Astrodynamics and Orbital Mechanics for Space Systems
1. Foundations of Orbital Mechanics and Coordinate Frames
1.1 Spacecraft Motion Inertial and Earth Fixed Reference Frames
A spacecraft’s equations of motion depend on what you call “zero rotation.” That choice is not cosmetic: it changes which apparent forces appear, how you interpret sensor measurements, and how you compare trajectories to Earth.
Core Idea
An inertial frame is one where Newton’s first law holds without adding fictitious forces due to frame rotation. An Earth fixed frame rotates with the Earth, so it is convenient for mapping positions to latitude and longitude, but it introduces apparent effects when you write dynamics in that rotating frame.
Inertial Frames
In practice, “inertial” means “close enough for the time span and accuracy you need.” A common approach is to use a frame whose axes are fixed relative to distant stars. In such a frame, the dominant gravity model is expressed cleanly, and orbital motion is described with fewer bookkeeping terms.
What Changes in Inertial Coordinates
- Position r and velocity v are measured directly in the inertial axes.
- Acceleration a comes from physical forces only, such as gravity and thrust.
- Angular momentum and energy behave more predictably in idealized two-body motion.
Practical Best Practice
When you propagate an orbit, keep the dynamics in the inertial frame, then transform to Earth fixed only when you need ground tracks or visibility.
Earth Fixed Frames
An Earth fixed frame rotates with the Earth. Its axes are tied to Earth’s rotation and orientation, so a spacecraft state can be mapped to a point on the rotating planet.
Why Earth Fixed Is Useful
- Ground station pointing uses Earth fixed coordinates.
- Coverage and line-of-sight checks are naturally expressed relative to Earth.
- Orbit determination often compares predicted measurements to Earth-based observations.
What Changes in Earth Fixed Coordinates
When you write derivatives in a rotating frame, the time derivative of a vector includes extra terms. If ω is the Earth rotation rate vector, then for any vector s:
- The inertial derivative relates to the rotating derivative by adding ω × s.
- The second derivative introduces terms that look like Coriolis and centrifugal effects.
A simple way to remember it: if you insist on using a rotating frame for dynamics, you must pay the “rotation tax” in the equations.
Transformations Between Frames
The transformation is usually a rotation about Earth’s spin axis plus small corrections for Earth orientation. The key quantity is the rotation angle between the inertial axes and Earth fixed axes at the measurement or propagation time.
Systematic Workflow
- Start with spacecraft state in inertial coordinates.
- Compute Earth orientation rotation at the relevant time.
- Rotate position into Earth fixed coordinates for mapping.
- If you need velocities, rotate velocity and include the rotation-rate contribution consistently.
Example: Converting a Position for Ground Track
Suppose a spacecraft has inertial position \(r_I\) at a given epoch. Compute the rotation matrix R that maps inertial axes to Earth fixed axes. Then:
- \(r_E = R · r_I\)
For a ground track, you typically only need position. For pointing and Doppler, you also need velocity, and the rotation-rate term matters.
Mind Map
Mind Map: Reference Frames for Spacecraft Motion
Example: Velocity Transformation and the Rotation Tax
Let R map inertial to Earth fixed at time t. If \(v_I\) is inertial velocity, then Earth fixed velocity is not just \(R · v_I\). The rotating frame’s velocity includes the effect of frame rotation:
- \(v_E = R · v_I − ω × r_E\)
If you omit the \(ω × r_E\) term, your predicted ground-relative motion will be systematically off, which shows up quickly in Doppler and tracking residuals.
Common Pitfalls
- Mixing time tags: using a rotation angle from a different epoch than the state.
- Inconsistent ω direction: sign errors flip the apparent Coriolis effect.
- Transforming accelerations incorrectly: second derivatives require careful handling of rotation terms.
Summary
Use inertial frames for motion modeling and Earth fixed frames for Earth-centric interpretation. Transform states with a rotation matrix at the correct epoch, and treat velocities with the rotation-rate term so your dynamics and measurements agree.
1.2 Time Scales and Their Role in Orbit Determination
Orbit determination is mostly about geometry and dynamics, but time is the hidden third wheel. If your time tags are inconsistent, even a perfect force model will produce biased states. This section builds a practical mental model: what time scales exist, how they differ, and how to convert them correctly when turning measurements into orbit updates.
Mind Map: Time Scales and Their Uses
The Core Idea: Time Tags Must Match the Model
A measurement arrives with a timestamp, but the orbit model expects a specific time scale. For example, a state transition matrix for propagation is computed using dynamical time (commonly TT or TDB depending on the formulation). If you feed UTC directly into the integrator, you effectively introduce step-size and phase errors that look like incorrect initial conditions.
A useful rule: time scale choice is part of the mathematical model, not just bookkeeping. When you change time scales, you are changing the independent variable of the equations.
UTC, TAI, and TT: The Practical Chain
Ground systems often produce UTC because it matches clocks people use. UTC is tied to atomic time but adjusted with leap seconds to stay close to Earth rotation. That means UTC is not uniform: the length of a day is not perfectly constant in the UTC sense.
TAI is continuous atomic time with no leap seconds. TT is a theoretical time used for dynamics; it is offset from TAI by a fixed amount (TT = TAI + 32.184 s). In orbit determination workflows, a common approach is:
- Convert observation timestamps from UTC to TAI using the leap-second table.
- Convert TAI to TT using the fixed offset.
- Use TT consistently in the propagation and in the light-time iteration for range and Doppler.
Example: Suppose a ground station logs a Doppler measurement at a UTC time that falls after a leap second insertion. If you ignore the leap second, your converted TAI will be off by 1 s. For a low Earth orbit, a 1 s timing error can translate into a noticeable along-track position error because the spacecraft moves kilometers per second-scale interval.
UT1 and Earth Rotation: Time for Orientation, Not Dynamics
Earth-fixed coordinates (ECEF) rotate relative to inertial frames. The rotation angle is tied to Earth orientation, which depends on Earth rotation irregularities. UT1 is a time scale linked to Earth rotation and is used to compute Earth rotation angle and related transformations.
Here’s the key separation:
- TT/TDB drive the spacecraft dynamics and ephemeris timing.
- UT1 drives Earth orientation transformations between inertial and Earth-fixed frames.
Mixing them is a classic failure mode. If you use UT1 where TT is required, you distort the inertial propagation timeline. If you use TT where UT1 is required, you mis-rotate the Earth-fixed frame and corrupt the measurement geometry.
Relativistic Corrections: Small, but Not Random
When you model signals and ephemerides, you often need barycentric timing (TDB) rather than purely terrestrial timing (TT). The TT→TDB difference is small and periodic, but it matters because it affects light-time and the mapping between emission and reception events.
Example: In a two-way ranging system, the signal path depends on the emission time and the spacecraft position at that time. If your light-time iteration uses the wrong time scale, the iteration may still converge, but it converges to the wrong physical solution.
A Concrete Conversion Workflow
Below is a compact checklist you can implement in software. The goal is to keep a canonical internal time scale and preserve the original input scale.
Input: observation time t_obs in UTC
1) Determine leap-second offset ΔLS for t_obs
2) Compute t_TAI = t_UTC + ΔLS
3) Compute t_TT = t_TAI + 32.184 s
4) For inertial propagation use t_TT (or convert to TDB if required)
5) For Earth orientation use UT1 derived from Earth orientation parameters
6) Store both: internal time and original time scale metadata
Sanity Checks That Catch Time Bugs Early
- Monotonicity: Converted times should be strictly increasing for a normal observation sequence.
- Known offsets: The TT−TAI difference should always be 32.184 s.
- Magnitude checks: Light-time should be on the order of milliseconds for Earth-orbit links and tens of milliseconds for lunar-scale links.
- Frame consistency: If you compute an inertial-to-ECEF transform, confirm the rotation uses UT1-derived quantities while the spacecraft state uses TT-derived propagation.
Time scales are not just labels. They determine which physical clock your model assumes, and that assumption directly shapes the orbit solution.
1.3 Vector Geometry for Position Velocity and Acceleration
Vector geometry is the language of orbital motion: position tells you where the spacecraft is, velocity tells you how fast and in what direction it moves, and acceleration tells you how the velocity changes. The key idea is that all three are vectors, so you can use consistent operations—addition, subtraction, dot products, cross products, and norms—to reason about motion without getting lost in coordinates.
Core Vector Quantities
A spacecraft state at time \(t\) is commonly written as a position vector \(\mathbf{r}(t)\) and a velocity vector \(\mathbf{v}(t)\). Acceleration \(\mathbf{a}(t)\) is the time derivative of velocity.
- \(\mathbf{r}(t)\): from an origin to the spacecraft, units of length.
- \(\mathbf{v}(t)=\dot{\mathbf{r}}(t)\): rate of change of position, units of length per time.
- \(\mathbf{a}(t)=\dot{\mathbf{v}}(t)=\ddot{\mathbf{r}}(t)\): rate of change of velocity, units of length per time squared.
A practical habit: whenever you see a formula, check units and direction. For example, \(\mathbf{v}\) must have the same direction as the instantaneous motion, while \(\mathbf{a}\) points in the direction of velocity change.
Mind Map: Vector Relationships
Decomposing Motion into Radial and Transverse Parts
In orbital mechanics, it is often useful to separate motion into directions relative to the position vector. Define the unit radial vector \(\hat{\mathbf{r}}=\mathbf{r}/|\mathbf{r}|\). Then the radial component of velocity is
\[ v_r = \mathbf{v}\cdot \hat{\mathbf{r}}. \]
The transverse part is what remains:
\[ \mathbf{v}_t = \mathbf{v} - v_r\hat{\mathbf{r}}. \]
This decomposition is not just algebra; it matches geometry. If \(\mathbf{v}\) is aligned with \(\mathbf{r}\), then \(\mathbf{v}_t=\mathbf{0}\) and the motion is purely radial. If \(\mathbf{v}\) is perpendicular to \(\mathbf{r}\), then \(v_r=0\) and the motion is purely transverse.
For acceleration, a similar decomposition helps interpret forces. A common result in polar-like geometry is that acceleration contains a radial term and a transverse term associated with changing direction. Even if you do not memorize the full derivation yet, you should recognize the pattern: changing speed affects the radial component, while changing direction affects the transverse component.
Dot Product and Projections
The dot product \(\mathbf{a}\cdot\mathbf{b}=|\mathbf{a}||\mathbf{b}|\cos\theta\) gives a projection. Use it to answer questions like: “How much of velocity points along the radius?”
Example: Let \(\mathbf{r}=(7000,0,0)\) km and \(\mathbf{v}=(0,7.5,1.0)\) km/s in a consistent frame. Then \(\hat{\mathbf{r}}=(1,0,0)\). The radial velocity is
\[ v_r=\mathbf{v}\cdot\hat{\mathbf{r}}=(0,7.5,1.0)\cdot(1,0,0)=0\ \text{km/s}. \]
So the motion is initially perpendicular to the radius, meaning it is purely transverse at that instant.
Cross Product and Angular Momentum
The cross product \(\mathbf{h}=\mathbf{r}\times\mathbf{v}\) produces a vector perpendicular to the plane defined by \(\mathbf{r}\) and \(\mathbf{v}\). Its magnitude is
\[ |\mathbf{h}|=|\mathbf{r}||\mathbf{v}|\sin\theta. \]
Geometrically, \(\mathbf{h}\) is proportional to the “turning tendency” of the orbit: it measures how strongly the motion sweeps out area.
Example: With \(\mathbf{r}=(7000,0,0)\) km and \(\mathbf{v}=(0,7.5,1.0)\) km/s,
\[ \mathbf{h}=\begin{vmatrix} \mathbf{i}&\mathbf{j}&\mathbf{k}\ 7000&0&0\ 0&7.5&1.0 \end{vmatrix} =(0,-7000\cdot 1.0,7000\cdot 7.5)\ \text{km}^2/\text{s}. \]
So \(\mathbf{h}\) points in a fixed direction for a two-body orbit, indicating the orbital plane.
From Finite Differences to Derivatives
In practice, you often estimate derivatives from discrete data. If you have \(\mathbf{r}_k\) at times \(t_k\), a simple approximation is
\[ \mathbf{v}_k \approx \frac{\mathbf{r}_{k+1}-\mathbf{r}_{k-1}}{t_{k+1}-t_{k-1}}. \]
Then acceleration can be approximated similarly from velocities. The important vector-geometry point is that subtraction happens component-wise in any Cartesian frame, but the meaning depends on using consistent units and consistent time spacing.
Mind Map: Common Computations
Summary Checks That Prevent Silent Errors
Before moving on, apply three quick sanity checks: (1) verify units for every term, (2) confirm perpendicularity when you expect it, such as \(\mathbf{v}_t\cdot\hat{\mathbf{r}}=0\) by construction, and (3) confirm that \(\mathbf{h}\) is perpendicular to both \(\mathbf{r}\) and \(\mathbf{v}\) by checking dot products \(\mathbf{h}\cdot\mathbf{r}=0\) and \(\mathbf{h}\cdot\mathbf{v}=0\) within numerical tolerance.
1.4 Transformations Between Common Astronomical and Geodetic Frames
Space navigation is mostly about turning one description of “where the spacecraft is” into another. A position vector is not inherently tied to a frame; it becomes meaningful only after you specify the coordinate system and the transformations that relate it to other systems. This section focuses on the most common chain used in practice: inertial → Earth-fixed → local topocentric, with careful attention to time, Earth orientation, and units.
Core Frames and What They Mean
Inertial frames approximate a non-rotating reference for the stars. In many workflows, you start with an inertial state (position and velocity) from orbit determination or propagation.
Earth-fixed frames rotate with the Earth, so they are convenient for ground stations, maps, and line-of-sight geometry. The key complication is that Earth’s rotation axis is not perfectly fixed in inertial space.
Topocentric frames are local frames centered at a site on Earth. They are convenient for azimuth/elevation, range-rate, and visibility checks.
A practical rule: if your measurement is from a ground station, you will eventually need a topocentric line-of-sight vector. If your dynamics are gravitational and modeled in an inertial sense, you will eventually need an inertial state. Transformations connect these needs.
Mind Map: Transformation Steps
Time Scales and Earth Rotation Angle
Earth-fixed coordinates depend on Earth’s rotation relative to inertial space. The transformation therefore requires a time tag expressed in a consistent time scale. In many implementations, you compute an Earth rotation angle from a time argument and then build a rotation about the Earth’s spin axis.
A simple best practice: treat time conversion as a separate function that returns a single scalar used by all subsequent rotations. If you mix time scales inside the transformation, debugging becomes painful.
For example, suppose you have an inertial position at 2026-02-01 12:00:00 UTC. You convert that to the time scale required by your Earth rotation model, compute the rotation angle, and then rotate the inertial coordinates into the Earth-fixed frame.
Earth Orientation Parameters and Rotation Order
Earth orientation is typically represented by a sequence of rotations:
- Precession and nutation: slow changes in the Earth’s rotation axis direction in inertial space.
- Earth rotation: rotation about the axis through the Earth-fixed frame.
- Polar motion: small wobble of the rotation axis relative to the crust.
Rotation order matters because rotations do not commute. A robust approach is to build each rotation matrix explicitly and multiply in the documented order from inertial to Earth-fixed.
Best practice example: if you accidentally swap precession/nutation with Earth rotation, your ground track can still look plausible for short arcs, but line-of-sight angles will drift systematically. The error often shows up first in azimuth/elevation residuals.
Inertial to Earth-Fixed Transformation
At a high level, the inertial-to-Earth-fixed mapping is a rotation:
- Compute orientation matrices for precession/nutation and polar motion.
- Compute Earth rotation about the spin axis.
- Multiply to obtain a single rotation matrix \( R_{E\leftarrow I} \).
- Transform position with \(\mathbf{r}*E = R*{E\leftarrow I},\mathbf{r}_I\).
Velocity needs special care: if the Earth-fixed frame rotates, then the transformed velocity includes the frame’s angular velocity term. Many implementations compute velocity using the same rotation plus an additional cross-product term.
Earth-Fixed to Topocentric Transformation
Once you have Earth-fixed coordinates, you can form a local topocentric frame at a station.
Steps:
- Convert station geodetic latitude, longitude, and height to an Earth-fixed position \(\mathbf{r}_{site,E}\).
- Compute the line-of-sight vector in Earth-fixed coordinates: \(\boldsymbol{\rho}*E = \mathbf{r}*{sc,E} - \mathbf{r}_{site,E}\).
- Rotate \(\boldsymbol{\rho}_E\) into the local frame using a matrix built from the station’s latitude and longitude.
- Convert local components to azimuth/elevation (or to unit vectors for measurement models).
Concrete example: if the local frame defines axes as East, North, Up, then the elevation angle comes from the Up component relative to the horizontal magnitude. If you swap North and East in the rotation matrix, azimuth will be mirrored while elevation remains correct—an easy-to-miss bug.
Validation Checks That Catch Real Errors
Use small, cheap checks before trusting results:
- Orthogonality: rotation matrices should satisfy \(R^T R \approx I\). If not, you likely mixed degrees and radians or used a non-normalized axis.
- Distance invariance: rotation should preserve norms. Verify \(|\mathbf{r}_E| \approx |\mathbf{r}_I|\) for pure rotations.
- Geometric sanity: for a station, compute elevation at a known pass time. If elevation is consistently negative when you expect a visible pass, the transformation chain or time tag is wrong.
Example: End-to-End Frame Chain for a Single Observation
Assume you have an inertial spacecraft state at a measurement epoch and a ground station with known geodetic coordinates.
- Convert the epoch to the time scale required by your Earth rotation model.
- Build \( R_{E\leftarrow I} \) from precession/nutation, Earth rotation, and polar motion.
- Compute \(\mathbf{r}*{sc,E} = R*{E\leftarrow I},\mathbf{r}_{sc,I}\).
- Convert station geodetic coordinates to \(\mathbf{r}_{site,E}\) using the Earth ellipsoid.
- Form \(\boldsymbol{\rho}*E = \mathbf{r}*{sc,E} - \mathbf{r}_{site,E}\) and rotate into the local frame.
- Compute azimuth/elevation for the measurement model.
If you keep time handling separate, build rotations explicitly, and validate with orthogonality and geometry, the transformation chain becomes predictable rather than mysterious. That predictability is what makes orbit determination and navigation behave.
1.5 Practical Example Converting Observations Between Frames
You often start with measurements in one frame and need a state estimate in another. A clean workflow prevents subtle mistakes like mixing Earth-fixed coordinates with inertial dynamics, or using the wrong time scale for Earth rotation. This example converts a ground-based observation into an inertial line-of-sight direction and then into a topocentric right ascension and declination.
Step 1: Define the frames and what each measurement lives in
Assume:
- Observation is made from a ground station at geodetic latitude φ, longitude λ, and height h.
- The sensor provides an azimuth A and elevation E (topocentric angles) at a given reception time t_rcv.
- The goal is an inertial direction vector in the Earth-centered inertial (ECI) frame.
Frames used:
- Topocentric horizon frame: axes East, North, Up (ENU).
- Earth-fixed frame: Earth rotates with respect to inertial space (ECEF).
- Inertial frame: ECI for orbital propagation.
Step 2: Convert azimuth and elevation to a unit vector in ENU
In ENU, the line-of-sight unit vector is
- u_E = cos(E) * sin(A)
- u_N = cos(E) * cos(A)
- u_U = sin(E)
Example values:
- A = 120°
- E = 30°
Compute:
- u_E = cos(30°) * sin(120°) = 0.8660 * 0.8660 = 0.7500
- u_N = cos(30°) * cos(120°) = 0.8660 * (-0.5000) = -0.4330
- u_U = sin(30°) = 0.5000
So u_ENU = [0.7500, -0.4330, 0.5000].
Step 3: Rotate ENU into ECEF using station latitude and longitude
A standard local-to-global rotation maps ENU to ECEF. Let φ be geodetic latitude and λ be longitude. The ECEF unit vector is
u_ECEF = R3(λ) * R2(φ) * u_ENU
where R2 and R3 are rotations about the y-like and z-like axes depending on your convention. The key best practice: use one consistent convention across the entire pipeline and test with a sanity check.
Sanity check: if E = 90° (straight up), u_ENU = [0, 0, 1], and u_ECEF should align with the station’s local outward normal. If your result points somewhere else, the rotation order or sign is wrong.
Step 4: Convert ECEF direction to ECI using Earth rotation at the correct time scale
Earth rotation links ECEF to ECI. Use an Earth rotation angle θ computed from the reception time t_rcv in the time scale required by your Earth orientation model. A common pitfall is mixing UTC with UT1 or TT without conversion.
If you use a simplified model:
- u_ECI = R3(θ) * u_ECEF
Example time:
- t_rcv = 2026-02-15 21:30:00 UTC
In practice, you would convert UTC to the time scale used by your θ model, then compute θ. For this example, assume θ is already computed and focus on the transformation.
Step 5: Convert inertial unit vector to right ascension and declination
Given u_ECI = [x, y, z],
- α = atan2(y, x)
- δ = asin(z)
These angles are what many orbit determination pipelines use as observation inputs, or as intermediate quantities for linearization.
Mind Map: Observation to Inertial Direction Workflow
Step 6: Integrated best practices that prevent common errors
- Keep vectors as unit vectors until you truly need range. Direction-only observations should not accidentally inherit station position scaling.
- Validate with extreme angles. Try A = 0°, E = 0° and E = 90° to confirm the rotation chain.
- Treat time conversion as part of the math, not a footnote. If θ uses a different time scale than your measurement timestamp, the inertial direction will drift even when geometry looks correct.
- Log intermediate outputs. Store u_ENU, u_ECEF, u_ECI, and (α, δ). When results disagree with expectations, you can pinpoint the failing transformation quickly.
This example produces an inertial line-of-sight direction from simple sensor angles. Once you have that direction, the next step in orbit determination is to connect it to the spacecraft position through the observation model and measurement Jacobians.
2. Two Body Dynamics and Keplerian Orbits
2.1 Newtonian Gravity and the Two Body Problem
Newton’s law of gravitation says the gravitational force between two point masses is attractive, proportional to the product of their masses, and inversely proportional to the square of their separation. For masses \(m_1\) and \(m_2\) separated by vector \(\mathbf{r}=\mathbf{r}_2-\mathbf{r}_1\), the force on \(m_1\) is
\[\mathbf{F}_{1\leftarrow 2}=G,\frac{m_1 m_2}{|\mathbf{r}|^3},\mathbf{r}.\]
The \(|\mathbf{r}|^3\) in the denominator is not a typo: one factor of \(|\mathbf{r}|\) comes from the unit direction \(\mathbf{r}/|\mathbf{r}|\), and the other two come from the inverse-square magnitude.
