Soft Robotics Design for Medical and Wearable Devices
1. Introduction to Soft Robotics in Medical and Wearable Devices
1.1 Overview of Soft Robotics: Principles and Materials
Soft robotics is an emerging subfield of robotics focused on creating robots from highly compliant materials, mimicking the flexibility and adaptability found in living organisms. Unlike traditional rigid robots, soft robots use materials such as elastomers, gels, and textiles, enabling safer human-robot interaction, enhanced adaptability, and novel functionalities especially suited for medical and wearable applications.
Core Principles of Soft Robotics
- Compliance and Flexibility: Soft robots deform easily to adapt to complex environments and delicate tasks.
- Continuum Structures: Instead of discrete joints, soft robots often have continuous deformable bodies.
- Safe Human Interaction: Soft materials reduce injury risk, crucial in medical and wearable devices.
- Bioinspiration: Designs often draw from natural organisms like octopuses, worms, or human muscles.
Mind Map: Principles of Soft Robotics
Key Materials Used in Soft Robotics
-
Elastomers (e.g., Silicone Rubber, Polyurethane)
- Highly stretchable and resilient
- Used for actuators, skins, and flexible joints
- Example: Dragon Skin silicone used in soft robotic grippers
-
Hydrogels
- Water-swollen polymer networks
- Biocompatible and stimuli-responsive
- Example: Hydrogel patches for drug delivery and soft sensors
-
Textiles and Fabrics
- Flexible, breathable, and wearable
- Integrated with sensors or actuators
- Example: Soft exosuits using fabric-based pneumatic actuators
-
Shape Memory Polymers and Alloys
- Change shape with temperature or electrical input
- Useful for compact actuation
- Example: Shape memory alloy wires used in minimally invasive surgical tools
-
Electroactive Polymers (EAPs)
- Change shape or size when electrically stimulated
- Lightweight and silent operation
- Example: EAP-based artificial muscles for prosthetics
Mind Map: Materials in Soft Robotics
Example: Soft Robotic Glove for Rehabilitation
A soft robotic glove uses silicone elastomer actuators that inflate pneumatically to assist finger flexion and extension. The glove’s soft materials conform to the user’s hand, providing gentle assistance without restricting natural movement. Embedded flexible sensors monitor finger position and force, enabling adaptive control.
- Materials: Dragon Skin silicone for actuators, flexible strain sensors
- Principles: Compliance for comfort, continuum actuation for natural motion
- Outcome: Improved hand function in stroke patients with reduced discomfort
Summary
Understanding the fundamental principles and materials of soft robotics is essential for designing effective medical and wearable devices. The combination of compliant materials and bioinspired design enables innovations that traditional rigid robotics cannot achieve, particularly in sensitive and dynamic environments like the human body.
1.2 Importance of Soft Robotics in Medical and Wearable Applications
Soft robotics is revolutionizing the medical and wearable device landscape by introducing systems that are inherently compliant, adaptable, and safe for human interaction. Unlike traditional rigid robots, soft robots use flexible materials and structures that mimic biological tissues, enabling more natural and comfortable integration with the human body.
Why Soft Robotics Matters in Medical and Wearable Fields
- Enhanced Patient Comfort and Safety: Soft robots reduce the risk of injury and discomfort due to their compliance and gentle interaction with human tissue.
- Improved Adaptability: Their flexibility allows devices to conform to complex and dynamic body shapes, enhancing functionality in diverse patient populations.
- Increased Functionality: Soft actuators and sensors can replicate natural muscle movements, enabling more intuitive assistive devices.
- Minimally Invasive Procedures: Soft robotic tools can navigate delicate anatomical structures with reduced trauma.
Mind Map: Key Benefits of Soft Robotics in Medical and Wearable Devices
Example 1: Soft Robotic Glove for Rehabilitation
A soft robotic glove designed for stroke patients assists hand movement by using pneumatic actuators made from silicone. The glove’s soft materials conform to the user’s hand, providing assistance without restricting natural motion. This improves patient comfort and encourages longer therapy sessions, leading to better recovery outcomes.
Mind Map: Soft Robotic Glove Features
Example 2: Wearable Soft Exosuit for Mobility Assistance
Soft exosuits use textile-based soft actuators to assist walking in individuals with mobility impairments. Unlike rigid exoskeletons, these suits are lightweight and unobtrusive, allowing users to wear them comfortably for extended periods. The soft design reduces pressure points and adapts to body movements, improving user compliance and effectiveness.
Mind Map: Wearable Soft Exosuit Advantages
Summary
Soft robotics plays a critical role in advancing medical and wearable technologies by offering solutions that prioritize human-centric design. The ability to create devices that are safe, adaptable, and functional opens new possibilities for patient care, rehabilitation, and continuous health monitoring. As the field progresses, integrating soft robotics principles will be essential for developing next-generation medical devices that truly enhance quality of life.
1.3 Key Challenges and Opportunities in Soft Robotics Design
Soft robotics is an exciting and rapidly evolving field, especially in medical and wearable devices, but it comes with unique challenges and equally compelling opportunities. Understanding these aspects is crucial for mechanical engineers, biomedical engineers, and device developers aiming to innovate in this space.
Key Challenges in Soft Robotics Design
-
Material Limitations
- Soft materials often have limited load-bearing capacity and durability compared to rigid materials.
- Biocompatibility and long-term stability in medical environments can be difficult to achieve.
-
Complex Modeling and Simulation
- Soft robots exhibit nonlinear, highly deformable behaviors that are challenging to model accurately.
- Traditional rigid-body kinematics and dynamics do not apply, requiring advanced finite element analysis and continuum mechanics.
-
Actuation and Control Complexity
- Soft actuators such as pneumatic or hydraulic systems require bulky pumps or compressors, limiting portability.
- Precise control is difficult due to the compliant nature and hysteresis of soft materials.
-
Sensor Integration
- Embedding sensors without compromising flexibility or adding bulk is challenging.
- Signal noise and drift in flexible sensors can affect reliability.
-
Fabrication and Scalability
- Manufacturing soft robots with consistent quality and repeatability is complex.
- Multi-material fabrication and integration of electronics remain difficult at scale.
-
Regulatory and Safety Concerns
- Medical soft devices must meet strict regulatory standards, which can be hard to navigate given novel materials and designs.
- Ensuring patient safety with soft, dynamic devices requires rigorous testing.
Opportunities in Soft Robotics Design
-
Enhanced Patient Comfort and Compliance
- Soft, flexible devices conform better to human anatomy, improving comfort and wearability.
- Example: Soft robotic gloves that assist hand movement without restricting natural motion.
-
Improved Safety in Human-Robot Interaction
- Soft robots reduce risk of injury due to their compliant nature.
- Example: Wearable exosuits that support mobility without rigid frames.
-
New Therapeutic and Diagnostic Capabilities
- Soft robots can access delicate tissues or provide gentle assistance in rehabilitation.
- Example: Soft robotic catheters that navigate vascular systems with minimal trauma.
-
Customization and Adaptability
- Soft materials allow for personalized devices tailored to individual patient anatomy.
- Example: 3D printed soft orthotic devices customized to a patient’s limb.
-
Integration with Emerging Technologies
- Combining soft robotics with bioelectronics, AI, and wearable sensors opens new frontiers.
- Example: Smart soft patches that monitor vital signs and provide therapeutic actuation.
Mind Maps
Mind Map 1: Challenges in Soft Robotics Design
Mind Map 2: Opportunities in Soft Robotics Design
Examples Illustrating Challenges and Opportunities
-
Soft Robotic Glove for Rehabilitation
- Challenge: Designing actuators that assist finger movement without bulk.
- Opportunity: Enables stroke patients to regain hand function comfortably.
-
Pneumatic Soft Exosuit
- Challenge: Integrating pneumatic actuators with portable air supply.
- Opportunity: Provides mobility assistance with lightweight, flexible design.
-
Soft Robotic Catheter
- Challenge: Navigating complex vascular pathways without damaging tissue.
- Opportunity: Minimally invasive surgery with enhanced precision and safety.
-
Wearable Soft Sensor Patch
- Challenge: Embedding sensors that maintain flexibility and signal integrity.
- Opportunity: Continuous health monitoring with real-time feedback.
By addressing these challenges through innovative design, material science, and interdisciplinary collaboration, the field of soft robotics holds tremendous promise to revolutionize medical and wearable devices, enhancing patient outcomes and quality of life.
1.4 Case Study: Soft Robotic Gloves for Rehabilitation
Soft robotic gloves represent a transformative approach in rehabilitation technology, offering patients enhanced dexterity, strength, and mobility through compliant, adaptable designs. This case study explores the design, functionality, and impact of soft robotic gloves used in hand rehabilitation, particularly for stroke survivors and individuals with motor impairments.
Overview
Soft robotic gloves are wearable devices constructed from flexible materials and actuated by soft actuators such as pneumatic chambers or shape memory alloys. They assist users in performing hand movements by augmenting or restoring finger flexion and extension.
Design Objectives
- Comfort and Wearability: Lightweight, breathable materials that conform to the hand’s anatomy.
- Assistive Functionality: Provide sufficient force to aid finger movement without restricting natural motion.
- Safety: Soft materials reduce risk of injury or discomfort.
- Sensor Integration: Monitor finger position and force for feedback and control.
Mind Map: Key Components of Soft Robotic Gloves
Example: Pneumatic Soft Robotic Glove
- Materials: Multi-layer silicone elastomer with embedded air chambers.
- Actuation: Pneumatic inflation causes bending of finger actuators to assist flexion.
- Sensors: Embedded flex sensors track finger bending angles.
- Control: Closed-loop system adjusts air pressure based on sensor feedback.
This design allows patients to perform grasping motions with assistance, promoting neuroplasticity and muscle strengthening.
Mind Map: Rehabilitation Workflow with Soft Robotic Gloves
Best Practices Illustrated by the Soft Robotic Glove Case
- User-Centered Design: Iterative prototyping with patient feedback ensures comfort and usability.
- Modular Actuation: Using independent actuators per finger allows customized assistance.
- Sensor Fusion: Combining multiple sensor types improves accuracy of motion tracking.
- Safety Mechanisms: Pressure limits and soft materials prevent overextension or injury.
- Data-Driven Therapy: Real-time monitoring enables adaptive therapy tailored to patient progress.
Additional Example: Cable-Driven Soft Glove
- Employs flexible cables routed through fabric channels to mimic tendon action.
- Actuators pull cables to flex fingers; springs or elastic materials assist extension.
- Advantages include lower power consumption and simpler pneumatic requirements.
Summary
Soft robotic gloves exemplify how compliant materials and innovative actuation can create effective rehabilitation tools. By integrating sensors and control systems, these devices provide personalized assistance that adapts to patient needs, enhancing recovery outcomes.
References for Further Reading
- Polygerinos, P., et al. “Soft robotic glove for combined assistance and at-home rehabilitation.” Robotics and Autonomous Systems, 2015.
- Yap, H.K., et al. “A soft exoskeleton for hand assistive and rehabilitation application using pneumatic actuators with variable stiffness.” Frontiers in Robotics and AI, 2017.
2. Material Selection and Characterization for Soft Robotics
2.1 Elastomers and Silicone Rubbers: Properties and Suitability
Soft robotics relies heavily on materials that can mimic the flexibility and compliance of biological tissues. Elastomers and silicone rubbers are among the most widely used materials in this domain due to their unique mechanical and chemical properties. This section explores their characteristics, advantages, limitations, and practical examples in medical and wearable device design.
What Are Elastomers?
Elastomers are polymers with viscoelasticity, generally having low Young’s modulus and high failure strain compared to other materials. They can undergo significant deformation and return to their original shape, making them ideal for soft robotics.
Silicone Rubbers
Silicone rubbers are a subset of elastomers composed of silicon, oxygen, carbon, and hydrogen. They offer excellent thermal stability, biocompatibility, and chemical resistance, which makes them especially suitable for medical applications.
Key Properties of Elastomers and Silicone Rubbers
- Elasticity: Ability to stretch and recover without permanent deformation.
- Tear Resistance: Important for durability in wearable devices.
- Biocompatibility: Essential for medical devices in contact with human tissue.
- Chemical Stability: Resistance to bodily fluids and sterilization processes.
- Thermal Stability: Maintains properties across a wide temperature range.
- Permeability: Gas and moisture permeability can affect device performance.
Mind Map: Properties of Elastomers and Silicone Rubbers
Suitability in Medical and Wearable Devices
| Property | Importance in Medical/Wearable Devices | Example Application |
|---|---|---|
| Biocompatibility | Prevents adverse reactions when in contact with skin or internal tissue | Soft robotic glove for hand therapy |
| Elasticity | Enables natural movement and comfort | Soft exosuit joints |
| Tear Resistance | Ensures durability during repeated use | Wearable sensors embedded in sleeves |
| Chemical Stability | Allows sterilization and exposure to bodily fluids | Implantable soft robotic devices |
| Thermal Stability | Maintains performance in varying environments | Wearable devices used outdoors |
Example 1: Soft Robotic Glove Using Silicone Rubber
A rehabilitation glove designed to assist stroke patients uses a silicone rubber elastomer for its soft actuators. The material’s elasticity allows the glove to conform to different hand sizes and provide gentle assistance during finger flexion and extension. Its biocompatibility ensures patient safety during prolonged use.
Example 2: Elastomer-Based Soft Exosuit
In a wearable soft exosuit aimed at augmenting lower limb strength, elastomers with high tear resistance are used to fabricate flexible joints and straps. This ensures the device can withstand repetitive motion cycles without failure, while maintaining wearer comfort.
Mind Map: Selecting Elastomers and Silicone Rubbers for Soft Robotics
Best Practice Tips
- Match material properties to application needs: For example, prioritize biocompatibility and softness for wearable skin-contact devices.
- Test materials under realistic conditions: Simulate repeated stretching, exposure to sweat, and sterilization cycles.
- Consider hybrid materials: Combining silicone rubbers with reinforcing fibers or coatings can enhance durability without sacrificing flexibility.
- Prototype early and iterate: Use rapid molding techniques to test different elastomer formulations quickly.
Summary
Elastomers and silicone rubbers are foundational materials in soft robotics for medical and wearable devices due to their flexibility, biocompatibility, and durability. Understanding their properties and suitability helps engineers design devices that are both functional and safe. Integrating these materials thoughtfully with design and fabrication processes leads to successful soft robotic solutions.
2.2 Hydrogels and Smart Materials in Medical Devices
Soft robotics increasingly leverages hydrogels and smart materials due to their unique properties such as high water content, biocompatibility, and stimuli-responsiveness. These materials enable the design of medical devices that can adapt, heal, or respond dynamically to physiological environments.
What are Hydrogels?
Hydrogels are three-dimensional polymer networks capable of holding large amounts of water while maintaining structural integrity. Their softness and flexibility make them ideal for interfacing with biological tissues.
Key Properties:
- High water content (up to 90% or more)
- Biocompatibility
- Tunable mechanical properties
- Permeability to oxygen and nutrients
Example: Hydrogel-based wound dressings that maintain a moist environment to accelerate healing.
Smart Materials Overview
Smart materials can change their properties in response to external stimuli such as temperature, pH, electric or magnetic fields, and light. In medical soft robotics, these materials enable active actuation, sensing, or drug delivery.
Common Smart Materials:
- Thermoresponsive polymers
- pH-sensitive hydrogels
- Electroactive polymers (EAPs)
- Shape memory polymers (SMPs)
Mind Map: Hydrogels and Smart Materials in Medical Devices
Applications in Soft Robotics for Medical Devices
Hydrogel-Based Soft Actuators
Hydrogels can swell or shrink in response to stimuli, enabling actuation without rigid components.
Example: A hydrogel actuator that bends when exposed to a change in pH, useful for minimally invasive surgical tools that adapt to tissue environments.
Drug Delivery Systems
Smart hydrogels can release drugs in response to specific triggers such as temperature or glucose levels.
Example: Glucose-sensitive hydrogel patches that release insulin in diabetic patients only when glucose levels rise.
Wearable Sensors
Hydrogels integrated with conductive materials can serve as flexible, stretchable sensors for monitoring physiological signals.
Example: Hydrogel-based strain sensors embedded in soft robotic sleeves to monitor joint movement during rehabilitation.
Mind Map: Example - Hydrogel Actuator Design
Best Practices for Using Hydrogels and Smart Materials
- Material Compatibility: Ensure hydrogels and smart materials are compatible with human tissue and device components.
- Stimuli Selection: Choose stimuli that are safe and practical for the intended medical environment.
- Mechanical Matching: Tune mechanical properties to match surrounding tissues to avoid discomfort or damage.
- Integration: Design interfaces for seamless integration with electronics or other robotic components.
- Testing: Perform thorough biocompatibility and durability testing under physiological conditions.
Real-World Example: Soft Hydrogel-Based Artificial Muscle
Researchers developed a hydrogel artificial muscle that contracts when electrically stimulated. This actuator mimics natural muscle behavior and can be used in wearable exosuits to assist patients with muscle weakness.
- Uses a polyacrylamide hydrogel infused with conductive polymers.
- Electrically induced ion migration causes volume change and contraction.
- Demonstrates smooth, silent actuation suitable for wearable medical devices.
This example highlights how combining hydrogels with smart material properties can create innovative soft robotic components tailored for medical applications.
Summary
Hydrogels and smart materials form a cornerstone of soft robotics design in medical and wearable devices. Their unique ability to respond to physiological stimuli, combined with biocompatibility and mechanical flexibility, enables the creation of adaptive, patient-friendly devices. By understanding their properties, applications, and integration methods, engineers can design next-generation soft robotic systems that improve patient outcomes and comfort.
2.3 Biocompatibility and Safety Considerations
Designing soft robotics for medical and wearable devices demands rigorous attention to biocompatibility and safety to ensure patient well-being and regulatory compliance. This section explores key factors, testing methods, and practical examples to guide engineers and developers.
Understanding Biocompatibility
Biocompatibility refers to the ability of a material to perform with an appropriate host response in a specific application. For soft robotics in medical devices, this means materials and components must not cause adverse reactions such as toxicity, inflammation, or allergic responses.
Mind Map: Biocompatibility Factors
Safety Considerations in Soft Robotics
Safety encompasses not only biocompatibility but also mechanical and functional safety to prevent harm during device operation.
Key Safety Aspects:
- Mechanical Safety: Avoiding pinching, excessive pressure, or sharp edges.
- Electrical Safety: Safe integration of sensors and actuators with minimal risk of shocks.
- Thermal Safety: Preventing overheating of actuators or electronics.
- Reliability: Ensuring consistent performance without sudden failures.
Mind Map: Safety Considerations
Testing for Biocompatibility and Safety
Common Tests:
- Cytotoxicity Tests: Assess if materials release toxic substances affecting cell viability.
- Sensitization and Irritation Tests: Evaluate allergic or inflammatory responses on skin or tissues.
- Hemocompatibility: Important for devices contacting blood, assessing clotting and hemolysis.
- Mechanical Testing: Fatigue, tensile strength, and wear resistance.
- Electrical Safety Tests: Leakage current, insulation resistance.
Example:
A soft robotic sleeve designed for long-term wear on the arm underwent ISO 10993 biocompatibility testing, including skin irritation and sensitization assays. The silicone elastomer used was certified medical-grade, ensuring minimal risk of allergic reactions.
Practical Example: Selecting Biocompatible Materials for a Soft Robotic Glove
- Material Choice: Platinum-cured silicone rubber (e.g., Ecoflex, Dragon Skin) known for excellent biocompatibility and flexibility.
- Surface Treatment: Applying a thin, biocompatible coating to reduce friction and skin irritation.
- Testing: Conducting patch tests on volunteers for 48 hours to monitor skin response.
This approach ensures the glove can be worn for extended rehabilitation sessions without discomfort or adverse effects.
Design Strategies to Enhance Safety and Biocompatibility
- Use medical-grade materials with established biocompatibility certifications.
- Minimize material degradation by selecting stable polymers and avoiding harmful additives.
- Design for easy cleaning and sterilization to prevent infection.
- Incorporate soft interfaces and padding to reduce mechanical stress on tissues.
- Integrate sensors to monitor temperature and pressure, enabling automatic shutdown if unsafe conditions are detected.
Mind Map: Design Strategies
Summary
Biocompatibility and safety are foundational pillars in the design of soft robotics for medical and wearable devices. By understanding biological responses, rigorously testing materials and devices, and implementing thoughtful design strategies, developers can create effective, safe, and user-friendly soft robotic solutions.
References & Further Reading
- ISO 10993: Biological evaluation of medical devices
- “Biocompatibility of Silicone Materials” – Journal of Biomedical Materials Research
- “Safety Considerations in Soft Robotics” – IEEE Robotics & Automation Magazine
2.4 Practical Example: Selecting Materials for a Soft Exosuit
Selecting the right materials for a soft exosuit is critical to achieving the desired balance between flexibility, durability, comfort, and functionality. This section walks through the decision-making process with practical examples and mind maps to illustrate key considerations.
Step 1: Define Application Requirements
Before selecting materials, clearly outline the exosuit’s functional requirements:
- Flexibility: Must allow natural joint movement without restriction.
- Strength: Should withstand repeated mechanical stress.
- Weight: Lightweight materials to reduce user fatigue.
- Biocompatibility: Safe for prolonged skin contact.
- Durability: Resistant to wear, sweat, and environmental factors.
- Actuation Compatibility: Compatible with pneumatic, hydraulic, or other actuation methods.
Mind Map: Application Requirements for Soft Exosuit
Step 2: Material Categories Overview
Common material categories used in soft exosuits include:
- Elastomers (e.g., Silicone, TPU): Highly flexible and stretchable.
- Fabrics (e.g., Nylon, Spandex): Provide structural support and breathability.
- Foams: Cushioning and comfort.
- Smart Materials (e.g., Shape Memory Polymers): For adaptive stiffness or actuation.
