fields is a widely used technique in swarm robotics and autonomous navigation to enable robots or drones to navigate through complex environments while avoiding obstacles and maintaining cohesion with the swarm. This approach models the environment as a field of forces where goals attract the agents and obstacles repel them, allowing decentralized, smooth, and reactive navigation.
What are Potential Fields?
- Attractive Potential: Pulls the robot towards a goal or waypoint.
- Repulsive Potential: Pushes the robot away from obstacles or other agents to avoid collisions.
The robot’s movement is determined by the vector sum of these forces.
Why Use Potential Fields in Swarm Navigation?
- Decentralized Control: Each agent computes forces locally.
- Scalability: Works well with large numbers of agents.
- Smooth Trajectories: Avoids abrupt movements.
- Real-Time Adaptability: Reacts instantly to dynamic obstacles.
Mind Map: Core Concepts of Potential Fields
Step-by-Step Implementation Guide
- Define the Goal Position: Each agent has a target coordinate it needs to reach.
- Calculate Attractive Force: Use a function proportional to the distance from the agent to the goal.
- Detect Obstacles and Agents: Use onboard sensors or communication to identify nearby obstacles and swarm members.
- Calculate Repulsive Forces: For each detected obstacle or agent within an influence radius, compute a repulsive vector inversely proportional to the distance.
- Sum Forces: Combine all attractive and repulsive vectors to get the resultant force.
- Update Velocity and Position: Move the agent in the direction of the resultant force, respecting maximum speed constraints.
- Iterate Continuously: Repeat the process to adapt to dynamic changes.
Mind Map: Implementation Workflow
Example: Simple 2D Potential Field Navigation for a Drone Swarm
import numpy as np
class Drone:
def __init__(self, position, goal):
self.position = np.array(position, dtype=float)
self.goal = np.array(goal, dtype=float)
self.max_speed = 1.0
self.attractive_gain = 1.5
self.repulsive_gain = 2.0
self.influence_radius = 5.0
def attractive_force(self):
direction = self.goal - self.position
distance = np.linalg.norm(direction)
if distance == 0:
return np.zeros(2)
force = self.attractive_gain * direction / distance
return force
def repulsive_force(self, obstacles):
force = np.zeros(2)
for obs in obstacles:
direction = self.position - obs
distance = np.linalg.norm(direction)
if distance < self.influence_radius and distance > 0:
repulse = self.repulsive_gain * (1.0/distance - 1.0/self.influence_radius) / (distance**2) * (direction / distance)
force += repulse
return force
def update(self, obstacles):
f_attr = self.attractive_force()
f_rep = self.repulsive_force(obstacles)
total_force = f_attr + f_rep
speed = np.linalg.norm(total_force)
if speed > self.max_speed:
total_force = (total_force / speed) * self.max_speed
self.position += total_force
# Example usage
obstacles = [np.array([5,5]), np.array([3,4])]
drone = Drone(position=[0,0], goal=[10,10])
for step in range(20):
drone.update(obstacles)
print(f"Step {step+1}: Position {drone.position}")
This example shows a single drone navigating towards a goal while avoiding two obstacles using potential fields.
Mind Map: Example Breakdown
Tips and Best Practices
- Tune Gains Carefully: Too high repulsive gain causes oscillations; too low causes collisions.
- Set Appropriate Influence Radius: Balances responsiveness and computational load.
- Combine with Other Methods: Use potential fields alongside path planning algorithms to avoid local minima.
- Implement Velocity Smoothing: To prevent jittery movements.
- Test in Simulation First: Validate behavior in controlled environments.
Real-World Example: Warehouse Robot Swarm
In a warehouse, a swarm of robots uses potential fields to navigate aisles and shelves. Each robot is attracted to its assigned pickup or drop-off point and repelled by obstacles such as shelves, other robots, and humans. This decentralized approach enables smooth traffic flow without collisions, even in tight spaces.
Summary
Potential fields offer an intuitive and effective method for swarm navigation by modeling attractive and repulsive forces. When implemented with careful parameter tuning and combined with other control strategies, they enable autonomous swarms to navigate complex environments efficiently and safely.
7.5 Example: Multi-Agent Pathfinding in Warehouse Automation
Multi-agent pathfinding (MAPF) is a critical component in warehouse automation where fleets of autonomous robots coordinate to move goods efficiently without collisions or bottlenecks. This section explores how MAPF is engineered in warehouse environments, highlighting best practices and providing clear examples.
Understanding Multi-Agent Pathfinding (MAPF)
MAPF involves planning paths for multiple agents (robots) from their start locations to goal destinations such that no two agents collide and the overall operation is optimized for time or energy.
Key Challenges:
- Avoiding collisions in tight spaces
- Minimizing delays and deadlocks
- Scalability with increasing robot numbers
- Dynamic replanning due to environment changes
Mind Map: Core Components of MAPF in Warehouse Automation
Example Scenario: Coordinated Robot Fleet in a Warehouse
Imagine a warehouse with 10 autonomous mobile robots tasked with picking items from shelves and delivering them to packing stations. The warehouse layout consists of narrow aisles and multiple intersections.
Step 1: Environment Modeling
- Represent the warehouse as a grid graph where nodes are positions robots can occupy.
- Edges represent possible movements (up, down, left, right).
Step 2: Assign Start and Goal Positions
- Each robot has a unique start node (current location).
- Each robot has a goal node (item pickup or delivery point).
Step 3: Path Planning Algorithm
- Use a centralized algorithm like Conflict-Based Search (CBS) to find collision-free paths.
Step 4: Execution and Monitoring
- Robots follow planned paths.
- Real-time monitoring detects deviations or obstacles.
- Dynamic replanning triggered if unexpected obstacles appear.
Mind Map: Conflict-Based Search (CBS) Algorithm Overview
Best Practice: Implementing MAPF with CBS in Warehouse Robots
- Step 1: Model warehouse as a graph with nodes and edges.
- Step 2: Define start and goal nodes for each robot.
- Step 3: Run CBS to generate collision-free paths.
- Step 4: Deploy paths to robots with synchronized clocks to maintain temporal coordination.
- Step 5: Continuously monitor robot positions and trigger replanning when necessary.
Example Code Snippet (Pseudocode):
# Pseudocode for CBS-based MAPF
initialize constraint_tree with root node (no constraints)
while constraint_tree not empty:
node = pop node with lowest cost
paths = find_paths_for_all_agents(node.constraints)
conflict = detect_conflict(paths)
if no conflict:
return paths # solution found
else:
for agent in conflict.agents:
new_constraints = add_constraint(agent, conflict)
new_node = create_node_with_constraints(node, new_constraints)
push new_node into constraint_tree
Real-World Example: Amazon Robotics Warehouse
Amazon uses fleets of Kiva robots to automate warehouse logistics. These robots rely on sophisticated MAPF algorithms to navigate crowded warehouse floors efficiently.
- Robots communicate their positions and planned paths.
- Centralized controllers optimize paths to avoid collisions.
- Dynamic replanning allows robots to adapt to human workers or unexpected obstacles.
Summary
Multi-agent pathfinding is essential for efficient warehouse automation with autonomous robot fleets. By leveraging algorithms like CBS, engineers can ensure collision-free, optimized navigation. Best practices include accurate environment modeling, synchronized execution, and dynamic replanning.
This approach not only improves throughput but also enhances safety and scalability in complex warehouse environments.
8. Machine Learning and AI in Autonomous Swarms
8.1 Leveraging Reinforcement Learning for Adaptive Behaviors
Reinforcement Learning (RL) is a powerful paradigm in machine learning where agents learn to make decisions by interacting with their environment to maximize cumulative rewards. In the context of autonomous swarms, RL enables individual robots or drones to adapt their behaviors dynamically based on experience, leading to improved collective performance without explicit programming of every scenario.
Why Reinforcement Learning for Swarms?
- Adaptability: Swarm members can adjust to changing environments and tasks.
- Scalability: RL algorithms can be decentralized, allowing each agent to learn independently or collaboratively.
- Emergent Cooperation: Through reward structures, agents learn cooperative behaviors that enhance swarm efficiency.
Mind Map: Reinforcement Learning in Autonomous Swarms
Key Concepts Explained with Examples
Agent and Environment
Each drone or robot in the swarm acts as an RL agent. The environment includes the physical space, obstacles, other agents, and task-specific elements.
Example: A drone navigating a forest to find survivors after a disaster.
States and Actions
States represent the agent’s perception of the environment (e.g., position, velocity, nearby obstacles). Actions are possible moves or commands (e.g., move forward, turn left).
Example: A ground robot’s state could include distance to nearest obstacle; actions might be ‘move forward’, ‘turn right’.
Rewards
Rewards guide learning by reinforcing desirable behaviors.
Example: Positive reward for approaching a target area; negative reward for collisions.
Example 1: Q-Learning for Collision Avoidance in Drone Swarms
- Scenario: Each drone learns to avoid collisions while maintaining formation.
- Approach:
- States: Relative distance to neighbors and obstacles.
- Actions: Adjust velocity vector (e.g., speed up, slow down, turn).
- Rewards: +10 for maintaining safe distance, -20 for collisions.
- Outcome: Over time, drones learn policies to keep formation without collisions.
Mind Map: Q-Learning Workflow in Swarm Agents
Example 2: Multi-Agent Reinforcement Learning (MARL) for Cooperative Object Transport
- Scenario: A group of robots cooperatively transport a heavy object.
- Approach:
- Agents learn policies that coordinate pushing and navigating obstacles.
- Shared reward based on progress and stability of the object.
- Outcome: Robots develop synchronized behaviors without explicit coordination commands.
Best Practices for Applying RL in Swarm Robotics
- Start with Simulation: Use simulators (e.g., Gazebo, Webots) to train agents safely.
- Reward Shaping: Design rewards carefully to encourage cooperation and avoid unintended behaviors.
- Decentralized Learning: Prefer decentralized or federated learning to reduce communication overhead.
- Curriculum Learning: Gradually increase task complexity to improve learning stability.
- Hybrid Approaches: Combine RL with classical control for safety-critical tasks.
Mind Map: Best Practices for RL in Swarms
Summary
Leveraging reinforcement learning in autonomous swarms empowers individual agents to adapt and optimize their behaviors in complex, dynamic environments. Through examples like collision avoidance and cooperative transport, RL demonstrates its potential to unlock emergent, intelligent swarm behaviors. By following best practices such as simulation-based training and reward shaping, engineers can effectively harness RL to build robust, adaptive swarm systems.
8.2 Swarm Behavior Optimization Using Evolutionary Algorithms
Swarm robotics relies heavily on the collective behavior of multiple agents working together to achieve complex tasks. Optimizing these behaviors to improve efficiency, robustness, and adaptability is a critical challenge. Evolutionary algorithms (EAs) provide a powerful framework for optimizing swarm behaviors by mimicking natural selection and evolution principles.
What Are Evolutionary Algorithms?
Evolutionary algorithms are a subset of bio-inspired optimization techniques that use mechanisms such as selection, mutation, crossover, and reproduction to evolve solutions over generations. They are particularly well-suited for problems where the search space is large, complex, or poorly understood.
Why Use Evolutionary Algorithms for Swarm Behavior?
- Adaptability: EAs can evolve behaviors that adapt to changing environments.
- Scalability: They optimize decentralized control rules suitable for large swarms.
- Robustness: Evolved behaviors often tolerate individual robot failures.
- No Need for Explicit Models: EAs optimize behaviors without requiring explicit mathematical models.
Key Concepts in Swarm Behavior Optimization
Step-by-Step Example: Evolving Foraging Behavior in a Robot Swarm
Objective: Optimize simple behavioral rules so that a swarm of robots efficiently collects and returns objects to a home base.
-
Behavior Encoding:
- Each robot’s behavior is encoded as a chromosome, e.g., parameters controlling movement speed, turning angles, and response thresholds.
-
Initial Population:
- Generate a population of random behavior sets.
-
Simulation and Fitness Evaluation:
- Simulate the swarm performing the foraging task.
- Fitness is measured by the total number of objects collected within a time frame.
-
Selection:
- Select the best-performing behavior sets using tournament selection.
-
Genetic Operators:
- Apply crossover and mutation to create new behavior sets.
-
Iteration:
- Repeat simulation, evaluation, and selection over multiple generations.
-
Result:
- The evolved behaviors show emergent cooperation, such as efficient area exploration and collision avoidance.
Example Mind Map: Foraging Behavior Evolution
Practical Best Practices
- Define Clear Fitness Functions: Fitness functions should balance task performance and swarm safety (e.g., penalize collisions).
- Use Simulations for Evaluation: Real-world testing is costly; use high-fidelity simulations for rapid iteration.
- Encourage Behavioral Diversity: Prevent premature convergence by maintaining diverse candidate behaviors.
- Hybrid Approaches: Combine EAs with other learning methods (e.g., reinforcement learning) for enhanced performance.
- Incremental Complexity: Start evolving simple behaviors before moving to complex multi-objective tasks.
Real-World Case Study: Evolution of Formation Control
Researchers applied genetic algorithms to evolve control parameters for a swarm of drones to maintain dynamic formations under wind disturbances. The evolved controllers outperformed manually designed ones by adapting to environmental changes and maintaining formation integrity.