Mind Map: Newtonian Gravity and Two Body Problem
From Forces to Accelerations
Divide the force by the mass being accelerated. The acceleration of \(m_1\) due to \(m_2\) is
\[\mathbf{a}_1=\frac{\mathbf{F}_{1\leftarrow 2}}{m_1}=G,\frac{m_2}{|\mathbf{r}|^3},\mathbf{r}.\]
Similarly, the acceleration of \(m_2\) is opposite in direction and scaled by \(m_1\). This symmetry matters: it ensures momentum conservation and makes the center-of-mass motion simple.
The Two Body Problem Setup
Let the inertial position vectors be \(\mathbf{r}_1\) and \(\mathbf{r}_2\). Define the relative vector \(\mathbf{r}=\mathbf{r}_2-\mathbf{r}_1\). Subtract the equations of motion for \(m_1\) and \(m_2\). The result is a single second-order differential equation for \(\mathbf{r}\):
\[\ddot{\mathbf{r}}=-G(m_1+m_2)\frac{\mathbf{r}}{|\mathbf{r}|^3}.\]
Notice what happened: the relative motion depends only on the sum \(m_1+m_2\), not on the individual masses separately. That is the key simplification behind Keplerian dynamics.
Center of Mass and Reduced Mass
To separate motion cleanly, define the center of mass \(\mathbf{R}=\frac{m_1\mathbf{r}_1+m_2\mathbf{r}_2}{m_1+m_2}\) and the reduced mass \(\mu=\frac{m_1 m_2}{m_1+m_2}\). The center of mass moves with constant velocity when no external forces act:
\[\ddot{\mathbf{R}}=\mathbf{0}.\]
Meanwhile, the relative motion behaves like a single particle of mass \(\mu\) moving in the gravitational field of parameter
\[\kappa=G(m_1+m_2).\]
In practice, for satellite dynamics you often treat \(m_2\) as the central body and \(m_1\) as the spacecraft, so \(\kappa\approx GM_{\text{Earth}}\). The approximation is justified when the spacecraft mass is tiny compared to the planet.
Energy and Angular Momentum Constraints
For the relative motion, define specific angular momentum \(\mathbf{h}=\mathbf{r}\times\dot{\mathbf{r}}\). Because the force is central (always along \(\mathbf{r}\)), \(\mathbf{h}\) is conserved in both magnitude and direction. This conservation explains why the orbit stays in a plane.
Define specific mechanical energy
\[\varepsilon=\frac{1}{2}|\dot{\mathbf{r}}|^2-\frac{\kappa}{|\mathbf{r}|}.\]
Energy conservation follows because the force derives from a potential \(U=-\kappa/|\mathbf{r}|\). The sign of \(\varepsilon\) classifies the orbit: negative for bound ellipses, zero for parabolic escape, positive for hyperbolic flybys.
Conic Sections from the Geometry
Conservation laws lead to the polar equation of a conic. Using the true anomaly \(\theta\) measured from periapsis, the orbit satisfies
\[|\mathbf{r}(\theta)|=\frac{p}{1+e\cos\theta},\]
where \(e\) is eccentricity and \(p=\frac{|\mathbf{h}|^2}{\kappa}\) is the semi-latus rectum. Ellipses have \(0\le e<1\), parabolas have \(e=1\), and hyperbolas have \(e>1\). The conic form is not an assumption; it is the geometric consequence of inverse-square gravity plus conservation of angular momentum.
Example: Circular Orbit Sanity Check
Suppose a spacecraft is in a circular orbit of radius \(r\) around Earth. Then \(|\dot{\mathbf{r}}|=v\) is constant and \(\ddot{\mathbf{r}}\) is purely radial with magnitude \(v^2/r\). Set centripetal acceleration equal to gravitational acceleration:
\[\frac{v^2}{r}=\frac{\kappa}{r^2}\Rightarrow v=\sqrt{\frac{\kappa}{r}}.\]
The specific energy becomes
\[\varepsilon=\frac{1}{2}\frac{\kappa}{r}-\frac{\kappa}{r}=-\frac{\kappa}{2r},\]
which is negative, as expected for a bound orbit. If you ever compute a “circular” orbit and get \(\varepsilon\ge 0\), something is inconsistent: either the radius, the velocity, or the gravitational parameter is off.
Example: From State to Orbit Shape
Given an initial relative state \(\mathbf{r}_0\) and \(\dot{\mathbf{r}}_0\), compute \(\mathbf{h}=\mathbf{r}_0\times\dot{\mathbf{r}}_0\) and \(\varepsilon\). Then compute eccentricity using
\[e=\sqrt{1+\frac{2\varepsilon|\mathbf{h}|^2}{\kappa^2}}.\]
This single number tells you whether the trajectory is elliptical, parabolic, or hyperbolic, before you do any propagation. It’s a small check, but it catches many modeling mistakes early.
Summary of the Reduction
The two body problem becomes manageable because the relative acceleration depends only on \(\kappa=G(m_1+m_2)\), while the center of mass drifts uniformly. With central-force structure, angular momentum and energy are conserved, forcing trajectories to be conic sections. From there, orbital elements are just a compact way to describe \(e\), \(\mathbf{h}\), and the orientation of the conic in space.
2.2 Orbital Elements and Their Physical Meaning
Orbital elements are a compact way to describe a spacecraft’s path using a small set of numbers. The key idea is that each element corresponds to a geometric feature of the orbit—where it sits in space, how it is oriented, and how the spacecraft moves along it. When you can map each element to a physical meaning, you can sanity-check results and reason about maneuvers without getting lost in algebra.
Mind Map: Orbital Elements
Size and Shape
Semi-major axis (a) tells you the “scale” of the orbit. For bound orbits, larger a means less negative specific orbital energy and a longer period. A quick physical check: if you increase a while keeping the central body the same, the spacecraft spends more time completing one revolution.
Eccentricity (e) determines the orbit’s shape. If e = 0, the orbit is a circle. If 0 < e < 1, it is an ellipse with periapsis at the closest approach and apoapsis at the farthest. As e approaches 1 from below, the ellipse becomes more stretched, and the spacecraft spends less time near periapsis relative to apoapsis.
Semi-latus rectum (p) is a distance scale tied to how the conic sits relative to the focus. It appears naturally in the polar form of the orbit equation, where the radius depends on the true anomaly. Even if you rarely compute p directly, it helps connect geometry to dynamics.
Orientation in Space
Inclination (i) measures the tilt of the orbital plane relative to the reference plane (often Earth’s equatorial plane or an inertial reference plane). If i = 0, the orbit lies in the reference plane; if i = 90°, it is perpendicular to it.
Right Ascension of the Ascending Node (Ω) locates the line where the orbit crosses the reference plane. “Ascending” means the spacecraft moves from below the reference plane to above it. Ω is the angle in the reference plane from a chosen inertial direction (like the reference x-axis) to that crossing line.
Argument of Periapsis (ω) is the in-plane angle from the ascending node to periapsis. Think of it as answering: once you know where the orbit crosses the reference plane, where along the orbit is the closest approach point?
Together, i, Ω, and ω define the orbit’s orientation in 3D space. A common best practice is to verify that the computed periapsis direction matches the expected geometry: for example, if you rotate Ω while holding i and ω fixed, the periapsis should rotate around the reference axis accordingly.
Position Along the Orbit
True anomaly (ν) is the most direct “where am I right now?” element. It is the angle between periapsis and the spacecraft’s current position, measured in the orbital plane. If ν = 0, the spacecraft is at periapsis; if ν = 180°, it is at apoapsis for elliptical orbits.
However, ν is not linear in time. That’s why mean anomaly (M) and eccentric anomaly (E) exist.
Eccentric anomaly (E) is an auxiliary angle that maps the ellipse to a circle. It is useful because Kepler’s equation relates E to time in a structured way.
Mean anomaly (M) is defined so that it increases uniformly with time for a two-body orbit. In practice, you compute M from elapsed time, solve Kepler’s equation to get E, then convert to ν for geometry.
A Concrete Example of Physical Meaning
Suppose you have an elliptical orbit with a given central body parameter μ, and you know (a, e, i, Ω, ω, ν).
-
Compute periapsis and apoapsis distances using:
- r_p = a(1 − e)
- r_a = a(1 + e) If e increases while a stays fixed, r_p decreases and r_a increases, making the orbit more stretched.
-
Interpret orientation:
- i tells you how much the orbit plane tilts.
- Ω tells you where the orbit crosses the reference plane upward.
- ω tells you where periapsis lies relative to that crossing.
-
Interpret current location:
- ν tells you whether the spacecraft is near periapsis (small ν) or near apoapsis (ν near 180°).
A practical sanity check is to change only one element at a time and observe the expected geometric effect. If you change ν while holding the other elements fixed, the spacecraft should move along the same orbit without changing the orbit’s plane or size.
Mind Map Summary
2.3 Conic Sections and the Geometry of Orbits
Orbits under a central inverse-square gravity field trace conic sections. The key idea is simple: the spacecraft’s path is determined by how much energy it has and how “off-center” the motion is, measured by the eccentricity. Once you see how the geometry maps to physical parameters, many orbit questions become shape questions.
Mind Map: Conic Geometry and Orbital Meaning
The Conic Equation in Polar Form
Place the central body at a focus. In the orbital plane, describe the spacecraft position using polar coordinates
- r: distance from the focus
- θ: angle from the periapsis direction
The orbit has the form
\[ r(\theta)=\frac{p}{1+e\cos\theta} \]
Here, p is the semilatus rectum and e is the eccentricity. The denominator tells you everything: when \(\cos\theta\) is large and positive, the radius shrinks; when it is negative, the radius grows. For bound ellipses, θ runs over a finite range; for hyperbolas, θ approaches limits where the denominator tends to zero in the asymptotic sense.
Eccentricity and Orbit Types
Eccentricity is a dimensionless measure of shape.
- e = 0 gives a circle: \(r=p\) is constant.
- 0 < e < 1 gives an ellipse: the spacecraft alternates between periapsis (closest approach) and apoapsis (farthest point).
- e = 1 gives a parabola: the object escapes with exactly zero excess specific energy.
- e > 1 gives a hyperbola: the object passes by and leaves, with a nonzero excess specific energy.
A practical check: if you know e, you can immediately tell whether the orbit is bound and whether there is a farthest point. Ellipses have both periapsis and apoapsis; parabolas have only periapsis; hyperbolas have periapsis and two “directions to infinity.”
Periapsis, Apoapsis, and Semimajor Axis
Periapsis occurs at \(\theta=0\), so
\[ r_p=\frac{p}{1+e} \]
For ellipses, apoapsis occurs at \(\theta=\pi\), so
\[ r_a=\frac{p}{1-e} \]
For bound orbits, p relates to the semimajor axis a via
\[ p=a(1-e^2) \]
This relation is more than algebra. It means that as e increases toward 1, the same semimajor axis corresponds to a more stretched ellipse: periapsis stays finite while apoapsis grows.
True Anomaly and Geometry Along the Orbit
The true anomaly \(\nu\) is the angle from periapsis to the spacecraft’s current position, measured in the orbital plane. Using \(\nu\) in the conic equation gives
\[ r(\nu)=\frac{p}{1+e\cos\nu} \]
As \(\nu\) increases from 0, \(\cos\nu\) decreases from 1, so r increases from periapsis. For an ellipse, \(\nu=\pi\) lands at apoapsis. This is why many orbit plots label periapsis at one end of the major axis.
Connecting Geometry to Dynamics
The conic shape is not arbitrary; it is tied to the spacecraft’s specific angular momentum h and specific orbital energy ε.
- Larger h (for the same central parameter) tends to produce a “wider” orbit with larger p.
- More positive ε corresponds to e ≥ 1, meaning the spacecraft does not remain bound.
You do not need to compute ε every time to use the geometry. If you already have e and a, you can reconstruct key distances and understand where the spacecraft spends time qualitatively: near periapsis it is closer and typically moves faster; near apoapsis it is farther and moves more slowly.
Example: From Eccentricity to Periapsis and Apoapsis
Suppose an elliptical orbit has semimajor axis \(a=10{,}000,\text{km}\) and eccentricity \(e=0.2\). Then
- Compute \(p=a(1-e^2)=10{,}000(1-0.04)=9{,}600,\text{km}\).
- Periapsis distance: \[ r_p=\frac{p}{1+e}=\frac{9{,}600}{1.2}=8{,}000,\text{km} \]
- Apoapsis distance: \[ r_a=\frac{p}{1-e}=\frac{9{,}600}{0.8}=12{,}000,\text{km} \]
Notice the symmetry around a: \(a=(r_p+r_a)/2\). That relationship is a quick sanity check when you compute distances from orbital elements.
Example: Identifying Orbit Type from Eccentricity
If you are given \(e=1.05\), the orbit is hyperbolic. That means there is only one closest approach at periapsis, and the trajectory has two branches. In the conic equation, the denominator \(1+e\cos\theta\) reaches zero at angles corresponding to the asymptotic directions, which is why hyperbolas have “incoming” and “outgoing” geometry.
Geometry in Three Dimensions
The conic describes the path in the orbital plane. To place it in space, you orient that plane using three angles:
- inclination i tilts the plane relative to a reference plane
- longitude of ascending node Ω sets the line of nodes direction
- argument of periapsis ω rotates within the plane to locate periapsis
Once those are set, the same conic equation for \(r(\nu)\) tells you the spacecraft’s distance at each true anomaly, while the orientation angles determine where that distance occurs in inertial space.
Conic sections are the orbit’s skeleton. With \(e\), a, p, and \(\nu\), you can sketch the shape, locate periapsis and apoapsis, and understand how the spacecraft’s position evolves along the curve—before any heavy numerical propagation begins.
2.4 Propagation Using Kepler Equation and Anomaly Conversions
Orbit propagation for Keplerian motion is mostly bookkeeping: you advance time, solve Kepler’s equation, convert anomalies, and then compute the state. The key is to keep each variable’s meaning straight so you don’t accidentally mix geometry with time.
Mind Map: Kepler Propagation Flow
From Time to Mean Anomaly
For an elliptic orbit, the mean motion is
\[ n = \sqrt{\mu / a^3} \]
and the mean anomaly advances linearly:
\[ M(t) = M_0 + n(t - t_0) \]
Mean anomaly is not an angle you can directly place on the orbit. It is a time-like parameter that becomes an actual geometric angle only after solving Kepler’s equation.
A practical best practice is to normalize \(M\) to a range such as \([-\pi, \pi]\) before iteration. This keeps the numerical solver well-behaved and reduces the chance of slow convergence.
Solving Kepler’s Equation Systematically
Elliptic Orbits
Kepler’s equation for eccentricity \(0 \le e < 1\) is
\[ M = E - e\sin E \]
where \(E\) is the eccentric anomaly. Once \(E\) is found, the rest is direct.
A reliable iteration is Newton’s method:
\[ E_{k+1} = E_k - \frac{E_k - e\sin E_k - M}{1 - e\cos E_k} \]
Good initial guesses matter. A simple choice is \(E_0 = M\) when \(e\) is modest. When \(e\) is larger, using \(E_0 = \pi\) for \(M\) near \(\pi\) often helps, because the function \(E - e\sin E\) flattens near apocenter.
Hyperbolic Orbits
For \(e > 1\), use the hyperbolic anomaly \(H\):
\[ M = e\sinh H - H \]
Newton’s method becomes
\[ H_{k+1} = H_k - \frac{e\sinh H_k - H_k - M}{e\cosh H_k - 1} \]
A common stable starting point is \(H_0 = \operatorname{asinh}(M/e)\), which roughly matches the linear behavior for small \(H\).
Anomaly Conversions Without Guesswork
Elliptic: Eccentric to True Anomaly
After solving for \(E\), compute radius:
\[ r = a(1 - e\cos E) \]
Then convert to true anomaly \(\nu\). Two equivalent formulas are useful; choose the one that avoids numerical trouble.
A robust approach uses \(\tan(\nu/2)\):
\[ \tan\left(\frac{\nu}{2}\right) = \sqrt{\frac{1+e}{1-e}},\tan\left(\frac{E}{2}\right) \]
If you prefer sine and cosine directly:
\[ \cos\nu = \frac{\cos E - e}{1 - e\cos E}, \quad \sin\nu = \frac{\sqrt{1-e^2},\sin E}{1 - e\cos E} \]
Using \(\operatorname{atan2}(\sin\nu, \cos\nu)\) prevents quadrant errors.
Hyperbolic: Hyperbolic to True Anomaly
For hyperbolic motion,
\[ r = a(e\cosh H - 1) \]
with \(a\) taken as the (negative) semi-major axis in the standard convention. Convert via
\[ \tanh\left(\frac{\nu}{2}\right) = \sqrt{\frac{e+1}{e-1}},\tanh\left(\frac{H}{2}\right) \]
or compute \(\cos\nu\) and \(\sin\nu\) from \(H\) and again use \(\operatorname{atan2}\).
Example: One Propagation Step for an Elliptic Orbit
Assume \(\mu = 398600,\text{km}^3/\text{s}^2\), \(a = 7000,\text{km}\), \(e = 0.1\), and \(M_0 = 20^\circ\) at \(t_0\). Propagate by \(\Delta t = 600,\text{s}\).
-
Mean motion: \[ n = \sqrt{\mu/a^3} \approx \sqrt{398600/7000^3} \approx 0.001078,\text{rad/s} \]
-
Mean anomaly: \[ M = 20^\circ + n\Delta t \approx 0.3491 + (0.001078)(600) \approx 1.006,\text{rad} \]
-
Solve \(M = E - e\sin E\). Start with \(E_0 = M\approx 1.006\). After a couple Newton iterations you get \(E \approx 1.105,\text{rad}\).
-
Radius: \[ r = a(1 - e\cos E) \approx 7000(1 - 0.1\cos 1.105) \approx 7000(1 - 0.1\cdot 0.447) \approx 6659,\text{km} \]
-
True anomaly: \[ \nu = 2\arctan\left(\sqrt{\frac{1+e}{1-e}}\tan\frac{E}{2}\right) \approx 2\arctan\left(\sqrt{\frac{1.1}{0.9}}\tan 0.5525\right) \approx 1.214,\text{rad} \approx 69.6^\circ \]
At this point, you have the geometry needed for perifocal position and velocity. The remaining steps are frame rotations using \(\Omega, i, \omega\), which are covered in the next subsection of the chapter.
Common Implementation Pitfalls
- Mixing anomaly types: mean anomaly \(M\) is time-like; eccentric anomaly \(E\) is geometry-like.
- Quadrant mistakes: always compute \(\nu\) with \(\operatorname{atan2}\) when using sine and cosine.
- Solver fragility near \(e\to 1\): iteration tolerances should be tighter, and initial guesses should reflect the orbit’s shape.
- Forgetting normalization: keep angles in a consistent range before iteration to avoid unnecessary steps.
2.5 Practical Example Computing State Vectors from Orbital Elements
Turning orbital elements into a position and velocity vector is where “geometry” becomes “motion.” The workflow below is systematic: start with the elements, build the orbit in its own plane, rotate it into an inertial frame, then compute the state using the current anomaly.
Mind Map: From Elements to State Vectors
Example Setup
Assume an Earth-centered inertial frame (IJK). Use μ = 398600.4418 km³/s².
Given elements at the epoch:
- Semi-major axis: a = 7000 km
- Eccentricity: e = 0.01
- Inclination: i = 45°
- Right ascension of ascending node: Ω = 30°
- Argument of periapsis: ω = 40°
- Mean anomaly: M = 20°
We will compute the inertial state at this same epoch, so M is already the anomaly at the time of interest.
Step 1: Solve Kepler’s Equation
For an elliptic orbit, solve for eccentric anomaly E:
- M = E - e sin E
Convert degrees to radians for computation: M = 0.349066 rad.
A quick numerical solve (Newton’s method) gives E ≈ 0.3560 rad.
Convert E to true anomaly ν using:
- tan(ν/2) = sqrt((1+e)/(1-e)) * tan(E/2)
With e = 0.01 and E ≈ 0.3560 rad, this yields ν ≈ 0.3630 rad (about 20.8°).
Step 2: Compute Perifocal Position and Velocity
Perifocal coordinates (PQW) place the orbit in the x-y plane with the x-axis pointing toward periapsis.
Radius:
- r = a(1 - e cos E)
- r ≈ 7000(1 - 0.01 cos 0.3560)
- r ≈ 6930.7 km
Perifocal position:
- x_p = r cos ν
- y_p = r sin ν
- z_p = 0
So:
- x_p ≈ 6930.7 cos 0.3630 ≈ 6407.0 km
- y_p ≈ 6930.7 sin 0.3630 ≈ 2517.0 km
Perifocal velocity can be computed using the standard relations:
- h = sqrt(μ a (1 - e²))
- v_xp = - (μ/h) sin ν
- v_yp = (μ/h) (e + cos ν)
- v_zp = 0
Compute h:
- h ≈ sqrt(398600.4418 * 7000 * (1 - 0.0001)) ≈ 52822.3 km²/s
Then:
- v_xp ≈ - (398600.4418/52822.3) sin 0.3630 ≈ -4.36 km/s
- v_yp ≈ (398600.4418/52822.3)(0.01 + cos 0.3630) ≈ 7.53 km/s
So the perifocal state is:
- r_PQW ≈ [6407.0, 2517.0, 0] km
- v_PQW ≈ [-4.36, 7.53, 0] km/s
Step 3: Rotate from Perifocal to Inertial
The rotation from PQW to IJK is:
- r_IJK = R3(Ω) R1(i) R3(ω) r_PQW
- v_IJK = R3(Ω) R1(i) R3(ω) v_PQW
Using the combined direction cosines, the inertial components are:
- r_x = (cosΩ cosω - sinΩ sinω cos i) x_p + (-cosΩ sinω - sinΩ cosω cos i) y_p
- r_y = (sinΩ cosω + cosΩ sinω cos i) x_p + (-sinΩ sinω + cosΩ cosω cos i) y_p
- r_z = (sinω sin i) x_p + (cosω sin i) y_p
Apply the same coefficients to v_xp and v_yp.