Mind Map: Material Categories
Step 3: Evaluate Material Properties Against Requirements
| Material | Flexibility | Strength | Weight | Biocompatibility | Durability | Actuation Compatibility | Example Use Case |
|---|---|---|---|---|---|---|---|
| Silicone Elastomer | High | Medium | Low | Excellent | Good | Excellent (Pneumatic) | Soft pneumatic actuators |
| Thermoplastic Polyurethane (TPU) | Medium | High | Low | Good | Excellent | Good | Flexible joints and reinforcements |
| Nylon Fabric | Low | High | Low | Good | Excellent | Moderate | Structural layers, straps |
| Spandex Fabric | High | Medium | Low | Good | Moderate | Moderate | Stretchable coverings |
| Polyurethane Foam | Low | Low | Very Low | Good | Moderate | Low | Padding and comfort layers |
| Shape Memory Polymer | Medium | Medium | Medium | Variable | Variable | High | Adaptive stiffness components |
Step 4: Practical Example - Material Selection for a Knee Soft Exosuit
Scenario: Designing a soft exosuit to assist knee extension during walking.
Material Choices:
- Actuator Bladders: Silicone elastomer chosen for its high flexibility and pneumatic compatibility.
- Structural Support: TPU films layered with nylon fabric to provide strength and durability.
- Comfort Layer: Spandex fabric for skin contact areas to ensure stretch and breathability.
- Padding: Polyurethane foam inserts around pressure points.
Rationale:
- Silicone elastomer allows smooth inflation and deflation of pneumatic actuators.
- TPU and nylon combination ensures the suit can withstand mechanical loads without tearing.
- Spandex provides a comfortable fit that moves with the user.
- Foam cushions reduce pressure and increase user comfort.
Mind Map: Knee Soft Exosuit Material Selection
Step 5: Testing and Iteration
After initial material selection, prototype samples should undergo:
- Mechanical Testing: Tensile, fatigue, and compression tests.
- User Trials: Assess comfort, fit, and functionality.
- Environmental Exposure: Sweat, temperature, and abrasion resistance.
Example: A prototype knee exosuit was tested with silicone actuators inflated repeatedly for 10,000 cycles, showing minimal degradation. User feedback highlighted the need for softer padding, leading to foam density adjustments.
Summary
Selecting materials for a soft exosuit involves balancing multiple factors including mechanical properties, user comfort, and compatibility with actuation methods. Using a structured approach supported by mind maps and real-world examples helps engineers make informed decisions that optimize device performance and user experience.
2.5 Testing and Characterization Techniques for Soft Materials
Testing and characterizing soft materials is crucial to ensure their performance, durability, and safety in medical and wearable soft robotics applications. Due to their flexible, compliant nature, soft materials require specialized testing methods that capture their mechanical, chemical, and biocompatible properties.
Key Testing Categories for Soft Materials
Mechanical Testing
Tensile Testing: Measures the material’s response to uniaxial stretching, providing data on ultimate tensile strength, elongation at break, and Young’s modulus.
Example: Testing a silicone elastomer used in a soft robotic glove to ensure it can stretch sufficiently without tearing during hand movements.
Compression Testing: Evaluates how the material behaves under compressive loads, important for wearable devices that experience pressure.
Example: Assessing a soft exosuit’s padding material to verify comfort and durability under repeated body weight loads.
Cyclic Fatigue Testing: Repeated loading and unloading to simulate real-world use and identify failure points.
Example: Simulating thousands of bending cycles on a soft actuator to ensure longevity.
Tear and Puncture Resistance: Determines the material’s ability to resist damage from sharp objects or stress concentrators.
Example: Testing a soft robotic sleeve for resistance against accidental scratches or punctures during daily wear.
Rheological and Viscoelastic Characterization
Dynamic Mechanical Analysis (DMA): Measures storage and loss moduli to understand elasticity and damping properties over a range of frequencies and temperatures.
Example: Characterizing a hydrogel used in a wearable sensor to optimize its response time and mechanical comfort.
Stress Relaxation and Creep Tests: Evaluate how the material relaxes stress under constant strain or deforms over time under constant load.
Example: Ensuring a soft actuator maintains its shape and force output during prolonged use.
Surface and Chemical Characterization
Surface Energy and Wettability: Determines how the material interacts with liquids, which affects adhesion and biocompatibility.
Example: Measuring contact angles on a silicone surface to optimize bonding with embedded sensors.
Chemical Composition Analysis: Techniques like FTIR or XPS identify material composition and detect contaminants.
Example: Verifying purity of elastomers to prevent adverse reactions in medical applications.
Biocompatibility and Safety Testing
Cytotoxicity Tests: Assess if the material releases harmful substances affecting cell viability.
Example: Testing a soft robotic implant material to ensure it does not harm surrounding tissue.
In Vitro and In Vivo Compatibility: Longer-term studies to evaluate immune response and integration.
Example: Implantation of a soft robotic catheter material in animal models to monitor inflammation.
Environmental and Aging Tests
Temperature and Humidity Exposure: Simulates real-world conditions to assess material stability.
Example: Testing a wearable device’s silicone components for performance after sweating and temperature fluctuations.
UV and Chemical Resistance: Ensures materials withstand sterilization and exposure to cleaning agents.
Example: Evaluating a soft robotic prosthetic cover for UV degradation after outdoor use.
Mind Map: Mechanical Testing Techniques
Mind Map: Biocompatibility Testing Workflow
Integrated Example: Testing a Soft Robotic Glove Material
- Material: Silicone elastomer with embedded flexible sensors.
- Mechanical Testing: Tensile and cyclic fatigue tests to ensure flexibility and durability during repetitive hand motions.
- Rheological Testing: DMA to optimize damping properties for user comfort.
- Surface Characterization: Contact angle measurements to improve sensor adhesion.
- Biocompatibility: Cytotoxicity tests to guarantee skin safety.
- Environmental Testing: Humidity exposure to simulate sweat conditions.
This comprehensive testing approach ensures the glove performs reliably, safely, and comfortably in real-world rehabilitation scenarios.
Summary
Testing and characterization of soft materials require a multidisciplinary approach combining mechanical, chemical, biological, and environmental assessments. Employing these techniques early and iteratively in the design process helps biomedical engineers and device developers create safe, effective, and durable soft robotic medical and wearable devices.
3. Design Principles and Modeling Techniques
3.1 Fundamental Design Strategies for Soft Actuators
Soft actuators are the heart of soft robotics, enabling compliant, adaptable, and safe interaction with humans and delicate environments. Designing effective soft actuators requires a deep understanding of materials, geometry, and actuation principles to achieve desired motion and force outputs.
Key Design Strategies for Soft Actuators
- Material Selection: Choosing elastomers, silicones, or smart materials based on flexibility, durability, and biocompatibility.
- Geometry and Structure: Designing shapes that amplify deformation, such as chambers, folds, or fiber reinforcements.
- Actuation Mechanism: Pneumatic, hydraulic, thermal, or electrical stimuli to induce motion.
- Control and Feedback: Integrating sensors and control algorithms for precise actuation.
Mind Map: Fundamental Design Strategies for Soft Actuators
Strategy 1: Material Selection
Selecting the right material is foundational. For example, silicone rubbers like Ecoflex or Dragon Skin are widely used due to their flexibility and biocompatibility.
Example: A soft robotic glove uses Ecoflex 00-30 for its skin layer to allow natural finger bending while maintaining durability during repetitive rehabilitation exercises.
Strategy 2: Geometry and Structural Design
The actuator’s geometry determines how it deforms under actuation. Common designs include:
- Pneumatic Chambers: Inflatable pockets that expand to create bending or extension.
- Fiber Reinforcement: Wrapping fibers around chambers to constrain expansion direction, enabling controlled bending.
- Origami/Folding Patterns: Structures that fold predictably to produce complex motions.
Example: A soft exosuit uses fiber-reinforced pneumatic actuators where fibers are helically wound around chambers, causing bending when inflated, mimicking muscle contraction.
Strategy 3: Actuation Mechanisms
Choosing an actuation method depends on application needs:
- Pneumatic: Air pressure inflates chambers for motion; common due to simplicity and compliance.
- Hydraulic: Liquid-based actuation offers higher force but adds weight.
- Thermal (Shape Memory Alloys): Heat-induced contraction useful for compact designs but slower response.
- Electroactive Polymers: Electric field causes deformation; promising for silent and compact actuators.
Example: A wearable soft ankle assist device uses pneumatic actuators for lightweight, safe, and responsive assistance during walking.
Strategy 4: Control and Feedback Integration
Embedding sensors such as stretchable strain gauges or pressure sensors enables real-time feedback for precise control.
Example: A soft robotic hand integrates flexible capacitive sensors within its actuators to monitor finger position, enabling adaptive grip strength during object manipulation.
Summary Table: Design Strategies with Examples
| Strategy | Description | Example Device |
|---|---|---|
| Material Selection | Flexible, biocompatible materials | Ecoflex in soft rehabilitation gloves |
| Geometry & Structure | Pneumatic chambers with fiber reinforcement | Soft exosuit for muscle assistance |
| Actuation Mechanism | Pneumatic, hydraulic, thermal, or electrical | Pneumatic ankle assist device |
| Control & Feedback | Embedded sensors for closed-loop control | Soft robotic hand with capacitive sensors |
By combining these fundamental strategies thoughtfully, mechanical and biomedical engineers can design soft actuators tailored for specific medical and wearable applications, balancing flexibility, force output, and user comfort.
3.2 Finite Element Analysis (FEA) for Soft Robotics
Finite Element Analysis (FEA) is a critical tool in the design and optimization of soft robotic components, especially in medical and wearable devices where material deformation and complex geometries are common. FEA allows engineers to simulate mechanical behavior under various loading conditions, predict stress distributions, and optimize designs before physical prototyping.
Why FEA is Essential in Soft Robotics
- Soft robotic materials exhibit nonlinear, hyperelastic, and viscoelastic behaviors that are difficult to analyze analytically.
- Complex geometries and multi-material interfaces require detailed stress-strain analysis.
- Medical devices must ensure safety and durability under repeated use and dynamic loading.
Key Steps in Performing FEA for Soft Robotics
Material Models Commonly Used
- Neo-Hookean Model: Suitable for moderate strains in elastomers.
- Mooney-Rivlin Model: Captures nonlinear elastic behavior better than Neo-Hookean.
- Ogden Model: Handles large strains and complex material responses.
Example: For a silicone-based soft actuator, the Mooney-Rivlin model calibrated with uniaxial tensile test data provides accurate stress-strain predictions.
Example: FEA of a Soft Pneumatic Actuator
Objective: Predict deformation and stress distribution when inflated.
Process:
- Geometry: Model the actuator chambers and walls in CAD.
- Material: Assign hyperelastic material properties (Mooney-Rivlin).
- Meshing: Use fine tetrahedral mesh in thin wall regions.
- Boundary Conditions: Fix base, apply internal pressure to chambers.
- Solver: Run nonlinear static analysis.
- Results: Visualize bending curvature, identify stress concentrations.
Outcome: The FEA results guide wall thickness adjustments to prevent rupture and optimize bending angle.
Mind Map: FEA Challenges and Solutions in Soft Robotics
Best Practices for FEA in Soft Robotics
- Accurate Material Testing: Perform uniaxial, biaxial, and shear tests to obtain reliable data.
- Incremental Loading: Apply loads gradually in simulations to capture nonlinear responses.
- Mesh Sensitivity Analysis: Ensure results are mesh-independent.
- Multiphysics Coupling: Consider thermal, fluid-structure interactions if relevant.
- Iterative Design: Use FEA feedback to refine geometry and material choices.
Additional Example: Wearable Soft Exosuit Joint Simulation
- Scenario: Simulate bending of a soft robotic joint designed to assist elbow movement.
- Material: Silicone elastomer with embedded fabric reinforcements.
- FEA Focus: Analyze strain distribution on fabric to avoid tearing.
- Result: Identified stress hotspots leading to reinforcement redesign.
Summary
FEA is indispensable for designing reliable, efficient, and safe soft robotic components in medical and wearable devices. By integrating accurate material models, realistic boundary conditions, and iterative validation, engineers can predict device behavior under operational conditions and optimize designs effectively.
3.3 Kinematic Modeling of Soft Structures
Kinematic modeling is a fundamental step in designing soft robotic systems, especially for medical and wearable devices where precise motion control and predictability are critical. Unlike rigid-body robotics, soft structures exhibit continuous deformation, nonlinear behaviors, and infinite degrees of freedom, which complicate traditional kinematic approaches. This section explores the principles, techniques, and practical examples of kinematic modeling tailored for soft robotics.
Understanding Kinematics in Soft Robotics
Kinematics deals with the motion of systems without considering forces. For soft robots, this involves characterizing how soft actuators and structures deform and move in response to inputs.
Key challenges include:
- Continuum mechanics: Soft robots behave like continuous media rather than discrete joints.
- Nonlinear deformation: Large strains and nonlinear elasticity.
- Infinite DOF: Unlike rigid links, soft robots have theoretically infinite degrees of freedom.
Approaches to Kinematic Modeling
-
Piecewise Constant Curvature (PCC) Model
- Assumes the soft structure bends in segments with constant curvature.
- Simplifies the infinite DOF problem into manageable discrete segments.
-
Cosserat Rod Theory
- Treats the soft structure as a slender rod with bending, twisting, and stretching.
- Captures complex deformations with differential equations.
-
Finite Element Method (FEM) Based Kinematics
- Uses numerical methods to simulate deformation.
- Highly accurate but computationally intensive.
-
Data-Driven and Machine Learning Models
- Uses sensor data to learn deformation patterns.
- Useful when analytical models are intractable.
Mind Map: Kinematic Modeling Approaches
Example 1: PCC Model for a Soft Pneumatic Bending Actuator
Scenario: Designing a soft robotic finger that bends when pressurized.
- The finger is modeled as two segments, each with constant curvature.
- Input pressure controls curvature angles.
- Forward kinematics calculates fingertip position based on segment curvatures.
Benefits:
- Enables simple control algorithms.
- Facilitates workspace estimation.
Visualization:
Example 2: Cosserat Rod Model for a Soft Wearable Exosuit
Scenario: Modeling a soft exosuit sleeve that assists elbow flexion.
- The sleeve is approximated as a Cosserat rod.
- Differential equations describe bending and twisting under actuation.
- Enables prediction of sleeve deformation and interaction with the human arm.
Implementation:
- Solve boundary value problems numerically.
- Use model to optimize actuator placement.
Mind Map: Steps in Kinematic Modeling Workflow
Best Practices for Kinematic Modeling in Soft Medical Devices
- Start simple: Use PCC models for initial design and control.
- Validate early: Compare models with experimental data to ensure accuracy.
- Incorporate sensors: Use embedded sensors to refine models in real-time.
- Iterate: Update models as design evolves.
- Leverage software: Utilize tools like SOFA framework, Abaqus, or custom MATLAB scripts.
Summary
Kinematic modeling of soft structures is essential for predicting and controlling the motion of soft robotic medical and wearable devices. By combining analytical, numerical, and data-driven approaches, engineers can create accurate models that support design optimization and real-time control. Practical examples like the PCC model for soft fingers and Cosserat rod theory for exosuits illustrate how these models translate into real-world applications.
3.4 Integrating Sensors into Soft Designs: Best Practices
Integrating sensors into soft robotic devices is critical for enabling real-time feedback, precise control, and enhanced user interaction, especially in medical and wearable applications. The challenge lies in embedding sensing elements without compromising the softness, flexibility, and biocompatibility of the device.
Key Considerations for Sensor Integration
- Flexibility & Stretchability: Sensors must deform with the soft substrate without losing functionality.
- Biocompatibility: Materials should be safe for skin contact and long-term use.
- Signal Reliability: Minimize noise and signal drift caused by mechanical deformation.
- Miniaturization: Sensors should be small and lightweight to maintain comfort.
- Power Consumption: Efficient sensors extend wearable device battery life.
- Integration Method: Embedding, surface mounting, or printing sensors onto soft materials.
Mind Map: Sensor Integration Best Practices
Types of Sensors Commonly Used in Soft Robotics
- Resistive Sensors: Change resistance when stretched or compressed.
- Example: Stretchable strain gauges made from conductive elastomers.
- Capacitive Sensors: Detect changes in capacitance due to deformation.
- Example: Flexible capacitive pressure sensors embedded in soft insoles.
- Optical Sensors: Use light modulation to detect bending or pressure.
- Example: Fiber optic sensors integrated into soft surgical tools.
- Piezoelectric Sensors: Generate voltage under mechanical stress.
- Example: Piezoelectric films for detecting muscle activity in wearables.
- Magnetic Sensors: Detect changes in magnetic field caused by movement.
- Example: Embedded magnetic particles in soft actuators for position sensing.
Integration Techniques with Examples
| Technique | Description | Example Application |
|---|---|---|
| Embedding | Sensors are embedded within the soft matrix. | Soft robotic glove with embedded resistive strain sensors for finger motion tracking. |
| Surface Mounting | Sensors attached on the surface of soft parts. | Capacitive touch sensors laminated on soft exosuit sleeves for user input. |
| Printing | Sensors printed directly onto soft substrates. | Inkjet-printed flexible pressure sensors on wearable patches for pulse monitoring. |
| Lamination | Layered assembly combining sensors and soft layers. | Optical fiber sensors laminated inside soft surgical manipulators for force feedback. |
Example: Embedding Resistive Strain Sensors in a Soft Robotic Glove
- Objective: Track finger bending angles during rehabilitation exercises.
- Material: Conductive elastomer composite sensor embedded in silicone glove.
- Integration: Sensors molded directly into glove fingers during casting.
- Outcome: High sensitivity to bending with minimal impact on glove flexibility.
Mind Map: Signal Processing and Control
Best Practices Summary
- Start Early: Design sensor integration during the initial soft device design phase.
- Material Matching: Use sensors with mechanical properties compatible with the soft substrate.
- Robust Encapsulation: Protect sensors from moisture and mechanical wear without sacrificing flexibility.
- Iterative Testing: Validate sensor performance under expected deformation and loading conditions.
- User Comfort: Ensure sensors do not cause irritation or discomfort in wearable applications.
- Data Quality: Implement robust signal conditioning and calibration routines.
Additional Example: Flexible Capacitive Sensor Array for Wearable Physiological Monitoring
- Use Case: Monitoring respiration rate and chest expansion.
- Sensor Type: Flexible capacitive sensors printed on stretchable textile.
- Integration: Sewn into a soft chest band.
- Benefit: Non-invasive, continuous monitoring with high user comfort.
By following these best practices and leveraging appropriate sensor technologies, mechanical and biomedical engineers can develop soft robotic devices that provide accurate sensing capabilities while maintaining the essential softness and flexibility required for medical and wearable applications.
3.5 Example: Modeling a Soft Pneumatic Actuator for Wearable Use
Soft pneumatic actuators (SPAs) are fundamental components in wearable soft robotics, offering compliant motion and safe interaction with the human body. This section walks through the modeling process of a simple SPA designed for wearable applications such as assistive gloves or exosuits.
Understanding the SPA Structure and Function
A typical soft pneumatic actuator consists of an elastomeric chamber that inflates under pressure, causing bending or elongation. For wearable use, the actuator must be lightweight, flexible, and capable of producing sufficient force without compromising comfort.
Key parameters:
- Chamber geometry (length, width, wall thickness)
- Material properties (Young’s modulus, Poisson’s ratio)
- Inflation pressure
- Boundary conditions (fixed points, free ends)
Step 1: Define the Actuator Geometry and Material
- Choose a rectangular cross-section with internal chambers.
- Use silicone rubber (e.g., Ecoflex 00-30) with known hyperelastic properties.
Step 2: Material Modeling
Soft materials exhibit nonlinear elasticity. Use hyperelastic material models such as:
- Mooney-Rivlin model
- Ogden model
These models capture large deformations typical in SPAs.
Step 3: Finite Element Modeling (FEM)
- Create a 3D CAD model of the actuator.
- Mesh the geometry with fine elements in areas of high deformation.
- Apply boundary conditions: fix one end, allow the other to move freely.
- Apply internal pressure load to the chamber.
Step 4: Simulation and Analysis
- Run nonlinear static analysis to observe deformation.
- Extract output metrics: bending angle, tip displacement, generated force.
Mind Map: SPA Modeling Workflow
Step 5: Analytical Approximation (Simplified Model)
For quick estimation, model the SPA as a bending beam with pressure-induced moment:
\[ \theta = \frac{P \cdot A \cdot L}{E \cdot I} \]
Where:
- \(\theta\): bending angle
- \(P\): internal pressure
- \(A\): effective area
- \(L\): actuator length
- \(E\): Young’s modulus
- \(I\): moment of inertia
This helps in initial design before detailed FEM.
Example: Modeling a Soft Pneumatic Bending Actuator for a Wearable Glove
- Geometry: Length = 80 mm, Width = 20 mm, Wall thickness = 3 mm
- Material: Ecoflex 00-30, Ogden parameters from literature
- Pressure range: 0 to 40 kPa
Simulation results:
- At 30 kPa, bending angle ~ 60°
- Tip force ~ 1.5 N
Interpretation: Sufficient for finger flexion assistance.
Mind Map: Design Considerations for Wearable SPA
Step 6: Validation and Iteration
- Prototype actuator using molding.
- Measure bending angle and force under pressure.
- Compare with simulation data.
- Refine material parameters and geometry accordingly.
Summary
Modeling a soft pneumatic actuator for wearable use involves combining material science, geometry definition, and computational simulation. Using FEM with hyperelastic material models provides accurate predictions of actuator behavior, while simplified analytical models aid early-stage design. Iterative prototyping and validation ensure the actuator meets performance and comfort requirements essential for medical and wearable devices.
4. Actuation Methods in Soft Robotics
4.1 Pneumatic and Hydraulic Actuators: Design and Control
Soft robotics heavily relies on fluidic actuation methods, primarily pneumatic and hydraulic actuators, due to their inherent compliance, lightweight nature, and ability to produce smooth, biomimetic motion. This section delves into the design principles, control strategies, and practical examples of pneumatic and hydraulic actuators in medical and wearable soft robotic devices.