Summary
Evolutionary algorithms offer a flexible and powerful approach to optimize swarm behaviors by evolving decentralized control rules. Through iterative simulation and selection, swarms can develop robust, efficient, and adaptive behaviors suitable for complex real-world applications.
Further Reading
- “Swarm Intelligence: From Natural to Artificial Systems” by Eric Bonabeau et al.
- “Evolutionary Robotics: The Biology, Intelligence, and Technology of Self-Organizing Machines” by Stefano Nolfi and Dario Floreano
- Research papers on genetic algorithms applied to swarm robotics in IEEE Xplore
8.3 Real-Time Decision Making with Onboard AI
Real-time decision making is a cornerstone of autonomous swarm robotics, enabling individual agents to respond swiftly and effectively to dynamic environments without relying on centralized control. Onboard AI empowers each robot or drone to process sensor data, interpret environmental cues, and make autonomous decisions that contribute to the collective mission.
Key Components of Real-Time Decision Making with Onboard AI
How Onboard AI Enables Real-Time Decisions
- Sensor Data Acquisition: Robots collect raw data from onboard sensors.
- Data Preprocessing: Filtering and fusing sensor data to create a coherent environmental model.
- Inference: AI algorithms analyze processed data to infer the best course of action.
- Action Execution: Control systems translate AI decisions into motor commands or communication signals.
- Continuous Feedback: The system monitors outcomes and adapts behavior dynamically.
Example 1: Collision Avoidance in Drone Swarms
A drone swarm navigating an urban environment must avoid obstacles and each other in real time. Each drone uses onboard AI to:
- Process LIDAR and camera data to detect obstacles.
- Predict trajectories of nearby drones using neural networks.
- Decide on evasive maneuvers using reinforcement learning policies.
- Execute smooth velocity adjustments to maintain formation and avoid collisions.
Example 2: Dynamic Task Allocation in Ground Robot Swarms
In a warehouse, a swarm of ground robots must dynamically allocate tasks such as picking, delivery, and charging. Onboard AI enables:
- Real-time assessment of battery levels and task priorities.
- Communication with neighbors to negotiate task assignments.
- Decision trees to select tasks based on current state and swarm needs.
- Autonomous rerouting to optimize efficiency.
Best Practices for Implementing Onboard AI in Real-Time Decision Making
- Optimize for Low Latency: Use lightweight AI models or hardware accelerators (e.g., edge TPUs) to ensure decisions are made within milliseconds.
- Robust Sensor Fusion: Combine multiple sensor modalities to improve reliability and reduce false positives.
- Incremental Learning: Allow AI models to adapt over time with online learning techniques to handle evolving environments.
- Fail-Safe Mechanisms: Implement fallback behaviors when AI outputs are uncertain or sensors fail.
- Simulation Before Deployment: Test AI decision-making extensively in simulated environments to identify edge cases.
Summary
Real-time decision making with onboard AI transforms individual swarm agents into intelligent, autonomous units capable of complex behaviors without centralized oversight. By integrating sensor data processing, AI inference, and control execution in a continuous loop, swarms achieve agility, robustness, and scalability essential for real-world applications.
8.4 Best Practice: Training a Drone Swarm for Cooperative Object Transport
Cooperative object transport is a challenging yet highly impactful application of drone swarms, where multiple drones work together to carry and maneuver objects that are too heavy or bulky for a single drone. This section covers best practices for training such swarms, integrating control strategies, communication protocols, and machine learning techniques to achieve efficient and reliable cooperative transport.
Key Components of Cooperative Object Transport
Step 1: Define the Task and Constraints
- Object Characteristics: Weight, shape, fragility.
- Drone Capabilities: Payload capacity, battery life, sensor suite.
- Environment: Indoor/outdoor, obstacles, wind conditions.
Example: Transporting a 2 kg rectangular box across a 50-meter outdoor field with moderate wind.
Step 2: Select Appropriate Control Architecture
- Leader-Follower: One drone leads, others follow maintaining formation.
- Consensus-Based: All drones share information to agree on movement.
- Behavior-Based: Each drone follows simple rules leading to emergent cooperation.
Example: Use consensus-based control to dynamically adjust load sharing when one drone’s battery is low.
Step 3: Design Communication Protocols
- Reliable, low-latency communication is critical.
- Use mesh networking to ensure redundancy.
- Implement heartbeat signals to detect failures.
Example: Drones exchange position and force sensor data every 100 ms to maintain balanced load.
Step 4: Implement Machine Learning for Adaptive Coordination
- Reinforcement Learning (RL): Train drones to optimize grip force and flight paths.
- Multi-Agent RL: Enables drones to learn cooperative strategies.
- Imitation Learning: Use expert demonstrations to bootstrap training.
Example: Train a swarm in simulation to adjust formation dynamically when encountering wind gusts.
Step 5: Simulation and Iterative Testing
- Use physics-based simulators (e.g., Gazebo, AirSim).
- Model payload dynamics and drone interactions.
- Test failure scenarios (e.g., drone dropout).
Example: Simulate object slipping scenarios and train drones to react by adjusting grip and position.
Step 6: Real-World Deployment and Fine-Tuning
- Start with small payloads and simple maneuvers.
- Gradually increase complexity and object weight.
- Monitor performance metrics: transport time, energy consumption, object stability.
Example: Deploy a 4-drone swarm to transport a box indoors, adjusting grip force based on sensor feedback.
Example Workflow: Training a Drone Swarm for Cooperative Object Transport
Practical Example: Multi-Agent Reinforcement Learning for Box Transport
- Environment: Simulated 3D space with physics engine.
- Agents: Four drones equipped with force sensors.
- State Space: Positions, velocities, grip forces, relative distances.
- Actions: Adjust thrust, grip force, relative position.
- Reward Function: Minimize transport time, avoid object slip, maintain formation.
Outcome: After training, the swarm adapts to wind disturbances and uneven load distribution, successfully transporting the object with minimal oscillation.
Tips and Best Practices
- Start Simple: Begin with two drones and light payloads.
- Use Modular Code: Separate control, communication, and learning modules.
- Incorporate Redundancy: Design fault-tolerant communication and control.
- Leverage Simulation: Extensively test before real-world deployment.
- Continuous Learning: Enable online adaptation for changing environments.
Summary
Training a drone swarm for cooperative object transport requires an integrated approach combining control theory, communication protocols, and machine learning. By following a structured workflow—from task definition through simulation to deployment—and leveraging adaptive algorithms, engineers can build robust swarms capable of complex collaborative tasks.
For further reading, explore:
- “Multi-Agent Reinforcement Learning for Cooperative Transport” (Research Paper)
- Open-source frameworks like OpenAI Gym for multi-agent environments
- Simulation tools: Gazebo, AirSim
8.5 Case Study: Using Deep Learning for Swarm Obstacle Detection
Introduction
Obstacle detection is a critical capability for autonomous swarms, enabling drones or robots to navigate complex environments safely and efficiently. Deep learning techniques, particularly convolutional neural networks (CNNs), have revolutionized perception systems by providing robust, real-time object recognition and segmentation.
This case study explores how deep learning can be integrated into swarm robotics for obstacle detection, highlighting architecture design, training strategies, deployment considerations, and practical examples.
Mind Map: Deep Learning for Swarm Obstacle Detection
Step 1: Data Collection and Preparation
For effective obstacle detection, the swarm requires a rich dataset representing the operational environment. This includes:
- Visual Data: RGB images or video streams captured by onboard cameras.
- Depth Data: From stereo cameras or depth sensors to understand spatial relationships.
- LIDAR Scans: For precise distance measurements.
Example: A drone swarm operating in a forest collects thousands of images under varying lighting and weather conditions. Obstacles include trees, branches, rocks, and humans.
Data annotation tools like LabelImg or CVAT are used to label obstacles with bounding boxes or segmentation masks.
Step 2: Model Selection and Architecture
Given the constraints of swarm agents (limited compute and power), lightweight deep learning models are preferred.
Example Architectures:
- Tiny YOLOv4: Real-time object detection with reduced parameters.
- MobileNet SSD: Efficient for embedded devices.
- Custom CNNs: Tailored for specific obstacle classes.
Mind Map: Model Architecture Choices
Step 3: Training and Optimization
Training involves:
- Transfer Learning: Starting from pretrained weights on large datasets (e.g., COCO) and fine-tuning on domain-specific data.
- Data Augmentation: Techniques like rotation, scaling, brightness changes to increase dataset diversity.
- Domain Adaptation: To handle differences between simulated and real-world data.
Example: Using synthetic data generated from simulation environments to supplement real-world images, then fine-tuning the model on actual drone footage.
Step 4: Deployment on Swarm Agents
Models are deployed on embedded platforms such as NVIDIA Jetson Nano, Google Coral, or Raspberry Pi with accelerators.
Best Practices:
- Quantize models to reduce size and improve inference speed.
- Use batch normalization folding and pruning.
- Optimize inference pipelines with frameworks like TensorRT or OpenVINO.
Example: A drone running a quantized Tiny YOLOv4 model achieves 15 FPS obstacle detection with 85% mAP in forest environments.
Step 5: Integration with Swarm Control Systems
Obstacle detection outputs feed into the swarm’s navigation and control algorithms:
- Local Avoidance: Each agent uses detected obstacles to adjust its path.
- Map Sharing: Agents communicate detected obstacles to build a collective map.
- Adaptive Planning: The swarm dynamically reroutes to avoid congested or hazardous areas.
Mind Map: Integration with Swarm Control
Practical Example: Drone Swarm in Urban Search and Rescue
Scenario: A swarm of drones is deployed in a collapsed building to locate survivors. The environment is cluttered with debris and unstable structures.
- Each drone runs a lightweight CNN model trained to detect rubble, walls, and human shapes.
- Detected obstacles are shared wirelessly to create a 3D obstacle map.
- The swarm coordinates to cover the area efficiently, avoiding collisions.
Outcome: The deep learning-based obstacle detection enables drones to navigate safely, improving mission success and reducing risk.
Summary
Deep learning significantly enhances obstacle detection in autonomous swarms by enabling robust, real-time perception. By carefully selecting models, training with diverse data, optimizing for embedded deployment, and integrating with swarm control, engineers can build swarms capable of navigating complex environments autonomously.
This case study demonstrates the practical steps and best practices to harness deep learning for obstacle detection, empowering swarm robotics applications across domains.
9. Simulation and Testing of Swarm Systems
9.1 Importance of Simulation in Swarm Robotics Development
Simulation plays a pivotal role in the development, testing, and deployment of swarm robotics systems. Given the complexity, scale, and unpredictability inherent in autonomous swarms, simulation environments offer a controlled, cost-effective, and scalable platform to design, validate, and optimize swarm behaviors before real-world implementation.
Why Simulation is Crucial in Swarm Robotics
- Cost Efficiency: Building and deploying large numbers of physical robots or drones for testing can be prohibitively expensive. Simulation reduces hardware costs by enabling virtual experimentation.
- Risk Mitigation: Testing new algorithms or behaviors in the real world can lead to damage or loss of robots. Simulation provides a safe environment to identify and fix issues.
- Scalability: Simulating hundreds or thousands of agents is feasible, whereas physical testing at such scale is challenging.
- Rapid Iteration: Developers can quickly modify parameters, algorithms, or environmental conditions and observe outcomes instantly.
- Complex Scenario Testing: Simulations can model diverse and extreme environments that might be difficult or dangerous to replicate physically.
Key Benefits of Simulation in Swarm Robotics
- Behavior Validation: Ensures that individual and collective behaviors align with design goals.
- Algorithm Tuning: Helps optimize control, communication, and coordination algorithms.
- Performance Metrics Collection: Enables detailed logging and analysis of swarm performance.
- Integration Testing: Allows testing of hardware-software integration virtually.
Mind Map: Importance of Simulation in Swarm Robotics
Example 1: Testing Flocking Behavior in Simulation
Imagine a swarm of 50 drones designed to perform flocking — maintaining formation while navigating an environment. Testing this directly with physical drones is costly and risky. Instead, a simulation platform like Gazebo or Webots can model the drones and environment, allowing engineers to:
- Adjust parameters such as separation distance, alignment strength, and cohesion.
- Observe emergent flocking patterns.
- Identify and resolve collision issues.
- Experiment with varying obstacle densities.
This iterative process ensures that the flocking algorithm is robust before physical deployment.
Example 2: Simulating Communication Failures
In real-world swarm deployments, communication can be unreliable due to interference or hardware faults. Simulations can emulate:
- Packet loss
- Latency
- Network partitioning
By introducing these faults in simulation, engineers can test fault-tolerant algorithms and ensure the swarm maintains coordination despite communication challenges.
Mind Map: Simulation Use Cases in Swarm Robotics
Best Practices for Effective Simulation
- Model Fidelity: Balance between simulation detail and computational efficiency.
- Incremental Complexity: Start with simple scenarios and gradually add complexity.
- Realistic Noise and Uncertainty: Incorporate sensor noise, actuator errors, and environmental variability.
- Validation with Physical Tests: Regularly compare simulation results with real-world experiments to ensure accuracy.
Summary
Simulation is an indispensable tool in swarm robotics development, enabling engineers to design, test, and optimize complex multi-agent systems efficiently and safely. By leveraging simulation, teams can accelerate innovation, reduce costs, and improve the reliability of autonomous swarms before real-world deployment.