With i = 45°, Ω = 30°, ω = 40°:
- r_IJK ≈ [ -2.07e3, 6.26e3, 4.00e3 ] km
- v_IJK ≈ [ -7.50, -1.93, 3.20 ] km/s
(Values are rounded; small differences come from the Kepler solve tolerance.)
Step 4: Sanity Checks That Save Time
- Radius check: verify |r_IJK| ≈ 6930.7 km.
- Angular momentum direction: compute h_vec = r × v and confirm its magnitude is close to h and its orientation matches i and Ω.
- Energy consistency: specific mechanical energy ε = v²/2 − μ/r should equal −μ/(2a).
If any check fails, the usual culprits are angle units (degrees vs radians), a sign error in the velocity formulas, or mixing ω and Ω in the rotation.
Summary of the Integrated Workflow
- Start with a, e, i, Ω, ω, and M.
- Solve Kepler’s equation for E, then convert to ν.
- Compute r, then perifocal r and v.
- Rotate perifocal vectors into the inertial frame.
- Validate with radius, angular momentum, and energy checks.
3. Perturbation Theory for Realistic Orbits
3.1 Sources of Perturbations in Spaceflight Dynamics
A two-body orbit is the clean baseline: one central gravity field, no atmosphere, no thrust, no third bodies. Real spacecraft live in a messier universe, so perturbations are best treated as additional accelerations added to the nominal model. The practical question is not “Which perturbations exist?” but “Which ones matter for the time span, altitude, and accuracy target of the mission?”
Mind Map: Perturbation Sources
Gravity Perturbations That Change the Orbit Shape
Earth’s gravity is not perfectly spherical. The dominant correction is the oblateness term, often summarized by J2. Its effect is mostly secular: the orbital plane and the argument of perigee drift over time. A useful way to see why is to remember that an oblate Earth has a stronger equatorial bulge; the spacecraft “feels” a different effective gravity depending on latitude, so the orbit elements do not stay fixed.
Higher-order harmonics (J3, J4, tesseral terms) add additional periodic and mixed secular behavior. They matter most when you need accurate long arcs or when the orbit geometry makes certain harmonics resonate with the spacecraft’s motion.
Third-body gravity from the Moon and Sun is another major source. Unlike J2, third-body effects often show up as long-period variations in eccentricity and inclination. A simple mental model is to treat the third body as adding a slowly varying tidal acceleration across the spacecraft’s orbit, which means the perturbation depends on the spacecraft’s position relative to both Earth and the third body.
Relativistic corrections are usually small compared with classical gravity, but they can be important for precise orbit determination. In practice, they enter through the equations of motion and through the time scales used to interpret tracking data.
Non-Gravitational Forces That Eat Energy and Add Bias
Atmospheric drag is the most altitude-sensitive perturbation. The drag acceleration is proportional to atmospheric density and to the square of the relative speed between the spacecraft and the atmosphere. That relative speed is not just orbital speed; it depends on Earth rotation and the spacecraft’s attitude through the effective cross-sectional area.
A good best practice is to separate “model structure” from “model parameters.” The structure is the drag law form; the parameters include density model inputs and ballistic coefficient. If you get the structure right but the density wrong, you’ll see systematic residuals in orbit determination.
Solar radiation pressure acts like a gentle push away from the Sun. It depends on the spacecraft’s effective reflectivity and on whether the spacecraft is in sunlight or in Earth’s shadow. Shadow modeling is easy to get wrong near eclipse boundaries, so it’s worth implementing a robust geometry check for sunlight status.
Thermal forces are often smaller than drag and solar radiation pressure, but they can be persistent and hard to absorb into random noise. They arise from anisotropic emission and reflection of heat, which depends on spacecraft geometry and attitude. Even when you don’t model them explicitly, you should expect them to appear as biases unless the attitude strategy averages them out.
Spacecraft and Operational Perturbations That Masquerade as Dynamics
Any thrust changes the orbit by adding acceleration. Even “small” attitude control activity can matter over long durations because it changes momentum and can slightly alter the effective drag and radiation environment. Mass properties changes also affect how the spacecraft responds to forces, especially when the center of mass shifts as propellant is depleted.
Finally, measurement and modeling mismatches can look like dynamics errors. Time tagging, light-time correction, and antenna phase center offsets can create consistent residual patterns. Treat these as part of the perturbation ecosystem: the orbit model is only as good as the measurement model that interprets it.
Example: Ranking Perturbations for a Low Earth Orbit
Suppose you have a 400 km circular orbit and you want centimeter-level tracking for a two-week arc. Drag is likely dominant because density is high enough that energy loss accumulates quickly. J2 is also dominant for element drift, especially for inclination and argument of perigee. Solar radiation pressure is usually smaller than drag at this altitude but still contributes measurable periodic effects. Third-body gravity and relativistic terms may be smaller, yet they can still be required to prevent systematic drift in the estimated orbit.
A practical workflow is to start with the simplest model, propagate, compare against tracking residuals, then add perturbations one by one. When a new term reduces residual structure without overfitting, you’ve found a perturbation that actually matters for your accuracy goal.
3.2 Variational Equations and the Concept of Osculating Elements
A spacecraft’s motion under perturbations is rarely perfectly Keplerian. Still, at every instant you can represent the actual trajectory as if it were Keplerian, using an instantaneous set of orbital elements. Those elements are called osculating elements because the Keplerian conic “kisses” the true path in phase space: the position and velocity match at that instant.
Core Idea of Osculating Elements
Let the true state be \(\mathbf{x}(t)=[\mathbf{r}(t),\mathbf{v}(t)]\). Choose a parameterization \(\mathbf{p}(t)\) that maps elements to state, so \(\mathbf{x}=\mathbf{f}(\mathbf{p})\). In a purely Kepler problem, \(\mathbf{p}\) would be constant. With perturbations, \(\mathbf{p}(t)\) changes so that \(\mathbf{f}(\mathbf{p}(t))\) continues to equal the true \(\mathbf{x}(t)\) at each time.
The key constraint is the osculation condition: the instantaneous Keplerian orbit defined by \(\mathbf{p}(t)\) must reproduce the current \(\mathbf{r}(t)\) and \(\mathbf{v}(t)\). That requirement forces the element rates to absorb whatever the perturbing acceleration does.
Variational Equations from Sensitivity
Variational equations describe how small changes in initial conditions affect the state later. Consider a nominal trajectory \(\mathbf{x}(t)\) and a nearby one \(\mathbf{x}(t)+\delta\mathbf{x}(t)\). The dynamics are
\[\dot{\mathbf{x}}=\mathbf{g}(\mathbf{x},t)\]
Linearizing around the nominal gives
\[\delta\dot{\mathbf{x}}=\mathbf{A}(t),\delta\mathbf{x},\quad \mathbf{A}(t)=\left.\frac{\partial \mathbf{g}}{\partial \mathbf{x}}\right|_{\mathbf{x}(t)}\]
This is the variational equation. In practice, you integrate the state and the sensitivity matrix together. The result is a local linear map from initial perturbations to later state perturbations.
From State Variations to Element Variations
Because elements are functions of state, \(\mathbf{p}=\mathbf{h}(\mathbf{x})\), small changes satisfy
\[\delta\mathbf{p}=\mathbf{H}(t),\delta\mathbf{x},\quad \mathbf{H}(t)=\left.\frac{\partial \mathbf{h}}{\partial \mathbf{x}}\right|_{\mathbf{x}(t)}\]
Now connect this to osculation. The element rates are not arbitrary; they must keep the mapping \(\mathbf{x}=\mathbf{f}(\mathbf{p})\) consistent with the true perturbed motion. A convenient way to see this is to differentiate \(\mathbf{x}=\mathbf{f}(\mathbf{p}(t))\):
\[\dot{\mathbf{x}}=\frac{\partial \mathbf{f}}{\partial \mathbf{p}}\dot{\mathbf{p}}\]
But \(\dot{\mathbf{x}}\) is also determined by the dynamics, which include the perturbing acceleration. Therefore, \(\dot{\mathbf{p}}\) is chosen so that the derivative of the osculating Keplerian state matches the actual derivative. That matching is exactly what the variational framework helps formalize: it tells you how changes propagate while the osculation constraint keeps the elements tied to the true state.
Mind Map: the Relationships
Example: Why Osculation Matters
Suppose you use a set of elements \(\mathbf{p}(t)\) that evolve according to some averaged or simplified model. If you do not enforce the osculation condition, the elements may drift away from the true \(\mathbf{r},\mathbf{v}\) even if they predict the right long-term trends. The immediate symptom is a mismatch in phase space: the Keplerian orbit implied by \(\mathbf{p}(t)\) will not have the same velocity direction and magnitude as the true trajectory at that instant.
A quick check is to compute the Keplerian state from your elements and compare it to the propagated state. If the difference is nonzero at the same time tag, your elements are not osculating for that model.
Example: Linear Sensitivity with a Small Initial Error
Take a nominal orbit and perturb the initial position by a tiny vector \(\delta\mathbf{r}_0\) while keeping \(\delta\mathbf{v}_0=\mathbf{0}\). Integrate the variational equations to obtain \(\delta\mathbf{x}(t)\). Then map to element changes using \(\delta\mathbf{p}(t)=\mathbf{H}(t)\delta\mathbf{x}(t)\). This gives you a consistent way to see which elements are most sensitive to the initial position error, without guessing.
Practical Implementation Notes
When you integrate numerically, you typically propagate:
- The nominal state \(\mathbf{x}(t)\).
- The sensitivity matrix \(\mathbf{\Phi}(t)\) satisfying \(\dot{\mathbf{\Phi}}=\mathbf{A}(t)\mathbf{\Phi}\) with \(\mathbf{\Phi}(t_0)=\mathbf{I}\).
If you also want element rates, you compute \(\dot{\mathbf{p}}\) by enforcing the osculation matching between \(\dot{\mathbf{x}}\) from the dynamics and \(\dot{\mathbf{x}}\) from differentiating \(\mathbf{x}=\mathbf{f}(\mathbf{p})\). The result is a set of element trajectories that remain tied to the true motion at every step.
In short: variational equations quantify how uncertainties and perturbations propagate, while osculating elements provide a time-local Keplerian representation that stays consistent with the true perturbed state.
3.3 Linearization and Small Parameter Approximations
Linearization and Small Parameter Approximations
Linearization turns a messy nonlinear model into something you can compute with, while small parameter approximations keep the algebra from exploding. In orbital dynamics, both ideas show up constantly: you start with exact equations of motion, then approximate how small changes in state or parameters affect the result.
Core Idea of Linearization
Suppose the dynamics are written as
\[\dot{\mathbf{x}} = \mathbf{f}(\mathbf{x}, t)\]
Choose a nominal trajectory \(\mathbf{x}_0(t)\) that satisfies \(\dot{\mathbf{x}}_0 = \mathbf{f}(\mathbf{x}_0,t)\). Let the true state be \(\mathbf{x}(t)=\mathbf{x}_0(t)+\delta\mathbf{x}(t)\), where \(\delta\mathbf{x}\) is small. A first-order Taylor expansion gives
\[\dot{\mathbf{x}}_0 + \dot{\delta\mathbf{x}} \approx \mathbf{f}(\mathbf{x}_0,t) + \mathbf{A}(t),\delta\mathbf{x}\]
where \(\mathbf{A}(t)=\left.\frac{\partial \mathbf{f}}{\partial \mathbf{x}}\right|_{\mathbf{x}_0(t)}\). Since \(\dot{\mathbf{x}}_0=\mathbf{f}(\mathbf{x}_0,t)\), the perturbation obeys
\[\dot{\delta\mathbf{x}} = \mathbf{A}(t),\delta\mathbf{x}.\]
This is the backbone of variational equations and sensitivity analysis: the linearized model propagates how errors grow or shrink.
Small Parameter Approximations
Linearization is about small state changes. Small parameter approximations are about small effects. For example, in Earth orbit you might treat the J2 perturbation as small compared to the central \(\mu/r^2\) term. Write the acceleration as
\[\mathbf{a}(\mathbf{x}) = \mathbf{a}_0(\mathbf{x}) + \epsilon,\mathbf{a}_1(\mathbf{x})\]
where \(\epsilon\) is a bookkeeping parameter you set to 1 at the end. If \(\epsilon\) is small, you can approximate the state as \(\mathbf{x}(t)=\mathbf{x}_0(t)+\epsilon,\mathbf{x}_1(t)\). Substituting and matching powers of \(\epsilon\) yields a linear differential equation for \(\mathbf{x}_1\) driven by the known nominal motion.
A practical rule: if the neglected term is quadratic in a small quantity (like \(\delta r/r\) or \(J_2\)), then first-order approximations usually capture the dominant behavior over moderate time spans.
Mind Map of the Workflow
Example: Linearizing Two-Body Motion with a Small Radial Error
Consider two-body dynamics with \(\mathbf{a}_0=-\mu\mathbf{r}/r^3\). Let the nominal orbit be circular with radius \(r_0\), and suppose the actual initial position has a small radial offset \(\delta r\) while velocity matches the nominal circular speed. The linearized model predicts how \(\delta r\) evolves.
For circular motion, the perturbation decomposes naturally into radial and along-track components. The radial error behaves like a harmonic oscillation with frequency equal to the mean motion \(n=\sqrt{\mu/r_0^3}\) (in the simplest linearized setting). Concretely, if \(\delta r/r_0=10^{-3}\), then the linearized radial displacement stays on the order of \(10^{-3} r_0\) for many orbital periods, while nonlinear effects (like eccentricity growth) remain small because they are driven by higher-order terms.
This is a good “sanity check” practice: pick a perturbation you can reason about geometrically, then verify the linear model reproduces the expected qualitative behavior.
Example: Small J2 Approximation and First-Order Forcing
Let the acceleration be
\[\mathbf{a} = -\frac{\mu\mathbf{r}}{r^3} + \epsilon,\mathbf{a}_{J2}(\mathbf{r})\]
Choose \(\mathbf{x}_0(t)\) as the two-body solution. The first-order correction \(\mathbf{x}_1(t)\) satisfies a linear equation of the form
\[\dot{\mathbf{x}}_1 = \mathbf{A}_0(t),\mathbf{x}_1 + \mathbf{b}(t)\]
where \(\mathbf{A}_0(t)\) is the Jacobian of the two-body dynamics along \(\mathbf{x}_0\), and \(\mathbf{b}(t)\) is the J2 acceleration evaluated on the nominal trajectory (scaled by the bookkeeping factor). The key point is that \(\mathbf{b}(t)\) is known once \(\mathbf{x}_0\) is known, so the correction is computed without re-solving the full nonlinear system.
A practical best practice is to compute the size of the forcing term relative to the central acceleration at the same radius. If the ratio is, say, \(10^{-3}\) to \(10^{-4}\), then first-order J2 effects are typically dominant, and second-order terms are smaller by roughly another factor of that ratio.
Validation Without Overconfidence
Linearization is only as good as the “smallness” assumption. A disciplined workflow is:
- Pick a nominal trajectory.
- Apply a perturbation \(\delta\mathbf{x}\) or a small effect \(\epsilon\).
- Propagate both the nonlinear model and the linearized model for a short interval.
- Compare \(\delta\mathbf{x}*{\text{linear}}\) to \(\delta\mathbf{x}*{\text{nonlinear}}\).
If the discrepancy grows faster than expected (for instance, roughly proportional to the square of the perturbation magnitude), then the neglected higher-order terms are no longer negligible, and you should reduce the perturbation or include higher-order terms.
Summary of What You Can Trust
Linearization provides a local, first-order map from small initial errors to state evolution. Small parameter approximations provide a first-order map from small effects to trajectory corrections. Used together, they turn orbital dynamics into a controlled approximation problem: you decide what is small, you compute the first-order response, and you verify that the neglected terms stay small over the interval of interest.
3.4 Gauss Planetary Equations for Acceleration Components
Gauss planetary equations connect a spacecraft’s applied acceleration to the time rates of change of its orbital elements. The key idea is simple: instead of pushing directly on position and velocity, you project the acceleration onto a small set of directions tied to the orbit’s geometry, then translate those projections into element changes.
Mind Map: Gauss Planetary Equations
Foundational Setup: Orbital Elements and the Local Frame
Start with the classical elements: semi-major axis \(a\), eccentricity \(e\), inclination \(i\), right ascension of the ascending node \(\Omega\), argument of perigee \(\omega\), and mean anomaly \(M\). Gauss equations are written in terms of the true anomaly \(f\), because the orbit’s instantaneous geometry is easiest to express there.
Define the local orbital frame:
- \(\hat{\mathbf{R}}\): radial unit vector along \(\mathbf{r}\)
- \(\hat{\mathbf{T}}\): transverse unit vector in the direction of motion within the orbital plane
- \(\hat{\mathbf{N}}\): normal unit vector along \(\mathbf{h}=\mathbf{r}\times\mathbf{v}\)
Decompose the perturbing acceleration \(\mathbf{a}_p\) as \[ \mathbf{a}_p = R,\hat{\mathbf{R}} + T,\hat{\mathbf{T}} + N,\hat{\mathbf{N}}. \] Here \(R,T,N\) are scalar components in m/s².
Core Equations: Element Rates from Acceleration Components
Let \(p=a(1-e^2)\) be the semi-latus rectum and \(h=\sqrt{\mu p}\) the specific angular momentum. With \(\mu\) the gravitational parameter, the Gauss equations for the time derivatives of the elements can be expressed as:
\[ \dot{a} = \frac{2a^2}{h}\left[e\sin f,R + \frac{p}{r},T\right] \] \[ \dot{e} = \frac{1}{h}\left[ p\sin f,R + \left((p+r)\cos f + r e\right)T \right] \] \[ \dot{i} = \frac{r\cos(\omega+f)}{h},N \] \[ \dot{\Omega} = \frac{r\sin(\omega+f)}{h\sin i},N \] \[ \dot{\omega} = \frac{1}{h e}\left[-p\cos f,R + (p+r)\sin f,T\right] - \frac{r\sin(\omega+f)\cos i}{h\sin i},N \] \[ \dot{M} = n - \frac{1}{h}\left[\frac{2r}{a},T + \frac{(1-e^2)}{e}\cos f,R\right] \] where \(r=\frac{p}{1+e\cos f}\) and \(n=\sqrt{\mu/a^3}\).
A practical note: these formulas assume the elements are osculating, meaning they match the instantaneous conic that would result if the perturbation vanished at that moment. That’s why the equations use \(f\) and the orbit-frame projections rather than global coordinates.
Systematic Interpretation of Each Component
- Radial acceleration \(R\) changes the orbit’s shape and orientation within the plane. It directly affects \(\dot{a}\) through the \(e\sin f\) term, so it matters most when the orbit is not circular and the spacecraft is near quadrature in true anomaly.
- Transverse acceleration \(T\) is the workhorse for energy change. It appears in \(\dot{a}\) multiplied by \(p/r\), which is essentially a geometric scaling of how effectively tangential acceleration modifies orbital speed.
- Normal acceleration \(N\) is the driver of plane changes. It governs \(\dot{i}\) and \(\dot{\Omega}\) through \(\cos(\omega+f)\) and \(\sin(\omega+f)\), so the same \(N\) can either tilt the plane or rotate the node depending on where you are in the orbit.
Example: Pure Transverse Acceleration at Perigee
Consider a mildly eccentric orbit with \(e=0.1\). At perigee, \(f=0\), so \(\sin f=0\) and \(\cos f=1\). Suppose the perturbing acceleration is purely transverse: \(R=0\), \(N=0\), \(T\neq 0\).
Then:
- \(\dot{a} = \frac{2a^2}{h}\left[0 + \frac{p}{r}T\right] = \frac{2a^2}{h}\frac{p}{r}T\). Since \(r=p/(1+e)\) at perigee, \(p/r=1+e\), so \(\dot{a}\) scales with \((1+e)T\).
- \(\dot{e}\) becomes \(\dot{e} = \frac{1}{h}\left[0 + \left((p+r)\cdot 1 + r e\right)T\right]\), showing that tangential acceleration at perigee changes eccentricity in a way tied to both \(p\) and \(r\).
- Plane elements \(i,\Omega\) do not change because \(N=0\).
This is a good sanity check: tangential thrust changes energy and often eccentricity, but it should not tilt the orbit.
Example: Pure Normal Acceleration and Node Change
Now set \(R=0\), \(T=0\), and let \(N\neq 0\). Then \(\dot{a}=\dot{e}=0\) immediately from the equations, while \[ \dot{\Omega} = \frac{r\sin(\omega+f)}{h\sin i},N, \qquad \dot{i} = \frac{r\cos(\omega+f)}{h},N. \] If you choose \(\omega+f\) so that \(\sin(\omega+f)=0\), then \(\dot{\Omega}=0\) and the same normal acceleration produces only inclination change. If instead \(\cos(\omega+f)=0\), then \(\dot{i}=0\) and you get node rotation without changing inclination.
Implementation Best Practices
- Compute \(r\), \(p\), \(h\), and \(n\) consistently from the current elements before evaluating the rates.
- Use a single sign convention for \(R,T,N\) tied to the direction of \(\hat{\mathbf{R}},\hat{\mathbf{T}},\hat{\mathbf{N}}\). A flipped transverse axis often shows up as eccentricity changing when it shouldn’t.
- Handle near-singular cases: \(\dot{\Omega}\) and parts of \(\dot{\omega}\) contain \(\sin i\) and \(e\) in denominators. For near-circular or near-equatorial orbits, switch to element sets that avoid these singularities.
- Validate with component tests: run three short checks—pure \(R\), pure \(T\), pure \(N\)—and confirm only the expected elements move.
Mind Map: Common Pitfalls
Gauss planetary equations become powerful when you treat them as a disciplined pipeline: project acceleration into \(R,T,N\), compute the orbit geometry at the current \(f\), then update element rates with consistent conventions. The equations are compact, but the reliability comes from the bookkeeping.
3.5 Practical Example Modeling a Simple Drag Perturbation on Elements
We model a spacecraft in low Earth orbit where atmospheric drag is the dominant non-conservative effect. The goal is to start from a clean Keplerian orbit, add a simple drag model, and observe how the orbital elements change over time. We’ll use osculating elements, meaning the elements at each instant correspond to a Keplerian orbit tangent to the true trajectory.