Overview of Pneumatic and Hydraulic Actuators
- Pneumatic Actuators: Use compressed air to inflate chambers or bladders, causing deformation and motion.
- Hydraulic Actuators: Use incompressible fluids (e.g., water, oil) to generate force and motion, often providing higher force density than pneumatics.
Both types enable soft, flexible movement ideal for interacting safely with human tissue.
Mind Map: Key Components of Pneumatic and Hydraulic Actuators
Design Considerations
- Material Compatibility: Elastomers must withstand repeated inflation without fatigue; hydraulic fluids must be biocompatible and non-toxic.
- Chamber Geometry: Shapes like bellows, pleated tubes, or fiber-reinforced chambers influence actuation direction and force.
- Pressure Range: Pneumatic systems typically operate at lower pressures (20-100 kPa), while hydraulics can handle higher pressures for stronger actuation.
- Response Time: Pneumatic systems may have slower response due to air compressibility; hydraulics offer faster, more precise control.
- Safety: Overpressure protection and fail-safe valves are critical, especially in medical applications.
Mind Map: Design Parameters Influencing Actuator Performance
Control Strategies
- Open-Loop Control: Simple on/off valve control; suitable for basic actuation but limited precision.
- Closed-Loop Control: Uses sensors (pressure, position) to provide feedback, enabling precise control of actuator position and force.
- PID Controllers: Common in regulating pressure and flow for smooth actuation.
- Model-Based Control: Incorporates actuator dynamics and material nonlinearities for advanced performance.
Mind Map: Control System Architecture
Practical Example 1: Pneumatic Soft Robotic Glove for Rehabilitation
- Design: Multiple air chambers along fingers made from silicone elastomer.
- Actuation: Controlled inflation bends fingers to assist grasping.
- Control: Closed-loop system with pressure sensors maintains desired finger position.
- Outcome: Enables stroke patients to regain hand mobility through assisted repetitive motion.
Practical Example 2: Hydraulic Soft Exosuit for Lower Limb Assistance
- Design: Soft actuators integrated into wearable fabric, hydraulic fluid used for smooth force transmission.
- Actuation: Fluid pressure controlled to assist knee extension during walking.
- Control: Model-based control adapts assistance based on gait phase detected by embedded sensors.
- Outcome: Reduces muscle fatigue and improves mobility in elderly or impaired users.
Summary
Pneumatic and hydraulic actuators are foundational to soft robotics in medical and wearable devices due to their adaptability and safe interaction with humans. Understanding their design parameters and control strategies is essential for developing effective, reliable soft robotic solutions.
For further reading and design tools, consider exploring:
- Soft Robotics Toolkit (softroboticstoolkit.com)
- Research papers on fluidic elastomer actuators
- Tutorials on closed-loop control of pneumatic systems
4.2 Shape Memory Alloys and Polymers in Soft Devices
Shape Memory Alloys (SMAs) and Shape Memory Polymers (SMPs) are pivotal smart materials in the design of soft robotics, especially for medical and wearable devices. Their unique ability to recover predefined shapes upon thermal, electrical, or mechanical stimuli allows engineers to create adaptive, lightweight, and compact actuators and structures.
What are Shape Memory Alloys (SMAs)?
SMAs are metal alloys, commonly nickel-titanium (NiTi), that can “remember” and return to a previously defined shape when heated above a certain temperature.
- Key Properties:
- Superelasticity
- Shape memory effect
- Biocompatibility (especially NiTi)
Example:
A soft robotic gripper using SMA wires contracts when heated by electrical current, enabling delicate grasping of tissues in minimally invasive surgery.
What are Shape Memory Polymers (SMPs)?
SMPs are polymers that can be deformed and fixed into a temporary shape and then recover their original shape upon exposure to stimuli such as heat, light, or pH changes.
- Key Properties:
- Lightweight and flexible
- Tunable activation temperatures
- Biodegradability (in some cases)
Example:
A wearable compression sleeve made from SMPs that tightens around a joint when warmed by body heat, providing dynamic support during movement.
Mind Map: SMA and SMP Characteristics and Applications
Best Practices for Using SMAs and SMPs in Soft Medical Devices
-
Material Selection Based on Application:
- Use NiTi SMAs for applications requiring high force and biocompatibility.
- Choose SMPs when lightweight, flexibility, and tunable activation are priorities.
-
Thermal Management:
- Design for efficient heat dissipation to avoid tissue damage.
- Use localized heating methods (e.g., resistive wires) for precise actuation.
-
Integration with Soft Structures:
- Embed SMA wires within silicone matrices for hybrid actuation.
- Layer SMP films with flexible substrates to create shape-changing surfaces.
-
Control Strategies:
- Implement feedback loops using temperature and strain sensors to regulate actuation.
- Use pulse-width modulation (PWM) for fine control of SMA heating.
-
Durability and Fatigue Testing:
- Conduct cyclic testing to ensure long-term reliability.
- Account for potential degradation in polymer-based SMPs under physiological conditions.
Mind Map: Best Practices for SMA and SMP Integration
Example 1: SMA-Driven Soft Robotic Finger for Rehabilitation
- Design: SMA wires embedded along the length of a silicone finger structure.
- Function: Electrical current heats SMA wires causing contraction, bending the finger to assist patients with limited mobility.
- Best Practice Applied: Thermal management via insulated wiring and PWM control to prevent overheating.
- Outcome: Lightweight, silent, and effective assistive device enabling repetitive therapeutic exercises.
Example 2: SMP-Based Self-Adjusting Orthotic Brace
- Design: SMP panels integrated into a flexible brace that can be deformed flat for easy donning.
- Function: Upon exposure to body heat, SMPs return to a pre-programmed curved shape, providing customized joint support.
- Best Practice Applied: Material selection for activation temperature close to skin temperature and biocompatibility.
- Outcome: Improved patient comfort and compliance due to adaptive fit and ease of use.
Summary
Shape Memory Alloys and Polymers offer transformative capabilities for soft robotics in medical and wearable devices. By understanding their properties, integrating them thoughtfully, and applying best practices in design and control, engineers can develop innovative, patient-friendly solutions that enhance functionality and comfort.
4.3 Electroactive Polymers and Their Medical Applications
Electroactive Polymers (EAPs) are a class of smart materials that exhibit a change in size or shape when stimulated by an electric field. Their unique properties make them highly attractive for soft robotics, especially in medical and wearable devices where flexibility, biocompatibility, and low weight are critical.
What are Electroactive Polymers?
- Definition: Polymers that respond to electrical stimulation by changing shape or mechanical properties.
- Types:
- Ionic EAPs (e.g., Ionic Polymer-Metal Composites - IPMCs)
- Electronic EAPs (e.g., Dielectric Elastomers)
Key Properties of EAPs Relevant to Medical Devices
- High flexibility and stretchability
- Low density and lightweight
- Large strain response (up to several hundred percent)
- Low driving voltage for ionic types
- Biocompatibility potential with proper material selection
Mind Map: Electroactive Polymers Overview
Medical Applications of Electroactive Polymers
-
Soft Actuators for Assistive Devices
- Example: Soft robotic gloves using IPMCs to assist finger movement in stroke rehabilitation.
- Benefit: Lightweight, silent operation, and compliant with human tissue.
-
Implantable Devices
- Example: Dielectric elastomer actuators used in artificial muscles for cardiac assist devices.
- Benefit: Mimics natural muscle movement with minimal mechanical complexity.
-
Wearable Sensors and Haptic Feedback
- Example: Conductive polymer-based sensors integrated into wearable patches for real-time physiological monitoring.
- Benefit: Conformable to skin, providing accurate and continuous data.
-
Minimally Invasive Surgical Tools
- Example: Soft grippers made from dielectric elastomers that can gently manipulate delicate tissues.
- Benefit: Reduced trauma and enhanced dexterity.
Mind Map: Medical Applications of EAPs
Best Practices for Using EAPs in Medical Soft Robotics
- Material Selection: Choose biocompatible and durable polymers; consider ionic vs electronic types based on application voltage and strain requirements.
- Encapsulation: Protect EAPs from body fluids and mechanical wear without compromising flexibility.
- Power Supply: Design low-voltage, portable power sources for wearable and implantable devices.
- Integration: Seamlessly combine EAPs with sensors and control electronics for responsive actuation.
Example: Soft Robotic Glove Using IPMC Actuators
- Design: Thin IPMC strips embedded along finger joints.
- Function: When voltage is applied, IPMC bends to assist finger flexion and extension.
- Outcome: Enables stroke patients to regain hand mobility with lightweight, quiet assistance.
- Best Practice Highlight: Iterative testing ensured actuator strain matched natural finger movement range.
Summary
Electroactive Polymers offer a versatile and promising avenue for developing soft, compliant, and efficient actuators and sensors in medical and wearable robotics. Their integration enables devices that are more comfortable, adaptive, and effective in assisting or monitoring patients, pushing the boundaries of personalized healthcare.
4.4 Hybrid Actuation Systems: Combining Soft and Rigid Elements
Hybrid actuation systems leverage the complementary strengths of both soft and rigid components to create medical and wearable devices that are adaptable, durable, and highly functional. By integrating soft actuators with rigid structures, designers can achieve precise control, enhanced force output, and improved user comfort, which are critical in medical robotics.
Why Hybrid Actuation?
- Soft components provide compliance, flexibility, and safe interaction with human tissue.
- Rigid components offer structural support, precise motion control, and durability.
- Combining both allows for devices that can adapt to complex anatomical shapes while maintaining necessary mechanical strength.
Key Design Considerations
- Interface design between soft and rigid parts to ensure seamless force transmission and durability.
- Material compatibility to prevent wear or delamination.
- Control strategies that accommodate the differing mechanical behaviors.
Mind Map: Hybrid Actuation System Components
Example 1: Soft Robotic Exosuit with Rigid Frame Support
Description: A soft robotic exosuit designed to assist gait rehabilitation integrates soft pneumatic actuators that provide muscle-like contraction with a lightweight rigid frame that anchors the actuators and aligns the device with the user’s limbs.
Best Practices Demonstrated:
- Rigid frame ensures consistent actuator placement and force direction.
- Soft actuators conform to the user’s body, reducing discomfort.
- Flexible joints between rigid segments allow natural limb movement.
Outcome: Improved patient comfort and effective assistance during walking therapy.
Example 2: Hybrid Soft-Rigid Surgical Gripper
Description: A surgical gripper uses rigid fingers for precise positioning combined with soft, inflatable pads at the fingertips to gently grasp delicate tissues.
Best Practices Demonstrated:
- Rigid fingers provide accurate control and force application.
- Soft pads reduce risk of tissue damage.
- Integration of pressure sensors in rigid segments enables feedback control.
Outcome: Enhanced safety and dexterity in minimally invasive procedures.
Mind Map: Design Workflow for Hybrid Actuation Systems
Practical Tips for Developers
- Use compliant adhesives or mechanical interlocks to join soft and rigid parts reliably.
- Design rigid components with ergonomic considerations to complement the soft elements.
- Incorporate modularity to allow easy replacement or adjustment of soft actuators.
- Employ multi-material 3D printing when possible to fabricate integrated hybrid parts.
Summary
Hybrid actuation systems represent a powerful approach in soft robotics for medical and wearable devices, balancing flexibility with precision. By thoughtfully combining soft actuators with rigid structures, engineers can create devices that are both effective and comfortable, meeting the demanding requirements of medical applications.
4.5 Case Study: Pneumatic Soft Robot for Assisted Mobility
Introduction
Pneumatic soft robots have emerged as a promising solution for assisted mobility, offering lightweight, compliant, and adaptable support for users with mobility impairments. This case study explores the design, fabrication, and application of a pneumatic soft robotic device aimed at enhancing assisted mobility, such as a soft exosuit for lower limb support.
Design Objectives
- Provide assistive force to enhance walking and standing
- Ensure user comfort through soft, flexible materials
- Enable intuitive control and adaptability to user movement
- Maintain safety and reliability during use
System Overview
The pneumatic soft robot consists of:
- Soft pneumatic actuators (SPAs) that contract or expand to assist joint movement
- Air supply and control system (compressor, valves, microcontroller)
- Sensors for feedback (pressure sensors, inertial measurement units)
- Soft wearable structure to anchor actuators comfortably on the body
Mind Map: Key Components of Pneumatic Soft Robot for Assisted Mobility
Design and Fabrication Example
Actuator Design: Fiber-reinforced pneumatic artificial muscles (PAMs) were selected due to their high force-to-weight ratio and compliance. The PAMs contract upon inflation, mimicking natural muscle behavior.
Material Selection: Silicone elastomer (Ecoflex 00-30) was used for the actuator body, providing flexibility and durability. Kevlar fibers were wrapped helically to constrain radial expansion and direct axial contraction.
Fabrication Process:
- Mold silicone into tubular shapes.
- Wrap Kevlar fibers at a precise angle around the tube.
- Seal ends with rigid connectors for air inlet/outlet.
Wearable Integration: The actuators were mounted on a soft textile harness aligned with the user’s calf muscles. Adjustable straps ensured proper fit and comfort.
Control Strategy Example
A closed-loop control system was implemented using pressure sensors embedded in the actuators and inertial measurement units (IMUs) on the limbs. The microcontroller modulated the valve opening to adjust actuator pressure based on real-time gait phase detection.
Example: During the stance phase, the actuator inflates to provide support; during the swing phase, it deflates to allow free movement.
Performance Evaluation
- Assisted Walking Test: Users demonstrated increased walking endurance and reduced muscle fatigue.
- Comfort Assessment: Soft materials and ergonomic design minimized pressure points and discomfort.
- Reliability: The pneumatic system maintained consistent actuation over multiple cycles without leakage.
Mind Map: Best Practices Illustrated in This Case Study
Additional Examples of Pneumatic Soft Robots for Assisted Mobility
-
Soft Exosuit by Harvard Biodesign Lab: Uses cable-driven actuation combined with soft textiles to assist hip and ankle movement.
-
Pneumatic Glove for Hand Rehabilitation: Employs soft pneumatic actuators to assist finger flexion and extension.
-
Lower Limb Soft Exoskeleton: Integrates multiple pneumatic actuators to support knee extension during walking.
Summary
This case study demonstrates how pneumatic soft robots can be effectively designed and integrated into wearable devices for assisted mobility. By carefully selecting materials, designing actuators that mimic natural muscle function, and implementing closed-loop control strategies, developers can create comfortable, effective, and reliable soft robotic systems that enhance user mobility and quality of life.
5. Sensor Integration and Feedback Systems
5.1 Types of Sensors Suitable for Soft Robotics
Soft robotics relies heavily on sensors that can conform, stretch, and flex along with the soft materials to provide accurate and reliable feedback. Selecting the right sensor type is crucial for ensuring effective interaction with the environment and the user, especially in medical and wearable devices where comfort and safety are paramount.
Overview of Sensor Categories for Soft Robotics
Mechanical Sensors
Strain Sensors
- Measure deformation or elongation of soft materials.
- Commonly made using conductive elastomers, liquid metals, or nanomaterial composites.
- Example: A soft robotic glove uses stretchable strain sensors embedded along finger joints to monitor finger bending during rehabilitation exercises.
Pressure Sensors
- Detect applied force or pressure on soft surfaces.
- Often implemented using piezoresistive or capacitive materials.
- Example: A soft wearable sleeve integrates pressure sensors to monitor muscle contractions and provide biofeedback.
Tactile Sensors
- Provide spatially resolved touch information.
- Can be arrays of micro-pressure sensors or capacitive touch sensors.
- Example: A soft robotic hand uses tactile sensors on fingertips to detect object texture and grip force.
Chemical Sensors
pH Sensors
- Monitor acidity or alkalinity, useful in wound monitoring or sweat analysis.
- Flexible pH-sensitive hydrogels or conductive polymers can be integrated.
- Example: A soft wearable patch that monitors skin pH to detect infection risks.
Biosensors
- Detect specific biomolecules such as glucose, lactate, or electrolytes.
- Often use enzymatic reactions coupled with flexible electrodes.
- Example: A soft patch for continuous glucose monitoring in diabetic patients.
Optical Sensors
Fiber Optic Sensors
- Use light transmission changes to detect strain or pressure.
- Highly flexible and immune to electromagnetic interference.
- Example: A soft robotic catheter embedded with fiber optic sensors to monitor bending inside blood vessels.
Photodetectors
- Detect light intensity changes, useful in pulse oximetry or skin reflectance.
- Flexible photodiodes can be integrated into soft wearables.
- Example: A soft wristband with photodetectors for continuous heart rate monitoring.
Electrical Sensors
Capacitive Sensors
- Measure changes in capacitance caused by deformation or proximity.
- Flexible capacitive sensors can detect touch, pressure, or stretch.
- Example: A soft robotic exosuit uses capacitive sensors to detect joint angles.
Resistive Sensors
- Detect resistance changes due to strain or pressure.
- Made from conductive elastomers or nanocomposites.
- Example: A soft wearable band uses resistive sensors to monitor breathing patterns.
Piezoelectric Sensors
- Generate voltage in response to mechanical stress.
- Useful for dynamic pressure or vibration sensing.
- Example: A soft robotic footpad uses piezoelectric sensors to detect gait dynamics.
Magnetic Sensors
Hall Effect Sensors
- Detect magnetic field changes caused by movement or position.
- Can be embedded with small magnets in soft structures.
- Example: A soft robotic finger with embedded magnets and Hall sensors to track finger joint angles.
Magnetoresistive Sensors
- Measure changes in electrical resistance due to magnetic fields.
- Flexible versions are emerging for soft robotics applications.
Summary Table of Sensor Types with Examples
| Sensor Type | Principle | Typical Materials/Techniques | Example Application |
|---|---|---|---|
| Strain Sensor | Resistance change | Conductive elastomers, liquid metal | Soft glove monitoring finger movement |
| Pressure Sensor | Capacitance/piezo | Piezoresistive films, capacitive pads | Wearable sleeve for muscle contraction |
| Tactile Sensor | Pressure mapping | Micropressure arrays, capacitive | Robotic hand fingertip texture detection |
| pH Sensor | Chemical reaction | pH-sensitive hydrogels | Wound monitoring patch |
| Biosensor | Enzymatic reaction | Flexible electrodes, polymers | Glucose monitoring patch |
| Fiber Optic Sensor | Light modulation | Optical fibers | Catheter bending monitoring |
| Photodetector | Light detection | Flexible photodiodes | Heart rate wristband |
| Capacitive Sensor | Capacitance change | Flexible electrodes | Exosuit joint angle detection |
| Resistive Sensor | Resistance change | Conductive composites | Breathing pattern monitor |
| Piezoelectric Sensor | Voltage generation | Piezoelectric polymers | Gait dynamics footpad |
| Hall Effect Sensor | Magnetic field | Embedded magnets + Hall sensors | Finger joint angle tracking |
Practical Example: Selecting Sensors for a Soft Wearable Rehabilitation Glove
- Goal: Monitor finger flexion, applied grip force, and tactile feedback.
- Sensors chosen:
- Stretchable strain sensors along finger joints for bending measurement.
- Capacitive pressure sensors on fingertips to detect grip force.
- Tactile sensor arrays for texture and slip detection.
This combination ensures comprehensive monitoring of hand movement and interaction with objects, enabling precise rehabilitation feedback.
By understanding the types of sensors and their integration methods, mechanical and biomedical engineers can design soft robotic devices that are both functional and comfortable for medical and wearable applications.
5.2 Embedding Flexible Sensors for Real-Time Monitoring
Embedding flexible sensors into soft robotic systems is a critical step toward achieving real-time monitoring capabilities essential for medical and wearable devices. These sensors must conform to soft, deformable surfaces without compromising the device’s flexibility, comfort, or functionality.
Why Embed Flexible Sensors?
- Real-time feedback: Enables immediate response and adaptation to user movements or physiological changes.
- Enhanced control: Improves precision in actuation and interaction with biological tissues.
- Safety monitoring: Detects abnormal conditions such as excessive strain or temperature.
- Data collection: Facilitates continuous health monitoring for diagnostics and therapy.
Types of Flexible Sensors Commonly Embedded
- Strain Sensors: Measure deformation or stretch.
- Pressure Sensors: Detect contact forces or pressure changes.
- Temperature Sensors: Monitor heat variations, critical for patient safety.
- Electrophysiological Sensors: Capture bio-signals like EMG or ECG.
- Chemical Sensors: Detect biomarkers in sweat or interstitial fluids.
Mind Map: Key Considerations for Embedding Flexible Sensors
Integration Techniques
-
Direct Printing: Using inkjet or screen printing to deposit conductive inks or sensor materials directly onto soft substrates.
- Example: Printing piezoresistive strain sensors on silicone gloves for finger movement tracking.
-
Lamination: Attaching pre-fabricated thin-film sensors onto soft robotic surfaces using adhesive layers.
- Example: Laminated flexible pressure sensors on a soft exosuit sleeve to monitor muscle contractions.
-
Encapsulation: Embedding sensors within soft elastomer layers to protect them from mechanical damage and moisture.
- Example: Encapsulated temperature sensors inside a soft robotic sleeve to ensure durability during wear.
-
Stretchable Interconnects: Using serpentine or fractal conductive traces that maintain electrical connectivity under deformation.
- Example: Stretchable copper traces connecting multiple strain sensors on a soft robotic hand.
Example: Soft Robotic Glove with Embedded Strain and Pressure Sensors
- Objective: Monitor finger flexion and grip force in real-time for rehabilitation.
- Sensors Used: Piezoresistive strain sensors printed on finger joints and capacitive pressure sensors on fingertips.
- Integration: Sensors printed directly on silicone substrate, encapsulated with a thin silicone layer for protection.
- Outcome: Accurate mapping of finger movement and grip strength, enabling adaptive assistance.