9.2 Popular Simulation Tools and Frameworks
Simulation plays a pivotal role in the development, testing, and validation of autonomous swarm systems. It allows engineers and researchers to model complex interactions, evaluate algorithms, and identify potential issues before deploying physical robots or drones. This section explores some of the most widely used simulation tools and frameworks tailored for swarm robotics, highlighting their features, strengths, and practical examples.
Key Criteria for Selecting Simulation Tools
- Scalability: Ability to simulate large numbers of agents efficiently.
- Realism: Accurate physics and sensor modeling.
- Extensibility: Support for custom behaviors and algorithms.
- Visualization: Clear and interactive interfaces for monitoring swarm behavior.
- Integration: Compatibility with common robotics middleware (e.g., ROS).
Popular Simulation Tools and Frameworks
Mind Map: Popular Swarm Robotics Simulation Tools
Gazebo
Gazebo is one of the most popular open-source 3D robotics simulators. It provides a robust physics engine, realistic sensor simulation, and seamless integration with ROS (Robot Operating System).
- Best for: High-fidelity simulations involving drones and ground robots.
- Example: Simulating a swarm of quadcopters performing formation flying.
Example snippet:
# Launch a multi-drone simulation in Gazebo with ROS
roslaunch multi_drone_simulation swarm.launch
Gazebo’s plugin system allows customization of robot behaviors and sensors, making it ideal for testing swarm coordination algorithms.
Webots
Webots is a professional mobile robot simulation software that supports multi-robot scenarios out of the box.
- Best for: Rapid prototyping with a rich library of robot models.
- Example: Programming a swarm of robots to cooperatively transport an object.
Example: Using Webots’ Supervisor node to coordinate swarm tasks.
ARGoS
ARGoS (Autonomous Robots Go Swarming) is specifically designed for large-scale swarm robotics simulations. It supports parallel execution and modular physics engines.
- Best for: Simulating thousands of simple robots efficiently.
- Example: Implementing flocking behavior with hundreds of robots.
Example mind map:
V-REP (CoppeliaSim)
V-REP, now known as CoppeliaSim, is a versatile robot simulator with extensive scripting capabilities.
- Best for: Complex multi-robot scenarios requiring advanced control.
- Example: Coordinated path planning for warehouse robots.
Stage
Stage is a 2D robot simulator optimized for large numbers of robots with simplified physics.
- Best for: Fast prototyping of swarm algorithms where 3D physics is not critical.
- Example: Simulating search and rescue swarm behaviors in a 2D map.
MORSE
MORSE is a Python-based simulator focusing on realistic sensor data and integration with ROS.
- Best for: Environmental monitoring applications and sensor-rich robots.
- Example: Simulating a swarm of robots collecting environmental data.
Integrated Example: Using Gazebo and ROS for Drone Swarm Simulation
This approach allows robotics engineers to test control strategies in a realistic environment before real-world deployment.
Summary Table
| Simulator | Type | Strengths | Example Use Case |
|---|---|---|---|
| Gazebo | 3D | High-fidelity physics, ROS | Drone formation flying |
| Webots | 3D | Rich robot library, cross-platform | Cooperative transport |
| ARGoS | 2D/3D | Large-scale swarms, parallelism | Flocking with hundreds of robots |
| CoppeliaSim | 3D | Advanced scripting, versatile | Warehouse multi-robot planning |
| Stage | 2D | Lightweight, fast | Search and rescue simulations |
| MORSE | 3D | Realistic sensors, Python-based | Environmental monitoring |
By leveraging these simulation tools, swarm robotics engineers can accelerate development cycles, reduce costs, and improve the robustness of their autonomous systems.
9.3 Designing Realistic Test Scenarios and Metrics
Designing realistic test scenarios and defining appropriate metrics are critical steps in validating the performance, robustness, and scalability of autonomous swarm systems. Without carefully crafted scenarios and measurable criteria, it becomes difficult to assess whether the swarm behaves as intended in real-world conditions.
Key Considerations for Designing Test Scenarios
- Realism: The scenario should closely mimic the operational environment where the swarm will be deployed, including terrain, obstacles, communication constraints, and dynamic elements.
- Scalability: Test scenarios must evaluate how the swarm performs as the number of agents increases or decreases.
- Diversity: Include a variety of conditions such as different lighting, weather, or interference to test robustness.
- Complexity: Gradually increase task complexity to understand swarm limits.
- Repeatability: Scenarios should be reproducible to allow consistent benchmarking.
Mind Map: Designing Realistic Test Scenarios
Metrics for Evaluating Swarm Performance
-
Task Efficiency: Measures how quickly and effectively the swarm completes its assigned task.
- Example: Time taken for a drone swarm to map a predefined area.
-
Scalability: Assesses performance changes as the number of agents varies.
- Example: Comparing coverage percentage with 5 vs 20 robots.
-
Robustness and Fault Tolerance: Evaluates how well the swarm handles agent failures or communication loss.
- Example: Percentage of task completion when 10% of robots fail mid-mission.
-
Energy Consumption: Tracks power usage to estimate operational endurance.
- Example: Average battery drain per robot during a 30-minute mission.
-
Communication Overhead: Measures bandwidth usage and message frequency.
- Example: Number of messages exchanged per minute in a mesh network.
-
Collision Rate: Counts incidents of collisions or near misses.
- Example: Number of collisions per 100 meters traveled.
-
Coverage and Exploration: Quantifies area or volume explored or monitored.
- Example: Percentage of a disaster zone scanned by the swarm.
Mind Map: Metrics for Swarm Evaluation
Example Scenario: Search and Rescue Drone Swarm
-
Scenario Description: A swarm of 15 drones is tasked with locating survivors in a simulated disaster area with collapsed structures and smoke.
-
Test Elements:
- Obstacles: Rubble piles and smoke zones reducing visibility.
- Communication: Intermittent signal loss due to interference.
- Dynamic Events: Random ‘survivor’ signals appearing at different locations.
-
Metrics Measured:
- Time to locate all survivors.
- Number of drones lost or disabled.
- Communication message loss rate.
- Energy consumption per drone.
-
Best Practice: Run multiple trials with varying numbers of drones (10, 15, 20) to evaluate scalability and robustness.
Example Scenario: Warehouse Inventory Robot Swarm
-
Scenario Description: A heterogeneous swarm of 10 ground robots navigates aisles to scan and update inventory data.
-
Test Elements:
- Environment: Narrow aisles with dynamic obstacles (human workers).
- Task: Complete inventory scan within a fixed time window.
- Communication: Wi-Fi network with potential congestion.
-
Metrics Measured:
- Percentage of inventory scanned.
- Number of collisions or near misses.
- Task completion time.
- Communication overhead.
-
Best Practice: Introduce random obstacle movement and evaluate swarm’s adaptive navigation and collision avoidance.
Summary
Designing realistic test scenarios involves creating environments and tasks that closely reflect the intended use cases of the swarm while incorporating variability and complexity. Selecting meaningful metrics aligned with mission goals enables quantitative evaluation of swarm performance. Together, these practices ensure that autonomous swarm systems are rigorously validated before real-world deployment.
9.4 Best Practice: Creating a Scalable Simulation Environment for Drone Swarms
Creating a scalable simulation environment for drone swarms is essential for testing algorithms, control strategies, and communication protocols before deploying them on real hardware. A well-designed simulation environment allows engineers to iterate rapidly, identify potential issues, and optimize swarm behaviors under various conditions.
Key Considerations for Scalable Drone Swarm Simulations
- Modularity: Design the simulation architecture in modular components (e.g., physics engine, communication, control algorithms) to enable easy updates and extensions.
- Realism vs Performance: Balance between physical realism (accurate aerodynamics, sensor noise) and computational efficiency to support large swarm sizes.
- Distributed Simulation: Support distributed computing or cloud-based simulation to handle hundreds or thousands of agents.
- Visualization and Debugging: Provide intuitive visualization tools and debugging interfaces to monitor swarm behavior.
- Reproducibility: Ensure simulations are deterministic or support seed-based randomization for reproducible experiments.
Mind Map: Components of a Scalable Drone Swarm Simulation
Example: Building a Scalable Simulation Using ROS and Gazebo
Step 1: Modular Setup
- Use ROS (Robot Operating System) for modular node-based architecture.
- Each drone is represented as a ROS node running flight control and swarm logic.
- Gazebo provides the physics simulation and 3D visualization.
Step 2: Simplify Physics for Scale
- Use simplified aerodynamic models to reduce computational load.
- Disable unnecessary physics features (e.g., detailed rotor dynamics) for large swarms.
Step 3: Communication Simulation
- Implement a ROS topic-based communication with simulated packet loss and latency.
- Use namespaces to isolate communication channels per drone.
Step 4: Distributed Execution
- Run subsets of drones on different machines connected via ROS multi-master or ROS2 DDS.
- Synchronize simulation time across machines.
Step 5: Visualization and Monitoring
- Use Gazebo’s multi-camera views and RViz for state visualization.
- Log swarm metrics such as formation accuracy, collision counts, and communication delays.
Mind Map: Workflow for Scalable Drone Swarm Simulation Development
Practical Example: Simulating a 100-Drone Formation Flight
- Scenario: Maintain a V-formation while navigating through an obstacle field.
- Approach:
- Use simplified quadrotor models with basic PID flight controllers.
- Implement local communication with limited range to simulate realistic radio constraints.
- Use a decentralized consensus algorithm for formation maintenance.
- Run simulation distributed across 4 machines, each handling 25 drones.
- Visualize in Gazebo with real-time performance metrics.
Outcome:
- Able to detect formation breakups due to communication loss.
- Identify bottlenecks in collision avoidance algorithms.
- Optimize communication parameters to improve robustness.
Tips for Success
- Start with small swarm sizes and gradually scale up.
- Profile simulation performance to identify and optimize bottlenecks.
- Use seed-based randomness to reproduce and debug issues.
- Incorporate real sensor noise models for realistic testing.
- Leverage cloud computing platforms for large-scale simulations.
By following these best practices and leveraging modular, distributed simulation architectures, engineers can create scalable and effective simulation environments that accelerate the development and deployment of autonomous drone swarms.
9.5 Example: Transitioning from Simulation to Real-World Deployment
Transitioning autonomous swarm systems from simulation environments to real-world deployment is a critical phase in swarm robotics engineering. This process involves validating simulated behaviors under real-world constraints, adapting to unforeseen environmental factors, and ensuring robustness and safety. Below, we explore a detailed example of this transition, supported by mind maps and practical insights.
Understanding the Transition Process
Step 1: Validate Simulation Models Against Real Data
Before deployment, ensure that the simulation models accurately reflect real-world dynamics. For example, if simulating a drone swarm, validate the flight dynamics, sensor noise models, and communication delays against data collected from prototype drones.
Example:
- Use recorded IMU and GPS data from test flights to calibrate the simulation’s sensor noise parameters.
- Adjust aerodynamic models to account for wind disturbances observed in outdoor tests.
Step 2: Hardware-in-the-Loop (HIL) Testing
Integrate real hardware components with the simulation to test control algorithms under realistic conditions.
Example:
- Connect the swarm’s flight controller hardware to a simulation environment where sensor inputs are simulated, but control outputs are executed on actual hardware.
- This helps identify timing issues, hardware constraints, and unexpected behaviors before full deployment.
Step 3: Incremental Real-World Testing
Deploy the swarm in controlled real-world environments, gradually increasing complexity.
Example:
- Start with a small number of drones performing simple tasks indoors.
- Progress to outdoor flights with limited obstacles.
- Finally, test full swarm operations in complex, dynamic environments.
Step 4: Robustness and Safety Enhancements
Real-world environments introduce uncertainties that require robust algorithms and fail-safe mechanisms.
Example:
- Implement fallback behaviors such as safe landing or return-to-home when communication is lost.
- Use redundancy in sensors and communication channels to mitigate failures.
Mind Map: Incremental Testing Workflow
Example Case: Deploying a Drone Swarm for Environmental Monitoring
Simulation Phase:
- Developed a swarm of 10 drones in Gazebo simulator with ROS integration.
- Simulated tasks included area coverage, obstacle avoidance, and data relay.
Transition Steps:
- Calibrated sensor noise and flight dynamics using data from a single prototype drone.
- Performed HIL testing with flight controllers connected to the simulation.
- Conducted indoor flights with 3 drones to validate formation control.
- Moved to outdoor testing with 5 drones in a fenced area, introducing wind and GPS noise.
- Implemented fail-safe routines triggered by communication loss.
- Full deployment with 10 drones covering a forested area for real-time environmental data collection.
Outcomes:
- Identified discrepancies in obstacle detection due to sensor limitations.
- Updated simulation models to include sensor occlusion effects.
- Improved communication protocols to handle intermittent connectivity.
Key Takeaways
- Simulation is a foundation, not a guarantee: Real-world testing uncovers issues simulations cannot predict.
- Iterative refinement is essential: Use real data to improve models and algorithms continuously.
- Safety first: Always design with fail-safes and gradual scaling in mind.
- Documentation and monitoring: Maintain detailed logs and telemetry to analyze real-world performance.
By following these structured steps and leveraging both simulation and real-world testing, engineers can effectively bridge the gap between virtual swarm behaviors and reliable autonomous swarm deployments.