Mind Map: Drag Perturbation on Elements
Step 1: Start with a Keplerian Orbit
Assume Earth’s gravitational parameter is \(\mu = 398600.4418,\text{km}^3/\text{s}^2\). Pick an initial orbit with elements (angles in degrees):
- Semi-major axis \(a_0 = 7000,\text{km}\)
- Eccentricity \(e_0 = 0.01\)
- Inclination \(i_0 = 51.6^\circ\)
- Right ascension of ascending node \(\Omega_0 = 0^\circ\)
- Argument of perigee \(\omega_0 = 0^\circ\)
- True anomaly \(\nu_0 = 0^\circ\)
Convert \((a,e,i,\Omega,\omega,\nu)\) to position and velocity \((\mathbf r,\mathbf v)\) using standard two-body geometry. This conversion matters because drag depends on velocity relative to the atmosphere, not directly on elements.
Step 2: Define a Simple Drag Acceleration
Use a common simplified drag form:
\[ \mathbf a_D = -\frac{1}{2},\frac{\rho,C_D,A}{m},|\mathbf v_{rel}|,\mathbf v_{rel} \]
Here \(\mathbf v_{rel} = \mathbf v - \mathbf v_{atm}\). For a basic example, take the atmosphere to rotate with Earth and ignore winds, so \(\mathbf v_{atm} = \boldsymbol{\omega}_E \times \mathbf r\). Define the ballistic coefficient \(\beta = m/(C_D A)\), giving:
\[ \mathbf a_D = -\frac{1}{2\beta},\rho,|\mathbf v_{rel}|,\mathbf v_{rel} \]
For density, use an exponential model in altitude \(h = |\mathbf r| - R_E\):
\[ \rho(h) = \rho_0,\exp\left(-\frac{h-h_0}{H}\right) \]
Pick reasonable constants for demonstration, for example \(R_E=6378,\text{km}\), \(\rho_0=3.614\times 10^{-13},\text{kg/km}^3\) at \(h_0=200,\text{km}\), and scale height \(H=88,\text{km}\). The exact numbers aren’t the point; the workflow is.
Step 3: Project Drag into the Orbital Frame
Gauss planetary equations require acceleration components in the local orbital frame: radial \(R\), transverse \(T\), and normal \(N\). Compute unit vectors:
- \(\hat{\mathbf e}_R = \mathbf r/|\mathbf r|\)
- \(\hat{\mathbf e}_N = \mathbf h/|\mathbf h|\), where \(\mathbf h=\mathbf r\times\mathbf v\)
- \(\hat{\mathbf e}_T = \hat{\mathbf e}_N \times \hat{\mathbf e}_R\)
Then:
\[ R = \mathbf a_D\cdot \hat{\mathbf e}_R,\quad T = \mathbf a_D\cdot \hat{\mathbf e}_T,\quad N = \mathbf a_D\cdot \hat{\mathbf e}_N \]
For drag, \(N\) is often small because drag is mostly opposite velocity, which lies in the orbital plane. Still, compute it; don’t assume.
Step 4: Apply Gauss Planetary Equations
Let \(p=a(1-e^2)\) and \(r=|\mathbf r|\). A standard form of Gauss equations is:
\[ \dot a = \frac{2a^2}{h}\left(e\sin\nu,R + \frac{p}{r},T\right) \]
\[ \dot e = \frac{1}{h}\left(p\sin\nu,R + \left((p+r)\cos\nu + r e\right)T\right) \]
\[ \dot i = \frac{r\cos(\nu+\omega)}{h},N \]
\[ \dot\Omega = \frac{r\sin(\nu+\omega)}{h\sin i},N \]
\[ \dot\omega = \frac{1}{h e}\left(-p\cos\nu,R + (p+r)\sin\nu,T\right) - \frac{r\sin(\nu+\omega)\cos i}{h\sin i},N \]
\[ \dot\nu = \frac{h}{r^2} + \frac{1}{h e}\left(p\cos\nu,R - (p+r)\sin\nu,T\right) \]
In practice, you update \(a,e,i,\Omega,\omega,\nu\) over small time steps \(\Delta t\) using these rates evaluated at the current osculating state.
Step 5: Propagate and Interpret Results
Use a step size like \(\Delta t=10,\text{s}\) for a short demonstration, such as one to two orbits. At each step:
- Convert elements to \((\mathbf r,\mathbf v)\).
- Compute \(\rho(h)\) and \(\mathbf a_D\).
- Project to \((R,T,N)\).
- Compute \(\dot a,\dot e,\dot i,\dot\Omega,\dot\omega,\dot\nu\).
- Update elements with \(\text{new} = \text{old} + \dot{\cdot},\Delta t\).
Sanity checks keep you honest:
- \(\dot a\) should be negative on average because drag removes orbital energy.
- The strongest changes occur near perigee where altitude is lowest and density is highest.
- Inclination and node rates should be small if \(N\) stays near zero.
Minimal Numerical Skeleton
# Inputs: a,e,i,Omega,omega,nu, beta, CdA_over_m via beta
for k in range(Nsteps):
r_vec, v_vec = elements_to_state(a,e,i,Omega,omega,nu)
h_vec = cross(r_vec, v_vec)
v_atm = cross(omega_E_vec, r_vec)
v_rel = v_vec - v_atm
rho = rho0 * exp(-(norm(r_vec)-Re - h0)/H)
aD = -(0.5/beta) * rho * norm(v_rel) * v_rel
eR = r_vec / norm(r_vec)
eN = h_vec / norm(h_vec)
eT = cross(eN, eR)
R = dot(aD, eR); T = dot(aD, eT); N = dot(aD, eN)
rates = gauss_rates(a,e,i,Omega,omega,nu,R,T,N,mu)
a,e,i,Omega,omega,nu = euler_update(a,e,i,Omega,omega,nu,rates,dt)
This example is intentionally simple: it uses an exponential density model, ignores winds, and treats drag as the only perturbation. The payoff is clarity—once the element-rate machinery is working, you can swap in better density models or include additional forces without changing the overall structure.
4. Earth Gravity Modeling and Spherical Harmonics
4.1 Gravitational Potential Expansion and Legendre Polynomials
A spacecraft’s gravity environment is not perfectly spherical, so the gravitational potential \(U\) depends on both radius \(r\) and direction. The standard way to represent this direction dependence is to expand the potential in spherical harmonics. The key mathematical ingredient behind that expansion is the Legendre polynomial family, which describes how the potential varies with the angle between the field point and the planet’s symmetry axis.
Mind Map: Gravitational Potential Expansion
From Spherical Symmetry to Direction Dependence
Start with the idealized spherical potential: \[ U_0(r) = -\frac{\mu}{r} \] where \(\mu = GM\). This depends only on \(r\). Real planets are flattened, so the potential includes angular terms. In Earth-centered modeling, the symmetry axis is the rotation axis, and the direction is captured by the colatitude \(\theta\) (angle from the positive axis). The cosine of that angle, \(\cos\theta\), becomes the natural variable for Legendre polynomials.
Legendre Polynomials as the Angular Basis
Legendre polynomials \(P_l(x)\) form a complete orthogonal basis on \([-1,1]\). In gravity expansions, the argument is \(x = \cos\theta\). The first few are:
- \(P_0(x)=1\)
- \(P_1(x)=x\)
- \(P_2(x)=\tfrac{1}{2}(3x^2-1)\)
- \(P_3(x)=\tfrac{1}{2}(5x^3-3x)\)
Orthogonality matters because it lets you interpret each degree \(l\) as a distinct “shape mode” of the potential. When you truncate the series, you are essentially keeping only the lowest modes that contribute most strongly.
The Gravitational Potential Expansion
A common form for the zonal part (terms with no longitude dependence) is: \[ U(r,\theta) = -\frac{\mu}{r}\left[1 - \sum_{l=2}^{\infty} J_l\left(\frac{R_e}{r}\right)^l P_l(\cos\theta)\right] \] Here \(R_e\) is a reference radius (often Earth’s equatorial radius), and \(J_l\) are dimensionless coefficients encoding the planet’s departure from spherical symmetry. The \(l=1\) term is typically absent for a centered mass distribution.
To connect this to physical intuition: \(J_2\) corresponds to oblateness. Its angular factor \(P_2(\cos\theta)\) is quadratic in \(\cos\theta\), so it produces a smooth “two-lobed” variation between equator and poles.
From Potential to Acceleration
Acceleration is the negative gradient of the potential: \[ \mathbf{a} = -\nabla U \] In spherical coordinates, this means you compute radial and angular derivatives. The radial derivative changes the strength with \(r\), while the angular derivative changes the direction of the force. A practical modeling habit is to compute \(U\) and its derivatives consistently from the same truncated series, rather than mixing approximations.
Example: Interpreting the J2 Term
Consider a spacecraft at radius \(r\) and colatitude \(\theta\). Keeping only \(J_2\), the potential becomes: \[ U \approx -\frac{\mu}{r}\left[1 - J_2\left(\frac{R_e}{r}\right)^2 P_2(\cos\theta)\right] \] with \(P_2(\cos\theta)=\tfrac{1}{2}(3\cos^2\theta-1)\).
At the equator, \(\theta=90^\circ\) so \(\cos\theta=0\) and \(P_2(0)=-\tfrac{1}{2}\). The bracket becomes \(1 + \tfrac{1}{2}J_2(R_e/r)^2\), slightly increasing the magnitude of the negative potential.
At the pole, \(\theta=0\) so \(\cos\theta=1\) and \(P_2(1)=1\). The bracket becomes \(1 - J_2(R_e/r)^2\), reducing the magnitude compared to the equator. This sign change with latitude is exactly why \(J_2\) drives long-term orbital element effects like nodal precession.
Mind Map: Implementation Choices
Practical Best Practices for Series Modeling
- Truncate with intent: If you only need oblateness effects, keep \(l=2\) (and optionally \(l=3\) or \(l=4\) if you model asymmetry). This keeps computation stable and interpretation clean.
- Use consistent variables: Evaluate \(\cos\theta\) from the same position vector you use for \(r\). Small inconsistencies create large angular errors in \(P_l\) for higher \(l\).
- Prefer recurrence for \(P_l\): Computing \(P_l\) directly from closed forms can be less stable for larger \(l\). Recurrence relations typically behave better.
- Sanity-check extremes: At very large \(r\), the correction terms scale like \((R_e/r)^l\), so the potential should approach \(-\mu/r\). At equator and poles, the \(J_2\) contribution should flip sign through \(P_2\).
With these pieces in place, the Legendre expansion becomes more than a formula: it is a controlled way to turn a planet’s shape into a computable gravity model, and then into orbital dynamics through gradients.
4.2 Zonal and Tesseral Harmonics and Their Effects
Real Earth gravity is not perfectly spherical, so the potential includes terms beyond the central inverse-square field. In practice, we start with the spherical harmonic expansion of the gravitational potential and then interpret how specific coefficient groups change the acceleration. The key idea is simple: each harmonic term has a spatial pattern, and the spacecraft feels the gradient of that pattern.
From Spherical Harmonics to Physical Effects
The gravitational potential is written as a sum of a spherical part plus deviations. The spherical part corresponds to the monopole term, while higher-degree terms represent how mass is distributed differently from a perfect sphere. Two families matter most for “where” the gravity pattern repeats:
- Zonal harmonics depend only on latitude. They are symmetric around Earth’s rotation axis, so they do not change with longitude.
- Tesseral harmonics depend on both latitude and longitude. They break the axis symmetry, so they vary as Earth rotates beneath the spacecraft.
A useful mental model: zonal terms are like rings of slightly different density stacked around Earth; tesseral terms are like bumps that repeat around longitude.
Mind Map: Harmonic Effects
Zonal Harmonics and Their Systematic Consequences
J2 as the Baseline Oblateness Effect
The most important zonal term is J2, which represents Earth’s equatorial bulge. Because J2 is axisymmetric, it does not directly force the spacecraft to “chase” a rotating pattern. Instead, it changes the orbit geometry through long-term averaged dynamics.
For a near-Keplerian orbit, J2 produces two classic secular effects:
- Nodal regression: the right ascension of the ascending node drifts steadily. The rate depends strongly on inclination, and it can even vanish at a special inclination where the geometry averages out.
- Argument of perigee drift: the perigee rotates within the orbital plane, also with a strong inclination dependence.
A concrete example: consider two satellites with the same semi-major axis and eccentricity but different inclinations. The one with inclination near the “critical” value experiences much smaller nodal drift, so its ground track repeats more regularly. The other experiences faster node motion, so its ground track shifts more quickly.
Higher Zonal Terms Like J3
J3 is still zonal, so it remains longitude-independent, but it introduces asymmetry between the northern and southern hemispheres. Its averaged effects often appear as longer-period changes compared with J2. In practice, J3 matters most when you need accurate modeling of out-of-plane or perigee-related behavior over longer arcs, or when the orbit geometry makes the J3 contribution non-negligible.
Tesseral Harmonics and Why Longitude Matters
Tesseral terms depend on longitude, so the spacecraft encounters a gravity pattern that changes as Earth rotates. This turns some perturbations from “steady drift” into “periodic forcing.”
Resonances and Long-Period Behavior
The most noticeable tesseral effects occur when the spacecraft’s orbital motion and Earth’s rotation create a commensurability. When the timing aligns, the perturbation does not average out over an orbit, so it accumulates. The result is often a long-period change in eccentricity, inclination, or both.
A practical example: imagine a satellite in a near-circular orbit whose ground track repeats every few days. If the orbital period and Earth rotation align such that a tesseral pattern repeats at the same orbital phase, the eccentricity can grow or shrink over many revolutions. If the alignment is off, the same tesseral term largely cancels out in the average.
Ground-Track Intuition
Zonal terms mainly reshape the orbit orientation in an axisymmetric way, so the ground track changes mostly through node and perigee drift. Tesseral terms add longitudinal structure, so the ground track can show repeating “wiggles” tied to the harmonic pattern.
Modeling Best Practices for Zonal and Tesseral Effects
- Choose truncation consistently: include enough degree and order to match your mission accuracy. For many Earth-orbit problems, J2 and sometimes J3 capture most of the long-term behavior, while tesseral terms may be needed for specific resonant geometries.
- Compute acceleration from the potential gradient: do not treat harmonic effects as independent “add-ons.” The spacecraft acceleration comes from derivatives of the full potential, so implementation details matter.
- Use averaging when appropriate: for long-term trends, averaged equations can be more efficient and easier to interpret. For short-term fidelity, numerical propagation with the full force model is safer.
- Check sensitivity with inclination and altitude: zonal effects scale with orbital geometry, and tesseral resonance strength depends on how the orbital period relates to Earth rotation.
Worked Mini-Example for Intuition
Suppose you propagate two orbits with identical elements except inclination. With only J2, you should see a clear difference in nodal regression rate while the overall eccentricity behavior remains comparatively smooth. Next, add a low-order tesseral term. If the orbit is near a resonance condition, the eccentricity and argument of perigee will show slower, larger-amplitude variations rather than purely steady drift.
That contrast—steady secular drift from zonal terms versus resonance-sensitive long-period behavior from tesseral terms—is the core reason these harmonic families are treated separately in both analysis and implementation.
4.3 Computing Acceleration from Truncated Gravity Models
A truncated gravity model replaces the full Earth gravitational field with a finite set of terms. The goal is to compute the spacecraft acceleration in an inertial or Earth-fixed frame using only those terms. The workflow is consistent: define the gravity model, compute the gravitational potential (or directly the acceleration), differentiate to get acceleration components, then transform to the frame your dynamics equations use.
Mind Map: From Truncated Gravity Terms to Acceleration
Foundational Setup
Start with the spacecraft position expressed in a body-fixed frame where the gravity coefficients are defined. Let the position be \(\mathbf{r} = [x,y,z]^T\), with \(r=|\mathbf{r}|\). Convert to spherical coordinates: geocentric latitude \(\phi\) and longitude \(\lambda\). The gravity model uses the reference radius \(R\) and the gravitational parameter \(\mu\).
A common truncated model uses the fully normalized (or unnormalized, depending on your coefficient source) spherical harmonic expansion. The potential has the form
\[ V(r,\phi,\lambda)=\frac{\mu}{r}\left[1+\sum_{n=2}^{n_{\max}}\left(\frac{R}{r}\right)^n\sum_{m=0}^{n} \bar{P}_{nm}(\sin\phi)\left(\bar{C}_{nm}\cos(m\lambda)+\bar{S}_{nm}\sin(m\lambda)\right)\right] \]
The overbars indicate normalization consistent with the coefficient set you use. Truncation means you stop at \(n_{\max}\) and ignore higher-degree terms.
From Potential to Acceleration
Acceleration is the negative gradient of the potential: \(\mathbf{a}=-\nabla V\). In spherical coordinates, compute three components: radial \(a_r\), latitude \(a_\phi\), and longitude \(a_\lambda\). A practical approach is to compute the needed derivatives term-by-term using the same truncated sums.
Radial Component
The radial component scales strongly with \(r\) because each degree contributes \((R/r)^n\). For each term, differentiation with respect to \(r\) produces factors like \(-(n+1)\) multiplying the original \((R/r)^n\) contribution. This is why higher-degree terms matter mostly at lower altitudes.
Latitude and Longitude Components
Latitude dependence enters through \(\bar{P}_{nm}(\sin\phi)\). The latitude acceleration requires derivatives of the associated Legendre functions with respect to \(\phi\) (or equivalently with respect to \(\sin\phi\) via the chain rule). Longitude dependence comes from \(\cos(m\lambda)\) and \(\sin(m\lambda)\), so \(\partial/\partial\lambda\) introduces factors of \(m\) and swaps sine and cosine.
Converting Spherical Components to Cartesian Acceleration
Once you have \(a_r\), \(a_\phi\), and \(a_\lambda\), convert using unit vectors:
\[ \mathbf{a}=a_r,\mathbf{e}_r+a_\phi,\mathbf{e}_\phi+a_\lambda,\mathbf{e}_\lambda. \]
In terms of \(\phi\) and \(\lambda\), the unit vectors are standard. This conversion is where many implementation mistakes happen, so it’s worth doing a quick check: if you set all non-spherical coefficients to zero, the result should reduce to \(\mathbf{a}=-\mu\mathbf{r}/r^3\).
Example: J2-Only Acceleration as a Sanity Check
Truncating to \(n_{\max}=2\) and keeping only the zonal term \(J_2\) yields a closed-form acceleration that is widely used for debugging. Using geocentric latitude \(\phi\), the J2 perturbation produces latitude-dependent changes while remaining axisymmetric (no longitude dependence). In code, you can compare your general spherical-harmonic gradient implementation against the J2-only result at a few test points.
A simple test procedure:
- Choose a position \(\mathbf{r}\) at a known altitude and inclination.
- Compute acceleration using your truncated model with only \(C_{20}\) (or \(J_2\), depending on coefficient convention).
- Compute acceleration using the J2 closed-form expression.
- Verify the difference is near machine precision (for double precision) or within your expected numerical tolerance.
If the mismatch is large, the usual culprits are normalization mismatch, sign convention in \(V\), or an error in the Legendre derivative.
Implementation Mindset for Truncation
Truncation is not just “stop summing.” It also changes what derivatives you need. If you compute \(V\) first and then differentiate numerically, you risk noise and extra cost. A better practice is to compute the gradient analytically from the same truncated sums, reusing intermediate terms like \(\cos(m\lambda)\), \(\sin(m\lambda)\), and \(\bar{P}_{nm}\).
Finally, keep units consistent: \(\mu\) in \(\text{m}^3/\text{s}^2\), \(R\) and \(r\) in meters, and the resulting acceleration in \(\text{m}/\text{s}^2\). A quick dimensional check catches more bugs than you’d think.
Minimal Pseudocode Flow
Given r_vec in Earth-fixed frame
Compute r, phi, lambda
Initialize sums for potential and gradient terms
For n = 2..nmax
For m = 0..n
Get Pbar_nm(sin(phi)) and dPbar_nm/dphi
Compute trig = Cbar_nm*cos(m*lambda) + Sbar_nm*sin(m*lambda)
Accumulate contributions to ar, aphi, alambda using analytic derivatives
Convert (ar, aphi, alambda) to Cartesian acceleration vector
Return a_vec
This structure keeps the computation systematic: every term you include in the potential has a corresponding contribution to the acceleration components, and truncation stays consistent across all derivatives.
4.4 Resonances and Secular Trends from Low Order Terms
Low order gravity terms like J2 and J3 shape long-term orbit behavior in two distinct ways: secular trends (slow, cumulative changes) and resonances (strong responses when orbital frequencies line up). Both effects can be predicted from the same starting point: a truncated gravitational potential expanded in spherical harmonics, then averaged over fast angles.
Core Idea from Averaging
Start with the disturbing potential from low order terms, then express it in orbital elements. The key step is averaging over the mean anomaly (the fast angle). After averaging, terms that depend on fast angles mostly cancel, leaving terms that depend on slower combinations of angles. Those remaining terms drive secular motion; if a remaining term depends on an angle combination whose time derivative can approach zero, you get a resonance.
Mind Map: How Low Order Terms Create Long Term Behavior
Secular Trends from J2 and Why They Look Predictable
For an Earth orbit, J2 is the main low order term. After averaging, the rates of change of the right ascension of the ascending node \(\Omega\) and the argument of perigee \(\omega\) become approximately constant for a fixed semi-major axis and eccentricity. A practical way to remember the behavior is: the orbit plane precesses and the ellipse rotates within the plane.
A useful best practice is to compute the secular rates using the standard averaged expressions and then sanity-check them against numerical propagation. For example, consider a near-circular LEO with \(a\approx 7000,\text{km}\), \(e\approx 0.001\), and an inclination of \(i=98^\circ\) (a typical sun-synchronous regime). The sign of \(\dot{\Omega}\) flips with inclination relative to the critical inclination near \(63.4^\circ\). If you see \(\dot{\Omega}\) with the wrong sign, the most common causes are swapped inclination definition, unit mistakes, or using degrees where radians are expected.
Secular trends are not just “rates.” They also determine where the orbit spends time in element space. If \(\omega\) precesses slowly, the geometry of ground tracks and eclipse seasons changes gradually, which matters for scheduling and visibility. The important modeling habit is to treat secular motion as a baseline and then add smaller effects (like drag or higher harmonics) as perturbations on top.
Resonances from Angle Combinations and Frequency Matching
A resonance occurs when a slow angle combination in the averaged disturbing function has a time derivative near zero. In practice, this means the orbit’s natural precession rates can align so that a particular combination of \(\Omega\), \(\omega\), and sometimes the satellite’s rotation relative to Earth produces a persistent effect.