Mind Map: Workflow for Embedding Flexible Sensors
Best Practices
- Mechanical Matching: Choose sensor materials and designs that match the mechanical properties of the soft robotic substrate to avoid delamination or signal loss.
- Minimize Sensor Footprint: Use ultra-thin and lightweight sensors to maintain wearer comfort and device flexibility.
- Robust Encapsulation: Protect sensors from sweat, moisture, and mechanical wear without compromising sensitivity.
- Signal Conditioning: Incorporate filtering and amplification close to the sensor to reduce noise.
- Power Efficiency: Design low-power sensor circuits for wearable applications to extend battery life.
Additional Example: Wearable Soft Sensor Array for Physiological Monitoring
- Application: Continuous monitoring of respiration and heart rate in a soft chest band.
- Sensors: Flexible piezoelectric sensors for respiration, flexible ECG electrodes for heart rate.
- Integration: Sensors laminated onto a soft elastomeric band with stretchable wiring.
- Benefit: Comfortable, unobtrusive monitoring enabling long-term health tracking.
Embedding flexible sensors effectively is fundamental to unlocking the full potential of soft robotics in medical and wearable devices. By carefully selecting sensor types, integration methods, and following best practices, developers can create responsive, reliable, and user-friendly systems that significantly enhance patient care and user experience.
5.3 Signal Processing and Data Interpretation in Soft Devices
Soft robotics devices, especially in medical and wearable applications, rely heavily on sensor data to provide real-time feedback and enable adaptive control. Effective signal processing and data interpretation are critical to transform raw sensor outputs into meaningful information that can guide device behavior or inform clinicians.
Key Steps in Signal Processing for Soft Robotics Sensors
- Signal Acquisition: Capturing raw data from embedded sensors such as strain gauges, capacitive sensors, or flexible pressure sensors.
- Preprocessing: Filtering noise, normalizing signals, and compensating for sensor drift or environmental factors.
- Feature Extraction: Identifying relevant characteristics from the processed signals, e.g., peak values, frequency components, or temporal patterns.
- Data Fusion: Combining data from multiple sensors to improve accuracy and robustness.
- Interpretation & Decision Making: Mapping processed data to actionable insights or control commands.
Mind Map: Signal Processing Workflow in Soft Robotics
Example: Processing Data from a Soft Wearable Pressure Sensor Array
Consider a soft wearable device embedded with a matrix of flexible pressure sensors designed to monitor foot pressure distribution for gait analysis.
- Signal Acquisition: Each sensor outputs an analog voltage proportional to applied pressure.
- Preprocessing: Signals are passed through a low-pass filter to remove high-frequency noise caused by movement artifacts.
- Feature Extraction: Peak pressures and pressure distribution patterns are extracted.
- Data Fusion: Combining data from all sensors to create a pressure heatmap.
- Interpretation: Identifying abnormal pressure points indicating potential foot ulcers or gait abnormalities.
This processed data can be visualized in real-time on a connected device, enabling clinicians to monitor patient progress or adjust therapy.
Mind Map: Example - Pressure Sensor Data Processing
Advanced Techniques: Machine Learning for Data Interpretation
In complex soft robotic systems, traditional threshold-based methods may be insufficient. Machine learning models can learn from sensor data patterns to classify movements, detect anomalies, or predict user intent.
Example: A soft robotic glove uses embedded flex sensors to detect finger bending. A supervised learning algorithm (e.g., Support Vector Machine) is trained on sensor data to classify hand gestures for controlling a prosthetic device.
Steps:
- Collect labeled sensor data for different gestures.
- Extract features such as bending angles and temporal patterns.
- Train the classifier.
- Deploy the model for real-time gesture recognition.
This approach improves accuracy and adaptability over manual thresholding.
Mind Map: Machine Learning Pipeline for Soft Robotics Data
Best Practices
- Sensor Calibration: Regularly calibrate sensors to maintain data accuracy.
- Noise Management: Use appropriate filters and shielding to minimize interference.
- Data Synchronization: Ensure time alignment when fusing multiple sensor streams.
- Adaptive Algorithms: Implement algorithms that can adjust to sensor drift or changing conditions.
- User-Centered Interpretation: Tailor data interpretation to specific medical or wearable use cases for meaningful insights.
By integrating robust signal processing and intelligent data interpretation, soft robotics devices can achieve higher reliability, responsiveness, and clinical relevance, ultimately enhancing patient outcomes and user experience.
5.4 Closed-Loop Control Systems for Medical Soft Robots
Closed-loop control systems are essential in medical soft robotics to ensure precise, adaptive, and safe operation. Unlike open-loop systems, closed-loop systems use real-time feedback from sensors to dynamically adjust actuator behavior, improving performance and patient outcomes.
What is a Closed-Loop Control System?
A closed-loop control system continuously monitors the output of a system and compares it to the desired setpoint. Based on the difference (error), the controller adjusts inputs to minimize this error.
Key Components:
- Sensor: Measures system output (e.g., position, force, pressure).
- Controller: Processes sensor data and computes corrective actions.
- Actuator: Executes commands to adjust the system.
- Plant: The soft robotic device being controlled.
Importance in Medical Soft Robotics
- Precision: Ensures accurate movement or force application critical for therapy or assistance.
- Adaptability: Adjusts to patient variability and changing conditions.
- Safety: Detects and corrects unexpected behaviors to prevent injury.
Mind Map: Closed-Loop Control System Components
Control Strategies Commonly Used
- PID Control: Simple and effective for many soft robotic applications. Adjusts actuator input based on proportional, integral, and derivative terms of the error.
- Model Predictive Control (MPC): Uses a model of the system to predict future states and optimize control inputs.
- Adaptive Control: Modifies control parameters in real-time to handle system nonlinearities and uncertainties.
- Machine Learning Approaches: Neural networks or reinforcement learning to handle complex dynamics and improve control over time.
Example 1: Closed-Loop Control of a Soft Robotic Glove for Hand Rehabilitation
- Objective: Assist finger flexion and extension with precise force and position control.
- Sensors: Flexible bend sensors on each finger to measure joint angles.
- Controller: PID controller adjusts pneumatic pressure to actuators based on sensor feedback.
- Outcome: The glove adapts to patient hand size and movement speed, providing smooth and safe assistance.
Mind Map: Closed-Loop Control in Soft Robotic Glove
Example 2: Closed-Loop Control in a Soft Exosuit for Gait Assistance
- Objective: Provide assistive torque to hip and knee joints during walking.
- Sensors: IMUs and force sensors to detect gait phase and user intent.
- Controller: Model Predictive Control to optimize actuator timing and force.
- Outcome: The exosuit synchronizes assistance with the user’s natural gait, improving mobility and reducing fatigue.
Mind Map: Closed-Loop Control in Soft Exosuit
Best Practices for Implementing Closed-Loop Control in Medical Soft Robots
- Select Appropriate Sensors: Use flexible, biocompatible sensors that do not interfere with patient comfort.
- Robust Signal Processing: Employ filtering techniques (e.g., Kalman filters) to reduce noise and improve sensor reliability.
- Model System Dynamics: Develop accurate models of soft actuators and tissues to improve controller performance.
- Safety Mechanisms: Integrate fail-safes and limits to prevent excessive force or unintended movements.
- User-Centered Tuning: Customize control parameters based on individual patient needs and feedback.
Summary
Closed-loop control systems are fundamental to the success of medical soft robotics, enabling devices to respond intelligently and safely to complex biological environments. By combining advanced sensors, tailored control algorithms, and adaptive actuators, these systems enhance therapeutic outcomes and patient quality of life.
5.5 Example: Wearable Soft Sensor Array for Physiological Monitoring
Wearable soft sensor arrays are revolutionizing physiological monitoring by providing comfortable, conformable, and highly sensitive platforms that can continuously track vital signs and biomechanical signals. This section explores the design, integration, and application of a wearable soft sensor array, highlighting best practices and practical examples.
Overview of Wearable Soft Sensor Arrays
Wearable soft sensor arrays consist of multiple flexible sensors embedded in a soft substrate that can conform to the skin or body parts. These arrays enable multi-point sensing, improving spatial resolution and data richness for physiological monitoring.
Key physiological parameters monitored:
- Heart rate and pulse
- Respiration rate
- Muscle activity (EMG)
- Skin temperature
- Blood oxygen saturation (SpO2)
Design Considerations
- Material Selection: Soft, biocompatible elastomers like silicone (e.g., Ecoflex, Dragon Skin) provide flexibility and skin comfort.
- Sensor Types: Capacitive, resistive, piezoresistive, and optical sensors are commonly used.
- Sensor Placement: Strategic positioning over anatomical landmarks ensures accurate signal capture.
- Interconnects: Stretchable conductive traces or liquid metal channels maintain electrical connectivity during deformation.
Mind Map: Design Components of a Wearable Soft Sensor Array
Example: Soft Capacitive Sensor Array for Pulse Monitoring
A practical example is a soft capacitive sensor array designed to monitor pulse waveforms on the wrist.
- Construction:
- Two layers of stretchable silicone with embedded conductive electrodes forming capacitors.
- Array layout covers the radial artery region.
- Working Principle:
- Pulse-induced skin deformation changes capacitance.
- Multipoint sensing improves signal reliability.
- Data Processing:
- Signals are filtered and processed to extract heart rate variability.
Best Practice: Use multilayer encapsulation to protect sensors from sweat and mechanical damage without compromising flexibility.
Mind Map: Signal Processing Workflow
Integration with Wearable Systems
- Flexible Electronics: Incorporate stretchable PCBs and microcontrollers.
- Wireless Communication: BLE modules enable real-time data transmission to smartphones.
- Power Management: Flexible batteries or energy harvesting modules ensure long-term operation.
Case Study: Soft Sensor Array for Respiratory Monitoring
A research group developed a soft sensor array embedded in a chest band to monitor respiratory rate and pattern.
- Sensors: Piezoresistive sensors arranged circumferentially.
- Function: Detect chest expansion and contraction.
- Outcome: High correlation with clinical respiratory measurements.
Lesson Learned: Calibration for individual users improves accuracy due to anatomical variability.
Summary of Best Practices
- Prioritize skin comfort and biocompatibility in material choice.
- Use multipoint sensor arrays to enhance data fidelity.
- Protect sensors with appropriate encapsulation.
- Employ robust signal processing algorithms to handle noise.
- Design for wireless, low-power operation.
- Validate with real-world testing and user feedback.
By following these guidelines and leveraging the example designs, mechanical and biomedical engineers can develop effective wearable soft sensor arrays that advance physiological monitoring capabilities in medical and consumer health applications.
6. Fabrication Techniques and Prototyping
6.1 Molding and Casting Methods for Soft Components
Molding and casting are foundational fabrication techniques in soft robotics, especially for medical and wearable devices where flexibility, biocompatibility, and precision are critical. These methods allow engineers to create complex, soft geometries with repeatability and scalability.
Overview of Molding and Casting
Molding involves creating a negative cavity (mold) into which a liquid or semi-liquid material is poured or injected. Once the material cures or solidifies, it takes the shape of the mold.
Casting is the process of pouring the soft material into the mold and allowing it to set, producing the final soft component.
Key Advantages
- High precision and repeatability
- Ability to produce complex geometries
- Compatibility with a wide range of soft materials (silicones, elastomers, hydrogels)
- Cost-effective for prototyping and small batch production
Common Molding Techniques
- Compression Molding: Material is placed in a heated mold cavity and compressed to fill the mold.
- Injection Molding: Material is injected under pressure into the mold.
- Dip Molding: Substrate is dipped into liquid material to form thin layers.
- Spin Casting: Material is poured into a spinning mold to distribute evenly.
Step-by-Step Process Example: Fabricating a Soft Robotic Finger
- Design the Mold: Use CAD software to design the finger mold with internal channels for pneumatic actuation.
- Create the Mold: 3D print the mold using rigid resin or machine from aluminum.
- Prepare the Material: Mix silicone elastomer with curing agent.
- Pour/Cast: Pour the silicone into the mold carefully to avoid bubbles.
- Curing: Allow the silicone to cure at room temperature or in an oven.
- Demolding: Remove the cured soft finger from the mold.
- Post-Processing: Trim excess material and assemble with tubing.
Mind Map: Molding and Casting Workflow
Best Practices
- Use Mold Release Agents: To prevent sticking and damage to delicate soft parts.
- Degas Materials: Use vacuum chambers to remove air bubbles that can weaken the structure.
- Control Curing Conditions: Temperature and time affect mechanical properties.
- Design for Demolding: Include draft angles and flexible mold parts to ease removal.
Example: Soft Robotic Glove Fabrication
A research team designed a soft robotic glove for hand rehabilitation. They used:
- Mold Design: Multi-part molds created via 3D printing to form finger actuators with embedded air channels.
- Material: Platinum-cured silicone for biocompatibility.
- Casting: Silicone was degassed and poured into molds, cured at 60°C for 4 hours.
- Assembly: After demolding, actuators were connected to pneumatic tubing and integrated into a fabric glove.
The glove demonstrated excellent flexibility and durability, enabling controlled finger movements.
Troubleshooting Common Issues
| Issue | Cause | Solution |
|---|---|---|
| Air bubbles in cast | Improper degassing or pouring speed | Use vacuum degassing; pour slowly and steadily |
| Mold sticking | No mold release agent or rough mold | Apply mold release; polish mold surfaces |
| Incomplete filling | Mold design flaws or material viscosity | Redesign mold with proper vents; adjust material viscosity |
| Warping or shrinkage | Incorrect curing temperature/time | Follow recommended curing protocols |
Mind Map: Troubleshooting and Quality Control
Summary
Molding and casting remain essential techniques for fabricating soft robotic components in medical and wearable devices. By carefully selecting materials, designing molds thoughtfully, and following best practices such as degassing and controlled curing, developers can produce reliable, high-performance soft parts tailored for sensitive applications like rehabilitation gloves, exosuits, and wearable sensors.
6.2 3D Printing and Additive Manufacturing of Soft Materials
Additive manufacturing (AM), commonly known as 3D printing, has revolutionized the fabrication of complex geometries and customized components in soft robotics, especially for medical and wearable devices. This section explores the state-of-the-art 3D printing techniques tailored for soft materials, their advantages, challenges, and practical examples to guide mechanical and biomedical engineers in device development.
Overview of 3D Printing Soft Materials
Soft robotics demands materials with flexibility, stretchability, and biocompatibility. Traditional manufacturing methods often struggle to produce intricate soft structures with embedded functionalities. 3D printing enables layer-by-layer fabrication, allowing precise control over geometry and material placement.
Commonly used soft materials in 3D printing:
- Silicone-based elastomers
- Thermoplastic polyurethanes (TPU)
- Hydrogels
- Shape memory polymers
Popular 3D printing techniques for soft materials:
- Fused Deposition Modeling (FDM) with flexible filaments
- Direct Ink Writing (DIW)
- Stereolithography (SLA) with soft resins
- PolyJet printing
Mind Map: 3D Printing Techniques for Soft Robotics
Best Practices in 3D Printing Soft Materials
-
Material Preparation:
- Ensure proper viscosity and curing properties for inks or resins.
- Use additives or plasticizers to tune flexibility.
-
Printer Calibration:
- Optimize nozzle temperature and speed for flexible filaments.
- Adjust layer height and infill patterns to balance flexibility and strength.
-
Design Considerations:
- Incorporate compliant structures like lattices or auxetic patterns.
- Design for minimal support structures to avoid damaging soft parts.
-
Post-Processing:
- UV curing for photopolymers.
- Cleaning and removal of support materials carefully to preserve softness.
Example 1: Fabricating a Soft Robotic Finger Using FDM with TPU
- Objective: Create a wearable soft robotic finger for hand rehabilitation.
- Material: TPU filament (shore hardness ~85A).
- Process:
- Design finger segments with flexible joints.
- Print using FDM with optimized nozzle temperature (220°C) and slow print speed (20 mm/s) for better layer adhesion.
- Use flexible infill patterns (e.g., honeycomb) to mimic tendon-like behavior.
- Outcome: Durable, flexible finger capable of bending with pneumatic actuation.
Mind Map: Design to Printing Workflow for Soft Robotic Components
Example 2: Direct Ink Writing of a Soft Wearable Sensor Patch
- Objective: Produce a flexible sensor patch that conforms to skin for physiological monitoring.
- Material: Silicone-based ink loaded with conductive particles.
- Process:
- Prepare ink with rheological properties suitable for extrusion.
- Use DIW printer with fine nozzle (200 microns) to print sensor patterns.
- Print multi-layer structures embedding conductive traces and insulating layers.
- Cure at room temperature to maintain softness.
- Outcome: Soft, stretchable sensor patch with reliable electrical performance.
Challenges and Solutions
| Challenge | Solution/Best Practice |
|---|---|
| Material compatibility with printer | Select printers supporting flexible materials or customize inks |
| Layer adhesion and delamination | Optimize printing temperature and speed, use adhesion promoters |
| Maintaining softness post-print | Use low-temperature curing and avoid harsh post-processing |
| Complex multi-material printing | Employ printers capable of multi-nozzle extrusion or PolyJet |
Summary
3D printing and additive manufacturing of soft materials empower engineers to rapidly prototype and produce customized medical and wearable soft robotic devices. By understanding material properties, printing techniques, and design constraints, developers can create innovative solutions that meet the flexibility, comfort, and functionality demands of medical applications.
For further reading and tutorials, consider exploring open-source projects and manufacturer guidelines on flexible filament printing and DIW setups tailored for biomedical soft robotics.
6.3 Multi-Material Fabrication for Complex Soft Structures
Multi-material fabrication is a pivotal technique in soft robotics, enabling the creation of devices that combine diverse mechanical properties, functionalities, and biological compatibilities within a single integrated structure. This approach is especially critical for medical and wearable devices, where flexibility, durability, and responsiveness must be finely balanced.
Why Multi-Material Fabrication?
- Tailored Mechanical Properties: Different materials can provide varying stiffness, elasticity, or toughness, allowing designers to localize flexibility or rigidity where needed.
- Functional Integration: Combining conductive, sensing, or actuation materials with structural elastomers enables multifunctional devices.
- Enhanced Biocompatibility: Using biocompatible materials in contact areas while employing more robust materials elsewhere.
Common Multi-Material Fabrication Techniques
- Multi-Material 3D Printing: Enables precise deposition of different materials layer-by-layer or side-by-side.
- Layer-by-Layer Casting and Molding: Sequential casting of materials with different properties.
- Overmolding: Molding a second material over a pre-formed part.
- Embedded Component Fabrication: Integrating sensors or actuators during fabrication.
Mind Map: Multi-Material Fabrication Overview
Example 1: Multi-Material 3D Printed Soft Robotic Finger
A soft robotic finger designed for rehabilitation was fabricated using a multi-material PolyJet 3D printer. The design combined a flexible elastomeric material for the finger’s body with a stiffer photopolymer for joint reinforcement.
-
Materials Used:
- TangoPlus (flexible elastomer)
- VeroWhite (rigid photopolymer)
-
Benefits:
- Enhanced joint durability without sacrificing overall flexibility.
- Integrated channels for pneumatic actuation printed within the structure.
-
Outcome: The finger demonstrated realistic bending motions and durability suitable for repetitive rehabilitation exercises.
Mind Map: Case Study - Soft Robotic Finger Fabrication
Example 2: Layered Casting for a Soft Robotic Sleeve
A wearable soft robotic sleeve designed to assist arm movement was fabricated using a layered casting approach. The inner layer was a soft silicone for skin comfort, while the outer layer was a tougher silicone embedded with fiber reinforcements for structural support.
-
Materials:
- Ecoflex 00-30 (soft silicone)
- Dragon Skin 10 (tough silicone)
- Kevlar fibers for reinforcement
-
Fabrication Steps:
- Cast the inner soft silicone layer and partially cure.
- Lay Kevlar fibers on the inner layer.
- Cast the tougher outer silicone layer over the fibers.
- Final curing to bond layers.
-
Advantages:
- Comfortable interface with the skin.
- Structural integrity to withstand repeated use.
- Controlled stiffness gradient.
Mind Map: Layered Casting Process for Soft Robotic Sleeve
Best Practices for Multi-Material Fabrication
- Material Compatibility Testing: Ensure chemical and mechanical compatibility to avoid delamination.
- Design for Fabrication: Consider fabrication constraints early in the design phase.
- Optimize Adhesion: Use surface treatments or intermediate bonding layers if necessary.
- Iterative Prototyping: Rapidly prototype and test to refine material combinations and interfaces.
- Embedded Functionality: Plan sensor and actuator integration during fabrication to minimize post-processing.
Summary
Multi-material fabrication unlocks new possibilities for soft robotics in medical and wearable devices by enabling complex, multifunctional structures that meet stringent performance and comfort requirements. Leveraging advanced fabrication techniques and thoughtful material selection allows developers to create innovative devices tailored to user needs.
6.4 Rapid Prototyping: Iterative Design and Testing
Rapid prototyping is a cornerstone in the development of soft robotics for medical and wearable devices. It enables engineers and developers to quickly create, test, and refine designs, significantly reducing the time from concept to functional prototype. This iterative process is essential given the complex, flexible nature of soft materials and the critical performance requirements in medical applications.
Why Rapid Prototyping Matters in Soft Robotics
- Accelerates Development: Quickly transforms ideas into tangible models.
- Facilitates Design Validation: Allows early detection of design flaws.
- Enables User Feedback: Incorporates real-world usability insights.
- Supports Material and Actuation Testing: Helps optimize material choice and actuator performance.
Key Steps in Rapid Prototyping for Soft Robotics
Best Practices for Iterative Design and Testing
- Start Simple: Begin with basic geometries and simple actuators to validate core concepts.
- Modular Design: Create components that can be easily swapped or modified.
- Use Rapid Fabrication Techniques: Leverage 3D printing and soft molding for quick turnaround.
- Incorporate Realistic Testing Conditions: Simulate physiological environments when possible.