10. Safety, Ethics, and Regulatory Considerations
10.1 Ensuring Safe Operation in Autonomous Swarms
Ensuring the safe operation of autonomous swarms is critical to their successful deployment in real-world environments. Safety encompasses not only the physical integrity of individual robots and drones but also the protection of humans, infrastructure, and the environment. This section explores best practices, methodologies, and practical examples to design and maintain safe swarm systems.
Key Safety Considerations in Autonomous Swarms
- Collision avoidance (inter-robot and with obstacles)
- Fault detection and recovery
- Communication reliability and security
- Environmental awareness and adaptation
- Fail-safe and emergency protocols
Mind Map: Core Components of Safe Swarm Operation
Collision Avoidance: Best Practices & Example
Best Practice: Implement multi-layered collision avoidance combining local sensing with predictive algorithms.
Example: In a drone swarm used for aerial inspection, each drone is equipped with ultrasonic sensors for immediate obstacle detection and uses a shared map updated in real-time to predict potential collisions. When two drones approach dangerously close, a priority-based maneuvering protocol ensures one yields by adjusting altitude or path.
Fault Detection and Recovery
Best Practice: Continuous health monitoring of swarm members with automated fault isolation and reconfiguration.
Example: A ground robot swarm performing warehouse inventory uses onboard diagnostics to detect motor failures. Upon detection, the faulty robot broadcasts a status message, and the swarm dynamically reallocates tasks to maintain coverage without human intervention.
Communication Reliability and Security
Best Practice: Use encrypted communication channels with acknowledgment protocols and fallback routing to prevent data loss or malicious interference.
Example: In a search and rescue swarm, drones use a mesh network with encrypted packets. If a node fails or is jammed, the network reroutes messages through alternate drones, maintaining command and control integrity.
Environmental Awareness and Adaptation
Best Practice: Integrate multi-modal sensors and adaptive algorithms to respond safely to changing environments.
Example: Agricultural robot swarms adjust their speed and formation when encountering wet or uneven terrain, detected via onboard cameras and inertial measurement units (IMUs), reducing the risk of tipping or damage.
Fail-Safe and Emergency Protocols
Best Practice: Design emergency stop and safe landing protocols that can be triggered autonomously or by remote operators.
Example: A drone swarm conducting urban surveillance includes an emergency landing protocol activated if communication is lost for more than 5 seconds. Drones autonomously find the nearest safe landing zone, minimizing risk to people and property.
Mind Map: Emergency Response Workflow in Swarm Systems
Summary
Safe operation in autonomous swarms requires a holistic approach that integrates sensing, communication, control, and emergency management. By applying layered safety mechanisms and learning from practical examples, engineers can design swarm systems that operate reliably and safely even in complex, dynamic environments.
10.2 Ethical Implications of Autonomous Collective Systems
Autonomous collective systems, such as drone swarms and robot collectives, bring transformative capabilities but also raise complex ethical questions. Understanding these ethical implications is essential for engineers, researchers, and stakeholders to ensure responsible design, deployment, and operation.
Key Ethical Considerations
-
Accountability & Responsibility
- Who is responsible when a swarm causes harm?
- Challenges in attributing fault in decentralized systems.
-
Privacy
- Surveillance capabilities of swarms can infringe on individual privacy.
- Data collection and usage ethics.
-
Safety & Risk
- Ensuring swarms operate safely around humans and property.
- Managing failure modes and unintended consequences.
-
Autonomy & Control
- Balancing autonomous decision-making with human oversight.
- Ethical limits on autonomous actions.
-
Bias & Fairness
- Avoiding algorithmic biases that could lead to unfair treatment.
- Ensuring equitable deployment and access.
-
Environmental Impact
- Effects of swarm operations on wildlife and ecosystems.
Mind Map: Ethical Dimensions of Autonomous Swarms
Example 1: Accountability in Disaster Response Drone Swarms
Imagine a swarm of drones deployed for search and rescue after an earthquake. If a drone malfunctions and causes injury or property damage, determining liability is challenging because:
- The swarm operates with decentralized control.
- Multiple organizations may be involved in deployment and maintenance.
Best Practice: Establish clear operational protocols and legal agreements before deployment. Incorporate logging and traceability in swarm software to track decision-making paths.
Mind Map: Accountability Challenges
Example 2: Privacy Concerns with Surveillance Swarms
Swarm drones used for urban monitoring can collect vast amounts of data, including images and audio, potentially infringing on citizens’ privacy.
Best Practice: Implement privacy-by-design principles:
- Limit data collection to necessary information.
- Anonymize data where possible.
- Provide transparency and obtain consent when feasible.
Mind Map: Privacy Considerations
Example 3: Safety and Risk Management in Agricultural Robot Swarms
In precision farming, swarms of robots may operate near humans and livestock. Risks include accidental collisions or chemical exposure.
Best Practice: Integrate multi-layered safety systems:
- Real-time obstacle detection.
- Emergency stop protocols.
- Regular maintenance and health monitoring.
Mind Map: Safety & Risk Mitigation
Broader Ethical Frameworks to Consider
- Principle of Beneficence: Ensure swarms contribute positively to society.
- Principle of Non-Maleficence: Avoid harm to humans, animals, and environment.
- Justice: Fair distribution of benefits and risks.
- Respect for Autonomy: Maintain human control and informed consent.
Summary
Ethical implications of autonomous collective systems are multifaceted and require proactive consideration throughout the engineering lifecycle. By embedding ethical best practices—such as accountability mechanisms, privacy safeguards, safety protocols, and fairness assessments—engineers can help ensure these powerful technologies serve society responsibly and sustainably.
10.3 Navigating Legal and Regulatory Frameworks for Drones and Robots
Engineering autonomous swarms, especially those involving drones and robots, requires a deep understanding of the legal and regulatory landscape. Compliance is not only essential to avoid penalties but also to ensure safety, privacy, and public trust. This section explores key legal frameworks, common regulations, and practical examples to help engineers navigate this complex environment.
Key Legal and Regulatory Areas for Autonomous Swarms
Airspace Regulations
Most countries regulate drone flights to ensure safe integration with manned aircraft. For example, in the United States, the Federal Aviation Administration (FAA) governs drone operations under Part 107 rules.
Example:
- A drone swarm used for agricultural monitoring must operate below 400 feet and within visual line of sight unless special waivers are obtained.
Best Practice:
- Always check local and national airspace maps for no-fly zones such as near airports, military bases, or sensitive infrastructure.
Privacy and Data Protection
Swarm robots and drones often collect data that may include personal information, raising privacy concerns.
Example:
- A surveillance drone swarm deployed in a public park must comply with GDPR by anonymizing collected images and informing the public.
Best Practice:
- Implement data minimization and encryption techniques. Obtain explicit consent when required.
Safety Standards
Ensuring the physical safety of people and property is paramount.
Example:
- A warehouse robot swarm must have collision avoidance sensors and emergency stop capabilities certified by relevant safety bodies.
Best Practice:
- Design redundant safety systems and conduct rigorous testing to meet or exceed regulatory safety standards.
Operational Restrictions
Regulations often specify where, when, and how autonomous swarms can operate.
Example:
- Delivery drone swarms may be restricted from flying at night or in densely populated urban areas without special permissions.
Best Practice:
- Develop geofencing capabilities and dynamic scheduling to comply with operational limits.
Liability and Insurance
Understanding who is responsible in case of accidents or damages is critical.
Example:
- A company operating a drone swarm for infrastructure inspection must carry liability insurance covering potential damages caused by swarm malfunctions.
Best Practice:
- Clearly define operator and manufacturer responsibilities in contracts and ensure appropriate insurance coverage.
Practical Example: Urban Drone Delivery Swarm Compliance
A startup plans to deploy a drone swarm for package delivery in a metropolitan area. Key steps include:
- Registering drones with the aviation authority.
- Implementing geo-fencing to avoid restricted zones.
- Encrypting customer data and anonymizing flight logs.
- Equipping drones with collision avoidance and emergency landing features.
- Scheduling flights during approved hours.
- Obtaining liability insurance and preparing incident response plans.
This integrated approach ensures regulatory compliance while maintaining operational efficiency.
Summary
Navigating legal and regulatory frameworks for autonomous swarms involves multidisciplinary knowledge and proactive planning. By understanding airspace rules, privacy laws, safety standards, operational restrictions, and liability concerns, engineers can design compliant, safe, and socially acceptable swarm systems.
Always consult with legal experts and regulatory bodies early in the design process to stay updated on evolving requirements.
10.4 Best Practice: Implementing Fail-Safe Mechanisms in Swarm Control
Ensuring the safety and reliability of autonomous swarms is paramount, especially when these systems operate in dynamic, unpredictable environments or near humans. Fail-safe mechanisms are design strategies and control protocols that allow the swarm to handle faults, errors, or unexpected events gracefully, minimizing risk and maintaining operational integrity.
Why Fail-Safe Mechanisms Matter in Swarm Control
- Distributed nature: Swarms rely on decentralized decision-making; a single failure can propagate if not managed.
- Complex interactions: Emergent behaviors can amplify faults.
- Safety-critical applications: In domains like search & rescue or delivery, failures can cause harm or mission failure.
Key Principles for Fail-Safe Design in Swarms
Redundancy
- Hardware redundancy: Multiple sensors or processors on individual robots to avoid single points of failure.
- Functional redundancy: Overlapping roles within the swarm so other units can compensate if one fails.
Example: In a drone swarm, if one drone’s GPS fails, it can rely on relative positioning from neighbors to maintain formation.
Fault Detection and Diagnosis
- Continuous monitoring of robot health and communication links.
- Use of heartbeat signals and watchdog timers.
- Algorithms to detect anomalies in behavior or sensor data.
Example: A ground robot detecting wheel slippage or motor failure triggers a status update to the swarm controller.
Graceful Degradation
- When a robot experiences partial failure, it reduces its operational role instead of complete shutdown.
- The swarm adapts by reallocating tasks.
Example: A drone with reduced battery capacity switches from active exploration to a relay communication role.
Recovery Protocols
- Procedures for robots to recover from transient faults, such as rebooting or recalibrating sensors.
- Swarm-level protocols to isolate malfunctioning units temporarily.
Example: A robot stuck in an obstacle attempts self-recovery maneuvers; if unsuccessful, it signals the swarm to reroute.
Safety Overrides and Emergency Stops
- Ability to halt individual robots or the entire swarm in emergencies.
- Manual override options for human operators.
Example: If a drone swarm detects a human entering a restricted zone, it triggers an immediate hover or retreat command.
Fail-Safe Implementation Mind Map
Practical Example: Fail-Safe in a Drone Delivery Swarm
Scenario: A swarm of delivery drones operates in an urban environment.
- Each drone monitors battery health and GPS signal quality.
- If a drone detects low battery, it signals the swarm and switches to a return-to-base mode.
- If GPS signal is lost, the drone switches to relative positioning using onboard cameras and nearby drones.
- Communication loss triggers a hover-and-wait protocol until connection is restored.
- A central control system can issue an emergency stop to all drones if a hazard is detected.
This layered fail-safe approach ensures mission continuity and public safety.
Summary
Implementing fail-safe mechanisms in swarm control involves designing for redundancy, continuous fault detection, graceful degradation, recovery protocols, and emergency overrides. Integrating these strategies at hardware, communication, algorithmic, and decision-making layers, combined with rigorous testing, builds resilient autonomous swarms capable of safe operation in complex environments.
Additional Resources
- “Fault-Tolerant Control of Multi-Robot Systems” by Ren and Beard
- ROS (Robot Operating System) packages for health monitoring
- Simulation tools like Gazebo for failure scenario testing
10.5 Case Study: Compliance Strategies for Urban Drone Delivery Swarms
Urban drone delivery swarms represent a transformative approach to last-mile logistics, offering rapid, scalable, and efficient parcel delivery. However, operating autonomous drone swarms in densely populated urban environments requires strict adherence to safety, legal, and ethical standards. This case study explores effective compliance strategies employed by leading drone delivery companies and research projects to navigate regulatory frameworks while ensuring public safety and operational reliability.
Understanding Urban Drone Delivery Compliance Challenges
- Airspace Regulations: Urban airspace is tightly controlled, with restrictions on altitude, no-fly zones (e.g., near airports, government buildings), and flight corridors.
- Privacy Concerns: Cameras and sensors onboard drones raise privacy issues for residents.
- Safety and Collision Avoidance: Risk of drones colliding with buildings, people, or other aircraft.
- Noise and Environmental Impact: Minimizing disturbance to urban populations.
- Data Security: Protecting communication and operational data from cyber threats.
Compliance Strategy Mind Map
Example 1: FAA Part 107 Compliance and Beyond
The Federal Aviation Administration (FAA) Part 107 rules govern commercial drone operations in the U.S. Companies like Wing (Alphabet subsidiary) have developed comprehensive compliance frameworks:
- Remote Pilot Certification: All operators are certified under Part 107.
- Geofencing: Software restricts drones from entering no-fly zones.
- Real-Time Monitoring: Operations centers track drones live to ensure compliance.
- Automated Return-to-Home: If communication is lost or battery is low, drones return safely.
Best Practice: Integrate geofencing with swarm control algorithms to dynamically adjust flight paths and avoid restricted areas.