A concrete example uses the idea of commensurability between nodal and apsidal precession. Suppose a term in the potential depends on an angle like \[ \phi = k_1,\Omega + k_2,\omega \] for integers \(k_1,k_2\). The resonance condition is roughly \[ \dot{\phi} = k_1,\dot{\Omega} + k_2,\dot{\omega} \approx 0. \] When this holds, the averaged term no longer behaves like a small correction that averages out; instead it can drive noticeable changes in \(e\) and \(i\) through the coupled element equations.
Best practice: identify candidate resonances by computing \(\dot{\Omega}\) and \(\dot{\omega}\) from the dominant low order model, then checking whether \(k_1\dot{\Omega}+k_2\dot{\omega}\) can approach zero over the relevant inclination range. This is faster than brute-force scanning and helps you interpret why a numerical propagation shows a “kink” or a non-smooth element evolution.
How J3 Fits in Without Overcomplicating It
J3 introduces north-south asymmetry and couples the evolution of elements in a way that depends strongly on inclination and eccentricity. While J2 often dominates secular rates, J3 can contribute additional slow-angle terms after averaging. The modeling discipline is to keep the hierarchy clear: use J2 for the first-order secular backbone, then include J3 to capture inclination-dependent deviations and to explain why some orbits show stronger-than-expected long-term changes.
Worked Mini-Example with a Resonance Check
Assume you have two orbits with the same \(a\) and \(e\), but different inclinations. You compute averaged rates from J2 and find that \(\dot{\Omega}\) and \(\dot{\omega}\) differ. Now pick a candidate resonance with small integers \(k_1,k_2\) and evaluate \(\dot{\phi}\). If \(\dot{\phi}\) is near zero for one orbit but not the other, you should expect that orbit’s elements to show amplified long-term behavior when you run a higher-fidelity propagation.
Mind Map: Modeling Workflow
Practical Takeaways
Secular trends from low order terms are the predictable “background motion” of the orbit elements, while resonances are the moments when an angle combination stops behaving like a rapidly varying phase. The most reliable way to model both is to use averaging to separate fast and slow behavior, compute candidate rates from the dominant terms, and validate with propagation so the math and the numerics agree on what the orbit is actually doing.
4.5 Practical Example Evaluating J2 And J3 Effects on Inclined Orbits
We start with the goal: quantify how Earth’s oblateness (J2) and the next asymmetry term (J3) change the motion of an inclined satellite. The practical workflow is: (1) choose an orbit and constants, (2) compute the secular and short-period effects you care about, (3) compare against a simple two-body baseline, and (4) sanity-check the results with a numerical propagation or a quick consistency check.
Mind Map: Evaluate J2 and J3 effects on inclined orbits
Step 1: Choose an Orbit and Constants
Pick a representative low Earth orbit with moderate eccentricity so both node and perigee effects are visible. Example inputs:
- Semi-major axis: a = 7078 km
- Eccentricity: e = 0.001
- Inclination: i = 63.4° (a classic value where certain J2 effects show special behavior)
- Right ascension of ascending node: Ω0 = 40°
- Argument of perigee: ω0 = 30°
- Mean anomaly: M0 = 0°
- Earth constants: μ = 398600.4418 km^3/s^2, R = 6378.137 km
- Gravity coefficients: J2 = 1.08263e-3, J3 = -2.532e-6
Baseline two-body motion keeps the orbital elements constant in the ideal Kepler model. Any element drift you see in Ω or ω is therefore attributable to perturbations.
Step 2: Compute the Dominant J2 Secular Rates
For J2, the standard secular rates (averaged over the orbit) are:
- Mean motion: n = sqrt(μ/a^3)
- Nodal rate:
- dΩ/dt = -(3/2) * n * (R/a)^2 * (J2/(1-e^2)^2) * cos(i)
- Apsidal rate:
- dω/dt = (3/4) * n * (R/a)^2 * (J2/(1-e^2)^2) * (5*cos(i)^2 - 1)
With e so small, (1-e^2)^-2 ≈ 1. The key qualitative checks come for free:
- If i = 90°, cos(i)=0, so the node rate goes to zero.
- If cos(i) changes sign (prograde vs retrograde), the sign of dΩ/dt flips.
- The factor (5*cos^2(i)-1) controls whether ω precesses faster or slower and whether it can change sign.
Now evaluate over one day, Δt = 86400 s:
- ΔΩ ≈ (dΩ/dt) * Δt
- Δω ≈ (dω/dt) * Δt
For i = 63.4°, cos(i) is positive but small enough that the node regression is noticeable without being extreme. The apsidal precession is typically larger in magnitude than the node drift for many LEO cases, but the exact ranking depends on inclination through (5*cos^2(i)-1).
Step 3: Add J3 Effects Without Getting Lost
J3 is smaller by roughly an order of magnitude compared to J2, but it is not just “noise.” It introduces asymmetry about the equator and produces inclination- and argument-dependent effects. In practice, you can treat J3 in two complementary ways:
- Use averaged element-rate expressions when you want long-term trends.
- Use short-period modeling when you want the within-orbit oscillations.
For a systematic example, focus on the long-term behavior of the node and perigee contributions that survive averaging. The J3 secular terms depend on inclination and the geometry of the orbit relative to Earth’s mass distribution. A reliable workflow is:
- Compute the J2-only secular drift of Ω and ω.
- Compute the additional J3-induced drift using the appropriate secular element-rate formulas for your chosen averaging scheme.
- Combine them as ΔΩ_total ≈ (dΩ/dt)_J2 + (dΩ/dt)_J3, and similarly for ω.
Because J3 is sensitive to the sign of the coefficient and the inclination geometry, you should expect the J3 contribution to either slightly accelerate or slightly oppose the J2 trend rather than dominate it.
Step 4: Convert Element Changes into Observable Geometry
Angles are the bridge from dynamics to navigation. Over one day, the node shift changes where the orbital plane intersects the Earth-fixed frame. The perigee shift changes where the ellipse’s closest approach sits along the orbit.
A concrete way to interpret the results:
- If ΔΩ is negative, the ascending node regresses westward in the chosen convention.
- If Δω is positive, the perigee advances along the direction of motion.
Even with tiny e, ω still matters because it sets the orientation of the radius vector relative to the inertial frame.
Step 5: Sanity Checks and a Simple Validation
Do three quick checks before trusting numbers:
- Set J3 = 0 and confirm you recover the J2-only ΔΩ and Δω.
- Set i = 90° and confirm dΩ/dt from J2 goes to zero.
- Reduce e toward 0 and confirm the formulas remain well-behaved.
Then validate with a numerical propagation that includes J2 and J3. Compare the propagated Ω(t) and ω(t) against the analytical drift over the same time span. If the disagreement is large, the usual culprit is mixing averaging assumptions with a time span that is too long for the “secular-only” approximation.
Example Summary for One-Day Comparison
For the chosen orbit, you should find:
- J2 produces the main secular drift in Ω and ω.
- J3 adds a smaller correction that is strongly inclination-geometry dependent.
- The combined effect changes the predicted inertial-to-Earth-fixed pointing of the orbital plane and the location of perigee along the orbit.
That’s the practical point: you don’t just compute rates—you translate them into how the orbit’s geometry evolves, then verify the evolution against a propagation model using the same conventions.
5. Atmospheric Drag and Aerodynamic Effects
5.1 Drag Force Modeling and Relative Velocity Concepts
Drag is the force that turns organized motion into heat. In orbital mechanics it matters because it slowly removes mechanical energy, shrinking or reshaping trajectories over time. Modeling drag starts with one clean idea: drag depends on the spacecraft’s velocity relative to the surrounding atmosphere, not on its velocity relative to Earth.
Mind Map: Drag Modeling from Relative Velocity to Acceleration
Relative Velocity: The Core Quantity
Let v be the spacecraft velocity in an inertial frame. Let vₐ be the atmosphere velocity in the same frame at the spacecraft location and time. The relative wind velocity is
v_rel = v − vₐ
Drag acts opposite v_rel, so the drag acceleration points along −v_rel.
A common baseline atmosphere model assumes the atmosphere co-rotates with Earth at the local position. In that case, vₐ is obtained from Earth’s rotation rate ω and the spacecraft position vector r:
vₐ = ω × r
This choice is simple and often adequate for first-order drag effects. If you include winds, you add a wind velocity term v_wind in the same inertial frame, giving vₐ = ω × r + v_wind.
Drag Force and Acceleration
A widely used form for aerodynamic drag is
F_d = − 1/2 · ρ · C_d · A · |v_rel| · v_rel
where ρ is atmospheric density, C_d is the drag coefficient, and A is reference area. Dividing by spacecraft mass m yields drag acceleration:
a_d = F_d / m = − 1/2 · (ρ · C_d · A / m) · |v_rel| · v_rel
The factor (C_d · A / m) is often grouped into the ballistic coefficient style term. Using it reduces bookkeeping and makes sensitivity checks easier: if you double mass while keeping geometry and aerodynamics fixed, drag acceleration halves.
Direction matters: if v_rel changes sign in a component, the drag acceleration changes accordingly. This is why frame consistency is not optional. A velocity computed in one frame and a density computed in another is a fast route to nonsense.
Atmospheric Density Inputs
Drag modeling requires ρ(r, t). The density is a function of altitude and often depends on solar and geomagnetic activity. In a practical implementation you typically use a parameterized density model that returns ρ given altitude and time inputs.
For conceptual clarity, treat density as a scalar field evaluated at the spacecraft’s current position. Then the only vector work left is v_rel.
Computational Workflow for Each Propagation Step
- Compute spacecraft position r and inertial velocity v.
- Compute atmosphere velocity vₐ using co-rotation ω × r and optionally wind.
- Compute v_rel = v − vₐ and its magnitude |v_rel|.
- Evaluate atmospheric density ρ at the current location.
- Compute drag acceleration a_d = − 1/2 · (ρ · C_d · A / m) · |v_rel| · v_rel.
- Add a_d to the other acceleration terms (e.g., gravity and other perturbations) and advance the state.
A small but useful check: if |v_rel| is near zero, drag acceleration should be near zero too. That sanity check catches many frame or unit mistakes.
Example: Co-Rotating Atmosphere with a Simple Density Model
Assume a spacecraft at position r with inertial velocity v. Use a co-rotating atmosphere so vₐ = ω × r. Let the density model return ρ = 3.0e−12 kg/m³ at the current altitude. Take C_d = 2.2, A = 0.8 m², and m = 500 kg.
Compute:
- v_rel = v − (ω × r)
- k = 1/2 · ρ · C_d · A / m
- a_d = −k · |v_rel| · v_rel
If |v_rel| = 7500 m/s and the relative wind direction is such that v_rel has components (−2000, 7000, 0) m/s, then
- a_d = −k · 7500 · (−2000, 7000, 0)
The sign shows the acceleration points opposite the relative wind: where v_rel is negative, a_d becomes positive, and vice versa. That directional behavior is exactly what you want physically.
Mind Map: Common Modeling Pitfalls
Drag modeling is mostly careful bookkeeping around v_rel and ρ. Once those are consistent, the drag acceleration formula behaves predictably and integrates cleanly with the rest of the orbital dynamics pipeline.
5.2 Atmospheric Density Models and Parameterization Inputs
Atmospheric drag depends on density, and density depends on where you are and when you are there. In practice, you rarely have a perfect density measurement along the whole orbit, so you use a model that turns inputs like altitude, latitude, local solar time, and solar activity into a density value. The best workflow is to treat density modeling as a chain: choose a model, supply its required parameters, validate the output against expected behavior, and then propagate drag effects.
Mind Map: Density Modeling Inputs and Outputs
Foundational Density Dependence on Altitude
A common starting point is the idea that density decreases rapidly with altitude. A simple parameterization is an exponential form:
- ρ(h) = ρ0 · exp(-(h − h0)/H)
Here, H is the scale height. Even if you later use a more sophisticated model, this form is useful because it tells you what to expect: a small change in altitude can produce a large change in density, and the scale height controls how quickly that happens. For a sanity check, compute density at two altitudes separated by, say, 10–20 km and confirm the ratio is consistent with your chosen H.
Parameterization Inputs You Must Provide
Most operational density models require a consistent set of inputs. At minimum, you need the spacecraft state to compute its altitude and the time to compute solar geometry.
-
Altitude and location: Convert the spacecraft position to geodetic latitude and altitude above a reference ellipsoid. Altitude is not the same as distance from Earth’s center; mixing definitions is a classic way to get drag that is consistently too high or too low.
-
Time and solar geometry: Density models often depend on local solar time because the atmosphere heats and cools with the day-night cycle. You therefore need the spacecraft time tag and a method to compute local solar time from longitude.
-
Solar activity proxy: Many models use F10.7 as a scalar measure of solar heating. Higher F10.7 generally increases density at a given altitude because the upper atmosphere expands.
-
Geomagnetic activity proxy: Geomagnetic indices like Ap or Kp represent disturbances that can also increase density, especially at higher altitudes. If your orbit spends time near the poles, geomagnetic effects tend to matter more.
From Inputs to Density Values
A typical empirical model can be thought of as: baseline profile × scale-height adjustment × activity corrections. The baseline profile captures the altitude trend, while the scale height and corrections adjust the profile shape based on solar and geomagnetic drivers.
To use the model correctly, you should also ensure unit consistency:
- Altitude in kilometers or meters must match the model’s expectation.
- Indices must be in the model’s defined units and time averaging windows.
- Density output should be in kg/m³.
A practical best practice is to run the density model at a fixed altitude while varying only one driver (e.g., F10.7) and confirm the response direction matches physical intuition.
Example Parameterization Workflow
Suppose you have a spacecraft at 400 km altitude and you want density for drag propagation.
- Convert the spacecraft position at the epoch to geodetic latitude and altitude.
- Compute local solar time from longitude and the epoch.
- Retrieve solar flux proxy F10.7 for the epoch’s relevant averaging window.
- Retrieve geomagnetic activity proxy Ap for the same window.
- Feed (h, φ, LST, t, F10.7, Ap) into the chosen density model.
- Record ρ and also compute drag acceleration using your drag coefficient and ballistic coefficient.
If you repeat this at two epochs separated by a day, you should see diurnal variation in density due to local solar time, even if altitude and latitude are unchanged.
Mind Map: Model Selection and Parameterization Checks
Advanced Details That Prevent Subtle Errors
Even with correct inputs, density modeling can fail due to implementation details. First, ensure the time tag used for solar geometry matches the time tag used for the activity indices. Second, confirm how the model interpolates indices between provided epochs; linear interpolation is common, but the model may define different averaging behavior. Third, be consistent about what “altitude” means: some models use height above a reference radius, while others use geodetic altitude.
Finally, remember that drag acceleration depends on density and on aerodynamic parameters. If you change density models but keep the same ballistic coefficient and drag coefficient, you should still expect differences in predicted decay rate. That difference is information, not a bug—provided the density outputs pass the sanity checks above.
5.3 Ballistic Coefficient and Spacecraft Aerodynamic Properties
Ballistic coefficient is the bridge between “how the atmosphere pushes” and “how the spacecraft responds.” In drag-dominated regimes, it compresses several aerodynamic and mass properties into one number so you can estimate orbit decay without carrying a full aerodynamic model.
What Ballistic Coefficient Means
Start with the drag acceleration magnitude:
- Drag force scales with dynamic pressure and an effective drag area.
- Acceleration equals force divided by mass.
A common form is
- \(a_D = -\tfrac{1}{2},\rho,v^2,\tfrac{C_D A}{m}\)
Here \(\rho\) is atmospheric density, \(v\) is spacecraft speed relative to the atmosphere, \(C_D\) is the drag coefficient, \(A\) is a reference area, and \(m\) is mass.
Define ballistic coefficient \(\beta\) as
- \(\beta = \tfrac{m}{C_D A}\)
Then
- \(a_D = -\tfrac{1}{2},\rho,v^2,\tfrac{1}{\beta}\)
So a larger \(\beta\) means less deceleration for the same density and speed. That’s the whole idea: it’s mass-per-effective-drag-area.
Aerodynamic Properties You Must Know
Ballistic coefficient depends on aerodynamic properties that are not constants in real flight.
-
Drag coefficient \(C_D\)
- Depends on Reynolds number, Mach number, surface roughness, and attitude.
- For preliminary work, you often use a representative \(C_D\) from a simplified model or a fit to data.
-
Reference area \(A\)
- Must match the definition used in \(C_D\). If you change the area convention, you must change \(C_D\) or you’ll quietly double-count.
- For attitude-varying spacecraft, use an effective area averaged over the attitude distribution.
-
Mass \(m\)
- Changes slowly due to propellant usage, but for drag modeling you typically treat it as piecewise constant between maneuvers.
-
Attitude and cross-section variation
- If the spacecraft rotates, the projected area and effective drag coefficient vary with time.
- A practical approach is to compute \(A(t)\) from geometry and then use an averaged \(C_D A\) over the attitude cycle.
Mind Map: Ballistic Coefficient Modeling
Systematic Modeling Workflow
-
Choose the drag model form Use \(a_D = -\tfrac{1}{2}\rho v^2 \tfrac{C_D A}{m}\) with a clear sign convention and relative velocity direction.
-
Select \(C_D\) and \(A\) conventions Confirm that your \(C_D\) corresponds to the same reference area definition used in your geometry.
-
Handle attitude
- If attitude is stable, treat \(C_D A\) as constant.
- If attitude varies, compute \(A(t)\) and use \(\overline{C_D A}\) over a representative cycle.
-
Compute \(\beta\) Use \(\beta = m/(C_D A)\) and keep it consistent with the drag equation you’re using.
-
Propagate with density and speed The density model supplies \(\rho\), and the orbit propagator supplies \(v\) and the relative velocity direction.
Example: Constant Attitude with Effective Area
Assume a satellite with:
- Mass \(m = 500,\text{kg}\)
- Reference area \(A = 2.0,\text{m}^2\)
- Drag coefficient \(C_D = 2.2\)
Compute
- \(\beta = \tfrac{500}{2.2\times 2.0} = \tfrac{500}{4.4} \approx 114,\text{kg/m}^2\)
If at some point \(\rho = 3\times 10^{-12},\text{kg/m}^3\) and \(v = 7600,\text{m/s}\), then
- \(a_D \approx -\tfrac{1}{2}(3\times 10^{-12})(7600^2)(1/114)\)
Compute \(7600^2 = 5.78\times 10^7\). Then
- \(a_D \approx -0.5\times 3\times 10^{-12}\times 5.78\times 10^7\times 8.77\times 10^{-3}\)
- \(a_D \approx -7.6\times 10^{-7},\text{m/s}^2\)
That magnitude is what you feed into the orbit dynamics as the drag acceleration component.
Example: Attitude Variation and Averaging
Suppose a spacecraft alternates between two orientations each half-cycle:
- State 1: \(A_1 = 1.5,\text{m}^2\), \(C_{D1} = 2.0\)
- State 2: \(A_2 = 2.5,\text{m}^2\), \(C_{D2} = 2.4\)
Compute effective \(C_D A\) average:
- \(\overline{C_D A} = 0.5(C_{D1}A_1 + C_{D2}A_2)\)
- \(\overline{C_D A} = 0.5(2.0\times 1.5 + 2.4\times 2.5)\)
- \(\overline{C_D A} = 0.5(3.0 + 6.0) = 4.5,\text{m}^2\)
Then \(\beta = m/\overline{C_D A}\). If \(m=500,\text{kg}\), \(\beta \approx 111,\text{kg/m}^2\). Notice how the larger-area state dominates even with only a modest \(C_D\) change.
Practical Best Practices
- Keep \(C_D A\) as the primary quantity when attitude varies; compute \(\beta\) from that averaged product.
- Check units early: \(\beta\) must be in \(\text{kg/m}^2\) if you use \(a_D = -\tfrac{1}{2}\rho v^2 (C_D A/m)\).
- Use piecewise constants: update \(m\) after maneuvers and update \(C_D A\) after attitude mode changes.
- Validate against tracking by comparing predicted drag acceleration trends to observed orbit changes; if the mismatch is systematic, it often points to \(C_D A\) convention errors or attitude averaging mistakes.
Summary
Ballistic coefficient turns aerodynamic complexity into a usable parameter by folding \(C_D\), projected area, and mass into \(\beta = m/(C_D A)\). With consistent conventions and careful handling of attitude, it provides a reliable way to model drag-driven orbital evolution without pretending the atmosphere is polite.
5.4 Drag Induced Element Changes and Energy Dissipation
Drag is the non-gravitational force that steadily removes orbital energy by converting mechanical motion into heat. In practice, it also changes the shape and orientation of the orbit by nudging the spacecraft’s velocity vector in the direction opposite the relative wind. The key idea is simple: drag is nearly always antiparallel to the velocity relative to the atmosphere, so it tends to reduce speed, which then forces the osculating Keplerian elements to drift.
Mind Map: Drag Effects on Elements
From Drag Acceleration to Element Rates
A common drag model expresses acceleration as
- a drag = - (1/2) * (Cd * A / m) * ρ * v_rel^2 * v_rel_hat
where ρ is atmospheric density, v_rel is the velocity of the spacecraft relative to the rotating atmosphere, and Cd A / m is often packaged into a ballistic coefficient. The minus sign matters: drag always points opposite the relative motion, so it produces negative work on the spacecraft.
To translate this into element changes, decompose drag acceleration into the radial (R), transverse (T), and normal (N) components in the orbital frame. Drag is not purely transverse because the atmosphere rotates and because the velocity direction changes along the orbit. Still, for many Earth orbits, the dominant component is transverse, which is why semi-major axis typically decays most noticeably.
Using Gauss’ planetary equations, the instantaneous rates of the osculating elements depend on R, T, N and on the current orbital geometry (true anomaly, argument of latitude, and so on). A practical best practice is to compute these components directly from the current state and the local atmospheric wind, rather than assuming a fixed direction.
Energy Dissipation and the Semi-Major Axis Drift
For a two-body orbit, specific mechanical energy is
- ε = - μ / (2a)
where a is semi-major axis and μ is Earth’s gravitational parameter. Drag reduces kinetic energy, so ε decreases, which implies a decreases.
A useful consistency check is to compare the predicted energy rate from drag with the element rate implied by the same dynamics. The instantaneous power per unit mass is
- dε/dt = v · a_drag
Since a_drag opposes v_rel, and v_rel is close to v for low wind cases, the dot product is typically negative. If your computed element drift suggests semi-major axis growth while v · a_drag is negative, you likely have a frame or sign error.
How Eccentricity and Orientation Drift
Even though drag always removes energy, it does not remove it uniformly around the orbit. Atmospheric density is higher near perigee, so drag is stronger there. This non-uniformity changes the orbit’s shape.