- Document Each Iteration: Keep detailed records of design changes and test outcomes.
Example: Iterative Development of a Soft Robotic Sleeve
Step 1: Initial Concept and CAD Modeling
- Designed a soft robotic sleeve aimed at assisting elbow flexion in stroke patients.
- Used CAD software to model a sleeve with embedded pneumatic chambers.
Step 2: Fabrication of First Prototype
- Employed silicone molding with 3D-printed molds.
- Integrated simple pneumatic tubing for actuation.
Step 3: Testing and Feedback
- Conducted bench tests to measure bending angle and force output.
- Performed initial user trials with healthy volunteers.
- Identified issues with sleeve fit and actuator responsiveness.
Step 4: Iteration and Refinement
- Modified chamber geometry to improve bending efficiency.
- Adjusted sleeve dimensions for better ergonomic fit.
- Switched to a softer silicone variant to enhance comfort.
Step 5: Second Prototype and Validation
- Fabricated updated sleeve using improved molds.
- Repeated mechanical and user testing.
- Achieved improved performance and user satisfaction.
Mind Map: Iterative Prototyping Workflow for Soft Robotic Sleeve
Tools and Technologies Supporting Rapid Prototyping
- 3D Printers: For molds and rigid components.
- Silicone Casting Kits: For soft elastomer parts.
- Laser Cutters: To create precise patterns for fabric or flexible substrates.
- Simulation Software: To predict deformation and stress before fabrication.
Additional Example: Soft Robotic Glove
- Initial Prototype: Simple finger actuators made from layered silicone sheets.
- Testing: Measured grasp force and finger range of motion.
- Iteration: Added embedded sensors for feedback; improved actuator layout for better dexterity.
- Outcome: Final prototype demonstrated improved assistance in hand rehabilitation tasks.
Summary
Rapid prototyping combined with iterative design and testing is vital in soft robotics development, especially for medical and wearable devices where user comfort, safety, and functionality are paramount. By embracing a cyclical process of design, fabrication, testing, and refinement, developers can efficiently optimize their devices to meet complex application demands.
6.5 Practical Example: Fabricating a Soft Robotic Sleeve
Fabricating a soft robotic sleeve involves a multidisciplinary approach combining material science, mechanical design, and fabrication techniques to create a wearable device that can assist or augment human limb movement. This section walks through the step-by-step process of designing and fabricating a soft robotic sleeve, highlighting best practices and providing clear examples.
Step 1: Define the Functional Requirements
Before fabrication, clearly outline the sleeve’s intended functions, such as:
- Assisting elbow flexion/extension
- Providing gentle compression for circulation
- Monitoring muscle activity
Example: Designing a sleeve to assist stroke patients with elbow movement during rehabilitation.
Step 2: Material Selection
Choose materials based on flexibility, durability, biocompatibility, and ease of fabrication.
- Elastomers: Silicone rubber (e.g., Ecoflex, Dragon Skin) for flexibility and skin safety
- Fabric base: Breathable textiles for comfort
- Reinforcements: Nylon or Kevlar fibers for directional stiffness
Example: Using Ecoflex 00-30 for actuator chambers and a nylon sleeve as the base.
Step 3: Design the Actuation Mechanism
Common actuation methods for soft sleeves include pneumatic chambers, cable-driven tendons, or shape memory alloys.
- Pneumatic actuators inflate to create bending
- Cable-driven systems pull to mimic muscle contraction
Example: Designing a pneumatic actuator array along the elbow joint to assist bending.
Step 4: Create the Mold and Pattern
Use CAD software to design molds for casting silicone actuators.
- Design molds with channels for air input
- Include features for consistent wall thickness
Mind Map: Mold Design Considerations
Example: 3D printing a two-part mold for a finger flexion actuator.
Step 5: Fabrication Process
- Mix and degas silicone: To remove bubbles for uniformity
- Pour silicone into mold: Ensure even filling
- Cure silicone: Typically 4-6 hours at room temperature or accelerated at 60°C
- Demold carefully: Avoid tearing soft parts
- Assemble actuators onto fabric base: Use adhesive or sewing
- Integrate tubing and sensors: For pneumatic control and feedback
Step 6: Integration and Testing
- Connect pneumatic lines to a control system
- Test actuator inflation and deflation cycles
- Measure bending angles and force output
- Adjust design based on performance
Example: Testing a sleeve prototype on a healthy volunteer to measure elbow flexion assistance.
Mind Map: Soft Robotic Sleeve Fabrication Workflow
Best Practices
- Iterative prototyping: Start with simple actuator shapes and refine based on testing.
- User comfort: Prioritize breathable fabrics and ergonomic design.
- Modularity: Design actuators to be replaceable for easy maintenance.
- Safety: Ensure all materials are biocompatible and avoid sharp edges.
Additional Example: Cable-Driven Soft Sleeve
Instead of pneumatic actuation, a soft sleeve can use cable-driven tendons embedded in a fabric sleeve. Pulling cables via small motors can mimic muscle contraction.
- Advantages: No need for bulky air pumps
- Challenges: Precise cable routing and tension control
Summary
Fabricating a soft robotic sleeve is a complex but manageable process when broken down into clear steps. By combining appropriate materials, careful mold design, and iterative testing, developers can create effective wearable devices that enhance mobility and provide therapeutic benefits.
References:
- Polygerinos, P., et al. “Soft robotic glove for combined assistance and at-home rehabilitation.” Robotics and Autonomous Systems 73 (2015): 135-143.
- Shepherd, R. F., et al. “Multigait soft robot.” Proceedings of the National Academy of Sciences 108.51 (2011): 20400-20403.
7. Control Strategies and Software Integration
7.1 Control Architectures for Soft Medical Robots
Soft medical robots present unique challenges in control system design due to their inherent compliance, nonlinear dynamics, and complex deformation behaviors. Effective control architectures must accommodate these characteristics while ensuring safety, precision, and adaptability in medical environments.
Key Concepts in Soft Robot Control Architectures
- Compliance and Nonlinearity: Soft robots deform continuously, making traditional rigid-body control models insufficient.
- High Degrees of Freedom (DoF): Soft robots often have infinite DoF, requiring simplified or reduced-order models.
- Sensor Integration: Feedback from embedded sensors is crucial for real-time control.
- Safety and Adaptability: Medical applications demand fail-safe and adaptive control strategies.
Common Control Architectures
Open-Loop Control
- Description: Commands are sent without feedback.
- Use Case: Simple soft actuators with predictable responses.
- Example: Inflating a soft pneumatic actuator to a fixed pressure for a one-time movement.
Closed-Loop Control
- Description: Uses sensor feedback to adjust commands dynamically.
- Use Case: Precise movement in rehabilitation devices.
- Example: Soft robotic glove adjusting finger flexion based on bend sensor data.
Model-Based Control
- Description: Utilizes mathematical models of soft robot dynamics.
- Use Case: Complex tasks requiring predictive control.
- Example: Finite Element Analysis (FEA)-informed control of a soft exosuit.
Learning-Based Control
- Description: Employs machine learning to adapt control policies.
- Use Case: Personalized assistance adapting to patient-specific movements.
- Example: Reinforcement learning to optimize gait assistance in a soft wearable.
Mind Map: Control Architecture Overview
Hybrid Control Architectures
Combining multiple control strategies can leverage their strengths:
- Example: A soft robotic hand uses model-based control for gross positioning and learning-based control for fine manipulation.
- Benefit: Improves robustness and adaptability.
Example: Control Architecture in a Soft Pneumatic Exosuit
- Sensors: Embedded pressure sensors and inertial measurement units (IMUs).
- Control Loop: Closed-loop PID controller adjusts air pressure based on sensor feedback.
- Modeling: Simplified kinematic model predicts actuator behavior.
- Adaptation: Machine learning module refines control parameters over time based on user gait patterns.
Mind Map: Example - Soft Pneumatic Exosuit Control
Best Practices for Designing Control Architectures
- Incorporate Multimodal Sensing: Combine pressure, strain, and motion sensors for comprehensive feedback.
- Use Simplified Models: Balance model complexity with computational efficiency.
- Implement Safety Layers: Include fail-safes and emergency stop mechanisms.
- Iterative Testing: Validate control strategies with real users and adjust accordingly.
- Leverage Machine Learning Carefully: Ensure transparency and reliability in adaptive controls.
Summary
Control architectures for soft medical robots must be carefully designed to address the unique challenges posed by soft materials and medical application requirements. By combining open-loop, closed-loop, model-based, and learning-based strategies, developers can create responsive, safe, and effective soft robotic systems that enhance patient care and wearable device functionality.
7.2 Machine Learning and AI in Soft Robotics Control
Soft robotics, characterized by its compliant and flexible structures, presents unique challenges in control due to nonlinear dynamics, high degrees of freedom, and complex material behaviors. Machine Learning (ML) and Artificial Intelligence (AI) have emerged as powerful tools to address these challenges by enabling adaptive, data-driven control strategies that improve performance, robustness, and user interaction.
Why Use ML and AI in Soft Robotics Control?
- Nonlinear System Modeling: Traditional physics-based models often fall short in capturing the complex behaviors of soft materials. ML models can learn these nonlinearities directly from data.
- Adaptive Control: AI enables controllers to adapt to changing conditions, such as material fatigue or user variability.
- Sensor Fusion: AI algorithms can integrate multiple sensor inputs to provide accurate state estimation.
- Real-Time Decision Making: ML techniques can optimize control policies in real time for dynamic tasks.
Key Machine Learning Techniques in Soft Robotics Control
Example 1: Supervised Learning for Soft Pneumatic Actuator Control
Scenario: Controlling the bending angle of a soft pneumatic actuator where the relationship between input pressure and actuator deformation is nonlinear and affected by environmental factors.
Approach:
- Collect training data mapping input pressures to bending angles using embedded sensors.
- Train a regression model (e.g., Random Forest or Neural Network) to predict actuator state.
- Use the model to generate control inputs that achieve desired bending angles.
Outcome: Improved accuracy and responsiveness compared to classical PID control.
Example 2: Reinforcement Learning for Adaptive Gait in Soft Exosuits
Scenario: A soft wearable exosuit assisting lower limb movement needs to adapt to different walking speeds and terrains.
Approach:
- Define reward functions based on user comfort, energy efficiency, and gait stability.
- Use model-free reinforcement learning (e.g., Deep Q-Networks or Proximal Policy Optimization) to learn optimal actuation policies.
- Continuously update policies based on real-time feedback.
Outcome: Personalized assistance that adapts to user-specific gait patterns and environmental changes.
Example 3: Sensor Fusion Using Deep Learning for Soft Wearable Health Monitors
Scenario: A soft wearable device integrates multiple flexible sensors (pressure, strain, temperature) to monitor physiological signals.
Approach:
- Use Convolutional Neural Networks (CNNs) to extract features from raw sensor data.
- Fuse multimodal sensor inputs for robust estimation of heart rate, respiration, or muscle activity.
Outcome: Enhanced accuracy and noise resilience in physiological monitoring.
Mind Map: AI-Driven Control Workflow for Soft Robotics
Best Practices for Implementing ML and AI in Soft Robotics Control
- Start with High-Quality Data: Accurate sensor calibration and comprehensive datasets improve model reliability.
- Combine Physics-Based and Data-Driven Models: Hybrid models leverage domain knowledge and data efficiency.
- Prioritize Real-Time Capability: Optimize algorithms for low latency to ensure smooth control.
- Incorporate User Feedback: Use human-in-the-loop approaches to refine control policies.
- Ensure Safety and Robustness: Include fail-safes and uncertainty estimation in AI models.
Summary
Machine learning and AI are revolutionizing soft robotics control by enabling systems to learn complex behaviors, adapt to new conditions, and improve user interaction. By integrating these technologies thoughtfully, developers can create medical and wearable soft robots that are more effective, personalized, and reliable.
7.3 Software Tools and Simulation Platforms
In the design and development of soft robotics for medical and wearable devices, software tools and simulation platforms play a crucial role. They enable engineers and developers to model complex soft structures, predict behavior under various conditions, optimize designs, and reduce costly physical prototyping iterations.
Key Software Tools for Soft Robotics Design
- Finite Element Analysis (FEA) Software
- Abaqus
- COMSOL Multiphysics
- ANSYS
- Multibody Dynamics and Soft Body Simulation
- SOFA Framework
- MuJoCo
- Chrono::Engine
- CAD and Modeling Tools
- SolidWorks (with soft body plugins)
- Autodesk Fusion 360
- Rhino + Grasshopper
- Control and Simulation Environments
- MATLAB/Simulink
- ROS (Robot Operating System)
- Gazebo
- Machine Learning and Data Processing
- Python (TensorFlow, PyTorch)
- LabVIEW
Mind Map: Software Tools Categorization
Simulation Platforms: Detailed Overview
-
Abaqus
- Widely used for nonlinear FEA, especially suitable for hyperelastic materials common in soft robotics.
- Example: Simulating the deformation of a soft pneumatic actuator under varying pressures.
-
SOFA Framework
- Open-source framework dedicated to real-time simulation, especially in medical robotics.
- Supports soft tissue simulation and haptic feedback integration.
- Example: Modeling soft robotic surgical tools interacting with human tissue.
-
MuJoCo (Multi-Joint dynamics with Contact)
- Physics engine focused on fast and accurate simulation of articulated structures.
- Useful for soft robotics with embedded rigid components.
- Example: Simulating a soft exosuit with rigid sensors and actuators.
-
MATLAB/Simulink
- Provides extensive toolboxes for control system design and simulation.
- Can integrate custom soft robot models with control algorithms.
- Example: Designing closed-loop control for a soft wearable device.
-
ROS + Gazebo
- ROS offers middleware for robot software development.
- Gazebo provides 3D simulation with physics engines.
- Example: Testing sensor integration and control strategies for a soft robotic glove.
Mind Map: Simulation Workflow for Soft Robotics
Example: Simulating a Soft Pneumatic Actuator in Abaqus
Step 1: Define the actuator geometry in CAD and import into Abaqus.
Step 2: Assign hyperelastic material properties based on silicone rubber characterization.
Step 3: Apply internal pressure boundary conditions to simulate inflation.
Step 4: Run nonlinear static analysis to observe deformation and stress distribution.
Step 5: Analyze results to identify stress concentrations and optimize wall thickness.
Outcome: Reduced material usage while maintaining required bending performance.
Example: Real-Time Interaction Simulation with SOFA
Scenario: Designing a soft robotic gripper for delicate tissue manipulation.
- Use SOFA to model soft gripper fingers with realistic tissue interaction.
- Integrate haptic feedback to simulate force sensing.
- Test different gripping strategies and control inputs.
Benefit: Enables iterative design with realistic interaction before physical prototyping.
Best Practices for Using Software Tools and Simulation Platforms
- Start with Simplified Models: Begin with 2D or simplified 3D models to reduce computation time.
- Validate Simulations with Experiments: Always compare simulation results with physical tests for accuracy.
- Leverage Multiphysics Capabilities: Use platforms that can simulate coupled phenomena (e.g., fluid-structure interaction).
- Integrate Control and Simulation: Combine mechanical simulation with control algorithms early in the design phase.
- Utilize Open-Source Tools: Frameworks like SOFA provide flexibility and community support.
By effectively leveraging these software tools and simulation platforms, mechanical and biomedical engineers can accelerate the development of innovative, reliable, and safe soft robotic medical and wearable devices.
7.4 User Interface Design for Wearable Soft Robots
Designing an effective user interface (UI) for wearable soft robots is crucial to ensure usability, comfort, and seamless interaction between the user and the device. The UI must accommodate the unique characteristics of soft robotics—such as flexibility, adaptability, and intimate contact with the human body—while providing intuitive control and feedback mechanisms.
Key Considerations in UI Design for Wearable Soft Robots
- User-Centered Design: Prioritize the needs, preferences, and limitations of end users, including patients, clinicians, and caregivers.
- Ergonomics and Comfort: UI elements should not interfere with the soft robot’s flexibility or cause discomfort.
- Accessibility: Interfaces must be usable by people with varying levels of mobility or cognitive ability.
- Real-Time Feedback: Provide clear, timely information about device status and performance.
- Simplicity and Intuitiveness: Minimize cognitive load with straightforward controls.
Mind Map: Core Components of UI Design for Wearable Soft Robots
Input Methods Explained with Examples
-
Physical Buttons: Simple, tactile buttons embedded on the wearable device or a remote controller.
- Example: A soft robotic exosuit for hand rehabilitation uses a small button panel on the wristband to toggle assistance modes.
-
Touch Interfaces: Capacitive or resistive touchpads integrated into fabric or flexible substrates.
- Example: A soft robotic sleeve includes a flexible touch slider to adjust compression levels.
-
Voice Commands: Hands-free control via voice recognition.
- Example: A wearable soft robotic vest responds to voice commands to increase or decrease support during physical therapy.
-
Gesture Recognition: Sensors detect user gestures to control the device.
- Example: A soft robotic glove interprets finger movements to activate different assistance modes.
-
Mobile App Controls: Smartphones or tablets provide rich UI for control, customization, and monitoring.
- Example: A mobile app connected via Bluetooth allows a user to customize the actuation patterns of a soft robotic ankle assist device.
Feedback Mechanisms with Examples
-
Visual Feedback:
- LEDs indicating power status or mode.
- Smartphone app dashboards showing real-time metrics.
- Example: A soft robotic knee brace uses multi-color LEDs to indicate battery level and assistance mode.
-
Haptic Feedback:
- Vibrations to signal mode changes or alerts.
- Pressure changes felt through the soft robot to indicate engagement.
- Example: A soft robotic glove provides gentle vibrations when the desired grip strength is reached.
-
Auditory Feedback:
- Simple beeps for button presses.
- Voice prompts for status updates.
- Example: A wearable soft exosuit emits a beep when switching between walking assistance modes.
Example Case Study: UI Design for a Soft Robotic Hand Rehabilitation Glove
Context: Patients recovering from stroke use a soft robotic glove to assist finger movement during therapy.
UI Features:
- Input: Mobile app with simple start/stop buttons and sliders to adjust assistance intensity.
- Feedback: Real-time visual graphs of finger movement on the app; haptic vibration on the glove to confirm commands.
- Customization: User profiles store preferred settings; therapists can remotely adjust parameters.
- Safety: Emergency stop button on the glove; app alerts if unusual resistance is detected.
Outcome: Patients report higher engagement and easier control, improving therapy adherence.
Mind Map: Designing for Accessibility and Safety
Best Practices Summary
- Engage end-users early and throughout the design process.
- Use multimodal input and feedback to accommodate different user needs.
- Prioritize comfort and do not compromise the soft robot’s mechanical function.
- Implement clear safety features and fail-safes.
- Leverage mobile and cloud technologies for enhanced control and monitoring.
By integrating these principles and examples, mechanical and biomedical engineers can create user interfaces that enhance the effectiveness and adoption of wearable soft robotic devices in medical applications.
7.5 Case Study: Adaptive Control in a Soft Exoskeleton
Adaptive control in soft exoskeletons represents a cutting-edge approach to enhance user comfort, performance, and safety by dynamically adjusting actuator behavior in response to real-time feedback. This case study explores the design, implementation, and evaluation of an adaptive control system integrated into a soft exoskeleton intended for lower-limb assistance during rehabilitation and daily activities.
Overview of the Soft Exoskeleton
- Purpose: Assist patients with mobility impairments by providing adjustable support during walking and standing.
- Design: Soft pneumatic actuators embedded in a wearable textile frame, focusing on hip and knee joints.
- Sensors: Embedded flexible strain sensors and inertial measurement units (IMUs) for motion and force feedback.
Adaptive Control Objectives
- Real-time adjustment of actuator pressure to match user intention and movement.
- Compensation for fatigue and changing biomechanics during prolonged use.
- Ensuring safety by preventing excessive force or unnatural joint angles.
Mind Map: Adaptive Control System Components
Example: Implementing Model Reference Adaptive Control (MRAC)
- Concept: The system uses a reference model representing desired joint trajectories.
- Process: The controller continuously compares actual joint angles (from IMUs) with the reference and adjusts actuator pressures to minimize error.
- Benefit: Automatically adapts to variations in user movement and external disturbances.
Mind Map: MRAC Workflow
Practical Example: Adaptive Gait Assistance
- Scenario: A user starts walking with the exoskeleton; initial actuator pressure is set based on baseline calibration.
- Observation: As the user tires, gait patterns change (detected by sensors).
- Adaptive Response: Control system increases actuator support subtly to maintain gait stability without hindering natural movement.
- Outcome: User experiences less fatigue and improved walking endurance.
Integration of Machine Learning for Predictive Control
- Approach: Train a model on sensor data to predict user intention and required actuator force.
- Example: Using recurrent neural networks (RNNs) to forecast joint angles and adjust actuator commands proactively.
- Benefit: Enhances responsiveness and smoothness of assistance.
Mind Map: Machine Learning-Based Adaptive Control
Challenges and Solutions
| Challenge | Solution Example |
|---|---|
| Sensor Noise and Drift | Implement sensor fusion and filtering algorithms (e.g., Kalman filters) |
| Time Delay in Actuation | Use predictive control to compensate delays |
| User Variability | Personalize control parameters via initial calibration and ongoing adaptation |
| Safety Concerns | Incorporate safety thresholds and emergency stop mechanisms |
Summary
Adaptive control in soft exoskeletons leverages sensor feedback and advanced algorithms to provide personalized, responsive assistance. By integrating MRAC and machine learning techniques, developers can create devices that adapt seamlessly to user needs, improving rehabilitation outcomes and daily mobility.
References and Further Reading
- Polygerinos, P., et al. “Soft Robotic Exosuits: A Review of Design and Control.” IEEE Robotics & Automation Magazine, 2020.
- Walsh, C. J., et al. “Soft Exosuits for Assistive and Augmentative Wearable Robotics.” Annual Review of Control, Robotics, and Autonomous Systems, 2018.