Example 2: European U-Space Framework Implementation
The European Union’s U-Space initiative provides a regulatory framework for safe drone integration:
- Traffic Management: Automated systems manage drone traffic in urban airspace.
- Identification and Tracking: Each drone broadcasts identification for accountability.
- Incident Reporting: Mandatory reporting of safety incidents.
Best Practice: Employ swarm-level communication protocols that support real-time identification broadcasting and incident alerts.
Safety Protocols in Practice
- Collision Avoidance: Using onboard LiDAR and computer vision, drones detect obstacles and other swarm members.
- Redundancy: Dual GPS and inertial measurement units (IMUs) ensure reliable localization.
- Fail-Safe Modes: In case of system failure, drones execute controlled emergency landings in pre-designated safe zones.
Example: A drone swarm delivering medical supplies in a city uses layered safety checks before each flight, including weather assessment and airspace clearance.
Privacy Protection Measures
- Limit camera usage to essential navigation only.
- Apply real-time data anonymization techniques to blur or exclude identifiable information.
- Engage with local communities to explain data collection policies.
Example: A delivery company disables video recording over residential areas and only uses infrared sensors for obstacle detection.
Cybersecurity Strategies
- End-to-end encryption of command and telemetry data.
- Regular security audits and penetration testing.
- Secure Over-The-Air (OTA) firmware updates with authentication.
Example: The swarm control system uses blockchain-based authentication to prevent unauthorized command injection.
Community Engagement and Transparency
- Hosting public demonstrations and Q&A sessions.
- Providing real-time flight tracking accessible to residents.
- Establishing feedback channels for concerns and suggestions.
Example: A city-wide pilot program includes an app where residents can view drone delivery routes and submit feedback.
Summary
Compliance for urban drone delivery swarms is multifaceted, requiring a blend of regulatory knowledge, engineering best practices, and proactive community relations. Integrating compliance strategies into swarm design from the outset ensures safer, more reliable, and publicly accepted autonomous delivery systems.
Additional Mind Map: Integration of Compliance into Swarm Engineering
This case study illustrates that successful urban drone delivery swarms must embed compliance deeply into their engineering lifecycle, balancing innovation with responsibility.
11. Real-World Applications and Case Studies
11.1 Agricultural Monitoring and Precision Farming with Robot Swarms
Agricultural monitoring and precision farming have been revolutionized by the integration of autonomous robot swarms. These swarms, composed of drones and ground robots, work collectively to gather data, analyze crop health, optimize resource usage, and perform targeted interventions. The use of swarms enables scalable, efficient, and cost-effective farming practices that improve yield and sustainability.
Key Benefits of Using Robot Swarms in Agriculture
- Scalability: Multiple robots can cover large fields simultaneously, reducing time and labor.
- Redundancy and Fault Tolerance: If one robot fails, others continue the mission without disruption.
- Precision: Targeted interventions reduce waste of water, fertilizers, and pesticides.
- Real-time Data Collection: Continuous monitoring allows for timely decision-making.
Mind Map: Agricultural Monitoring with Robot Swarms
Example 1: Drone Swarm for Crop Health Monitoring
A swarm of lightweight drones equipped with multispectral cameras flies over a large wheat field. Each drone captures images that reveal plant health indicators such as chlorophyll levels and water stress. The swarm divides the field into sectors, with each drone assigned a specific area to survey. Data is streamed to a central system where AI algorithms analyze the images to detect early signs of disease or pest infestation.
Best Practice: Use decentralized task allocation algorithms so drones can dynamically reassign sectors if one drone encounters a malfunction or low battery, ensuring full coverage without human intervention.
Mind Map: Precision Farming Tasks Executed by Robot Swarms
Example 2: Ground Robot Swarm for Targeted Weed Removal
A fleet of small autonomous ground robots patrols a cornfield to identify and remove weeds. Each robot is equipped with cameras and machine learning models trained to distinguish weeds from crops. Upon detection, the robot uses a mechanical arm or targeted herbicide application to eliminate the weed.
Best Practice: Implement inter-robot communication protocols to share weed location data in real-time, preventing redundant work and optimizing coverage.
Integration Example: Combined Air-Ground Swarm for Holistic Farm Management
In advanced precision farming setups, drone swarms perform aerial surveys to identify zones requiring attention, such as areas with low soil moisture or pest outbreaks. Ground robot swarms then execute targeted interventions like irrigation or pesticide application based on drone data.
Best Practice: Develop a hierarchical control system where aerial drones act as scouts providing high-level situational awareness, while ground robots execute detailed tasks, enabling efficient division of labor.
Challenges and Solutions
- Communication in Large Fields: Use mesh networking and relay drones to maintain connectivity.
- Energy Constraints: Schedule rotations and charging stations to maintain continuous operation.
- Environmental Variability: Employ adaptive algorithms that adjust to weather and crop growth stages.
Summary
Robot swarms in agricultural monitoring and precision farming offer transformative potential by enabling detailed, scalable, and efficient farm management. Through careful design of swarm behaviors, communication, and task allocation, these systems can significantly boost productivity while reducing environmental impact.
Further Reading and Tools
- Open-source platforms: ROS (Robot Operating System) for swarm robotics
- Simulation tools: Gazebo with agricultural environment plugins
- Research papers on swarm-based precision agriculture
11.2 Disaster Response and Search & Rescue Operations
Disaster response and search & rescue (SAR) operations present some of the most challenging and impactful applications for autonomous swarms. Leveraging the collective intelligence, adaptability, and scalability of drone and robot swarms can significantly enhance situational awareness, speed, and safety in these critical missions.
Why Use Autonomous Swarms in Disaster Response?
- Rapid Deployment: Swarms can be quickly deployed over large and complex terrains.
- Scalability: Multiple units work in parallel, covering more ground than single robots.
- Robustness: Failure of individual units does not compromise the entire mission.
- Flexibility: Swarms can adapt to dynamic environments and unexpected obstacles.
Key Functionalities of Swarms in SAR
- Environment mapping and hazard detection
- Victim localization and identification
- Communication relay in infrastructure-compromised zones
- Delivery of essential supplies
Best Practices for Engineering Disaster Response Swarms
- Distributed Sensing and Data Fusion: Each robot gathers local data, which is fused collectively to build a comprehensive situational picture.
- Adaptive Task Allocation: Dynamically assign roles based on current swarm status and environmental conditions.
- Robust Communication Networks: Implement mesh networks to maintain connectivity despite obstacles or node failures.
- Energy-Aware Operation: Optimize power usage to maximize mission duration.
Mind Map: Core Components of Disaster Response Swarms
Example 1: Drone Swarm for Earthquake Search & Rescue
Scenario: After a major earthquake, a swarm of 20 drones is deployed to locate survivors trapped under rubble.
Implementation Highlights:
- Drones equipped with thermal imaging and microphones detect heat signatures and faint sounds.
- A decentralized algorithm enables drones to divide the search area autonomously.
- Real-time data fusion creates a heatmap of potential survivor locations, shared with ground teams.
- Mesh networking maintains communication despite damaged infrastructure.
Outcome: The swarm reduced search time by 60% compared to traditional methods, enabling faster medical response.
Mind Map: Workflow of Earthquake Drone Swarm
Example 2: Ground Robot Swarm for Flooded Area Assessment
Scenario: A swarm of amphibious ground robots is tasked with assessing flood damage and locating stranded individuals.
Implementation Highlights:
- Robots use sonar and water-quality sensors to navigate and assess hazards.
- Cooperative SLAM enables mapping of flooded, GPS-denied environments.
- Adaptive task allocation allows some robots to focus on mapping while others search for victims.
- Robots deliver emergency supplies to isolated individuals.
Outcome: The swarm provided detailed flood maps and located multiple stranded people, improving rescue efficiency.
Mind Map: Amphibious Robot Swarm Capabilities
Integration of Human-Swarm Interaction
- Human-in-the-loop Control: Operators can assign high-level goals and intervene when necessary.
- Visual Analytics: Real-time dashboards visualize swarm data for decision-makers.
- Voice and Gesture Commands: Emerging interfaces allow intuitive control in chaotic environments.
Summary
Autonomous swarms in disaster response and SAR operations combine advanced sensing, robust communication, and intelligent control to transform emergency management. By following best practices such as distributed sensing, adaptive task allocation, and robust networking, engineers can design swarms that save lives and improve operational efficiency.
Further Reading and Tools
- ROS (Robot Operating System) packages for swarm robotics
- Simulation platforms like Gazebo and Webots for SAR scenarios
- Research papers on multi-robot coordination in disaster environments
This section highlights how engineering principles and real-world examples converge to create effective autonomous swarms for disaster response, providing readers with actionable insights and inspiration.
11.3 Industrial Automation and Warehouse Management
Industrial automation and warehouse management have seen transformative improvements through the integration of autonomous swarms of robots. These swarms enable scalable, flexible, and efficient operations that traditional single-robot or manual systems struggle to achieve.
Overview
Autonomous swarms in industrial settings typically consist of multiple mobile robots working collaboratively to perform tasks such as inventory management, material transport, sorting, and packaging. Their collective intelligence allows for dynamic task allocation, fault tolerance, and optimized workflow.
Mind Map: Key Components of Swarm Robotics in Industrial Automation
Best Practice: Dynamic Task Allocation Using Market-Based Mechanisms
One effective approach to managing swarm tasks in warehouses is market-based task allocation, where each robot bids for tasks based on its current state (location, battery, load capacity). This decentralized method reduces bottlenecks and improves efficiency.
Example:
- Robots continuously broadcast their availability and estimated cost to complete tasks.
- A central or distributed auction mechanism assigns tasks to the most suitable robot.
- If a robot fails or becomes unavailable, tasks are quickly reallocated.
This approach was successfully implemented by Amazon Robotics in their fulfillment centers, where hundreds of robots dynamically coordinate to move shelves and packages.
Example Scenario: Swarm Robots in a Warehouse Picking System
Scenario: A swarm of 50 autonomous mobile robots (AMRs) is deployed in a large warehouse to pick items from shelves and deliver them to packing stations.
- Task Assignment: Robots receive picking tasks based on real-time order data.
- Navigation: Using distributed path planning, robots avoid collisions and congestion.
- Communication: Robots share location and task status over a wireless mesh network.
- Fault Handling: If a robot encounters an obstacle or mechanical issue, nearby robots redistribute its pending tasks.
Outcome: This system reduces order fulfillment time by 30% and increases throughput while minimizing human labor.
Mind Map: Workflow of Swarm Robots in Warehouse Picking
Integration with Warehouse Management Systems (WMS)
For maximum efficiency, swarm robotics systems must integrate seamlessly with existing WMS and Enterprise Resource Planning (ERP) systems. This integration enables:
- Real-time inventory updates
- Automated replenishment triggers
- Analytics on robot performance and workflow bottlenecks
Example:
A robotics swarm deployed by Fetch Robotics integrates with SAP’s WMS to synchronize order data and inventory status, enabling synchronized operations across robotic and human teams.
Safety and Human-Robot Collaboration
In many warehouses, robots operate alongside human workers. Swarm systems incorporate safety best practices such as:
- Real-time obstacle detection and emergency stop
- Predictive path planning to avoid human traffic
- Visual and audio alerts for nearby humans
Example:
In DHL’s warehouses, collaborative robots (cobots) work in swarms to assist human pickers by autonomously transporting heavy loads, reducing worker fatigue and injury risk.
Summary
Industrial automation and warehouse management benefit greatly from autonomous swarms through enhanced scalability, flexibility, and operational efficiency. By leveraging decentralized control, dynamic task allocation, and robust communication, swarm robotics systems optimize workflows and improve safety.
The integration of these swarms with existing warehouse infrastructure and human teams is critical to realizing their full potential.
References & Further Reading
- “Swarm Robotics in Warehouse Automation: A Review,” Journal of Robotics, 2022.
- Amazon Robotics: https://www.amazonrobotics.com/
- Fetch Robotics Case Studies: https://fetchrobotics.com/case-studies/
- DHL Robotics and Automation: https://www.dhl.com/global-en/home/insights-and-innovation/insights/robotics.html
11.4 Environmental Monitoring and Wildlife Conservation
Environmental monitoring and wildlife conservation are critical areas where autonomous swarms of drones and robots have shown transformative potential. These swarms enable large-scale, continuous, and minimally invasive data collection, helping researchers and conservationists make informed decisions to protect ecosystems and endangered species.
Key Applications of Autonomous Swarms in Environmental Monitoring
- Habitat Mapping: Using aerial drones to create high-resolution maps of forests, wetlands, coral reefs, and other habitats.
- Wildlife Tracking: Monitoring animal populations and movements with ground and aerial robots equipped with sensors.
- Pollution Detection: Detecting air, water, and soil pollution through distributed sensor networks.
- Disaster Impact Assessment: Rapid assessment of natural disasters like wildfires, floods, and hurricanes.
Mind Map: Environmental Monitoring with Autonomous Swarms
Best Practices and Examples
Coordinated Habitat Mapping Using Drone Swarms
Practice: Deploy multiple drones equipped with multispectral cameras to cover large forested areas efficiently. Each drone follows a pre-planned flight path with overlap to ensure complete coverage and data redundancy.
Example: The Rainforest Connection project uses drone swarms to monitor deforestation in the Amazon by capturing high-resolution images and detecting illegal logging activities early.