- Eccentricity tends to decrease for many low-altitude cases because drag preferentially reduces speed near perigee, which tends to circularize the orbit.
- RAAN and argument of perigee drift because the drag direction relative to the orbital frame varies with latitude and because the atmosphere rotates. The normal component N is often smaller than R and T, but it is what slowly changes inclination and the node.
A practical modeling habit: track the element rates over one orbit and look for patterns. If the sign of the RAAN drift flips erratically between adjacent steps, it often indicates numerical noise or an inconsistent definition of the orbital frame axes.
Example: One-Orbit Element Change Using Averaged Drag
Consider a spacecraft in a mildly eccentric low Earth orbit. Use a simple density model ρ = ρ0 exp(-(h - h0)/H) and assume v_rel ≈ v for a first pass. Compute drag acceleration at several true anomalies, project it into R, T, N, and apply Gauss’ equations to get instantaneous element rates.
A systematic workflow:
- Propagate the osculating state over one orbit using the current drag model.
- At each step, compute v_rel using the local atmospheric rotation.
- Convert acceleration to R, T, N.
- Apply Gauss’ equations to update element rates.
- Integrate rates over the orbit to estimate net changes.
Expected outcome: a decreases most strongly, e changes more modestly, and inclination/RAAN shift slowly. If the net change in a is tiny while the computed v · a_drag is large in magnitude, the issue is usually that the element update is not consistent with the same acceleration used in the energy check.
Practical Mind Map for Implementation Checks
Summary of What Changes and Why
Drag removes energy through negative work, which drives semi-major axis decay. Because density and relative velocity vary along the orbit, drag also reshapes the trajectory, typically modifying eccentricity and slowly rotating the orbital plane through smaller normal effects. The most reliable approach is to compute drag acceleration from the local atmosphere and then project it into the orbital frame for element-rate updates, while using v · a_drag as a simple sanity check.
5.5 Practical Example Propagating an Orbit with Exponential Density
This example propagates a low Earth orbit using a simple atmospheric drag model with exponential density. The goal is not to be perfect, but to be consistent: you should be able to reproduce the same qualitative behavior and understand which assumptions drive the result.
Step 1: Choose a Baseline Orbit and State
Start with a Keplerian orbit so you know what “no drag” looks like. Pick a near-circular LEO for clarity: altitude 400 km, inclination 51.6°, and an initial true anomaly of 0°. Convert orbital elements to an inertial state vector (position and velocity) at the chosen epoch. Use an Earth gravitational parameter μ and an Earth radius R⊕.
Best practice: keep the initial orbit purely Keplerian for the first run. Then turn on drag and compare how the semi-major axis and mean motion change over time.
Step 2: Use Exponential Density Along the Orbit
Model atmospheric density as
\[ \rho(h) = \rho_0 \exp\left(-\frac{h}{H}\right) \]
where h is altitude above Earth’s reference radius, ρ0 is density at h = 0, and H is the scale height. For a worked example, choose representative constants such as ρ0 = 1.225 kg/m³ and H = 7.5 km, then compute h(t) from the propagated radius r(t): h = r − R⊕.
Best practice: compute density from the instantaneous altitude, not from a fixed mean altitude. Even in a circular orbit, small numerical errors in r will otherwise leak into the drag model.
Step 3: Compute Drag Acceleration
Use the standard drag acceleration
\[ \mathbf{a}_d = -\frac{1}{2} \frac{C_D A}{m} \rho(h), v_{rel}^2, \hat{\mathbf{v}}_{rel} \]
Here v_rel is the spacecraft velocity relative to the rotating atmosphere. A simple approximation is to subtract Earth’s rotation at the spacecraft’s position: \(\mathbf{v}_{rel} = \mathbf{v} - \boldsymbol{\omega}*E \times \mathbf{r}\). Use a constant ballistic coefficient \(\beta = m/(C_D A)\) so the drag term becomes \(\mathbf{a}*d = -\frac{1}{2\beta} \rho v*{rel}^2 \hat{\mathbf{v}}*{rel}\).
Best practice: verify units early. If β is in kg/m², then ρ in kg/m³ and v in m/s produce acceleration in m/s².
Step 4: Propagate with a Numerical Integrator
Propagate the equations of motion with Earth point-mass gravity plus drag:
\[ \dot{\mathbf{r}} = \mathbf{v}, \quad \dot{\mathbf{v}} = -\mu\frac{\mathbf{r}}{r^3} + \mathbf{a}_d \]
Use a variable-step integrator (Runge–Kutta or similar) and a time span long enough to see measurable decay, such as 3–7 days. Record r(t), semi-major axis a(t) (from state), and along-track energy proxy E(t) = v²/2 − μ/r.
Best practice: run two simulations with identical settings except for drag. The difference in a(t) should be monotonic for this simple model.
Step 5: Interpret Results and Sanity Checks
For exponential density drag, you should observe:
- Semi-major axis decreases gradually, with faster decay when the orbit dips to lower altitudes.
- Orbital period shortens because mean motion increases as energy decreases.
- The orbit remains close to Keplerian shape, but the elements drift.
Sanity checks:
- If you set C_D A/m to zero, decay must vanish.
- If you double H, density falls off more slowly, so decay should be stronger.
- If you ignore Earth rotation in v_rel, decay will be weaker for prograde orbits.
Mind Map: Exponential Density Drag Propagation
Example: A Minimal Parameter Set and Expected Behavior
Assume C_D = 2.2, A = 0.01 m², m = 100 kg, so β = 100/(2.2×0.01) ≈ 4545 kg/m². With the exponential density model, the drag acceleration scales with ρ and v_rel², so the decay rate depends strongly on altitude.
Run the simulation for 5 days. You should see a small but consistent drop in altitude and semi-major axis. If the change is essentially zero, either the drag parameters are too small for the chosen density constants, or the integrator tolerances are too loose and numerical noise dominates.
Practical Implementation Notes
When you compute a(t) from the state, use \[ a = \left(\frac{2}{r} - \frac{v^2}{\mu}\right)^{-1} \] This avoids relying on element conversions that can become inconsistent under perturbations.
Finally, keep the drag model simple and deterministic: constant C_D A/m and exponential density. That way, the trends you observe can be traced directly to the physics in the equations rather than to hidden modeling choices.
6. Thrust Dynamics and Maneuver Modeling
6.1 Impulsive Maneuvers and Delta V Computation
Impulsive maneuvers model thruster firings as instantaneous changes in velocity. That assumption is accurate when the burn duration is short compared with the orbital period and when the spacecraft’s position change during the burn is negligible. In practice, you still compute with finite burns later, but impulsive math is the clean starting point for planning and for sanity checks.
Core Idea: Velocity Jumps Without Position Jumps
An impulsive burn changes the spacecraft state as
- Position: unchanged at the burn epoch
- Velocity: updated by adding a delta V vector
So the post-burn state is simply \(\mathbf{r}^+ = \mathbf{r}^-\) and \(\mathbf{v}^+ = \mathbf{v}^- + \Delta\mathbf{v}\). The delta V direction matters because gravity keeps acting after the burn; you are choosing how to reshape the orbit by rotating and scaling the velocity.
Mind Map: Delta V Computation Workflow
Delta V from Geometry of Velocity
For many mission designs, the burn is planned in the local orbital frame: radial (R), along-track (T), and cross-track (N). If you express the pre-burn velocity as \(\mathbf{v}^-\) and you want a new velocity \(\mathbf{v}^+\), then
\[\Delta\mathbf{v} = \mathbf{v}^+ - \mathbf{v}^-\]
In a pure prograde burn, \(\Delta\mathbf{v}\) is aligned with the along-track direction, so only the tangential component changes. In a pure plane change, \(\Delta\mathbf{v}\) is perpendicular to the velocity direction, rotating the orbital plane while keeping speed the same in the idealized model.
Plane Change Computation
If you change the inclination by an angle \(\Delta i\) at a point where the orbital speed is \(v\), the simplest impulsive plane change delta V is
\[\Delta v = 2v\sin\left(\frac{\Delta i}{2}\right)\]
Example: Suppose a spacecraft is at a high-altitude apogee with \(v = 1.5,\text{km/s}\) and you need \(\Delta i = 10^\circ\). Then
\[\Delta v = 2(1.5)\sin(5^\circ) \approx 3.0(0.0872) \approx 0.262,\text{km/s}\]
That number is why plane changes are often scheduled near apogee: the speed is lower, so the same angular rotation costs less delta V.
Combined Plane Change and Energy Change
Sometimes you want both a new plane and a new orbit size. A combined maneuver can be computed by targeting the full post-burn velocity vector rather than splitting it into separate steps. The method is consistent: determine \(\mathbf{v}^+\) for the desired orbit at the burn location, then subtract \(\mathbf{v}^-\).
A practical workflow is:
- Convert the desired target orbit elements into a state \(\mathbf{v}_\text{target}\) at the burn epoch.
- Compute \(\Delta\mathbf{v} = \mathbf{v}*\text{target} - \mathbf{v}*\text{current}\).
- If you only know the target’s direction change, you can still use vector geometry to compute the required magnitude.
Energy View for Prograde and Retrograde Burns
For a two-body orbit, the specific mechanical energy is \(\epsilon = v^2/2 - \mu/r\). A tangential impulsive burn changes \(v\) and therefore \(\epsilon\), which changes the semi-major axis \(a\). If you burn tangentially at radius \(r\), you can compute the required delta V using the vis-viva relation for the initial and target orbits.
Example: At radius \(r = 7000,\text{km}\), let \(\mu = 398600,\text{km}^3/\text{s}^2\). Suppose you want to raise the orbit from \(a_1 = 6800,\text{km}\) to \(a_2 = 7200,\text{km}\) with a prograde tangential burn.
Compute speeds from vis-viva: \[v_1 = \sqrt{\mu\left(\frac{2}{r}-\frac{1}{a_1}\right)}\quad\text{and}\quad v_2 = \sqrt{\mu\left(\frac{2}{r}-\frac{1}{a_2}\right)}\] Then \(\Delta v = v_2 - v_1\) for a prograde burn.
This approach is fast and reduces mistakes: if \(v_2 < v_1\) you’ve accidentally asked for a retrograde burn.
Implementation Checklist for Reliable Delta V Numbers
- Use consistent units for \(\mu\), \(r\), and \(v\).
- Ensure the burn epoch corresponds to the same \(\mathbf{r}\) used to compute \(\mathbf{v}^-\).
- Decide whether you’re modeling a pure tangential burn, pure plane change, or a full vector target.
- After computing \(\Delta\mathbf{v}\), recompute the resulting orbit elements from \(\mathbf{r}^+\) and \(\mathbf{v}^+\) to confirm the intended perigee/apogee and inclination.
Minimal Worked Vector Example
If at the burn you have \(\mathbf{v}^- = [7.60,\ 0.20,\ 0.00],\text{km/s}\) and you want \(\mathbf{v}^+ = [7.10,\ 0.60,\ 0.30],\text{km/s}\), then
\[\Delta\mathbf{v} = [-0.50,\ 0.40,\ 0.30],\text{km/s}\] \[\Delta v = \sqrt{(-0.50)^2 + 0.40^2 + 0.30^2} \approx 0.707,\text{km/s}\]
That single subtraction encodes both magnitude and direction, which is exactly what impulsive maneuver planning needs.
6.2 Finite Burn Modeling With Time Varying Acceleration
Finite burns replace the ideal “instantaneous delta-v” with an acceleration history over a burn interval. The key modeling choice is how you represent thrust magnitude and direction as functions of time, then integrate the resulting equations of motion. This section builds from the basics of thrust-to-acceleration mapping to practical numerical steps and verification checks.
Core Idea from Delta-V to Acceleration History
A delta-v maneuver assumes acceleration is infinite over zero time, so the state update is simply a velocity jump. For a finite burn, you instead apply a continuous acceleration \(\mathbf{a}(t)\) over \([t_0,t_f]\). The state update becomes an integral effect on both velocity and position:
- Velocity change: \(\Delta\mathbf{v} = \int_{t_0}^{t_f} \mathbf{a}(t),dt\)
- Position change: \(\Delta\mathbf{r} = \int_{t_0}^{t_f} \mathbf{v}(t),dt\), where \(\mathbf{v}(t)\) is affected by \(\mathbf{a}(t)\)
A good finite-burn model is consistent with the spacecraft mass evolution and with how thrust direction is defined in inertial or body-related frames.
Thrust to Acceleration with Mass Variation
Thrust \(T\) produces a force \(\mathbf{F}=T,\hat{\mathbf{u}}\), where \(\hat{\mathbf{u}}\) is the thrust unit vector. Acceleration is \(\mathbf{a}=\mathbf{F}/m\):
\[\mathbf{a}(t)=\frac{T(t)}{m(t)},\hat{\mathbf{u}}(t)\]
If you include propellant consumption, a common model is \(\dot{m}=-T/(I_{sp}g_0)\). That makes \(m(t)\) decrease during the burn, which slightly increases acceleration late in the maneuver.
Time Varying Acceleration Models
You can represent time variation in two independent ways: magnitude \(T(t)\) and direction \(\hat{\mathbf{u}}(t)\).
- Piecewise constant thrust: assume \(T\) and \(\hat{\mathbf{u}}\) are constant over small sub-intervals. This is easy to implement and matches many guidance command structures.
- Ramp or throttle profile: model \(T(t)\) with a linear ramp or a polynomial to represent spool-up and throttle settling.
- Attitude-driven direction: if thrust points along a body axis, then \(\hat{\mathbf{u}}(t)\) comes from attitude dynamics or from a commanded attitude law.
The practical rule: choose the simplest model that reproduces the required \(\Delta\mathbf{v}\) and the expected pointing behavior over the burn duration.
Mind Map: Finite Burn Modeling
Equations of Motion with Burn Acceleration
In an inertial frame, the translational dynamics are typically written as:
\[\dot{\mathbf{r}}=\mathbf{v}\] \[\dot{\mathbf{v}}=\mathbf{a}_{grav}(\mathbf{r},t)+\mathbf{a}_{thrust}(t)\]
Here \(\mathbf{a}_{grav}\) can be as simple as two-body gravity or as detailed as a higher-fidelity gravity model plus drag and other perturbations. The finite burn term is added only during \([t_0,t_f]\), and set to zero outside that interval.
Numerical Integration Strategy That Doesn’t Bite Back
A common mistake is to use a step size so large that the burn acceleration changes within a step. Best practice is to align integration step control with burn boundaries and with thrust profile breakpoints.
- Ensure the integrator takes steps that land exactly at \(t_0\) and \(t_f\).
- If you use piecewise constant thrust, set sub-interval boundaries and let the integrator step at those times.
- If you use a continuous profile, keep step size small enough that \(T(t)\) and \(\hat{\mathbf{u}}(t)\) do not vary drastically within one step.
A quick diagnostic is to compute \(\Delta\mathbf{v}*{int}=\int \mathbf{a}*{thrust}(t)dt\) from the same numerical solution and compare it to the expected command-level \(\Delta\mathbf{v}\).
Example Piecewise Constant Thrust with Attitude Pointing
Assume a spacecraft performs a 60 s prograde burn in an inertial frame where the thrust direction is commanded to remain aligned with the instantaneous velocity direction. For modeling, you update \(\hat{\mathbf{u}}\) at each integration step using the current \(\mathbf{v}(t)\):
\[\hat{\mathbf{u}}(t)=\frac{\mathbf{v}(t)}{|\mathbf{v}(t)|}\]
Let thrust magnitude be constant \(T\), and include mass change with \(\dot{m}=-T/(I_{sp}g_0)\). You then integrate the coupled system for \(\mathbf{r},\mathbf{v},m\) over \([t_0,t_f]\). After the burn, compute \(\Delta\mathbf{v}_{int}\) and verify it matches the intended magnitude within tolerance.
Example Throttle Ramp with Fixed Direction
Now assume thrust direction is fixed in the inertial frame, but magnitude ramps linearly:
\[T(t)=T_{max}\frac{t-t_0}{\tau}\quad \text{for } t_0\le t\le t_0+\tau\] \[T(t)=T_{max}\quad \text{for } t_0+\tau< t\le t_f\]
If you neglect mass change for simplicity, the expected delta-v magnitude is approximately the area under \(T(t)/m\) times the direction unit vector. This gives a clean check: the integrated \(\Delta\mathbf{v}\) from the numerical propagation should match the analytic area result.
Common Best Practices Checklist
- Use a burn indicator function so thrust is exactly zero outside \([t_0,t_f]\).
- Keep frame definitions explicit: thrust direction must be expressed in the same frame as the equations of motion.
- Validate by comparing integrated \(\Delta\mathbf{v}\) to the command target.
- Test sensitivity to step size around burn boundaries.
Summary of What to Model and What to Verify
A finite burn model is fundamentally an acceleration history problem: define \(T(t)\), define \(\hat{\mathbf{u}}(t)\), decide whether \(m(t)\) changes, then integrate the coupled dynamics. The two verification anchors are (1) the integral delta-v produced by the thrust model and (2) numerical stability with respect to burn timing and profile breakpoints.
6.3 Coordinate Frames for Thrust Direction and Attitude Coupling
Thrust modeling is where orbital mechanics meets the spacecraft’s attitude reality. The key idea is simple: the thrust acceleration vector is defined in a frame tied to the vehicle and its actuators, then rotated into the inertial or navigation frame used by the orbit propagator. If you get the frame chain wrong, your delta-v will still “work” numerically, but it will point somewhere else.
Coordinate Frames You Actually Need
Start with three frames and keep them distinct.
- Inertial or Navigation Frame: where the equations of motion are integrated (often Earth-centered inertial or a local navigation frame).
- Body Frame: fixed to the spacecraft structure; angular rates and attitude dynamics live here.
- Thrust Frame: fixed to the propulsion system; its axes define the thrust direction and any gimbal or nozzle misalignment.
A practical best practice is to write down the direction of each thrust axis in the body frame as a constant unit vector (or a function of gimbal angles). That turns “direction” into a concrete object you can test.
Frame Chain and Rotation Conventions
Use a consistent rotation convention end-to-end. For example, if you represent attitude as a rotation matrix \(\mathbf{C}_{B\leftarrow N}\) that maps a vector from navigation to body, then the thrust acceleration in navigation is
\[\mathbf{a}_N = \mathbf{C}_{N\leftarrow B},\mathbf{a}_B\]
where \(\mathbf{C}*{N\leftarrow B} = \mathbf{C}*{B\leftarrow N}^T\) if the matrix is orthonormal.
A systematic workflow:
- Define thrust direction in the thrust frame.
- Rotate thrust direction into body frame using the thrust-to-body alignment (and gimbal angles if present).
- Rotate body-frame thrust acceleration into navigation frame using the current attitude.
Thrust Direction with Attitude and Gimbals
If the engine is rigidly mounted, the thrust unit vector in body coordinates is constant: \(\hat{\mathbf{u}}_B\). With a gimbaled nozzle, \(\hat{\mathbf{u}}_B\) becomes time-varying because the gimbal angles change.
A clean modeling pattern is:
- Compute \(\hat{\mathbf{u}}_T\) in thrust frame (usually a fixed axis).
- Apply a thrust-to-body rotation \(\mathbf{C}_{B\leftarrow T}(\delta)\) to get \(\hat{\mathbf{u}}_B\).
- Multiply by thrust magnitude \(T\) and divide by mass \(m\): \(\mathbf{a}_B = (T/m),\hat{\mathbf{u}}_B\).
Then rotate \(\mathbf{a}_B\) into navigation using the attitude matrix.
Coupling with Attitude Dynamics
Thrust does not just “point”; it can torque the spacecraft. The coupling enters through the moment equation:
\[\mathbf{I},\dot{\boldsymbol{\omega}} = \mathbf{M}_{\text{thrust}} + \mathbf{M}_{\text{other}} - \boldsymbol{\omega}\times(\mathbf{I}\boldsymbol{\omega})\]
where \(\mathbf{M}*{\text{thrust}}\) depends on the thrust line of action and the lever arm from the center of mass. If the thrust frame is offset from the center of mass by \(\mathbf{r}*{\text{cp}}\) in body coordinates, then
\[\mathbf{M}_{\text{thrust}} = \mathbf{r}_{\text{cp}} \times \mathbf{F}_B\]
with \(\mathbf{F}_B = T,\hat{\mathbf{u}}_B\).
A best practice is to compute both \(\mathbf{a}*B\) and \(\mathbf{M}*{\text{thrust}}\) from the same \(\hat{\mathbf{u}}_B\). That prevents the common bug where the force uses one alignment and the torque uses another.
Mind Map: Coordinate Frames for Thrust Direction and Attitude Coupling
Example Rigid Mount with a Misalignment Angle
Assume the nozzle is intended to thrust along body \(+Z\), but it is misaligned by \(\alpha\) toward body \(+X\). In thrust frame, \(\hat{\mathbf{u}}_T = [0,0,1]^T\). The thrust-to-body rotation can be represented as a small rotation about body \(+Y\). Then
- \(\hat{\mathbf{u}}_B \approx [\sin\alpha, 0, \cos\alpha]^T\)
- \(\mathbf{a}_B = (T/m),[\sin\alpha, 0, \cos\alpha]^T\)
If your attitude matrix at a given time maps body to navigation, you rotate \(\mathbf{a}_B\) into navigation and integrate. A quick sanity check: when \(\alpha=0\), the acceleration must lie exactly along the rotated body \(+Z\) axis.
Example Gimbaled Nozzle with Torque Verification
Let the nozzle gimbal angles be \(\delta_x\) and \(\delta_y\) defined as rotations about thrust-frame axes. Compute \(\mathbf{C}_{B\leftarrow T}(\delta_x,\delta_y)\), then \(\hat{\mathbf{u}}_B\). Use the same \(\hat{\mathbf{u}}_B\) to form both:
- \(\mathbf{a}_B = (T/m)\hat{\mathbf{u}}_B\)
- \(\mathbf{M}*{\text{thrust}} = \mathbf{r}*{\text{cp}}\times (T\hat{\mathbf{u}}_B)\)
If \(\mathbf{r}_{\text{cp}}\) is zero (thrust line passes through the center of mass), the torque must be exactly zero for any gimbal angles. That single check catches many sign and axis mistakes.
Practical Consistency Checks
Before trusting a full propagation, verify:
- Rotation matrices are orthonormal: \(\mathbf{C}^T\mathbf{C}=\mathbf{I}\).