- Kim, J., et al. “Machine Learning-Based Adaptive Control for Soft Wearable Robots.” Soft Robotics Journal, 2022.
8. Safety, Reliability, and Regulatory Considerations
8.1 Risk Assessment in Soft Medical Devices
Risk assessment is a critical process in the development of soft medical devices, ensuring patient safety, device reliability, and regulatory compliance. Given the unique properties of soft robotics—such as flexibility, compliance, and interaction with biological tissues—risk assessment must address both traditional medical device concerns and those specific to soft materials and actuation.
Key Components of Risk Assessment
- Hazard Identification: Recognizing potential sources of harm.
- Risk Analysis: Estimating the likelihood and severity of harm.
- Risk Evaluation: Comparing risk levels against acceptable criteria.
- Risk Control: Implementing measures to mitigate or eliminate risks.
Mind Map: Risk Assessment Process for Soft Medical Devices
Hazard Identification in Soft Medical Devices
Soft medical devices often interact intimately with the human body, which introduces unique hazards:
-
Mechanical Hazards: Despite softness, devices can exert forces that may pinch, compress, or cause discomfort. For example, a soft robotic glove used in rehabilitation must avoid applying excessive force that could injure fragile tissues.
-
Material Hazards: Materials must be biocompatible. Silicone elastomers are common, but additives or curing agents might cause allergic reactions. For instance, a soft exosuit worn for extended periods must use hypoallergenic materials.
-
Electrical Hazards: Embedded sensors and actuators require power. Risks include electrical shocks or burns if insulation fails.
-
Functional Hazards: Failure modes such as actuator malfunction or unintended movements can cause harm or reduce therapeutic effectiveness.
Mind Map: Examples of Hazards in Soft Medical Devices
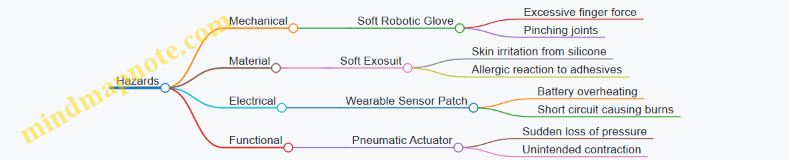
Risk Analysis and Evaluation
Risk is typically quantified as the product of the likelihood of occurrence and the severity of harm. For soft medical devices, this involves:
-
Likelihood: How often might a hazard occur? For example, how frequently might a pneumatic actuator leak?
-
Severity: What is the potential impact? Could it cause minor discomfort or serious injury?
Example:
| Hazard | Likelihood | Severity | Risk Level |
|---|---|---|---|
| Excessive force by glove | Low | Moderate injury | Medium |
| Material allergy | Medium | Mild irritation | Low-Medium |
| Electrical short circuit | Rare | Severe injury | Medium |
Risk evaluation compares these levels to acceptable thresholds defined by standards such as ISO 14971 (Medical Device Risk Management).
Risk Control Strategies
Effective risk control integrates design, testing, and user considerations:
-
Design Modifications: Incorporate force limiters or pressure sensors to prevent excessive force.
-
Material Selection: Use certified biocompatible materials and hypoallergenic adhesives.
-
Safety Features: Electrical insulation, redundant sensors, and emergency stop mechanisms.
-
User Training: Educate clinicians and patients on proper use and maintenance.
-
Maintenance Protocols: Regular inspection for wear, leaks, or electrical faults.
Example:
A soft robotic sleeve designed for arm rehabilitation includes embedded pressure sensors that automatically reduce actuator pressure if excessive force is detected, preventing injury.
Mind Map: Risk Control Measures
Practical Example: Risk Assessment of a Soft Robotic Glove
-
Hazard Identification: Potential for finger joint pinching, allergic reaction to silicone, actuator failure causing unintended finger movement.
-
Risk Analysis: Pinching likelihood low but severity moderate; allergy likelihood medium but severity low; actuator failure rare but severity high.
-
Risk Evaluation: Pinching and allergy risks acceptable with controls; actuator failure requires mitigation.
-
Risk Control: Add soft padding at joints, use medical-grade silicone, implement actuator feedback control with emergency stop.
-
Verification: Conduct user trials and mechanical testing to confirm risk controls are effective.
Summary
Risk assessment in soft medical devices is a multidisciplinary effort that balances innovative design with patient safety. By systematically identifying hazards, analyzing risks, and implementing controls—supported by real-world examples and iterative testing—developers can create safe, effective soft robotic medical and wearable devices.
8.2 Ensuring Reliability and Durability in Soft Robotics
Ensuring reliability and durability in soft robotics, especially for medical and wearable devices, is critical due to the direct impact on patient safety, device performance, and long-term usability. Unlike rigid robots, soft robots face unique challenges such as material fatigue, environmental degradation, and complex mechanical stresses that can compromise their lifespan.
Key Factors Affecting Reliability and Durability
- Material Fatigue and Wear: Soft materials like silicones and elastomers can degrade over repeated cycles.
- Mechanical Stress and Strain: Continuous bending, stretching, and compression can cause micro-tears.
- Environmental Exposure: Sweat, moisture, temperature fluctuations, and UV exposure impact material integrity.
- Manufacturing Defects: Inconsistencies in fabrication can lead to weak points.
- Integration of Electronics and Sensors: Flexible electronics must maintain functionality without damage.
Mind Map: Factors Influencing Reliability and Durability
Best Practices for Enhancing Reliability and Durability
Material Selection and Testing
- Use materials with proven fatigue resistance and biocompatibility.
- Perform accelerated aging tests simulating real-world conditions.
Example: For a soft robotic glove used in rehabilitation, selecting a platinum-cured silicone with high tear strength and conducting cyclic stretching tests over 100,000 cycles helps ensure longevity.
Mechanical Design Optimization
- Incorporate strain relief features such as folds or corrugations to reduce stress concentration.
- Design actuators and joints to distribute loads evenly.
Example: A soft exosuit uses segmented pneumatic chambers with flexible joints to minimize localized strain, extending operational life.
Protective Coatings and Encapsulation
- Apply biocompatible coatings to protect against moisture and contaminants.
- Use encapsulation techniques for embedded electronics to prevent corrosion.
Example: A wearable soft sensor array is encapsulated in a thin polyurethane layer, protecting sensors from sweat without compromising flexibility.
Quality Control in Fabrication
- Implement rigorous inspection protocols to detect defects early.
- Use repeatable molding or 3D printing processes with tight tolerances.
Example: During fabrication of a soft robotic sleeve, each batch undergoes dimensional verification and leak testing to ensure consistency.
Real-Time Monitoring and Maintenance
- Integrate sensors to monitor strain, temperature, and wear indicators.
- Develop predictive maintenance algorithms to alert users before failure.
Example: A soft robotic prosthetic incorporates embedded strain gauges that signal when material fatigue reaches a critical threshold, prompting maintenance.
Mind Map: Best Practices for Reliability and Durability
Example Case Study: Soft Robotic Assistive Glove
Context: A soft robotic glove designed to assist stroke patients with hand mobility.
Challenges: Frequent bending and stretching during daily use, exposure to sweat and skin oils, embedded sensors for motion tracking.
Approach:
- Material: Used a high tear-strength silicone elastomer.
- Design: Incorporated accordion-like folds at finger joints to reduce stress.
- Protection: Applied a hydrophobic coating to repel moisture.
- Fabrication: Employed precision molding with in-process inspection.
- Monitoring: Embedded flexible strain sensors with real-time feedback.
Outcome: The glove sustained over 150,000 cycles of use without significant degradation, maintaining sensor accuracy and mechanical integrity.
Summary
Ensuring reliability and durability in soft robotics for medical and wearable devices requires a multidisciplinary approach. By carefully selecting materials, optimizing mechanical design, protecting components, enforcing strict fabrication quality, and integrating real-time monitoring, developers can create devices that are safe, effective, and long-lasting.
This approach not only improves patient outcomes but also reduces maintenance costs and enhances user trust in soft robotic technologies.
8.3 Regulatory Pathways for Medical Soft Robots
Medical soft robots, due to their innovative nature and direct interaction with patients, must comply with stringent regulatory frameworks to ensure safety, efficacy, and quality. Understanding these regulatory pathways is crucial for biomedical engineers, device developers, and mechanical engineers working in this field.
Overview of Regulatory Bodies and Standards
- FDA (U.S. Food and Drug Administration): Primary regulatory body in the United States overseeing medical devices.
- EMA (European Medicines Agency) & MDR (Medical Device Regulation): Governs medical devices in the European Union.
- ISO Standards: International standards such as ISO 13485 (Quality Management Systems), ISO 10993 (Biocompatibility), and ISO 14971 (Risk Management).
Mind Map: Regulatory Landscape for Medical Soft Robots
Device Classification and Its Impact
Medical soft robots can range from wearable rehabilitation devices to implantable soft robotic prosthetics. Their classification determines the regulatory requirements:
- Class I: Low risk devices, e.g., simple soft robotic sleeves for support.
- Class II: Moderate risk, e.g., soft robotic gloves for hand therapy.
- Class III: High risk, e.g., implantable soft robotic devices or those used in critical surgical interventions.
Example: A soft robotic exosuit designed to assist gait might be Class II, requiring a 510(k) submission in the U.S., demonstrating substantial equivalence to a predicate device.
Premarket Submission Pathways
- 510(k) Clearance: Demonstrate that the device is substantially equivalent to an existing legally marketed device.
- Premarket Approval (PMA): Required for Class III devices; involves extensive clinical data and rigorous review.
Example: A novel soft robotic surgical tool with no predicate device would likely require PMA due to its innovative nature and high risk.
Quality Management and Risk Management
- Compliance with ISO 13485 ensures a robust quality management system.
- ISO 14971 guides risk management processes, critical for soft robots due to their complex interactions with human tissue.
Example: During development of a soft robotic prosthetic hand, risk analysis must identify potential failure modes such as material degradation or actuator malfunction and mitigate them accordingly.
Biocompatibility and Safety Testing
Soft robotics often use novel materials; thus, biocompatibility testing per ISO 10993 is essential.
Example: Silicone elastomers used in soft robotic gloves must be tested for cytotoxicity, sensitization, and irritation to ensure patient safety.
Software and Control Systems Regulation
Many soft robots rely on embedded software for actuation and sensing.
- Software may be regulated as Software as a Medical Device (SaMD).
- Compliance with FDA guidance on software validation and cybersecurity is critical.
Example: The control firmware in a soft robotic exosuit must undergo rigorous verification and validation to meet regulatory standards.
Post-market Surveillance and Reporting
Once on the market, continuous monitoring for adverse events and device performance is required.
Example: A wearable soft robotic device manufacturer must implement a system to collect user feedback and report any malfunctions to regulatory authorities.
Mind Map: Regulatory Submission Workflow for a Soft Medical Robot
Example: Navigating FDA Clearance for a Soft Robotic Glove
- Classification: Determined as Class II medical device.
- Predicate Device Identification: Existing rehabilitation gloves.
- Risk Analysis: Conducted per ISO 14971.
- Biocompatibility Testing: Per ISO 10993 for materials.
- Software Validation: Control software tested and documented.
- 510(k) Submission: Includes all technical documentation.
- FDA Review: Interaction and responses to questions.
- Clearance Received: Device marketed with appropriate labeling.
Summary
Navigating regulatory pathways for medical soft robots requires a multidisciplinary approach combining engineering, clinical understanding, and regulatory expertise. Early engagement with regulatory bodies and adherence to international standards streamline the approval process and ensure patient safety.
For device developers and engineers, integrating regulatory considerations early in the design process is a best practice that reduces costly redesigns and accelerates time-to-market.
8.4 Ethical Considerations in Wearable Soft Robotics
Wearable soft robotics, especially in medical applications, introduces a unique set of ethical considerations that engineers, developers, and clinicians must address to ensure responsible innovation and deployment. These considerations span privacy, autonomy, accessibility, and long-term societal impacts.
Key Ethical Themes in Wearable Soft Robotics
Privacy
Wearable soft robots often collect sensitive physiological and behavioral data. Protecting this data is paramount.
- Data Collection: Devices must limit data collection to what is strictly necessary.
- Data Security: Strong encryption and secure storage protocols should be implemented.
- User Consent: Transparent consent processes must inform users about what data is collected and how it is used.
Example: A soft robotic sleeve for stroke rehabilitation collects muscle activity data. Developers implemented end-to-end encryption and allowed users to control data sharing preferences via an app.
Autonomy
Maintaining user autonomy is critical to avoid over-dependence or loss of control.
- User Control: Devices should allow users to override or adjust assistance levels.
- Dependency Risks: Designers should consider how prolonged use might affect natural abilities.
- Informed Decision-Making: Users must understand device capabilities and limitations.
Example: A soft exosuit designed for gait assistance includes manual control modes and alerts users when assistance is active, empowering informed use.
Accessibility
Ethical design promotes equitable access to wearable soft robotics.
- Affordability: Cost-effective materials and manufacturing can reduce barriers.
- Inclusivity: Designs should accommodate diverse body types, ages, and abilities.
- Global Reach: Consideration of different healthcare infrastructures and cultural contexts.
Example: A low-cost soft robotic glove prototype uses widely available silicone materials and adjustable sizing to fit various hand sizes, targeting underserved communities.
Safety
Ensuring physical and psychological safety is fundamental.
- Physical Harm: Soft materials reduce injury risk, but device malfunction can still cause harm.
- Psychological Impact: Users may experience frustration or stigma; designs should minimize these effects.
Example: A soft robotic wearable for tremor suppression includes fail-safe mechanisms to prevent excessive force and provides positive feedback to encourage user confidence.
Transparency
Clear communication about device operation and data use builds trust.
- Algorithmic Transparency: Users should understand how control algorithms make decisions.
- Clear Communication: User manuals and interfaces must be comprehensible.
Example: Developers of a soft wearable cardiac assist device published simplified algorithm descriptions and provided interactive tutorials for patients.
Social Impact
Consideration of broader societal effects is essential.
- Employment: Automation may affect jobs in caregiving.
- Social Stigma: Visible devices might lead to discrimination.
- Equity: Ensuring benefits do not exacerbate existing inequalities.
Example: A community program introduced soft wearable rehabilitation devices alongside education campaigns to reduce stigma and promote acceptance.
Integrated Mind Map: Ethical Framework for Wearable Soft Robotics
Summary
Ethical considerations in wearable soft robotics require a multidisciplinary approach involving engineers, clinicians, ethicists, and users. By embedding privacy, autonomy, accessibility, safety, transparency, and social impact into the design and deployment process, developers can create devices that not only improve health outcomes but also respect and empower users.
Further Reading and Resources
- IEEE Global Initiative on Ethics of Autonomous and Intelligent Systems
- FDA Guidance on Medical Device Data Systems
- “Ethics of Wearable Robots” - Journal of Medical Robotics Research
This section encourages mechanical and biomedical engineers, as well as device developers, to integrate ethical frameworks early in the design process to foster responsible innovation in wearable soft robotics.
8.5 Example: Compliance Strategy for a Soft Robotic Prosthetic
Designing a compliance strategy for a soft robotic prosthetic is crucial to ensure the device meets safety, reliability, and regulatory standards while providing effective and comfortable user experience. This section explores a comprehensive approach to compliance, illustrated with practical examples and mind maps to guide mechanical engineers, biomedical engineers, and device developers.
Understanding Compliance in Soft Robotic Prosthetics
Compliance here refers to the adherence to regulatory requirements, safety standards, and best engineering practices that govern medical devices. For soft robotic prosthetics, this includes material biocompatibility, mechanical reliability, user safety, and regulatory approvals.
Key Components of a Compliance Strategy
Compliance Strategy Mind Map
Step 1: Regulatory Landscape Analysis
- Example: For a soft robotic prosthetic hand intended for the US market, the FDA’s 510(k) pathway is commonly used. The device must demonstrate substantial equivalence to a predicate device.
- Best Practice: Early engagement with regulatory consultants and submission of a pre-submission request to FDA can clarify requirements.
Step 2: Risk Management and Safety Testing
- Conduct a thorough Hazard Analysis identifying potential risks such as mechanical failure, electrical hazards, or allergic reactions.
- Use FMEA to prioritize risks and develop mitigation strategies.
Example: A soft robotic prosthetic glove undergoes testing for pinch force limits to avoid user injury.
Risk Management Mind Map
Step 3: Material Selection and Biocompatibility
- Select materials compliant with ISO 10993 standards for biocompatibility.
- Perform cytotoxicity, sensitization, and irritation tests.
Example: Silicone elastomers used in the prosthetic socket are tested for skin irritation over prolonged contact.
Step 4: Mechanical Reliability Testing
- Perform fatigue and durability tests simulating real-world use cycles.
- Test actuator lifespan under expected loading conditions.
Example: A pneumatic soft actuator in the prosthetic undergoes 100,000 cycles of inflation and deflation to validate longevity.
Step 5: Documentation and Traceability
- Maintain comprehensive Design History File (DHF) documenting design decisions, testing results, and changes.
- Prepare Device Master Record (DMR) including manufacturing processes and quality control.
Step 6: User Training and Post-Market Surveillance
- Develop clear user manuals emphasizing safe operation and maintenance.
- Implement post-market surveillance to monitor device performance and adverse events.
Example: A training program for clinicians and users includes hands-on sessions and troubleshooting guides.
Integrated Example: Compliance Strategy for “SoftHand Pro” Prosthetic
Summary
A robust compliance strategy for soft robotic prosthetics integrates regulatory understanding, risk management, material safety, mechanical reliability, thorough documentation, and user education. This holistic approach not only ensures device approval but also enhances user trust and device performance.
By following these best practices and learning from real-world examples, engineers and developers can streamline the path from concept to market-ready soft robotic prosthetic devices.
9. Applications and Case Studies in Medical Soft Robotics
9.1 Soft Robotics in Rehabilitation and Physical Therapy
Soft robotics has revolutionized rehabilitation and physical therapy by offering adaptable, compliant, and patient-friendly devices that assist in motor recovery, pain reduction, and functional improvement. Unlike rigid robotic systems, soft robots conform to the human body, providing safer and more comfortable interaction, which is crucial in therapeutic settings.
Key Benefits of Soft Robotics in Rehabilitation
- Compliance and Safety: Soft materials reduce injury risk and adapt to patient movements.
- Customizability: Devices can be tailored to individual patient needs and anatomies.
- Lightweight and Wearable: Enhances patient comfort and encourages longer use.
- Enhanced Sensory Feedback: Integration of soft sensors allows real-time monitoring.
Mind Map: Applications of Soft Robotics in Rehabilitation
Example 1: Soft Robotic Glove for Stroke Rehabilitation
Description: A soft robotic glove uses pneumatic actuators made from silicone elastomers to assist finger flexion and extension. It helps stroke patients regain hand mobility by supporting repetitive movements with adjustable assistance levels.
Best Practices Demonstrated:
- Use of soft, biocompatible materials for patient comfort.
- Modular actuator design allowing customization per patient needs.
- Integration of flexible sensors to monitor finger position and force.
- Lightweight and ergonomic design encouraging prolonged therapy sessions.
Outcome: Clinical trials showed improved hand function and increased patient engagement compared to traditional rigid orthoses.
Mind Map: Design Considerations for Soft Robotic Gloves
Example 2: Soft Exosuit for Gait Assistance
Description: A soft exosuit designed to assist patients with lower limb weakness uses textile-based soft actuators to support hip and ankle movements during walking. It provides assistance without restricting natural motion.
Best Practices Demonstrated:
- Use of lightweight, flexible textiles for wearability.
- Soft actuation that complements rather than replaces muscle activity.
- Real-time sensor feedback for adaptive control.
- Easy donning and doffing to encourage daily use.
Outcome: Users experienced reduced metabolic cost during walking and improved gait symmetry.
Mind Map: Rehabilitation Goals Supported by Soft Robotics
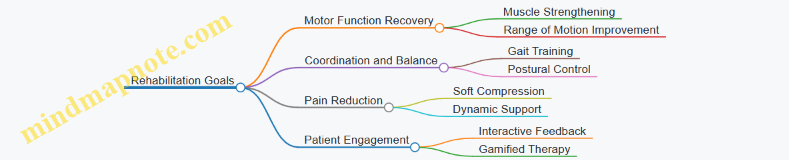
Example 3: Soft Wearable for Spasticity Management
Description: A soft robotic sleeve applying gentle, controlled compression and stretch to reduce muscle spasticity in cerebral palsy patients.
Best Practices Demonstrated:
- Adjustable pressure levels for personalized therapy.
- Use of soft, breathable fabrics to enhance comfort.
- Integration with mobile app for therapy tracking.
Outcome: Significant reduction in muscle stiffness and improved limb function reported.
Summary
Soft robotics offers transformative potential in rehabilitation and physical therapy by combining safety, adaptability, and patient-centric design. Through examples like soft robotic gloves, exosuits, and wearable compression devices, engineers and developers can draw inspiration to create innovative solutions that improve patient outcomes and quality of life.
9.2 Minimally Invasive Surgical Tools Using Soft Robotics
Minimally invasive surgery (MIS) has revolutionized the medical field by reducing patient trauma, shortening recovery times, and minimizing scarring. Soft robotics introduces a new paradigm in MIS by enabling tools that are compliant, adaptable, and safer for delicate tissues. This section explores the design principles, benefits, challenges, and real-world examples of soft robotic surgical tools.
Why Soft Robotics for Minimally Invasive Surgery?
- Compliance and Safety: Soft materials reduce the risk of tissue damage compared to rigid instruments.
- Adaptability: Soft robots can conform to complex anatomical structures.
- Dexterity: Enhanced maneuverability in confined spaces.
- Reduced Instrument Footprint: Smaller, flexible tools enable access through tiny incisions.
Key Design Considerations
- Material Selection: Biocompatible elastomers and hydrogels that can withstand sterilization.
- Actuation: Pneumatic, hydraulic, or electroactive polymer actuators that provide smooth, controllable motion.