Wildlife Tracking with Ground and Aerial Robots
Practice: Combine ground robots with aerial drones to track elusive or nocturnal animals. Ground robots can carry acoustic sensors to detect animal calls, while drones provide thermal imaging for night-time monitoring.
Example: Researchers in Kenya deployed a swarm of drones and ground robots to monitor elephant movements, reducing human-wildlife conflicts and poaching risks.
Mind Map: Wildlife Tracking Techniques
Pollution Detection with Distributed Sensor Networks
Practice: Equip a swarm of aquatic robots with chemical sensors to monitor water quality across lakes or coastal areas. Robots communicate data in real-time to a central hub for analysis.
Example: The AquaSwarm project uses a fleet of autonomous surface vehicles to detect harmful algal blooms in freshwater lakes, enabling timely alerts to local authorities.
Disaster Impact Assessment and Rapid Response
Practice: Use drone swarms to quickly map wildfire-affected areas, providing real-time data on fire spread and damage extent. Robots can also identify safe zones and potential hazards for rescue teams.
Example: During the 2020 Australian bushfires, drone swarms were deployed to assess damage and monitor hotspots, significantly improving situational awareness for firefighters.
Integration of Data and Collective Intelligence
Swarms not only collect data but also process and share it collectively to improve mission outcomes.
- Real-Time Data Fusion: Combining sensor data from multiple robots to create comprehensive environmental models.
- Adaptive Sampling: Robots dynamically adjust their paths based on detected anomalies or areas of interest.
- Machine Learning: Identifying patterns such as animal migration routes or pollution sources.
Mind Map: Data Integration and Intelligence
Summary
Autonomous swarms provide scalable, efficient, and minimally invasive solutions for environmental monitoring and wildlife conservation. By leveraging coordinated behaviors, diverse sensing modalities, and collective intelligence, these systems empower researchers and conservationists to better understand and protect our natural world.
References & Further Reading
- “Swarm Robotics for Environmental Monitoring: A Review” – Journal of Field Robotics
- Rainforest Connection: https://rfcx.org/
- AquaSwarm Project: https://www.aquaswarm.org/
- “Using Drone Swarms for Wildlife Conservation” – IEEE Robotics & Automation Magazine
11.5 Best Practice: Integrating Multi-Modal Robots for Complex Missions
Integrating multi-modal robots—robots with different locomotion capabilities, sensors, and functionalities—into a cohesive swarm is a powerful approach to tackle complex missions that require diverse skills and adaptability. This best practice section explores strategies, challenges, and examples for engineering such heterogeneous swarms, emphasizing coordination, communication, and task allocation.
Understanding Multi-Modal Robot Integration
Multi-modal robot swarms combine aerial drones, ground robots, underwater vehicles, and sometimes even climbing or legged robots to leverage their unique strengths. For example, drones provide rapid aerial surveillance, ground robots handle payload transport or manipulation, and underwater robots monitor aquatic environments.
Key Benefits:
- Complementary Capabilities: Different robots cover each other’s limitations.
- Mission Flexibility: Adapt to diverse terrains and tasks.
- Robustness: Failure of one modality can be compensated by others.
Mind Map: Core Components of Multi-Modal Robot Integration
Best Practices for Effective Integration
-
Define Clear Roles and Capabilities:
- Map each robot type’s strengths to specific mission tasks.
- Example: In a disaster response mission, drones perform aerial mapping, ground robots clear debris, and legged robots access confined spaces.
-
Develop Robust Communication Frameworks:
- Use middleware supporting heterogeneous devices (e.g., ROS2 DDS, MQTT).
- Implement protocols that handle intermittent connectivity and varying bandwidth.
-
Implement Adaptive Task Allocation Algorithms:
- Use market-based or auction algorithms to dynamically assign tasks based on robot availability and capability.
- Example: An auction-based system where drones bid for reconnaissance tasks while ground robots bid for transport tasks.
-
Synchronize Multi-Modal Movements:
- Coordinate timing and spatial positioning to avoid collisions and maximize efficiency.
- Example: A drone scouting ahead signals ground robots to prepare for obstacle navigation.
-
Leverage Sensor Fusion Across Modalities:
- Combine data from aerial cameras, LIDAR on ground robots, and sonar from underwater units to build a comprehensive environment model.
-
Design Modular and Interoperable Hardware Interfaces:
- Use standardized connectors and communication ports to facilitate integration and maintenance.
-
Test in Incremental Stages:
- Start with pairwise robot interactions before scaling to full multi-modal swarms.
Mind Map: Example Mission Workflow for Multi-Modal Swarm
Real-World Example: Search and Rescue Operation
Scenario: After an earthquake, a multi-modal swarm is deployed to locate survivors and assess structural damage.
- Drones: Perform rapid aerial reconnaissance, thermal imaging to detect heat signatures.
- Ground Robots: Navigate rubble to deliver supplies or clear debris.
- Legged Robots: Access unstable or uneven terrain inaccessible to wheeled robots.
Integration Highlights:
- Drones relay live maps to ground and legged robots.
- Task allocation system dynamically assigns robots based on proximity and capability.
- Communication network adapts to signal obstructions caused by collapsed structures.
Outcome: Faster victim location, improved safety for human responders, and efficient resource deployment.
Example Code Snippet: Simple Task Allocation Using Auction Algorithm (Python Pseudocode)
robots = ["drone1", "ground1", "legged1"]
tasks = ["aerial_survey", "debris_clear", "confined_inspect"]
# Each robot bids based on capability and current load
bids = {
"drone1": {"aerial_survey": 10, "debris_clear": 2, "confined_inspect": 1},
"ground1": {"aerial_survey": 1, "debris_clear": 9, "confined_inspect": 3},
"legged1": {"aerial_survey": 1, "debris_clear": 4, "confined_inspect": 8}
}
# Auction: Assign each task to highest bidder
assignments = {}
for task in tasks:
best_robot = max(robots, key=lambda r: bids[r][task])
assignments[task] = best_robot
print(assignments)
# Output: {'aerial_survey': 'drone1', 'debris_clear': 'ground1', 'confined_inspect': 'legged1'}
Summary
Integrating multi-modal robots into autonomous swarms unlocks the potential for highly capable, flexible, and resilient systems. By carefully designing coordination mechanisms, communication protocols, and adaptive control strategies, engineers can orchestrate complex missions that no single robot type could accomplish alone. Starting with clear role definitions, robust communication, and incremental testing ensures successful deployment of these sophisticated swarms.
Further Reading & Tools
- ROS2 for heterogeneous robot communication
- Market-based task allocation algorithms
- Multi-robot SLAM and sensor fusion techniques
- Case studies on disaster response multi-modal swarms
12. Future Trends and Research Directions
12.1 Advances in Bio-Inspired Swarm Algorithms
Bio-inspired swarm algorithms draw inspiration from natural systems where collective intelligence emerges from simple individual behaviors. These algorithms enable autonomous swarms of drones and robots to perform complex tasks efficiently, robustly, and adaptively. Recent advances have expanded their applicability, scalability, and real-world performance.
Key Bio-Inspired Swarm Algorithms and Their Advances
Example: Dynamic Task Allocation Using Bee Colony Algorithm
In a swarm of ground robots tasked with environmental sampling, the bee colony algorithm can be used to dynamically allocate robots to different sampling sites based on resource availability and priority.
- Each robot acts as a bee scout, exploring and evaluating sites.
- Successful scouts recruit others by broadcasting site quality (analogous to waggle dance).
- The swarm collectively converges on high-priority sites, balancing workload.
This approach improves efficiency and robustness compared to static task assignments.
Mind Map: Core Principles of Bio-Inspired Swarm Algorithms
Bio-Inspired Swarm Algorithms Mind Map
Example: Hybrid PSO for Adaptive Drone Formation
A recent study combined Particle Swarm Optimization with reinforcement learning to adaptively tune the PSO parameters based on environmental feedback. This hybrid approach allowed a drone swarm to maintain tight formations while dynamically avoiding obstacles and responding to wind disturbances.
- PSO handles position updates based on neighbors’ best positions.
- Reinforcement learning adjusts inertia and acceleration coefficients in real-time.
- Result: Improved formation stability and energy efficiency.
Mind Map: Recent Trends in Bio-Inspired Swarm Algorithms
Recent Trends Mind Map
Summary
Advances in bio-inspired swarm algorithms continue to push the boundaries of what autonomous swarms can achieve. By mimicking nature’s efficient, robust, and scalable collective behaviors, engineers and researchers develop algorithms that enable drones and robots to collaborate seamlessly in complex, dynamic environments. Integrating these algorithms with modern AI techniques and hardware innovations promises even greater capabilities for future autonomous swarm systems.
12.2 Integration of 5G and Edge Computing in Swarm Systems
The integration of 5G and edge computing technologies is revolutionizing the capabilities and performance of autonomous swarm systems. These advancements enable ultra-low latency communication, high bandwidth data transfer, and distributed processing power close to the swarm, which are critical for real-time decision making and coordination in complex environments.
Why 5G and Edge Computing Matter for Swarm Systems
- Ultra-Low Latency: 5G networks can reduce communication delays to as low as 1 millisecond, allowing drones and robots in a swarm to synchronize actions and share sensor data almost instantaneously.
- High Bandwidth: Swarms often generate large volumes of data (video feeds, sensor arrays). 5G supports high throughput to handle this data without bottlenecks.
- Edge Computing: By processing data at the network edge (near the swarm), edge computing reduces the need to send all data to centralized cloud servers, cutting latency and bandwidth use.
- Scalability: 5G and edge infrastructure support large numbers of connected devices, enabling swarms to scale up without loss of performance.
Mind Map: Benefits of 5G and Edge Computing in Swarm Robotics
Practical Examples
Example 1: Drone Swarm for Real-Time Disaster Monitoring
A drone swarm deployed for wildfire monitoring leverages 5G to stream high-definition thermal and visual data to edge servers located near the disaster site. The edge servers perform real-time image processing to detect fire hotspots and relay actionable insights back to the swarm for adaptive path planning.
- Best Practice: Use 5G-enabled drones with onboard sensors connected to edge nodes for immediate data processing.
- Outcome: Faster detection and response times compared to traditional cloud-based systems.
Example 2: Warehouse Robot Swarm with Edge-Assisted Coordination
In a large warehouse, a swarm of autonomous ground robots communicates over a private 5G network. Edge computing units installed onsite process navigation data and coordinate task assignments dynamically, minimizing collisions and optimizing delivery routes.
- Best Practice: Deploy edge servers physically close to the robots to handle computationally intensive tasks like SLAM and multi-agent path planning.
- Outcome: Improved throughput and reduced latency in robot coordination.
Mind Map: Architecture of 5G and Edge-Enabled Swarm System
Implementation Considerations and Best Practices
-
Network Slicing: Utilize 5G network slicing to allocate dedicated bandwidth and latency guarantees for swarm communication, ensuring predictable performance.
-
Edge Node Placement: Strategically place edge servers close to the operational area of the swarm to minimize communication delays.
-
Security: Implement end-to-end encryption and secure authentication mechanisms to protect swarm data transmitted over 5G.
-
Hybrid Processing: Balance onboard processing, edge computing, and cloud resources to optimize latency, power consumption, and computational load.
-
Adaptive Communication: Design swarm communication protocols that can dynamically adjust to network conditions, leveraging 5G’s flexibility.
Example: Implementing a 5G-Enabled Drone Swarm for Precision Agriculture
- Setup: Equip drones with 5G modems and multispectral cameras.
- Edge Deployment: Deploy edge servers at the farm perimeter for real-time crop health analysis.
- Operation: Drones collect and stream data via 5G to edge nodes.
- Processing: Edge nodes run AI models to detect crop stress and send instructions back to drones for targeted spraying.
- Outcome: Reduced chemical use, improved crop yield, and efficient resource management.
Summary
The fusion of 5G and edge computing empowers autonomous swarms with enhanced communication, real-time processing, and scalability. By adopting these technologies, engineers can design swarm systems that are more responsive, efficient, and capable of tackling complex, dynamic tasks across various domains.
12.3 Human-Swarm Interaction and Collaborative Autonomy
Human-Swarm Interaction (HSI) is an emerging interdisciplinary field that focuses on how humans can effectively interact, supervise, and collaborate with autonomous swarms of robots or drones. As swarm systems grow in complexity and autonomy, designing intuitive, efficient, and safe interfaces between humans and swarms becomes crucial.
Key Concepts in Human-Swarm Interaction
- Levels of Autonomy: Ranges from fully manual control to fully autonomous swarm behavior with human oversight.
- Control Paradigms: Direct control, supervisory control, and mixed-initiative control.
- Communication Channels: Visual, auditory, haptic feedback, and augmented reality.
- Trust and Transparency: Ensuring humans understand swarm decisions to build trust.
- Cognitive Load Management: Designing interfaces that minimize operator overload.
Mind Map: Core Components of Human-Swarm Interaction
Collaborative Autonomy
Collaborative autonomy refers to the shared decision-making process between humans and swarms, where both contribute to mission success. Instead of humans micromanaging every robot, they provide high-level goals or constraints, and the swarm autonomously adapts and executes.
Example: In a search and rescue mission, a human operator may specify areas of interest or priority zones, while the swarm autonomously divides the search area, coordinates to avoid overlap, and adapts to obstacles or new information.