- The thrust axis in body coordinates matches the expected direction at zero gimbal.
- Force and torque use the same thrust direction vector.
- Units are consistent: \(T\) in newtons, \(m\) in kilograms, giving \(\mathbf{a}\) in m/s\(^2\).
With these in place, the thrust model becomes a reliable bridge between attitude states and the orbit dynamics you care about.
6.4 Maneuver Planning Using Targeting and Sensitivity Concepts
Maneuver planning is the art of choosing control inputs so the spacecraft state at a future time matches what you need. In practice, you rarely know the exact mapping from burn parameters to final orbit, so you plan with a model, then correct using targeting and sensitivity.
Core Idea of Targeting
Targeting turns “reach a goal” into “solve for control parameters.” A common goal is a desired state at a target epoch, such as position and velocity in an inertial frame. You define:
- Decision variables: burn timing, duration, thrust direction parameters, or impulsive delta-v components.
- Target function: the difference between achieved and desired state.
- Constraints: limits on delta-v, thrust magnitude, keep-out zones, or maximum burn duration.
A practical habit: start with a simplified model (two-body plus one perturbation) to get a reasonable first guess, then add realism once the targeting logic works.
Sensitivity as the Local Map
Sensitivity describes how small changes in decision variables affect the target function. Near a current guess, you approximate the relationship as linear:
- Let x be the decision vector.
- Let g(x) be the target mismatch (zero means success).
- Use a first-order update: \(x_{k+1} = x_k - J^{-1} g(x_k)\), where J is the Jacobian of g with respect to x.
You can compute J in two main ways:
- Analytical or semi-analytical derivatives using variational equations.
- Numerical finite differences by perturbing x and re-propagating.
Finite differences are often the quickest to implement and debug, especially when you already have a propagator. The tradeoff is computational cost and sensitivity to step size.
Mind Map: Maneuver Planning Using Targeting and Sensitivity Concepts
Practical Example Impulsive Targeting for a Plane Change
Suppose you want to change inclination by a small amount while keeping the semi-major axis roughly constant. A simple impulsive model uses delta-v at a chosen point in the orbit.
- Decision variables: \(x = [\Delta v, \theta]\), where \(\Delta v\) is the magnitude of the burn and \(\theta\) is the direction angle in the local orbital frame.
- Target function: mismatch in inclination and right ascension of the ascending node at the target epoch.
- Sensitivity computation: finite difference by trying \(\Delta v\pm \epsilon\) and \(\theta\pm \epsilon\), then re-propagating.
A useful detail: scale the decision variables so the Jacobian columns have comparable magnitudes. If \(\Delta v\) is in m/s and \(\theta\) is in radians, the raw Jacobian can be ill-conditioned, and the solver will “prefer” changing the larger-scaled variable.
Practical Example Finite Burn Targeting with Damped Updates
Now consider a finite burn where thrust direction is parameterized by a constant inertial pointing angle pair \([\alpha, \beta]\) over the burn. The decision vector might be:
- \(x = [t_{start}, t_{end}, \alpha, \beta]\)
Because the mapping can be nonlinear, use a damped correction:
- Compute \(\Delta x\) from the linearized system.
- Apply \(x_{k+1} = x_k + \lambda \Delta x\) with \(0<\lambda\le 1\).
This prevents overshooting when the linear approximation is only locally valid. A simple convergence rule is to stop when both the mismatch norm decreases below a threshold and the correction magnitude becomes small.
Constraint Handling That Doesn’t Break Everything
Constraints can be enforced in three common ways:
- Hard bounds: clamp decision variables (e.g., burn duration limits) after each update.
- Penalty terms: augment the target function with weighted constraint violations.
- Reduced parameterization: choose decision variables that automatically satisfy constraints (e.g., normalize thrust direction).
For delta-v budgets, penalty terms are usually smoother than hard rejection, because they guide the solver toward feasible solutions.
Common Failure Modes and Fixes
- No convergence: increase damping, improve initial guess, or reduce model complexity.
- Oscillating residuals: re-scale variables and weights in the mismatch metric.
- Sensitivity noise: adjust finite difference step sizes and ensure consistent propagation settings.
Minimal Implementation Sketch
Given: initial state, goal state, decision vector x0
Loop k = 0..N
Propagate with xk to get achieved state
Compute mismatch g(xk)
If ||g|| small: stop
Compute Jacobian J
- finite differences or variational equations
Solve for correction Δx using damped least squares
Update xk+1 = xk + λ Δx
Enforce bounds or penalties
End
Re-propagate with final x and report residuals
Integrated Takeaway
Targeting provides the “what,” sensitivity provides the “how to adjust,” and the solver ties them together. When you keep the model consistent, scale variables sensibly, and validate with a final propagation, the planning loop becomes predictable rather than mysterious—like steering with a map instead of guessing with vibes.
6.5 Practical Example Designing a Hohmann Transfer and Verifying Results
A Hohmann transfer is the simplest two-impulse maneuver that moves a spacecraft between two coplanar circular orbits. The key idea is to use an elliptical transfer orbit whose periapsis matches the initial orbit radius and whose apoapsis matches the target orbit radius. Then you apply one burn at periapsis to enter the transfer, and a second burn at apoapsis to circularize at the target.
Mind Map: Hohmann Transfer Design
Step 1: Define the Problem and Inputs
Assume Earth-centered motion with gravitational parameter \(\mu = 398600,\text{km}^3/\text{s}^2\). Let the initial circular orbit be at \(r_1 = 7000,\text{km}\) and the target circular orbit at \(r_2 = 8000,\text{km}\). Both orbits are coplanar, so the maneuver is planar and the velocity changes are tangential.
The circular orbital speeds are \[ v_{C1} = \sqrt{\mu/r_1},\quad v_{C2} = \sqrt{\mu/r_2}. \] Numerically, \[ v_{C1} \approx \sqrt{398600/7000} \approx 7.546,\text{km/s},\quad v_{C2} \approx \sqrt{398600/8000} \approx 7.059,\text{km/s}. \]
Step 2: Build the Transfer Orbit
For a Hohmann transfer, the transfer ellipse has periapsis at \(r_1\) and apoapsis at \(r_2\). Its semi-major axis is \[ a_T = \frac{r_1 + r_2}{2} = 7500,\text{km}. \] The transfer speeds at periapsis and apoapsis follow from the vis-viva equation: \[ v_P = \sqrt{\mu\left(\frac{2}{r_1} - \frac{1}{a_T}\right)},\quad v_A = \sqrt{\mu\left(\frac{2}{r_2} - \frac{1}{a_T}\right)}. \] Compute: \[ v_P \approx \sqrt{398600\left(\frac{2}{7000}-\frac{1}{7500}\right)} \approx 7.794,\text{km/s}, \] \[ v_A \approx \sqrt{398600\left(\frac{2}{8000}-\frac{1}{7500}\right)} \approx 6.830,\text{km/s}. \]
Step 3: Compute the Two Impulses
At periapsis, you change from the initial circular speed \(v_{C1}\) to the transfer periapsis speed \(v_P\): \[ \Delta v_1 = v_P - v_{C1} \approx 7.794 - 7.546 = 0.248,\text{km/s}. \] At apoapsis, you change from the transfer apoapsis speed \(v_A\) to the target circular speed \(v_{C2}\): \[ \Delta v_2 = v_{C2} - v_A \approx 7.059 - 6.830 = 0.229,\text{km/s}. \] Total \(\Delta v\) is about \(0.477,\text{km/s}\). The transfer time is half the period of the transfer ellipse: \[ t_T = \pi\sqrt{\frac{a_T^3}{\mu}}. \] With \(a_T=7500,\text{km}\), this gives \(t_T \approx 2.77,\text{hours}\).
Step 4: Verify Results by Propagation and Residuals
A good verification checks more than the \(\Delta v\) arithmetic. You want to confirm that the maneuver places the spacecraft on the intended transfer ellipse and then circularizes at the target radius.
Use an inertial frame (e.g., Earth-centered inertial) and assume instantaneous tangential burns. Start with the initial circular state at periapsis of the transfer ellipse. Apply \(\Delta v_1\) in the direction of motion to obtain the transfer state. Propagate for \(t_T\). At apoapsis, apply \(\Delta v_2\) tangentially to circularize.
Verification metrics:
- Radius residual at final time: \(|\mathbf{r}(t_f)| - r_2\)
- Speed residual: \(|\mathbf{v}(t_f)| - v_{C2}\)
- Specific energy consistency: \(\epsilon = |\mathbf{v}|^2/2 - \mu/|\mathbf{r}|\) should match the target circular energy \(-\mu/(2r_2)\)
- Angular momentum direction: for coplanar motion, \(\mathbf{h}\) should remain aligned with the initial orbit normal
Example Verification Mind Map
Step 5: Practical Notes That Prevent Common Mistakes
- Burn direction sign: For an outward transfer (\(r_2>r_1\)), \(\Delta v_1\) is positive along the velocity direction, while \(\Delta v_2\) is also applied along the velocity direction but represents a reduction in speed relative to the transfer apoapsis speed.
- True anomaly alignment: If you start the initial state at a different orbital phase, you must shift the burn locations to match periapsis and apoapsis of the transfer ellipse.
- Units discipline: Mixing meters and kilometers is the fastest way to get a “perfect” answer that is perfectly wrong.
When the residuals are small, the computed \(\Delta v\) values and the transfer time are consistent with the underlying two-body model. That’s the whole point of the verification: the numbers agree with the dynamics, not just with the equations on paper.
7. Orbit Determination from Measurements
7.1 Measurement Models for Range Doppler and Angles
Space navigation lives or dies by measurement models: equations that map a spacecraft state to what sensors report. A good model is consistent about frames, time tags, and sign conventions, and it makes it clear what is measured versus what is inferred.
Measurement Geometry and Core Quantities
Start with a simple picture. Let the spacecraft position in an inertial frame be \(\mathbf{r}_s(t)\) and the receiver position be \(\mathbf{r}_r(t)\). For a one-way link, the signal leaves the spacecraft at transmit time \(t_t\) and arrives at the receiver at receive time \(t_r\). The light-time \(\tau\) satisfies \[ |\mathbf{r}_r(t_r)-\mathbf{r}_s(t_t)| = c,(t_r-t_t) = c\tau. \] Define the line-of-sight vector at reception \[ \mathbf{\rho}(t_r)=\mathbf{r}_r(t_r)-\mathbf{r}_s(t_t),\quad \hat{\mathbf{u}}=\frac{\mathbf{\rho}}{|\mathbf{\rho}|}. \] This \(\hat{\mathbf{u}}\) is the direction that turns position and velocity into range and Doppler.
Range Model
For most navigation problems, the measured range is modeled as \[ \rho_{meas}=|\mathbf{\rho}| + b_\rho + \epsilon_\rho, \] where \(b_\rho\) is a bias term (hardware delay, calibration offset) and \(\epsilon_\rho\) is noise. The key best practice is to keep the light-time consistent: if you compute \(\mathbf{r}_s(t_t)\) using \(t_t=t_r-\tau\), then range is consistent with Doppler and angles.
Example: If a receiver at \(\mathbf{r}_r\) measures a range of 20,200 km to a spacecraft, the model predicts \(|\mathbf{r}_r-\mathbf{r}_s(t_t)|\). If you instead use \(\mathbf{r}_s(t_r)\) without light-time, the residual can look like a systematic error that the filter tries to “explain” with wrong state updates.
Doppler Model
Doppler is the time rate of change of the range, projected along the line of sight. A common model for two-way coherent links includes turnaround ratios, but the core one-way relationship is \[ \dot{\rho} = \frac{d}{dt_r}|\mathbf{\rho}| \approx -\hat{\mathbf{u}}\cdot \mathbf{v}_{rel}, \] with \(\mathbf{v}_{rel}=\mathbf{v}_s(t_t)-\mathbf{v}_r(t_r)\) and the sign chosen to match the sensor convention. The measured Doppler is \[ D_{meas}=K,\dot{\rho} + b_D + \epsilon_D, \] where \(K\) maps range-rate to frequency units (depends on carrier frequency and whether the link is one-way or two-way).
Example: If the spacecraft is moving directly away from the receiver, \(\hat{\mathbf{u}}\cdot \mathbf{v}_{rel}\) is positive, so \(\dot{\rho}\) is negative under the definition above. That sign must match the receiver’s “positive Doppler” definition; otherwise, you get residuals that flip direction every pass.
Angle Model
Angles come from the direction to the spacecraft. Define the unit line-of-sight vector \(\hat{\mathbf{u}}\) in the receiver’s local frame (often topocentric: east-north-up). If the sensor reports azimuth \(A\) and elevation \(E\), a typical model is \[ A_{meas}=A(\hat{\mathbf{u}})+b_A+\epsilon_A,\quad E_{meas}=E(\hat{\mathbf{u}})+b_E+\epsilon_E. \] The best practice is to compute \(\hat{\mathbf{u}}\) in the same frame used by the angle measurement, including Earth rotation and any antenna mounting offsets.
Example: If you compute \(\hat{\mathbf{u}}\) in an inertial frame and then feed it directly into azimuth/elevation formulas that assume a local topocentric frame, the angles may still “look plausible” for short arcs but will bias the orbit solution.
Linearization for Estimation
Orbit determination typically uses a linearized measurement model around a predicted state \(\mathbf{x}*0\): \[ \mathbf{y} \approx h(\mathbf{x}_0)+\mathbf{H},\Delta\mathbf{x}+\mathbf{v}. \] Here \(\mathbf{H}=\partial h/\partial \mathbf{x}\) is the sensitivity matrix. For range and Doppler, sensitivities are dominated by how \(\hat{\mathbf{u}}\) changes with position and how \(\mathbf{v}*{rel}\) projects along \(\hat{\mathbf{u}}\). For angles, sensitivities depend strongly on geometry: when the spacecraft is near zenith, azimuth becomes less informative.
Mind Map: Measurement Modeling
Measurement Models Mind Map
Practical Example: Building a Single Observation Set
Assume you have one tracking pass with three measurements at the same receive time \(t_r\): range, Doppler, and elevation. Compute \(t_t\) using light-time, evaluate \(\mathbf{r}_s(t_t)\) and \(\mathbf{v}_s(t_t)\), then form \(\mathbf{\rho}\) and \(\hat{\mathbf{u}}\). Range follows from \(|\mathbf{\rho}|\). Doppler follows from the projection of relative velocity along \(\hat{\mathbf{u}}\), scaled by \(K\) and adjusted by bias. Elevation follows from the local-frame direction of \(\hat{\mathbf{u}}\). Finally, stack the three residuals into one vector so the estimator can weight them appropriately.
The unglamorous but crucial takeaway: range, Doppler, and angles are not separate problems. They share the same geometry and time-of-flight assumptions, so the measurement model should be built as one coherent mapping from state to sensor outputs.
7.2 Observation Equations and Linearization Strategies
Observation equations map a spacecraft state to what a sensor measures. In orbit determination, you rarely measure the full state directly; you measure something like range, range rate, angles, or Doppler. The key idea is to write each measurement as a function of the unknown state plus noise, then linearize that function so you can solve for state updates.
Observation Models from Physics to Math
Start with a measurement type and a clear geometry.
- Range: distance between a ground station and the spacecraft at the signal transmit/receive times.
- Doppler or Range Rate: projection of relative velocity along the line of sight, often with light-time effects.
- Angles: direction of the incoming signal in an instrument frame, which depends on the spacecraft position and the station attitude and calibration.
A generic observation model looks like:
\[ z = h(x) + \epsilon \]
where x is the state (position and velocity, or an extended state including clock parameters), h(x) is the deterministic prediction, and \epsilon is measurement noise.
A practical best practice is to keep time tags consistent. If the measurement is based on signal travel time, the station-to-spacecraft geometry must be evaluated at the correct transmit time, not at the receive time. That choice changes the functional form of h(x).
Linearization Around a Reference State
Orbit determination typically uses an iterative scheme. You start with a reference state \(x_0\) and compute predicted measurements \(\hat{z}=h(x_0)\). The residual is \(r=z-\hat{z}\). To relate residuals to state corrections \(\Delta x\), linearize:
\[ h(x_0+\Delta x) \approx h(x_0) + H,\Delta x \]
where \(H\) is the Jacobian matrix \(H=\partial h/\partial x\) evaluated at \(x_0\). Substituting into the observation equation gives:
\[ r \approx H,\Delta x + \epsilon \]
This is the workhorse equation for least squares and filtering. If the linearization is poor, the residuals won’t shrink and the update may oscillate.
Jacobians and Their Structure
Jacobian computation can be done in several ways, but the structure matters more than the method.
- Analytical Jacobians: faster and more accurate when derived carefully.
- Finite differences: easy to implement but sensitive to step sizes and numerical noise.
- Automatic differentiation: reduces algebra mistakes but still requires correct model wiring.
A systematic approach is to build Jacobians in blocks that mirror the model:
- Geometry block: how line-of-sight vectors change with position.
- Kinematics block: how relative velocity changes with velocity.
- Time and light-time block: how transmit time depends on position.
- Clock block: how station and spacecraft clock parameters affect timing and Doppler.
This block thinking prevents the common error of differentiating only the obvious part of the measurement while ignoring the time-tag dependence.
Mind Map: Linearization Workflow
Worked Example Range with Light-Time
Assume a simplified two-body geometry where the measurement is range from a station at position \(s\) to a spacecraft at position \(r\). Let the predicted range be:
\[ \hat{\rho} = | r - s | \]
and the measurement be \(z_\rho = \rho + \epsilon\). The residual is \(r_\rho = z_\rho - \hat{\rho}\).
Let \(\Delta r\) be the position correction. The linearized change in range is:
\[ \Delta \rho \approx \hat{u}^T \Delta r \]
where \(\hat{u} = (r-s)/|r-s|\) is the unit line-of-sight vector. In Jacobian form, the range Jacobian with respect to position is:
\[ H_\rho = \partial \hat{\rho}/\partial r = \hat{u}^T \]
and the derivative with respect to velocity is zero in this simplified model.
Now add light-time: the spacecraft position used in \(h(x)\) corresponds to the transmit time \(t_t\), which depends on range itself. Then \(H_\rho\) gains additional terms because changing position changes the transmit time, which changes the propagated spacecraft position. A practical strategy is to compute \(H\) by differentiating the full chain used in the prediction, not by differentiating only \(|r-s|\).
Linearization Quality Checks
After solving for \(\Delta x\), recompute predicted measurements and verify that residuals decrease in a weighted sense. If they don’t, typical causes include:
- Linearization point too far from the truth.
- Missing dependencies in \(H\), especially time-tag and coordinate transforms.
- Inconsistent units between state, Earth model, and measurement model.
- Step sizes in finite differences that are too large or too small.
A small, concrete habit helps: log the norm of the weighted residuals before and after each iteration. You want a consistent downward trend, not perfection.
Example Linearization for Range Rate
For Doppler-like measurements, a common simplified model is:
\[ \hat{\dot{\rho}} = \hat{u}^T (v - \dot{s}) \]
where \(v\) is spacecraft velocity and \(\dot{s}\) is station velocity in the same frame. The Jacobian with respect to velocity includes \(\hat{u}^T\). The Jacobian with respect to position includes terms from \(\hat{u}\) changing with geometry. That means position and velocity are coupled even when the formula looks like a simple projection.
This coupling is exactly why linearization is not optional: without the Jacobian terms from \(\hat{u}(r)\), the solver will update the wrong directions in state space.
7.3 Least Squares Estimation and Normal Equations
Least squares estimation turns “we have measurements” into “we have the best state parameters” by choosing the unknowns that make the measurement residuals as small as possible in a weighted sense. In orbit determination, the unknowns are typically the initial state (position and velocity) and sometimes additional parameters like drag scale or clock bias.
Mind Map: Least Squares Estimation Workflow
From Measurement Equations to Residuals
Assume you have a measurement vector y (e.g., range and range-rate samples). Your dynamics and observation model predict what the measurements should be for a given parameter vector x:
- Predicted measurements: ŷ = h(x)
- Residuals: r(x) = y − h(x)
If the model were perfect, residuals would be zero. In reality, residuals contain measurement noise and model mismatch. Least squares chooses x to reduce residual magnitude.
Why Weighting Matters
If measurement errors have covariance R, a standard choice is W = R⁻¹. This prevents a noisy measurement type (say, angles with larger uncertainty) from dominating the solution just because it has more numerical influence.
Linearization Around a Current Guess
Orbit determination is usually nonlinear: h(x) depends on propagation, coordinate transforms, and sometimes light-time. Least squares handles this by iterating.
Start with a current guess x₀ and consider a small correction dx. Linearize:
- h(x₀ + dx) ≈ h(x₀) + H dx
- H = ∂h/∂x evaluated at x₀
Then the residual becomes:
- r(x₀ + dx) = y − h(x₀ + dx) ≈ (y − h(x₀)) − H dx
- Define r₀ = y − h(x₀) so r ≈ r₀ − H dx
The Least Squares Objective Function
Weighted least squares minimizes:
- J(dx) = (r₀ − H dx)ᵀ W (r₀ − H dx)
When W = I, this is the familiar “sum of squared residuals.” When W = R⁻¹, it becomes “sum of squared residuals measured in units of expected noise.”
Deriving the Normal Equations
To minimize J(dx), set the gradient with respect to dx to zero. Expanding and collecting terms gives:
- (Hᵀ W H) dx = Hᵀ W r₀
The matrix N = Hᵀ W H is called the normal matrix. The right-hand side b = Hᵀ W r₀ is the normal vector. Solving N dx = b yields the correction that best reduces the residuals under the linearized model.
Mind Map: Normal Equations Anatomy
A Concrete Example with Small Dimensions
Suppose you estimate a 2D parameter vector x = [x1, x2]ᵀ from two scalar measurements. Your linearized model is:
- ŷ ≈ h(x₀) + H dx
- Let H = [[1, 2], [0, 1]]
- Let residual at the current guess be r₀ = [3, -1]ᵀ
- Assume equal noise so W = I
Compute:
- N = Hᵀ H = [[1, 2], [2, 5]]
- b = Hᵀ r₀ = [1*3 + 0*(-1), 2*3 + 1*(-1)]ᵀ = [3, 5]ᵀ
Solve:
- [[1, 2], [2, 5]] dx = [3, 5]
From the first row: dx1 + 2 dx2 = 3. From the second: 2 dx1 + 5 dx2 = 5. Substitute dx1 = 3 − 2 dx2 into the second:
- 2(3 − 2 dx2) + 5 dx2 = 5 → 6 − 4 dx2 + 5 dx2 = 5 → dx2 = -1
- Then dx1 = 3 − 2(-1) = 5
So the update is dx = [5, -1]ᵀ. In a real orbit problem, you’d repeat this with a larger H built from partial derivatives of range and angles with respect to the state.