- Sensing: Integration of flexible sensors for force feedback and position tracking.
- Control Systems: Precise closed-loop control to ensure safe interaction with tissues.
Mind Map: Core Components of Soft Robotic MIS Tools
Example 1: Soft Robotic Endoscope
A soft robotic endoscope uses a series of pneumatic chambers along its length to bend and twist, allowing surgeons to navigate complex pathways inside the body with minimal discomfort to the patient. The soft body reduces the risk of perforation and allows for safer exploration of delicate organs.
- Best Practice: Use multi-chamber pneumatic actuators with independent control to achieve multi-degree-of-freedom bending.
- Example: The Octopus-inspired soft robotic endoscope developed by researchers at Harvard uses fiber-reinforced elastomeric actuators to mimic natural flexibility.
Example 2: Soft Robotic Graspers for Tissue Manipulation
Traditional rigid graspers can cause tissue bruising or tearing. Soft robotic graspers use compliant materials and soft actuators to gently hold and manipulate tissues.
- Best Practice: Integrate soft tactile sensors to provide feedback on grasping force, preventing excessive pressure.
- Example: A soft robotic grasper developed for laparoscopic surgery uses silicone fingers actuated pneumatically, combined with embedded strain sensors for real-time force monitoring.
Mind Map: Workflow for Designing a Soft Robotic MIS Tool
Challenges and Solutions
| Challenge | Description | Soft Robotics Solution |
|---|---|---|
| Limited Force Output | Soft actuators may produce less force than rigid tools. | Use hybrid designs combining soft and rigid elements. |
| Sterilization Compatibility | Soft materials can degrade under harsh sterilization. | Select sterilization-friendly elastomers or disposable components. |
| Precise Control in Complex Environments | Soft robots have nonlinear behavior complicating control. | Implement advanced closed-loop control with sensor feedback. |
Future Directions
- Biohybrid Soft Robots: Incorporating living cells for self-healing and enhanced functionality.
- AI-Enhanced Control: Machine learning algorithms to predict and adapt tool behavior in real-time.
- Wireless Power and Control: Minimizing tethering to improve surgeon ergonomics.
Summary
Soft robotics offers transformative potential for minimally invasive surgical tools by combining safety, dexterity, and adaptability. Through thoughtful material selection, actuator design, sensor integration, and control strategies, developers can create next-generation surgical instruments that improve patient outcomes and expand surgical capabilities.
9.3 Soft Wearable Devices for Health Monitoring
Soft wearable devices have revolutionized health monitoring by offering comfortable, flexible, and adaptive interfaces that conform to the human body. These devices leverage soft robotics principles to provide continuous, real-time physiological data without compromising user comfort or mobility.
Key Advantages of Soft Wearable Devices
- Conformability: Soft materials adapt to complex body contours, reducing discomfort and improving sensor contact.
- Lightweight and Breathable: Enhances long-term wearability.
- Safety: Reduced risk of skin irritation or injury compared to rigid devices.
- Enhanced Sensitivity: Soft sensors can detect subtle physiological signals.
Mind Map: Core Components of Soft Wearable Health Monitoring Devices
Examples of Soft Wearable Devices for Health Monitoring
Soft Stretchable ECG Patch
- Description: A thin, stretchable patch embedded with soft electrodes that conform to the skin, enabling continuous electrocardiogram (ECG) monitoring.
- Best Practice: Use biocompatible silicone substrates with embedded conductive hydrogel electrodes to ensure stable skin contact and signal quality.
- Example: The ‘MC10 BioStamp’ system uses soft, stretchable electronics for ambulatory ECG monitoring.
Soft Respiratory Rate Monitor
- Description: A soft chest band embedded with flexible strain sensors that detect chest expansion and contraction.
- Best Practice: Integrate capacitive or piezoresistive sensors within a breathable fabric to maintain user comfort during long-term wear.
- Example: A soft wearable band developed with silicone-encapsulated strain sensors that wirelessly transmit respiratory data.
Soft Wearable Pulse Oximeter
- Description: A flexible finger ring or wristband with embedded optical sensors to measure blood oxygen saturation.
- Best Practice: Use soft elastomeric materials to maintain sensor alignment and reduce motion artifacts.
- Example: Soft photoplethysmography (PPG) sensors integrated into a silicone ring for continuous SpO2 monitoring.
Mind Map: Design Considerations for Soft Wearable Health Monitors
Integration of Soft Robotics Best Practices
- Material Selection: Choose biocompatible, stretchable materials like silicone elastomers or hydrogels to ensure skin safety and durability.
- Sensor Embedding: Embed flexible sensors within soft substrates to maintain signal fidelity during body movements.
- Wireless Communication: Incorporate low-power Bluetooth or NFC modules for seamless data transmission.
- User-Centered Design: Conduct iterative testing with target users to optimize comfort and usability.
Case Example: Soft Wearable for Continuous Blood Pressure Monitoring
- Concept: A soft, inflatable cuff integrated into a wearable sleeve that uses soft pneumatic actuators to apply gentle pressure and flexible sensors to measure arterial pulse waves.
- Implementation: Utilizing soft robotics actuation to mimic traditional cuff inflation without rigid components.
- Outcome: Improved patient comfort and ability to monitor blood pressure continuously during daily activities.
Summary
Soft wearable devices for health monitoring exemplify the fusion of soft robotics and biomedical engineering, providing non-invasive, comfortable, and reliable solutions for continuous physiological data acquisition. By carefully selecting materials, integrating flexible sensors, and focusing on user comfort, developers can create impactful devices that enhance patient care and wellness monitoring.
9.4 Pediatric and Geriatric Applications of Soft Robotics
Soft robotics offers transformative potential in addressing the unique medical and wearable needs of pediatric and geriatric populations. These groups often require devices that are gentle, adaptable, and safe due to their physiological vulnerabilities and diverse mobility or health challenges.
Key Considerations for Pediatric and Geriatric Soft Robotics
- Safety and Comfort: Devices must minimize risk of injury and maximize comfort.
- Adaptability: Growth in children and changing health conditions in elderly require adaptable designs.
- Lightweight and Flexible: To reduce fatigue and improve wearability.
- Ease of Use: Simple donning/doffing and intuitive controls.
Mind Map: Pediatric and Geriatric Soft Robotics Design Focus
Examples of Pediatric Applications
Soft Robotic Exosuits for Children with Cerebral Palsy
- Description: Lightweight, flexible exosuits that assist with gait and limb movement.
- Best Practice: Use of soft pneumatic actuators that provide gentle assistance without restricting natural motion.
- Example: A soft robotic ankle-foot orthosis that adapts to a child’s growth and provides real-time feedback to therapists.
Soft Robotic Gloves for Fine Motor Skill Development
- Description: Gloves that support finger movement and strength training.
- Best Practice: Integration of flexible sensors to monitor finger position and force, enabling personalized therapy.
- Example: A glove designed for children recovering from hand injuries, made with breathable silicone and adjustable straps.
Examples of Geriatric Applications
Wearable Soft Robotic Assistive Devices for Mobility
- Description: Soft exosuits that support walking and balance in elderly individuals with muscle weakness.
- Best Practice: Modular design allowing easy adjustment for different levels of assistance.
- Example: A soft robotic hip assist device that reduces load on joints and improves endurance during walking.
Soft Robotic Compression Sleeves for Circulation Improvement
- Description: Sleeves that provide gentle, rhythmic compression to improve blood flow and reduce edema.
- Best Practice: Use of soft, stretchable materials combined with pneumatic actuation for controlled pressure.
- Example: A compression sleeve for elderly patients with venous insufficiency, featuring embedded sensors to monitor pressure.
Mind Map: Functional Benefits Across Age Groups
Integrated Best Practices in Pediatric and Geriatric Soft Robotics
- Material Selection: Prioritize hypoallergenic, breathable, and lightweight materials such as medical-grade silicones and soft textiles.
- Customization: Employ modular and adjustable designs to accommodate growth in children and changing body shapes in elderly.
- Sensor Integration: Embed flexible sensors to track physiological and biomechanical data for personalized therapy and monitoring.
- User-Centered Design: Involve patients, caregivers, and clinicians early in the design process to ensure usability and acceptance.
- Safety Protocols: Implement fail-safes and soft actuation limits to prevent injury.
Case Study: Soft Robotic Sleeve for Pediatric Rehabilitation
- Objective: Assist children recovering from upper limb injuries with gentle support and movement guidance.
- Design Highlights: Soft pneumatic actuators integrated into a breathable sleeve; adjustable straps for growth; embedded flex sensors for motion tracking.
- Outcome: Improved range of motion and engagement in therapy sessions with high comfort ratings.
Summary
Soft robotics tailored for pediatric and geriatric populations must balance adaptability, safety, and comfort while delivering functional assistance and monitoring. By leveraging compliant materials, modular designs, and embedded sensing, developers can create devices that significantly improve quality of life and therapeutic outcomes for these vulnerable groups.
9.5 Detailed Case Study: Soft Robotic Hand for Stroke Recovery
Stroke often results in impaired hand function, limiting patients’ ability to perform daily tasks. Soft robotic hands offer a promising rehabilitation tool by providing assistive movement and promoting neuroplasticity through repetitive, controlled exercises.
Overview of the Soft Robotic Hand for Stroke Recovery
This case study explores the design, fabrication, and clinical application of a soft robotic hand developed to aid stroke survivors in regaining hand mobility and strength.
Key Objectives:
- Assist finger flexion and extension
- Provide adjustable assistance levels
- Ensure comfort and safety during prolonged use
Design Considerations
- Material Selection: Soft silicone elastomers for flexibility and skin safety
- Actuation: Pneumatic actuators to mimic natural finger movements
- Sensors: Embedded flexible bend sensors for real-time feedback
- Control: Closed-loop system adapting assistance based on patient effort
Mind Map: Design Components and Considerations
Fabrication Process
- Mold Design: CAD modeling of finger actuators
- Casting: Pouring silicone into molds with embedded air channels
- Sensor Integration: Placing flexible sensors on finger segments
- Assembly: Attaching actuators to a wearable glove base
Example: Pneumatic Finger Actuator
- Constructed using multi-layer silicone with internal air chambers
- Inflates to curl the finger mimicking natural flexion
- Deflates to allow finger extension
Control Strategy
- Sensors detect finger position and force
- Microcontroller adjusts air pressure to assist or resist movement
- Adaptive assistance encourages active patient participation
Mind Map: Control Loop Workflow
Clinical Application and Outcomes
- Patients used the device during therapy sessions
- Improved finger range of motion and grip strength observed
- High patient comfort and compliance reported
Example: Therapy Session Protocol
- Warm-up exercises without device
- Assisted finger flexion/extension with robotic hand
- Repetitive task practice (e.g., grasping objects)
- Cool-down and feedback collection
Best Practices Illustrated
- User-Centered Design: Adjustable assistance tailored to patient needs
- Iterative Prototyping: Multiple design cycles incorporating patient feedback
- Safety First: Soft materials and pressure limits to prevent injury
- Integrated Sensing: Real-time monitoring for adaptive control
Summary
The soft robotic hand for stroke recovery demonstrates how combining soft materials, pneumatic actuation, and sensor-driven control can create effective rehabilitation devices. This case study exemplifies best practices in design, fabrication, and clinical integration, offering a replicable model for developers in medical soft robotics.
Additional Resources
- Research Paper: Soft Robotic Gloves for Stroke Rehabilitation
- Open-Source Designs for Soft Pneumatic Actuators
- Tutorial: Integrating Flexible Sensors into Soft Robots
End of Case Study
10. Future Trends and Innovations
10.1 Emerging Materials and Technologies
The field of soft robotics is rapidly evolving, driven by continuous advancements in materials science and enabling technologies. Emerging materials and novel fabrication techniques are expanding the capabilities of soft robotic systems, particularly in medical and wearable devices, where flexibility, biocompatibility, and responsiveness are paramount.
Key Emerging Materials
-
Self-Healing Polymers
- Materials that autonomously repair damage, extending device lifespan.
- Example: A soft robotic sleeve that can recover from small tears during daily use, reducing maintenance.
-
Conductive Hydrogels
- Hydrated polymer networks with electrical conductivity.
- Example: Flexible sensors embedded in wearable devices for real-time physiological monitoring.
-
Liquid Crystal Elastomers (LCEs)
- Materials that change shape or stiffness in response to stimuli like heat or light.
- Example: Soft actuators that contract when exposed to body heat, enabling adaptive fit in prosthetics.
-
Biodegradable Polymers
- Materials that safely degrade in the body, ideal for temporary implants.
- Example: Soft robotic stents that dissolve after healing is complete.
-
Magnetoactive Elastomers
- Elastomers embedded with magnetic particles, allowing remote actuation via magnetic fields.
- Example: Minimally invasive soft surgical tools controlled externally without wires.
Enabling Technologies
-
4D Printing
- 3D printing of materials that change shape or properties over time or in response to stimuli.
- Example: Wearable devices that self-adjust their shape for comfort and function.
-
Nanocomposite Materials
- Polymers reinforced with nanoparticles to enhance mechanical, electrical, or thermal properties.
- Example: Soft robotic gloves with improved strength and tactile sensing.
-
Soft Bioelectronics Integration
- Embedding flexible circuits and sensors directly into soft substrates.
- Example: Continuous glucose monitoring patches with soft robotic components for enhanced skin conformity.
-
Advanced Microfluidics
- Miniaturized fluidic channels for precise control of pneumatic or hydraulic actuation.
- Example: Soft robotic fingers with microfluidic networks enabling delicate manipulation.
Mind Map: Emerging Materials in Soft Robotics
Mind Map: Enabling Technologies for Soft Robotics
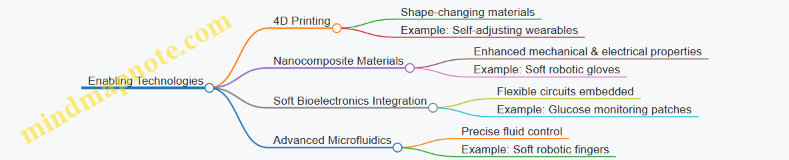
Detailed Examples
Example 1: Self-Healing Soft Robotic Sleeve for Rehabilitation
A rehabilitation sleeve designed with self-healing silicone-based polymers embedded with microcapsules containing healing agents. When minor cuts or abrasions occur, the capsules rupture and release agents that polymerize, repairing the damage. This reduces downtime and device replacement costs, critical for patients undergoing long-term therapy.
Example 2: Conductive Hydrogel Sensors in Wearable Health Monitors
Flexible conductive hydrogels integrated into a wearable patch can continuously monitor heart rate and muscle activity. Their softness ensures comfort and conformability to skin, while their conductivity allows accurate signal transmission. This technology enables unobtrusive, real-time health monitoring.
Example 3: Magnetoactive Elastomer-Based Minimally Invasive Surgical Tools
Soft surgical grippers fabricated from magnetoactive elastomers can be controlled externally by magnetic fields, eliminating the need for bulky wires or pneumatic lines. This allows surgeons to manipulate delicate tissues with high precision and minimal invasiveness.
Best Practices for Utilizing Emerging Materials and Technologies
- Material Compatibility: Ensure new materials are compatible with existing fabrication methods and device requirements.
- Biocompatibility Testing: Rigorously test materials for safety, especially for implantable or skin-contact devices.
- Iterative Prototyping: Use rapid prototyping to evaluate material performance in real-world scenarios.
- Multidisciplinary Collaboration: Engage materials scientists, engineers, and clinicians early in the design process.
Emerging materials and technologies are revolutionizing soft robotics, enabling medical and wearable devices that are more adaptive, durable, and functional. Staying abreast of these innovations and integrating them thoughtfully into designs will be key to advancing the field.
10.2 Integration of Soft Robotics with Bioelectronics
The integration of soft robotics with bioelectronics represents a transformative frontier in medical and wearable device development. By combining the compliant, adaptable nature of soft robotic structures with the sensing, processing, and actuation capabilities of bioelectronic components, engineers can create devices that interact seamlessly with the human body, enabling enhanced diagnostics, therapy, and user experience.
Key Concepts in Integration
- Soft Robotics: Utilizes flexible, stretchable materials and actuators to mimic biological tissues.
- Bioelectronics: Electronic systems designed to interface with biological systems, including sensors, stimulators, and signal processors.
- Hybrid Systems: Devices that merge soft mechanical elements with embedded bioelectronic circuits for real-time feedback and control.
Mind Map: Integration Overview
Practical Examples
Example 1: Soft Robotic Glove with Embedded EMG Sensors
- Description: A soft robotic glove designed for hand rehabilitation integrates flexible EMG sensors on the forearm to detect muscle signals.
- Integration: EMG sensors embedded in soft silicone layers transmit signals to an onboard microcontroller, which actuates pneumatic soft actuators to assist finger movement.
- Benefit: Real-time muscle activity monitoring enables adaptive assistance, improving therapy outcomes.
Example 2: Wearable Soft Patch for Cardiac Monitoring and Stimulation
- Description: A soft, stretchable patch adheres to the chest, embedding bioelectronic sensors to monitor cardiac signals and deliver electrical stimulation if arrhythmias are detected.
- Integration: Flexible electrodes and circuits are laminated within a soft elastomeric substrate, ensuring conformal contact and patient comfort.
- Benefit: Continuous monitoring combined with therapeutic intervention in a single wearable device.
Mind Map: Challenges and Solutions
Best Practices for Integration
- Material Compatibility: Use bio-compatible, flexible substrates for embedding electronics to maintain softness and comfort.
- Modular Design: Design soft robotic components and bioelectronic modules to be modular for easier maintenance and upgrades.
- Robust Encapsulation: Protect bioelectronic components from moisture and mechanical damage without compromising flexibility.
- Low-Power Electronics: Employ ultra-low-power sensors and processors to extend device operational time.
- User-Centered Design: Prioritize ergonomic and intuitive interfaces to enhance user compliance and device effectiveness.
Emerging Trends
- Stretchable Batteries and Energy Harvesters: Powering soft-bioelectronic devices without bulky batteries.
- Neural Interfaces: Soft robotic devices integrated with neural bioelectronics for advanced prosthetic control.
- Wireless Closed-Loop Systems: Real-time sensing and actuation with wireless feedback loops for personalized therapy.
Summary
Integrating soft robotics with bioelectronics unlocks new possibilities for medical and wearable devices that are adaptive, comfortable, and intelligent. By carefully addressing challenges such as mechanical mismatch and power management, developers can create next-generation devices that closely mimic biological function and improve patient outcomes.
10.3 Advances in Autonomous Soft Medical Devices
Autonomous soft medical devices represent a cutting-edge frontier in the intersection of soft robotics and medical technology. These devices are designed to perform complex tasks with minimal human intervention, leveraging advances in sensing, actuation, control algorithms, and materials science. The autonomy in soft medical devices enhances precision, adaptability, and patient comfort, opening new possibilities in diagnostics, therapy, and rehabilitation.
Key Components of Autonomous Soft Medical Devices
Advances Driving Autonomy
-
Flexible and Embedded Sensors
- Development of ultra-thin, stretchable sensors enables continuous monitoring of physiological parameters such as pressure, strain, temperature, and biochemical markers.
- Example: A soft robotic catheter embedded with flexible pressure sensors can autonomously navigate blood vessels by detecting vessel walls and adjusting its path.
-
Smart Actuation Mechanisms
- Integration of self-sensing actuators that provide feedback on their own state, reducing the need for external sensors.
- Example: Electroactive polymer actuators that change shape in response to electrical stimuli and provide real-time feedback for precise drug delivery.
-
Artificial Intelligence and Machine Learning
- AI algorithms enable pattern recognition from sensor data, predictive modeling, and adaptive control strategies.
- Example: A soft robotic exosuit that learns a patient’s gait pattern and autonomously adjusts assistance levels during rehabilitation.
-
Energy Autonomy
- Advances in wireless power transfer and energy harvesting (e.g., from body heat or motion) reduce reliance on bulky batteries.
- Example: A wearable soft sensor patch powered by body heat that continuously monitors hydration levels.
-
Communication and Data Security
- Secure wireless communication protocols ensure safe transmission of sensitive medical data.
- Example: Soft wearable devices transmitting encrypted patient data to healthcare providers in real-time.
Mind Map: Autonomous Soft Medical Device Workflow
Example 1: Autonomous Soft Robotic Endoscope
- Description: A soft robotic endoscope capable of navigating complex gastrointestinal pathways autonomously.
- Features: Embedded flexible sensors detect tissue stiffness and obstacles; AI algorithms interpret sensor data to steer the device safely.
- Benefit: Minimizes patient discomfort and reduces the need for manual operation by clinicians.
Example 2: Self-Regulating Soft Insulin Delivery Patch
- Description: A wearable patch that autonomously monitors glucose levels and administers insulin accordingly.
- Features: Biochemical sensors detect glucose; soft actuators control microneedle insertion and insulin release; closed-loop AI control ensures precise dosing.
- Benefit: Enhances diabetes management with minimal patient intervention.
Example 3: Autonomous Soft Exosuit for Stroke Rehabilitation
- Description: A wearable soft exosuit that assists limb movement during rehabilitation exercises.
- Features: Real-time sensing of muscle activity; machine learning algorithms adapt assistance based on patient progress; wireless communication with therapists.
- Benefit: Personalized therapy that evolves with patient recovery, improving outcomes.
Best Practices for Developing Autonomous Soft Medical Devices
- Interdisciplinary Collaboration: Combine expertise in materials science, robotics, AI, and clinical medicine.
- Robust Sensor Fusion: Integrate multiple sensor types to improve reliability and accuracy.
- Adaptive Control Algorithms: Implement machine learning models that can update based on new data.
- Patient-Centric Design: Prioritize comfort, safety, and ease of use.
- Regulatory Compliance: Early engagement with regulatory bodies to ensure device safety and efficacy.
The future of autonomous soft medical devices is promising, with ongoing research pushing the boundaries of what these systems can achieve. By combining soft materials with intelligent control and sensing, these devices are poised to transform personalized medicine and patient care.