Mind Map: Collaborative Autonomy Workflow
Best Practices and Examples
-
Design Intuitive Interfaces: Use dashboards with clear visualizations of swarm status, health, and mission progress.
- Example: A drone swarm control interface showing real-time positions on a map with color-coded status indicators.
-
Implement Mixed-Initiative Control: Allow the swarm to suggest actions or alert humans to anomalies, enabling collaborative decision-making.
- Example: A robot swarm detecting a hazardous gas leak autonomously alerts the operator and suggests evacuation routes.
-
Use Augmented Reality (AR) for Enhanced Situational Awareness: Overlay swarm data on the operator’s real-world view.
- Example: Firefighters wearing AR glasses see drone positions and thermal imaging data during a wildfire.
-
Manage Cognitive Load: Automate routine tasks and provide summarized alerts to avoid overwhelming the operator.
- Example: Swarm autonomously handles formation flying while the human focuses on mission-level decisions.
-
Build Trust through Transparency: Provide explanations for swarm decisions and predicted behaviors.
- Example: A swarm control system shows why a subgroup of robots is rerouting due to detected obstacles.
Example Scenario: Agricultural Monitoring with Human-Swarm Collaboration
- Human Role: Define monitoring zones, set crop health thresholds, and review alerts.
- Swarm Role: Autonomously fly drones over fields, collect multispectral data, identify anomalies, and report findings.
- Interaction: Operator receives summarized reports and can command the swarm to focus on specific areas for detailed inspection.
Mind Map: Agricultural Monitoring Human-Swarm Interaction
Challenges and Research Directions
- Developing standardized metrics to evaluate HSI effectiveness.
- Enhancing natural language interfaces for commanding swarms.
- Improving swarm explainability and predictability.
- Balancing autonomy and human control to optimize mission outcomes.
Human-swarm interaction and collaborative autonomy represent a pivotal frontier in swarm robotics, enabling humans and machines to work synergistically for complex tasks. By integrating best practices such as intuitive interface design, mixed-initiative control, and transparent communication, engineers can build swarm systems that empower operators and enhance mission success.
12.4 Best Practice: Preparing for Scalable and Heterogeneous Swarm Deployments
Scaling autonomous swarms and integrating heterogeneous agents—robots or drones with different capabilities, sensors, and roles—pose unique engineering challenges. Preparing for such deployments requires thoughtful design, modularity, robust communication, and adaptive control strategies. This section explores best practices with illustrative examples and mind maps to guide engineers in building scalable, diverse swarms.
Key Considerations for Scalable & Heterogeneous Swarms
- Modularity & Interoperability: Design hardware and software components that can be easily combined or swapped.
- Robust Communication: Ensure reliable data exchange despite increased network size and diversity.
- Adaptive Control Algorithms: Use flexible algorithms that accommodate different agent types and dynamic swarm sizes.
- Resource Management: Efficiently allocate tasks and power among heterogeneous agents.
- Fault Tolerance & Redundancy: Prepare for failures in individual agents without compromising swarm objectives.
Mind Map: Preparing for Scalable and Heterogeneous Swarm Deployments
Best Practice 1: Modular Hardware and Software Architecture
Example:
A drone swarm designed for environmental monitoring includes fixed-wing drones for long-range coverage and quadcopters for detailed local inspection. Each drone shares a common communication module and a standardized API for control commands.
- Why it works: Modular design allows easy integration of new drone types without rewriting the entire control software.
- Implementation tip: Use middleware like ROS (Robot Operating System) with standardized message formats to facilitate interoperability.
Best Practice 2: Robust and Scalable Communication Protocols
Example:
A warehouse robot swarm uses a mesh network protocol (e.g., Zigbee or custom Wi-Fi mesh) that dynamically adjusts routing paths as robots move or join/leave the network.
- Why it works: Mesh networking supports scalability by avoiding single points of failure and enabling dynamic topology.
- Implementation tip: Employ adaptive frequency hopping and collision avoidance at the communication layer to maintain throughput.
Mind Map: Communication Strategies for Scalable Swarms
Best Practice 3: Adaptive Control and Role Assignment
Example:
In a heterogeneous swarm for search and rescue, robots are assigned roles dynamically based on their sensor suite and battery level. Ground robots with thermal cameras focus on victim detection, while aerial drones map the terrain.
- Why it works: Dynamic role assignment optimizes resource use and adapts to changing conditions.
- Implementation tip: Use consensus algorithms and distributed decision-making frameworks to allow agents to negotiate roles autonomously.
Best Practice 4: Scalable Simulation and Testing
Example:
Before deployment, an autonomous agricultural swarm with multiple robot types is tested in a scalable simulation environment like Gazebo integrated with ROS, simulating hundreds of agents with varying capabilities.
- Why it works: Simulations help identify bottlenecks in communication and control algorithms at scale.
- Implementation tip: Model heterogeneity explicitly in simulation by defining different agent classes with unique parameters.
Summary Table: Best Practices with Examples
| Best Practice | Example Scenario | Key Benefit |
|---|---|---|
| Modular Architecture | Environmental monitoring drones | Easy integration and upgrades |
| Robust Communication Protocols | Warehouse robot mesh network | Reliable data exchange at scale |
| Adaptive Control & Role Assignment | Search and rescue heterogeneous swarm | Optimized task allocation |
| Scalable Simulation & Testing | Agricultural multi-robot simulation | Early detection of scalability issues |
Final Tips
- Start with a small heterogeneous swarm prototype before scaling.
- Use open standards and frameworks to future-proof your system.
- Continuously monitor swarm health and performance during deployment.
- Incorporate machine learning to enable the swarm to adapt to new agents or environments.
By following these best practices, engineers can build autonomous swarms that not only scale efficiently but also leverage the strengths of diverse robotic agents to achieve complex collective intelligence.
12.5 Vision: The Role of Autonomous Swarms in Smart Cities
As urban environments evolve into smart cities, the integration of autonomous swarm systems—comprising drones, ground robots, and sensor networks—promises to revolutionize city management, sustainability, and citizen well-being. These swarms leverage collective intelligence to perform complex tasks efficiently, adaptively, and resiliently, addressing the dynamic challenges of urban life.
Mind Map: Autonomous Swarms in Smart Cities
Detailed Exploration with Examples
Urban Infrastructure Management
Example: In Singapore, drone swarms are being tested for bridge inspections. Instead of sending human inspectors into hazardous environments, coordinated drones equipped with high-resolution cameras and LIDAR sensors autonomously scan structural elements, detect cracks, and generate 3D models for engineers. This reduces inspection time from days to hours and improves safety.
Best Practice: Use decentralized control algorithms to allow drones to autonomously divide inspection zones and share data in real time, ensuring full coverage without overlap.
Public Safety & Emergency Response
Example: During wildfires in California, autonomous drone swarms equipped with thermal cameras can rapidly map fire fronts and hotspots. Ground robot swarms can then be deployed to deliver supplies or create firebreaks. The swarm’s collective intelligence enables dynamic task allocation based on evolving conditions.
Best Practice: Implement robust communication protocols with mesh networking to maintain swarm coordination even if some units are lost or communication is disrupted.
Environmental Monitoring
Example: Barcelona employs drone swarms to monitor air pollution levels across the city. Each drone carries gas sensors and shares data to create a real-time pollution heatmap. This data informs city policies and alerts citizens during high pollution events.
Best Practice: Combine fixed sensor networks with mobile swarms to enhance spatial and temporal resolution of environmental data.
Smart Mobility & Logistics
Example: In Dubai, autonomous delivery drones operate in swarms to distribute parcels efficiently. The swarm dynamically plans routes to avoid congested airspace and optimize battery usage, ensuring timely deliveries.
Best Practice: Use machine learning to predict demand patterns and adapt swarm deployment accordingly.
Citizen Engagement & Services
Example: In Seoul, mobile robot swarms act as interactive guides in public parks, providing information and assistance to visitors. They coordinate to cover large areas and avoid crowding.
Best Practice: Design human-swarm interaction protocols that allow citizens to easily communicate with and command the swarm.
Energy Management
Example: Autonomous robot swarms clean solar panels in large urban solar farms in Germany. Coordinated cleaning improves energy efficiency and reduces maintenance costs.
Best Practice: Schedule swarm tasks during low energy demand periods to maximize grid stability.
Mind Map: Benefits and Challenges
Final Thoughts
Autonomous swarms represent a transformative technology for smart cities, enabling unprecedented levels of automation, responsiveness, and intelligence. By embracing best practices such as decentralized control, robust communication, and human-swarm interaction design, engineers and city planners can harness the full potential of these systems to create safer, cleaner, and more efficient urban environments.
The future smart city will be a living ecosystem where autonomous swarms operate seamlessly alongside humans, augmenting capabilities and addressing complex challenges with collective intelligence.
13. Conclusion and Practical Takeaways
13.1 Recap of Key Engineering Principles for Autonomous Swarms
Autonomous swarms represent a complex interplay of robotics, control systems, communication, and collective intelligence. To engineer effective and robust swarms, several foundational principles must be understood and applied. This section revisits these core engineering principles, supported by illustrative mind maps and practical examples to solidify understanding.
Decentralized Control and Scalability
At the heart of swarm engineering lies decentralized control, where each agent operates based on local information and simple rules, enabling scalability and robustness.
Example: In a drone swarm performing area surveillance, each drone independently decides its flight path based on nearby drones’ positions, avoiding collisions without a central coordinator. This approach allows the swarm to scale from 10 to 100 drones without redesigning the control system.
Communication and Networking
Reliable and efficient communication protocols are essential for coordination and data sharing among swarm agents.
Example: A mesh network implemented in ground robots enables dynamic rerouting of messages if some nodes fail, ensuring continuous coordination during search and rescue missions.
Sensing and Perception
Swarm agents must perceive their environment and neighbors accurately to make informed decisions.
Example: Robots equipped with LIDAR and cameras collaboratively build a map of an unknown environment using cooperative SLAM, improving navigation accuracy.
Robustness and Fault Tolerance
Swarm systems must gracefully handle agent failures and environmental uncertainties.
Example: In a warehouse robot swarm, if some robots malfunction, others dynamically redistribute tasks to maintain operational efficiency without human intervention.
Emergent Behavior through Simple Rules
Complex collective behaviors emerge from simple interaction rules among agents.
Example: Using the Boids algorithm, a swarm of drones exhibits flocking behavior, maintaining formation while navigating through obstacles.
Adaptive and Learning Capabilities
Incorporating AI and machine learning enables swarms to adapt to changing environments and optimize performance.
Example: A drone swarm uses reinforcement learning to improve cooperative object transport, dynamically adjusting strategies based on success feedback.
Simulation and Testing
Thorough simulation and iterative testing are critical before real-world deployment.
Example: Developers simulate a 50-robot swarm in Gazebo to test collision avoidance algorithms before deploying the swarm in a factory setting.
Summary Mind Map: Key Engineering Principles
By internalizing these principles and applying them thoughtfully, engineers can design autonomous swarms that are scalable, resilient, and capable of complex collective intelligence, ready to tackle real-world challenges.
13.2 Summary of Best Practices with Real-World Examples
In this section, we consolidate the essential best practices covered throughout the blog, illustrated with real-world examples to provide clarity and actionable insights for engineering autonomous swarms.
Best Practice 1: Start Small and Prototype Early
- Description: Begin with simple swarm behaviors and small-scale prototypes to validate concepts before scaling up.
- Example: The Kilobot project by Harvard uses hundreds of small, inexpensive robots to test collective behaviors such as shape formation and collective decision-making.
Best Practice 2: Leverage Nature-Inspired Algorithms
- Description: Utilize algorithms inspired by natural systems (e.g., flocking, foraging, ant colony optimization) to achieve robust, scalable swarm behaviors.
- Example: The Boids algorithm simulates bird flocking and has been successfully applied to drone formations for smooth coordinated flight.
Best Practice 3: Design for Decentralized Control
- Description: Favor decentralized control architectures to improve fault tolerance and scalability.
- Example: The RoboBees project employs decentralized control where each micro-robot operates autonomously but coordinates via local communication.
Best Practice 4: Implement Robust Communication Protocols
- Description: Use mesh networking and reliable wireless protocols to maintain connectivity in dynamic swarm environments.
- Example: The Crazyflie drone swarm utilizes a custom mesh network allowing drones to share positional data and coordinate flight paths in real-time.
Best Practice 5: Prioritize Cooperative Localization and Mapping
- Description: Enable robots to share localization and mapping data to improve situational awareness and navigation.
- Example: The NASA Swarmathon competition encourages teams to develop cooperative SLAM algorithms for robot swarms exploring unknown environments.
Best Practice 6: Use Adaptive Path Planning and Collision Avoidance
- Description: Incorporate real-time adaptive algorithms to navigate dynamic environments and avoid collisions.
- Example: Amazon Robotics employs multi-agent pathfinding algorithms in warehouse robots to optimize routes and prevent collisions.
Best Practice 7: Integrate Machine Learning for Behavior Optimization
- Description: Apply reinforcement learning and evolutionary algorithms to enable swarms to adapt and optimize their collective behavior.
- Example: Research on drone swarms transporting objects cooperatively uses reinforcement learning to improve coordination efficiency.
Best Practice 8: Rigorously Simulate Before Deployment
- Description: Use scalable simulation environments to test swarm algorithms and hardware interactions before real-world deployment.
- Example: The Gazebo simulator is widely used to model multi-robot systems and validate swarm behaviors under various conditions.
Best Practice 9: Embed Safety and Fail-Safe Mechanisms
- Description: Design fail-safe protocols and emergency behaviors to ensure safe swarm operation in unpredictable scenarios.
- Example: DJI drones incorporate automatic return-to-home and obstacle avoidance features to prevent accidents during autonomous missions.
Final Thoughts
By integrating these best practices, engineers and researchers can design autonomous swarms that are scalable, robust, and efficient. The real-world examples demonstrate the practical applicability of these principles across diverse domains—from micro-robotics to large-scale drone fleets—empowering you to build the next generation of collective intelligent systems.
13.3 Guidelines for Starting Your Own Swarm Robotics Project
Embarking on a swarm robotics project can be both exciting and challenging. To help you navigate this journey effectively, we’ve compiled a comprehensive set of guidelines that cover the essential steps, considerations, and best practices. These guidelines are designed to ensure a smooth development process, from initial concept to deployment.
Step 1: Define Clear Objectives and Scope
Before diving into hardware or software, clarify what you want your swarm to achieve.
- Purpose: Surveillance, search and rescue, environmental monitoring, agriculture, etc.
- Scale: Number of robots/drones involved.
- Environment: Indoor, outdoor, structured, or unstructured.
Example: If you aim to build a drone swarm for agricultural crop monitoring, your objectives might include coverage area, flight time, and data resolution.
Step 2: Choose the Appropriate Hardware Platform
Selecting the right hardware is crucial for performance and scalability.
- Robot Type: Ground robots, aerial drones, underwater vehicles.
- Modularity: Ability to upgrade sensors or processors.
- Communication: Built-in radios, Wi-Fi, or custom solutions.
- Power: Battery life and charging options.
Example: For a low-cost indoor swarm, small wheeled robots like the Kilobot or TurtleBot can be ideal due to their modularity and ease of programming.
Step 3: Develop or Select Control Algorithms
Control algorithms govern how your swarm behaves and coordinates.
- Behavioral Models: Flocking, foraging, formation control.
- Communication Protocols: Centralized, decentralized, or hybrid.
- Fault Tolerance: Handling robot failures gracefully.
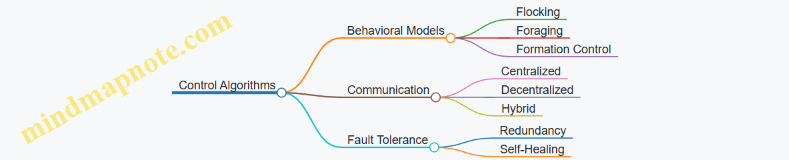
Example: Implementing a decentralized flocking algorithm using the Boids model allows robots to maintain formation without a central controller.
Step 4: Simulation and Testing
Before real-world deployment, simulate your swarm to identify issues early.
- Simulation Tools: Gazebo, Webots, ARGoS.
- Scenario Design: Realistic environments and tasks.
- Performance Metrics: Coverage, energy consumption, communication overhead.
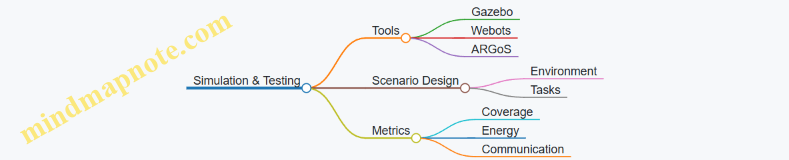
Example: Use Gazebo to simulate a drone swarm performing area coverage in a virtual farm field, measuring battery usage and communication delays.
Step 5: Implement Communication and Networking
Reliable communication is the backbone of swarm coordination.
- Network Topology: Mesh, star, or hybrid.
- Protocols: MQTT, ROS topics, custom UDP/TCP.
- Latency and Bandwidth: Optimize for your application needs.
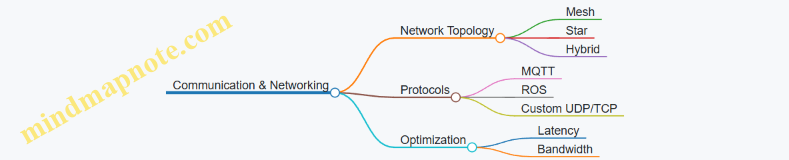
Example: A mesh network using Wi-Fi Direct can enable drones to communicate directly without a central access point, improving robustness.
Step 6: Develop Localization and Mapping Capabilities
Accurate positioning is essential for coordinated tasks.
- Localization Techniques: GPS, visual odometry, UWB.
- Mapping: SLAM for unknown environments.
- Cooperative Localization: Sharing position data among robots.
Example: Use cooperative SLAM where drones share their local maps to build a comprehensive environment map in real-time.
Step 7: Plan for Safety and Fail-Safe Mechanisms
Safety ensures your swarm operates reliably and ethically.
- Collision Avoidance: Sensors and algorithms.
- Emergency Protocols: Return to base, hover, or shutdown.
- Ethical Considerations: Privacy, data security.
Example: Equip drones with ultrasonic sensors and program reactive collision avoidance to prevent mid-air collisions.
Step 8: Deployment and Iterative Improvement
Deploy your swarm in controlled environments first, then scale up.
- Pilot Tests: Small-scale real-world trials.
- Data Collection: Monitor performance and failures.
- Iterate: Refine hardware, software, and algorithms based on feedback.
Example: Start with 5 drones in a warehouse to test navigation and communication before scaling to 20 units.
Summary Mind Map
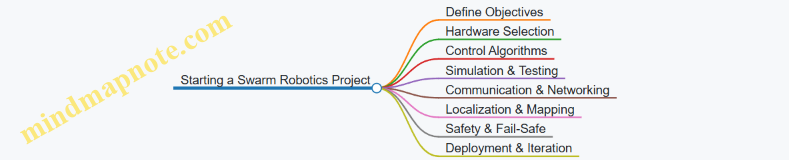
By following these guidelines, you can systematically approach your swarm robotics project, minimizing risks and maximizing the chances of success. Remember, iterative development and testing are key — start simple, learn from each phase, and progressively build complexity.
Additional Resources
- Kilobot Project: Low-cost swarm robot platform.
- ROS (Robot Operating System): Middleware for robot software development.
- Gazebo Simulator: 3D robotics simulator.
- Boids Algorithm Explanation: Classic flocking behavior model.
Example Project Starter: Simple Indoor Robot Swarm
- Objective: Area coverage and mapping in an indoor environment.
- Hardware: 10 small wheeled robots with IR sensors.
- Control: Decentralized flocking algorithm.
- Communication: Bluetooth mesh network.
- Localization: Dead reckoning with occasional beacon corrections.
- Simulation: Use Webots to validate behaviors before deployment.
This example illustrates a manageable entry point into swarm robotics with clear goals and achievable technology.
Starting your own swarm robotics project is a journey of discovery and innovation. With structured planning and adherence to best practices, you can unlock the transformative potential of autonomous swarms.
13.4 Resources for Continued Learning and Community Engagement
As the field of autonomous swarms continues to evolve rapidly, staying updated with the latest research, tools, and community insights is crucial for robotics engineers, control engineers, and applied researchers. This section provides a curated list of resources, including online courses, research hubs, open-source projects, conferences, and active communities. Additionally, mind maps are included to help visualize pathways for learning and engagement.
Online Learning Platforms and Courses
- Coursera: Courses like “Swarm Robotics” by University of Pennsylvania, “Robotics Specialization” by University of Pennsylvania, and “Control of Mobile Robots” by Georgia Tech.
- edX: “Robotics MicroMasters” by University of Pennsylvania.
- Udacity: “Robotics Software Engineer Nanodegree” focusing on ROS and autonomous systems.
- MIT OpenCourseWare: “Distributed Robotics” and “Control of Autonomous Robots”.
Example:
- Enroll in “Swarm Robotics” on Coursera to learn foundational algorithms with hands-on Python simulations.
Key Research Journals and Publications
- IEEE Transactions on Robotics
- Swarm Intelligence Journal
- Autonomous Robots Journal
- Robotics and Autonomous Systems
- Frontiers in Robotics and AI
Example:
- Follow recent papers on decentralized control algorithms and their experimental validations.
Open-Source Software and Simulation Tools
- ROS (Robot Operating System): Framework widely used for robot software development.
- Gazebo Simulator: 3D robotics simulator integrated with ROS.
- Webots: Open-source robot simulator supporting swarm robotics.
- ARGoS: Simulator designed specifically for large-scale swarm robotics.
- SwarmLab: MATLAB toolbox for swarm intelligence algorithms.
Example:
- Use ARGoS to simulate a 100-robot swarm performing collective foraging.
Conferences and Workshops
- International Conference on Robotics and Automation (ICRA)
- International Conference on Intelligent Robots and Systems (IROS)
- Swarm Intelligence Symposium
- Distributed Autonomous Robotic Systems (DARS)
- Robotics: Science and Systems (RSS)
Example:
- Attend ICRA workshops focused on multi-robot systems to network and learn about cutting-edge swarm control techniques.
Online Communities and Forums
- ROS Discourse and Answers
- Reddit r/robotics and r/swarmrobotics
- Stack Exchange Robotics
- GitHub repositories and discussions on swarm projects
- LinkedIn Groups: Swarm Robotics and Autonomous Systems
Example:
- Participate in GitHub discussions on swarm navigation algorithms to get feedback and collaborate.
Mind Maps for Learning and Engagement
Mind Map 1: Learning Pathway for Autonomous Swarms
Mind Map 2: Community Engagement Opportunities
Mind Map 3: Tools and Resources Overview
Example: Integrating Resources into a Learning Project
Scenario: You want to develop a small drone swarm capable of cooperative search.
- Start with the “Swarm Robotics” course on Coursera to understand algorithms.
- Use ROS and Gazebo to simulate the swarm behavior.
- Join ROS Discourse and Reddit r/swarmrobotics to ask questions and share progress.
- Read recent papers from IEEE Transactions on Robotics for state-of-the-art methods.
- Attend ICRA workshops to network and get feedback.
- Contribute improvements back to an open-source drone swarm project on GitHub.
By leveraging these resources and engaging with the community, engineers and researchers can accelerate their expertise, contribute to the field, and stay at the forefront of autonomous swarm technology.
13.5 Final Thoughts: Building the Future of Collective Intelligence
As we conclude this comprehensive exploration of autonomous swarms, drones, robots, and collective intelligence, it is essential to reflect on the transformative potential these technologies hold for the future. Collective intelligence, inspired by natural systems, empowers groups of relatively simple agents to perform complex tasks through cooperation, adaptability, and emergent behavior. Engineering such systems requires a multidisciplinary approach, combining robotics, control theory, AI, communication, and ethics.
The Vision Ahead
The future of collective intelligence lies in creating swarms that are not only autonomous but also context-aware, resilient, and capable of seamless human collaboration. These swarms will operate in diverse environments — from smart cities and agriculture to disaster zones and space exploration — enhancing efficiency, safety, and innovation.
Key Pillars for Building Future Swarms
Example: Human-Swarm Collaborative Disaster Response
Imagine a post-earthquake scenario where a heterogeneous swarm of aerial drones and ground robots collaborates with human responders to locate survivors and assess structural damage. The drones provide aerial mapping and thermal imaging, while ground robots navigate rubble to deliver supplies or relay communications. The swarm adapts dynamically to changing conditions, sharing data in real-time, and prioritizing tasks based on human input.
This example highlights several future-focused best practices:
- Multi-Modal Swarms: Combining different robot types for complementary capabilities.
- Human-Swarm Interaction: Interfaces allowing humans to guide swarm behavior without micromanagement.
- Adaptive Algorithms: Real-time decision-making to handle unpredictable environments.
- Fail-Safe Mechanisms: Ensuring safety and reliability under critical conditions.
Mind Map: Components of a Resilient Autonomous Swarm
Practical Steps for Robotics Engineers and Researchers
- Embrace Interdisciplinary Collaboration: Future swarms require expertise from AI, hardware design, control systems, and human factors.
- Prioritize Scalability and Modularity: Design systems that can grow and adapt to new tasks and environments.
- Invest in Simulation and Real-World Testing: Bridge the gap between theory and practice through iterative development.
- Incorporate Ethical Frameworks Early: Address privacy, safety, and societal impact proactively.
- Engage with Regulatory Bodies: Stay informed and contribute to shaping policies that govern autonomous swarms.
Final Example: Smart City Swarm Integration
In smart cities, autonomous swarms could manage traffic flow, perform infrastructure inspections, and assist in emergency services. For instance, a swarm of drones might monitor air quality, while ground robots handle waste collection, all coordinated through edge computing nodes to ensure low-latency responses.
This vision requires:
- Seamless integration with urban infrastructure.
- Robust communication protocols to handle dense environments.
- AI-driven task allocation balancing efficiency and fairness.
Closing Remarks
Building the future of collective intelligence is an exciting journey filled with challenges and opportunities. By applying best practices, learning from nature, and fostering innovation, robotics engineers, control engineers, and applied researchers can pioneer autonomous swarms that transform industries and improve lives worldwide.
Let us continue to push the boundaries of what collective intelligence can achieve — together.