10.4 Challenges and Opportunities in Commercialization
Commercializing soft robotics for medical and wearable devices presents a unique set of challenges and opportunities. Understanding these factors is crucial for mechanical engineers, biomedical engineers, and device developers aiming to bring innovative soft robotic solutions from the lab to the market.
Key Challenges in Commercialization
- Material Limitations
- Durability and longevity of soft materials under repetitive stress
- Biocompatibility and regulatory compliance
- Manufacturing Complexity
- Scaling up from prototypes to mass production
- Maintaining quality and consistency in soft material fabrication
- Control and Integration
- Developing reliable control systems for soft actuators
- Integrating sensors seamlessly without compromising flexibility
- Regulatory Hurdles
- Navigating FDA and international medical device regulations
- Demonstrating safety and efficacy through clinical trials
- Market Adoption
- Convincing clinicians and patients to adopt new technologies
- Cost constraints and reimbursement policies
Opportunities in Commercialization
- Growing Demand for Personalized Medicine
- Soft robotics can provide adaptable, patient-specific solutions
- Advances in Materials Science
- Emerging smart materials improve performance and durability
- Integration with Digital Health
- Combining soft robotics with IoT and AI for enhanced monitoring and control
- Cross-Disciplinary Collaborations
- Partnerships between engineers, clinicians, and manufacturers accelerate innovation
- Expanding Wearable Market
- Increasing consumer interest in health and wellness wearables
Mind Map: Challenges in Commercialization
Mind Map: Opportunities in Commercialization
Examples Illustrating Challenges and Opportunities
Example 1: Soft Robotic Glove for Stroke Rehabilitation
- Challenge: Scaling from lab prototype to commercial product required overcoming material fatigue issues and developing a robust pneumatic control system.
- Opportunity: Integration with a mobile app enabled personalized therapy sessions, increasing patient engagement and adherence.
Example 2: Wearable Soft Exosuit for Assisted Mobility
- Challenge: Regulatory approval was complex due to the hybrid nature of the device combining rigid and soft components.
- Opportunity: Collaboration with clinicians and insurers helped define clinical protocols and reimbursement pathways, facilitating market entry.
Example 3: Soft Sensor-Embedded Sleeve for Vital Sign Monitoring
- Challenge: Embedding flexible sensors without compromising comfort and durability was a major hurdle.
- Opportunity: Advances in printable electronics and flexible substrates enabled seamless integration, opening new markets in remote patient monitoring.
Best Practices for Navigating Commercialization
- Engage regulatory experts early to understand requirements.
- Invest in scalable manufacturing processes from the outset.
- Collaborate closely with end-users to ensure device usability and acceptance.
- Leverage emerging technologies like AI and IoT to add value.
- Plan for iterative testing and validation to build clinical evidence.
By strategically addressing these challenges and leveraging the abundant opportunities, developers can successfully commercialize soft robotics devices that transform medical care and wearable technology.
10.5 Visionary Example: Soft Robotics for Personalized Medicine
Personalized medicine aims to tailor medical treatment to the individual characteristics of each patient. Soft robotics, with its inherent adaptability, compliance, and biocompatibility, offers transformative potential to realize this vision. This section explores how soft robotics can be integrated into personalized medicine, highlighting key concepts, design considerations, and illustrative examples.
Mind Map: Soft Robotics in Personalized Medicine
Key Concepts and Best Practices
-
Patient-Specific Device Customization
- Use 3D scanning or MRI data to create anatomically accurate soft robotic devices.
- Select materials with mechanical properties tuned to the patient’s tissue compliance.
- Example: A soft robotic sleeve for limb rehabilitation designed to perfectly conform to a patient’s arm geometry, improving comfort and efficacy.
-
Responsive Therapeutic Delivery
- Incorporate soft actuators capable of modulating pressure or drug release based on real-time sensor feedback.
- Example: A soft robotic patch that delivers localized drug doses in response to detected inflammation markers.
-
Integration with Patient Data
- Embed flexible biosensors to continuously monitor vital signs and biomechanical parameters.
- Use AI algorithms to analyze sensor data and adapt device behavior dynamically.
- Example: A wearable soft robotic glove that adjusts assistance level based on muscle activity and fatigue detected via EMG sensors.
-
Rehabilitation & Assistive Devices
- Design soft exosuits that adapt to individual gait patterns and strength levels.
- Employ neuromuscular electrical stimulation integrated with soft robotics to enhance motor recovery.
- Example: A soft robotic ankle-foot orthosis personalized for stroke patients to improve walking stability.
-
Minimally Invasive Soft Surgical Tools
- Develop soft manipulators that can navigate complex patient-specific anatomy.
- Use soft materials to minimize tissue trauma and improve surgical outcomes.
- Example: A soft robotic catheter customized to the vascular geometry of a patient for safer cardiac interventions.
Detailed Example: Personalized Soft Robotic Exosuit for Stroke Rehabilitation
-
Design Process:
- Capture patient limb geometry via 3D scanning.
- Select silicone elastomers with tailored stiffness matching patient muscle tone.
- Integrate flexible pressure sensors and EMG electrodes.
-
Functionality:
- Actuators provide assistive force dynamically adjusted based on muscle activation.
- Real-time feedback loop optimizes assistance during therapy sessions.
-
Outcome:
- Improved patient comfort and engagement.
- Enhanced motor recovery through adaptive support.
Mind Map: Design Workflow for Personalized Soft Robotics
Summary
Soft robotics presents a powerful platform for advancing personalized medicine by enabling devices that are adaptable, patient-specific, and capable of real-time interaction with the human body. By combining advanced materials, sensor integration, and intelligent control, soft robotic devices can deliver tailored therapies, improve rehabilitation outcomes, and reduce invasiveness in surgical procedures. The future of personalized healthcare will increasingly rely on these soft robotic innovations to meet the unique needs of every patient.
11. Best Practices Summary and Design Guidelines
11.1 Holistic Design Approach for Soft Medical Devices
Designing soft medical devices requires a comprehensive, holistic approach that integrates multiple disciplines, user needs, and environmental considerations. This approach ensures that the final product is not only functional but also safe, comfortable, and effective in real-world medical and wearable applications.
Key Elements of a Holistic Design Approach
User-Centered Design
Understanding the end-user is paramount. This involves:
- Needs Assessment: Engage with clinicians, patients, and caregivers to identify functional requirements.
- Ergonomics: Design devices that conform comfortably to the human body, considering movement and range of motion.
- Comfort & Fit: Use soft, breathable materials and adjustable components to enhance wearability.
Example:
A soft robotic glove designed for stroke rehabilitation incorporates adjustable straps and soft silicone pads to accommodate different hand sizes and reduce skin irritation during prolonged use.
Material Selection
Choosing the right materials impacts device performance and patient safety.
- Biocompatibility: Materials must be non-toxic and hypoallergenic.
- Durability: Resistance to wear, sweat, and repeated deformation.
- Flexibility: Maintain softness without sacrificing structural integrity.
Example:
Using medical-grade silicone elastomers with embedded conductive threads enables a soft wearable sensor that monitors muscle activity without causing discomfort or allergic reactions.
Actuation & Control
Soft actuators must be responsive and controllable.
- Soft Actuators: Pneumatic, hydraulic, or shape-memory materials tailored to application.
- Feedback Systems: Embedded sensors provide real-time data.
- Control Algorithms: Adaptive controls that respond to user movement and physiological signals.
Example:
A pneumatic soft exosuit uses pressure sensors and closed-loop control to assist gait in patients with mobility impairments, adjusting assistance based on real-time feedback.
Fabrication Techniques
Fabrication methods influence design complexity and scalability.
- Molding & Casting: Ideal for simple geometries and rapid prototyping.
- 3D Printing: Enables complex, multi-material structures.
- Multi-material Integration: Combining rigid and soft parts for enhanced functionality.
Example:
A soft robotic sleeve fabricated via multi-material 3D printing integrates flexible silicone with rigid TPU segments to provide both comfort and structural support.
Safety & Compliance
Medical devices must adhere to strict safety standards.
- Risk Assessment: Identify potential failure modes.
- Regulatory Standards: FDA, ISO compliance.
- Reliability Testing: Long-term durability and performance under physiological conditions.
Example:
Before clinical deployment, a soft robotic prosthetic undergoes accelerated fatigue testing and biocompatibility assays to ensure patient safety and regulatory approval.
Interdisciplinary Collaboration
Successful design requires collaboration across fields.
- Mechanical and biomedical engineers work on device mechanics and physiology.
- Clinicians provide insights on patient needs and usability.
- Software developers create control and data analysis tools.
Example:
Development of a soft robotic hand prosthesis involved engineers, occupational therapists, and software developers to ensure the device met functional and user experience goals.
Testing & Iteration
Iterative prototyping and testing refine the device.
- Prototyping: Rapid fabrication to test concepts.
- User Trials: Feedback from real users to improve design.
- Performance Metrics: Quantitative measures of device efficacy.
Example:
A soft wearable sensor array underwent multiple design iterations based on patient feedback to optimize sensor placement and improve signal quality.
Summary Mind Map
By embracing this holistic design approach, mechanical and biomedical engineers, as well as device developers, can create soft medical and wearable devices that are not only innovative but also practical, safe, and user-friendly.
11.2 Balancing Flexibility, Strength, and Functionality
In soft robotics design for medical and wearable devices, achieving an optimal balance between flexibility, strength, and functionality is critical. These three attributes often have competing requirements, and the design process must carefully consider trade-offs to ensure device effectiveness, safety, and user comfort.
Understanding the Core Attributes
- Flexibility: Enables the device to conform to complex anatomical shapes, accommodate movement, and provide comfort.
- Strength: Ensures durability, load-bearing capacity, and resistance to wear and tear.
- Functionality: Refers to the device’s ability to perform its intended tasks reliably, including actuation, sensing, and control.
Mind Map: Balancing Flexibility, Strength, and Functionality
Best Practices and Examples
Material Selection for Balanced Properties
Example: In a soft robotic glove designed for hand rehabilitation, silicone elastomers are chosen for their flexibility and skin compatibility. To enhance strength without compromising flexibility, embedded nylon fibers are integrated along the finger segments. This reinforcement allows the glove to withstand repeated flexion and extension cycles while maintaining a soft feel.
- Practice: Use composite materials or fiber reinforcements to enhance strength in targeted areas while preserving overall flexibility.
Structural Design Approaches
Example: A soft exosuit designed to assist lower limb movement employs a corrugated actuator design. The corrugations provide flexibility along bending axes while the thicker base layers maintain structural integrity.
- Practice: Employ geometric design features such as corrugations, folds, or layered structures to localize flexibility and strength where needed.
Functional Integration without Compromise
Example: For a wearable respiratory monitor, flexible strain sensors are embedded within a soft chest band. The sensors are placed in regions that experience minimal stretch to avoid damage, while the band itself remains highly flexible to conform to the body.
- Practice: Strategically place functional components (sensors, actuators) in areas optimized for their durability and performance, minimizing impact on flexibility.
Mind Map: Trade-offs and Optimization Strategies
Practical Example: Designing a Soft Robotic Sleeve
-
Goal: Assist arm movement in stroke patients with a device that is comfortable, durable, and effective.
-
Step 1: Material Choice
- Use a soft silicone base for skin comfort and flexibility.
- Integrate Kevlar fibers in high-stress regions to prevent tearing.
-
Step 2: Structural Design
- Design segmented pneumatic chambers that allow bending while maintaining pressure integrity.
-
Step 3: Functional Integration
- Embed flexible pressure sensors between chambers to monitor actuation.
- Position sensors to avoid excessive stretch.
-
Step 4: Testing and Iteration
- Use FEA to simulate stress and deformation.
- Prototype and gather user feedback to adjust stiffness and sensor placement.
Summary
Balancing flexibility, strength, and functionality in soft robotics for medical and wearable devices requires a multidisciplinary approach combining material science, structural engineering, and user-centered design. By leveraging composite materials, smart structural designs, and strategic functional integration, designers can create devices that meet demanding performance requirements while ensuring patient comfort and safety.
11.3 Iterative Testing and User-Centered Design
Iterative testing and user-centered design (UCD) are foundational practices in developing effective soft robotics for medical and wearable devices. These approaches ensure that the final product not only meets technical specifications but also aligns with user needs, comfort, and real-world usability.
What is Iterative Testing?
Iterative testing is a cyclical process of designing, prototyping, testing, analyzing, and refining a device. This continuous feedback loop helps identify design flaws early and adapt solutions based on real user interactions.
What is User-Centered Design?
User-centered design places the end-user at the core of the development process. It involves understanding user needs, preferences, and limitations through direct engagement and integrating this feedback into the design.
Mind Map: Iterative Testing and User-Centered Design Process
Best Practices in Iterative Testing and UCD
Start with Low-Fidelity Prototypes
Use simple, inexpensive models (e.g., foam, paper, silicone molds) to quickly test concepts and gather early user feedback.
Example: A soft robotic glove prototype made from inexpensive silicone sheets to test finger movement range before investing in complex actuators.
Engage Real Users Early and Often
Involve patients, clinicians, or target users in testing sessions to gather authentic feedback on comfort, usability, and functionality.
Example: Conducting usability sessions with stroke survivors to evaluate a soft exosuit’s ease of donning and doffing.
Use Multimodal Feedback Collection
Combine interviews, observation, and sensor data to get a holistic understanding of device performance and user experience.
Example: Using pressure sensors embedded in a wearable sleeve alongside user interviews to assess fit and comfort.
Prioritize Safety and Comfort
Iterative testing should always evaluate potential safety risks and user comfort, especially for medical devices worn for extended periods.
Example: Testing a soft robotic knee brace for skin irritation and pressure points during prolonged use.
Document and Analyze Every Iteration
Keep detailed records of design changes, test results, and user feedback to inform decision-making and regulatory documentation.
Example: Maintaining a design log for each prototype version of a soft robotic hand, noting improvements in grip strength and user satisfaction.
Mind Map: User Feedback Types and Integration
Example: Iterative Testing of a Soft Robotic Glove for Rehabilitation
Step 1: Initial Prototype
- Created a simple silicone glove with embedded pneumatic actuators.
- Tested basic finger flexion and extension.
Step 2: User Testing
- Conducted sessions with 5 stroke patients.
- Collected feedback on comfort, ease of use, and assistance level.
Step 3: Analysis
- Users reported discomfort around the wrist and difficulty putting on the glove.
- Actuation force was insufficient for some users.
Step 4: Refinement
- Redesigned wrist area with softer, stretchable material.
- Increased actuator size and optimized air pressure control.
Step 5: High-Fidelity Prototype
- Integrated flexible sensors for real-time feedback.
- Improved donning mechanism with adjustable straps.
Step 6: Final Testing
- Positive user feedback on comfort and improved assistance.
- Measured increased range of motion and grip strength.
Summary
Iterative testing combined with user-centered design ensures that soft robotic medical and wearable devices are not only functional but also comfortable, safe, and tailored to the users’ real needs. By continuously prototyping, testing, and refining with direct user involvement, developers can significantly enhance device efficacy and adoption.
11.4 Collaboration Across Disciplines: Engineering and Medicine
Successful development of soft robotics for medical and wearable devices hinges on seamless collaboration between mechanical engineers, biomedical engineers, clinicians, and other healthcare professionals. This interdisciplinary synergy ensures that devices are not only technically sound but also clinically relevant, safe, and user-friendly.
Why Collaboration Matters
- Bridging Knowledge Gaps: Engineers bring expertise in materials, design, and control systems, while medical professionals provide insights on anatomy, physiology, and patient needs.
- User-Centered Design: Clinicians help define real-world use cases, ensuring devices address actual medical challenges.
- Regulatory and Ethical Guidance: Medical experts guide compliance with healthcare regulations and ethical standards.
Key Stakeholders in Collaboration
Collaboration Workflow
- Problem Identification
- Medical team identifies unmet clinical needs.
- Conceptual Design
- Engineers propose initial soft robotic concepts.
- Feasibility Assessment
- Joint evaluation of technical and clinical viability.
- Prototyping and Testing
- Iterative development with clinical feedback.
- Clinical Trials and Validation
- Rigorous testing under medical supervision.
- Regulatory Approval and Deployment
- Coordinated effort to meet compliance and market needs.
Best Practices for Effective Collaboration
- Early and Continuous Communication: Regular meetings and shared documentation platforms.
- Cross-Training: Engineers learn basic medical terminology; clinicians gain insight into engineering constraints.
- Co-Design Workshops: Joint sessions to brainstorm and prototype.
- Pilot Studies with End-Users: Engage patients early to gather usability feedback.
- Clear Role Definition: Avoid overlap and ensure accountability.
Example 1: Development of a Soft Robotic Glove for Stroke Rehabilitation
- Collaboration Highlights:
- Therapists outlined hand movement challenges post-stroke.
- Engineers designed soft pneumatic actuators mimicking finger flexion.
- Iterative prototyping incorporated therapist feedback on comfort and range of motion.
- Clinical trials conducted with patient volunteers guided by medical staff.
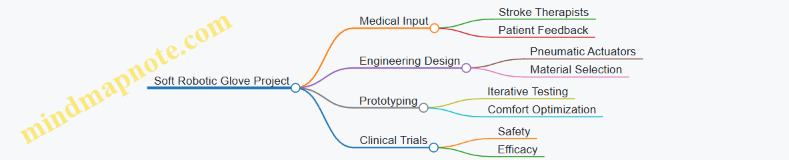
Example 2: Wearable Soft Sensor Array for Physiological Monitoring
- Collaboration Highlights:
- Biomedical engineers developed flexible sensors.
- Physicians defined vital signs critical for monitoring.
- Software developers created algorithms for real-time data interpretation.
- Nurses provided insights on device wearability during daily activities.
Tools and Platforms to Facilitate Collaboration
- Project Management: Jira, Trello for task tracking.
- Communication: Slack, Microsoft Teams for instant messaging.
- Documentation: Confluence, Google Docs for shared knowledge.
- Design Collaboration: CAD sharing platforms, virtual whiteboards.
- Clinical Data Sharing: HIPAA-compliant cloud services.
Summary
Interdisciplinary collaboration is the backbone of successful soft robotics design in medical and wearable devices. By integrating diverse expertise early and throughout the development lifecycle, teams can create innovative, effective, and patient-centered solutions that truly transform healthcare.
11.5 Checklist: Key Considerations for Soft Robotics Developers
Developing soft robotics for medical and wearable devices requires a comprehensive approach that balances innovation, safety, and usability. This checklist consolidates critical considerations to guide developers through the design, prototyping, and deployment phases.
Mind Map: Key Areas in Soft Robotics Development
Checklist Items with Examples:
-
Material Selection
- Ensure materials are biocompatible and hypoallergenic.
- Example: Use medical-grade silicone for a soft robotic glove to prevent skin irritation during prolonged use.
- Evaluate mechanical properties such as tensile strength and elongation.
- Example: Selecting a silicone elastomer with high tear resistance for a soft exosuit that endures repetitive motion.
- Consider environmental resistance (e.g., sweat, moisture).
- Example: Incorporate hydrophobic coatings for wearable sensors exposed to sweat.
- Ensure materials are biocompatible and hypoallergenic.
-
Design & Modeling
- Use finite element analysis (FEA) to predict deformation and stress.
- Example: Simulate a pneumatic actuator’s inflation to optimize chamber geometry for uniform bending.
- Integrate flexible sensors early in the design phase.
- Example: Embed stretchable strain sensors in a soft sleeve to monitor joint movement.
- Prioritize modularity for ease of maintenance and upgrades.
- Use finite element analysis (FEA) to predict deformation and stress.
-
Fabrication Techniques
- Choose fabrication methods compatible with selected materials.
- Example: Use multi-material 3D printing to combine soft and rigid components in a wearable device.
- Implement rapid prototyping cycles to iterate designs quickly.
- Example: Create successive molds for a soft robotic hand to refine finger articulation.
- Choose fabrication methods compatible with selected materials.
-
Control Systems
- Develop closed-loop control to improve responsiveness.
- Example: Use embedded pressure sensors to regulate pneumatic actuator inflation in real time.
- Incorporate machine learning for adaptive control.
- Example: Train an algorithm to adjust assistance levels in a soft exoskeleton based on user gait patterns.
- Design user-friendly interfaces for clinicians and patients.
- Develop closed-loop control to improve responsiveness.
-
Safety & Compliance
- Conduct thorough risk assessments focusing on mechanical failure and user safety.
- Example: Analyze pinch points in a soft robotic glove to prevent injury.
- Align with regulatory standards (e.g., FDA, ISO 13485).
- Example: Document material certifications and testing protocols for submission.
- Address ethical considerations, including data privacy and user consent.
- Conduct thorough risk assessments focusing on mechanical failure and user safety.
-
Testing & Validation
- Perform mechanical durability tests under simulated use conditions.
- Example: Cycle test a soft actuator through thousands of inflation-deflation cycles.
- Validate biocompatibility through in vitro and in vivo studies.
- Conduct user trials to gather feedback on comfort and functionality.
- Perform mechanical durability tests under simulated use conditions.
-
Application Specifics
- Tailor design to the target user group (e.g., pediatric vs. geriatric).
- Example: Design a lightweight, adjustable soft exosuit for elderly patients with limited strength.
- Consider integration with existing medical workflows.
- Example: Ensure a wearable health monitor can sync data with hospital electronic health records.
- Tailor design to the target user group (e.g., pediatric vs. geriatric).
Mind Map: Iterative Development Cycle
Final Tips:
- Maintain cross-disciplinary collaboration between mechanical engineers, biomedical engineers, clinicians, and end-users.
- Document every stage meticulously to support regulatory submissions and future iterations.
- Prioritize user comfort and ergonomics alongside technical performance.
This checklist serves as a practical guide to ensure that soft robotics developers create safe, effective, and user-centered medical and wearable devices.