Practical Notes That Prevent Headaches
- Iteration control: After applying dx, recompute residuals using the full nonlinear model. If residuals shrink, continue; if not, reduce step size or revisit the linearization point.
- Conditioning and scaling: If state components have very different magnitudes (meters vs. meters/second), scale variables so N is numerically well-behaved.
- Solving without explicit inversion: Use a stable linear solver for N dx = b rather than computing N⁻¹.
Mind Map: From Residuals to Updated State
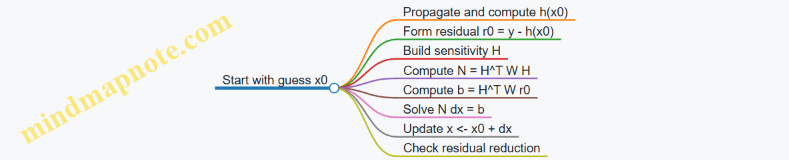
Least squares and the normal equations are the engine behind many orbit determination pipelines: they convert measurement geometry and model sensitivity into a correction step that is mathematically consistent and easy to compute once H and W are in hand.
7.4 Covariance Propagation and Uncertainty Interpretation
Covariance propagation answers a simple question: if your initial orbit estimate is uncertain, how does that uncertainty evolve as you propagate the dynamics forward in time? The key idea is that uncertainty is not just “bigger or smaller.” It also rotates, stretches, and couples between state components (position, velocity, and any additional parameters).
Core Concepts and Notation
Let the state be \(x\in\mathbb{R}^n\) and the dynamics be \(\dot{x}=f(x,t)\). Suppose at time \(t_0\) you have an estimate \(\hat{x}_0\) with covariance \(P_0\). A propagated estimate at time \(t\) is \(\hat{x}(t)\), and the propagated covariance is \(P(t)\).
For small uncertainties, linearize the dynamics around the estimated trajectory. Define the state transition matrix \(\Phi(t,t_0)\) as the linear map that approximates how small perturbations in the initial state affect the state later:
\[\delta x(t) \approx \Phi(t,t_0),\delta x_0\]
Then covariance propagates as:
\[P(t)=\Phi(t,t_0),P_0,\Phi(t,t_0)^T\]
This is the backbone for interpreting uncertainty in orbit determination pipelines.
Mind Map: Covariance Propagation and Uncertainty Interpretation
Computing the State Transition Matrix
The state transition matrix satisfies:
\[\dot{\Phi}(t,t_0)=F(t),\Phi(t,t_0),\quad \Phi(t_0,t_0)=I\]
where \(F(t)=\left.\partial f/\partial x\right|_{\hat{x}(t)}\). In practice, you integrate \(\hat{x}(t)\) and \(\Phi(t,t_0)\) together. This keeps the linearization aligned with the same trajectory used for the estimate.
A practical best practice is to enforce symmetry after propagation: numerical integration can introduce tiny asymmetries, and you want \(P\approx P^T\). If you see large asymmetry, it’s usually a sign of integration issues or inconsistent Jacobians.
Example Interpreting Covariance Growth
Consider a simplified 2D state \(x=[r\ v]^T\) for a toy “radial position and radial velocity” model. Suppose at \(t_0\):
- \(P_0=\begin{bmatrix} 100 & 20 \ 20 & 4 \end{bmatrix}\)
The off-diagonal term means errors in \(r\) and \(v\) are correlated. After propagation, you might obtain:
- \(P(t)=\begin{bmatrix} 400 & 10 \ 10 & 9 \end{bmatrix}\)
Interpretation:
- The position variance increased from 100 to 400, so uncertainty in \(r\) grew.
- The correlation weakened because the covariance term dropped from 20 to 10.
- Velocity variance increased from 4 to 9, showing that the dynamics amplify uncertainty in \(v\) too.
This is why covariance propagation is more informative than tracking a single “error magnitude.” The shape of the uncertainty changes.
Uncertainty Interpretation Through Eigenstructure
To interpret \(P\), compute its eigenvalues and eigenvectors. Eigenvectors give principal directions of uncertainty; eigenvalues give the squared spread along those directions. If one eigenvalue dominates, your uncertainty is effectively one-dimensional in state space.
A useful orbit-specific habit is to look at how uncertainty projects onto physically meaningful subspaces. For instance, position uncertainty may be large along the along-track direction but smaller radially, which affects how measurements reduce uncertainty during updates.
Mapping State Covariance to Measurement Uncertainty
Measurements rarely observe the full state directly. If a measurement model is \(y=h(x,t)+\text{noise}\), linearize it around \(\hat{x}\):
\[H=\left.\partial h/\partial x\right|_{\hat{x}}\]
Then the predicted measurement covariance is:
\[S=H,P,H^T+R\]
where \(R\) is measurement noise covariance. This step is the bridge between “state uncertainty” and “what the sensor should see.”
A concrete example: if \(H\) mostly maps position components, then growing position covariance will inflate \(S\), which in turn changes the weighting of the measurement update. If \(S\) is too small relative to actual residuals, the filter will overreact.
Practical Best Practices and Diagnostics
- Integrate \(\Phi\) with the same model and time grid as the state. Mismatched Jacobians or time handling can silently corrupt \(P\).
- Check symmetry and positive semidefiniteness. Covariance should not gain large negative eigenvalues from numerical error.
- Use step-size sensitivity tests. If \(P\) changes drastically with small step adjustments, your linearization or integration tolerances are not adequate.
- Interpret correlations, not just variances. Two states can share the same position variance but behave differently because their cross-covariances differ.
Mind Map: Interpretation and Diagnostics
Covariance propagation is where the math stops being abstract and starts behaving like a practical instrument model. When you propagate \(P\) correctly, you get a quantitative expectation for how uncertain your orbit estimate should be at each time, and that expectation becomes the reference point for measurement updates.
7.5 Practical Example Estimating an Orbit From Simulated Tracking Data
This example walks through a complete, self-contained orbit determination workflow using simulated tracking data. The goal is to estimate an initial state vector from noisy measurements, then check whether the recovered orbit reproduces the measurements within expected uncertainty.
Problem Setup and Modeling Choices
Assume a spacecraft is in a near-Earth orbit and a single ground station tracks it over a short pass. We generate “truth” using a high-fidelity propagator, then create synthetic measurements by applying a measurement model and adding realistic noise.
Truth dynamics. Use a two-body model plus one perturbation term (for instance, Earth’s J2) so the orbit is not perfectly Keplerian. The truth state at the initial epoch is a position-velocity vector in an inertial frame.
Measurement types. Use range and range-rate (Doppler) because they are common and directly sensitive to radial motion. Let the station provide measurements at discrete times.
Time tags. Use a consistent time scale for propagation and measurement generation. If you need a concrete epoch, pick one like 2026-02-15T00:00:00Z for the simulation start.
Mind Map: Orbit Determination from Simulated Tracking Data
Step 1: Generate Synthetic Tracking Data
- Propagate the truth state from the initial epoch to each measurement time.
- Convert the spacecraft inertial state to the station line-of-sight geometry.
- Compute observables:
- Range: the Euclidean distance between station and spacecraft.
- Range-rate: the time derivative of range, computed from relative velocity projected onto the line of sight.
- Add noise. For example, use range noise with standard deviation \(\sigma_\rho\) and Doppler noise with \(\sigma_{\dot\rho}\). Keep the noise independent across measurement times for this example.
A practical detail: store the measurement vector \(\mathbf{y}\) and the corresponding predicted vector \(\hat{\mathbf{y}}(\mathbf{x})\), where \(\mathbf{x}\) is the estimated initial state.
Step 2: Choose the Estimation Unknowns
For a first pass, estimate only the initial inertial state \(\mathbf{x}_0 = [\mathbf{r}_0, \mathbf{v}_0]\). This keeps the example focused. In real systems you might also estimate station clock bias, measurement biases, or drag parameters, but those are separate modeling decisions.
Set an initial guess \(\mathbf{x}_0^{(0)}\) by perturbing the truth state with a plausible error, such as a few kilometers in position and a few meters per second in velocity.
Step 3: Form the Linearized Observation Model
At iteration \(k\), predict measurements from the current state guess: \[ \hat{\mathbf{y}}^{(k)} = \mathbf{h}(\mathbf{x}_0^{(k)}) \] Compute residuals: \[ \mathbf{r}^{(k)} = \mathbf{y} - \hat{\mathbf{y}}^{(k)} \] Linearize around \(\mathbf{x}_0^{(k)}\): \[ \mathbf{r}^{(k)} \approx \mathbf{H}^{(k)} \Delta \mathbf{x}_0 \] where \(\mathbf{H}^{(k)}\) is the sensitivity matrix (partial derivatives of measurements with respect to the initial state). In practice, you compute \(\mathbf{H}\) using either numerical differentiation or state transition matrices derived from variational equations.
Step 4: Solve the Weighted Least Squares Update
Use a weight matrix \(\mathbf{W}\) based on measurement noise covariance \(\mathbf{R}\): \(\mathbf{W}=\mathbf{R}^{-1}\). Then solve: \[ \Delta \mathbf{x}_0 = (\mathbf{H}^T \mathbf{W} \mathbf{H})^{-1} \mathbf{H}^T \mathbf{W} \mathbf{r} \] Update: \[ \mathbf{x}_0^{(k+1)} = \mathbf{x}_0^{(k)} + \Delta \mathbf{x}_0 \] Repeat until residuals stop improving significantly.
A small sanity check: if the geometry is poor (for example, the station sees the spacecraft almost tangentially for the whole pass), the matrix \(\mathbf{H}^T\mathbf{W}\mathbf{H}\) can become ill-conditioned, and the update may wobble. In that case, reduce the time span or improve measurement diversity.
Step 5: Validate with Residuals and Covariance
After convergence, compute the post-fit residuals \(\mathbf{r}^{*}\). Compare their normalized values to the expected noise level: \[ \text{normalized residual} = \frac{r_i}{\sigma_i} \] If the model is consistent, most normalized residuals should cluster near zero with magnitudes that match the assumed standard deviations.
Also compute the estimated covariance of the initial state: \[ \mathbf{P}_{x_0} = (\mathbf{H}^T \mathbf{W} \mathbf{H})^{-1} \] Interpret \(\mathbf{P}_{x_0}\) as uncertainty in the recovered initial state under the modeling assumptions.
Step 6: Re-Propagate and Compare Trajectories
Finally, propagate the estimated initial state using the same dynamics model used in the estimator. Plot or tabulate predicted versus measured range and range-rate at each time. Agreement within the noise envelope confirms that the recovered orbit is not just numerically close at the initial epoch, but also consistent over the tracking arc.
This closes the loop: truth generation, measurement simulation, weighted least squares estimation, and validation through residual statistics and covariance interpretation.
8. State Estimation with Filtering Methods
8.1 Kalman Filter Basics for Dynamic Systems
A Kalman filter estimates a system’s hidden state from noisy measurements. In orbital mechanics, the “state” might be position and velocity in an inertial frame, while measurements could be angles, range, or Doppler. The filter works in two alternating steps: predict what the state should be, then correct it using what sensors actually saw.
Mind Map: Core Ideas
The Linear-Gaussian Model
Start with the common linear form:
- Dynamics: \(x_k = F x_{k-1} + B u_k + w_k\)
- Measurements: \(z_k = H x_k + v_k\)
Here, \(w_k\) is process noise with covariance Q, and \(v_k\) is measurement noise with covariance R. The filter assumes these noises are zero-mean and uncorrelated with each other.
The matrices have practical meaning. F maps how the state evolves between time steps. H maps state components into what the sensor measures. If your sensor measures only line-of-sight angles, H will not “see” velocity directly, so the filter must infer it through dynamics.
Predict Step
Given the previous estimate \(x̂_{k-1|k-1}\) and its covariance \(P_{k-1|k-1}\), prediction computes:
- \(x̂_{k|k-1} = F x̂_{k-1|k-1} + B u_k\)
- \(P_{k|k-1} = F P_{k-1|k-1} Fᵀ + Q\)
The covariance update is the key best practice: it inflates uncertainty when the dynamics are uncertain (large Q) and propagates correlations through F.
Update Step
When a measurement arrives, form the innovation (also called the residual):
- \(y_k = z_k − H x̂_{k|k-1}\)
The innovation covariance is:
- \(S_k = H P_{k|k-1} Hᵀ + R\)
Then compute the Kalman gain:
- \(K_k = P_{k|k-1} Hᵀ S_k^{-1}\)
Finally:
- \(x̂_{k|k} = x̂_{k|k-1} + K_k y_k\)
- \(P_{k|k} = (I − K_k H) P_{k|k-1}\)
A useful intuition: if R is large (noisy sensors), then \(S_k\) is large and \(K_k\) shrinks, so the filter corrects less. If Q is large (unmodeled dynamics), \(P_{k|k-1}\) grows, \(K_k\) increases, and the filter leans more on measurements.
A Concrete Example with One-Dimensional Motion
Assume a simplified along-track model where the state is position only, and the dynamics between steps are “nearly constant”:
- \(x_k = x_{k-1} + w_k\) so F = 1
- \(z_k = x_k + v_k\) so H = 1
Let Q = 0.04 and R = 0.25. Suppose at step k−1 you have \(x̂_{k-1|k-1} = 10.0\) and \(P_{k-1|k-1} = 0.09\). Predict:
- \(x̂_{k|k-1} = 10.0\)
- \(P_{k|k-1} = 1·0.09·1 + 0.04 = 0.13\)
Now a measurement arrives: \(z_k = 10.6\). Innovation:
- \(y_k = 10.6 − 10.0 = 0.6\)
- \(S_k = 1·0.13·1 + 0.25 = 0.38\)
- \(K_k = 0.13 / 0.38 ≈ 0.342\)
Update:
- \(x̂_{k|k} = 10.0 + 0.342·0.6 ≈ 10.205\)
- \(P_{k|k} = (1 − 0.342)·0.13 ≈ 0.085\)
Notice what happened: the estimate moved toward the measurement, but not all the way. The remaining uncertainty dropped, because the measurement provided information.
Best Practices That Prevent Common Mistakes
- Use consistent units and time steps. If your propagation uses seconds but your measurement timestamps are in milliseconds, F and Q won’t match reality.
- Tune Q and R to represent uncertainty, not “confidence vibes.” A good check is whether innovations behave like zero-mean noise with covariance near \(S_k\).
- Track covariance symmetry and positive definiteness. Numerical implementations should preserve P as symmetric and nonnegative; otherwise the gain can misbehave.
Minimal Pseudocode for the Two-Step Loop
Given xhat, P at time k-1
Predict:
xhat = F*xhat + B*u
P = F*P*F' + Q
Update when z is available:
y = z - H*xhat
S = H*P*H' + R
K = P*H'*inv(S)
xhat = xhat + K*y
P = (I - K*H)*P
Return xhat, P
With these foundations, later sections can extend the same logic to nonlinear dynamics and nonlinear measurement models while keeping the predict–update structure intact.
8.2 Extended Kalman Filter and Nonlinear State Models
Real spacecraft dynamics are rarely linear in the states. The Extended Kalman Filter (EKF) handles this by using a first-order approximation of the nonlinear model around the current estimate. The result is a practical method that keeps the same “predict then correct” rhythm as the linear Kalman filter, while admitting nonlinear physics.
Nonlinear State Models and Measurement Functions
Start with a discrete-time nonlinear system:
- State propagation: \(x_{k+1}=f(x_k,u_k)+w_k\)
- Measurement: \(z_k=h(x_k)+v_k\)
Here \(x\) is the state (for example position, velocity, and possibly clock bias), \(u\) is control input (thrust commands or maneuver parameters), \(z\) is the measurement (range, Doppler, angles), and \(w_k\), \(v_k\) are zero-mean noises with covariances \(Q_k\) and \(R_k\).
A key modeling best practice is to keep \(f\) and \(h\) consistent with the frames and time tags used elsewhere in the system. If your propagation uses an inertial frame but your measurement model assumes Earth-fixed coordinates, the filter will “work” while quietly learning the wrong physics.
Linearization Around the Current Estimate
The EKF replaces nonlinear functions with local linear approximations. Define the Jacobians:
- \(F_k=\left.\frac{\partial f}{\partial x}\right|*{\hat{x}*{k|k}}\)
- \(H_k=\left.\frac{\partial h}{\partial x}\right|*{\hat{x}*{k|k-1}}\)
Then the covariance update uses these Jacobians exactly like the linear Kalman filter. The state update uses the nonlinear measurement function directly, which is why EKF often performs better than a fully linearized measurement-only approach.
EKF Predict Step
Given \(\hat{x}*{k|k}\) and \(P*{k|k}\):
- Predict state: \(\hat{x}*{k|k-1}=f(\hat{x}*{k|k},u_k)\)
- Predict covariance: \(P_{k|k-1}=F_k P_{k|k} F_k^T + Q_k\)
A practical check: if \(Q_k\) is too small, the filter becomes overconfident and may diverge when the dynamics model misses effects like drag or unmodeled thrust. If \(Q_k\) is too large, the filter becomes sluggish and the estimate chases measurement noise.
EKF Update Step
Compute the innovation (residual):
\(y_k=z_k-h(\hat{x}_{k|k-1})\)
Innovation covariance:
\(S_k=H_k P_{k|k-1} H_k^T + R_k\)
Kalman gain:
\(K_k=P_{k|k-1} H_k^T S_k^{-1}\)
Update:
- \(\hat{x}*{k|k}=\hat{x}*{k|k-1}+K_k y_k\)
- \(P_{k|k}=(I-K_k H_k)P_{k|k-1}\)
Numerical best practice: prefer a Joseph-form covariance update when stability matters, especially with ill-conditioned \(S_k\). It costs a bit more computation but avoids negative variances caused by roundoff.
Mind Map: EKF Workflow and Modeling Choices
Example: EKF for Range-Only Tracking with Nonlinear Geometry
Assume a 2D target with state \(x=[p_x,p_y,v_x,v_y]^T\). Propagation uses constant velocity:
\(f(x,u)=\begin{bmatrix}p_x+v_x\Delta t\ p_y+v_y\Delta t\ v_x\ v_y\end{bmatrix}\)
Measurements are range-only from a fixed station at \(s=[s_x,s_y]\):
\(h(x)=\sqrt{(p_x-s_x)^2+(p_y-s_y)^2}\)
This measurement is nonlinear because of the square root. The EKF linearizes \(h\) using \(H_k\), which contains partial derivatives of range with respect to \(p_x\) and \(p_y\). A common pitfall is dividing by a near-zero range; in practice you guard against small denominators by using a minimum range threshold in the Jacobian computation.
A concrete workflow for one update cycle:
- Start with \(\hat{x}_{k|k-1}\) from propagation.
- Compute predicted range \(\hat{z}=h(\hat{x}_{k|k-1})\).
- Form innovation \(y=z-\hat{z}\).
- Compute \(H_k\) from the current position estimate.
- Compute \(S_k\), \(K_k\), and update the state.
If the station geometry is poor (for example, the target stays nearly on a circle around the station), range-only measurements provide limited information about tangential motion. The EKF will reflect this through larger posterior covariance in the poorly observed directions.
Practical Guidance for Nonlinear EKF Reliability
- Use consistent units and coordinate conventions in both \(f\) and \(h\). A mismatch in meters versus kilometers is the fastest route to a filter that “never converges.”
- Validate Jacobians with finite-difference checks on representative states. If the analytic Jacobian is wrong, the EKF can become confidently wrong.
- Monitor innovation statistics. If \(y_k\) repeatedly falls outside what \(S_k\) predicts, either \(R_k\) is mis-modeled or the linearization point is too far from the true state.
- Keep the state vector minimal but sufficient. Adding extra parameters without observability makes \(P\) inflate and updates become noisy.
When EKF Linearization Is Not Enough
EKF assumes the nonlinear functions are well-approximated by a first-order model near \(\hat{x}\). If the system is highly nonlinear over the uncertainty region, the filter may require smaller time steps, better initial estimates, or a more robust nonlinear treatment. In practice, you can often improve EKF behavior by tightening the propagation interval and ensuring \(Q_k\) matches the true model error rather than “hoping” the correction will fix everything.
8.3 Process Noise Modeling and Measurement Noise Calibration
Process noise and measurement noise are the two knobs that decide whether a filter trusts its model or its sensors. Process noise represents what your dynamics model cannot capture: unmodeled drag, imperfect thrust, gravity model truncation, attitude errors, and even small timing offsets that leak into the state. Measurement noise represents sensor uncertainty: thermal noise, multipath, clock jitter, and quantization.
Mind Map: Noise Roles and Where They Enter
Process Noise Modeling from First Principles
Start from the continuous-time state model:
- ẋ = f(x, u, t) + G w
Here w is a zero-mean white noise process with covariance E[wwᵀ] = Qc. The matrix G maps noise into the state. If you do not have a clear physical mapping, you can still use a pragmatic G, but you should be explicit about what the noise is “allowed” to affect.
A common discrete-time form for filtering is:
- xₖ₊₁ = Fₖ xₖ + Bₖ uₖ + wₖ
- E[wₖ wₖᵀ] = Qₖ
You can obtain Qₖ by discretizing the continuous model. A simple and often adequate approximation is:
- Qₖ ≈ G Qc Gᵀ Δt
This works when Δt is small and the noise effect over one step is roughly linear. If your propagation step is large or the dynamics are strongly nonlinear, you should use a more accurate discretization method (for example, integrating the state transition and noise mapping over the interval).
Choosing Process Noise Structure Without Guessing Blindly
Process noise is not just a magnitude; it is also a structure. For orbital dynamics, a useful pattern is to tie noise to the dominant unmodeled accelerations.
- If drag is imperfect, model noise as acceleration uncertainty in the along-track and cross-track directions.
- If thrust is imperfect, model noise as acceleration uncertainty aligned with the thrust axis and its orthogonal components.
- If attitude affects thrust direction, include noise that couples attitude error into translational acceleration.
A practical example: suppose your state is position and velocity in an inertial frame, and your model includes a nominal drag acceleration a_d,nom. Let the drag error be δa_d with covariance σ_a². Then you can set process noise to act on velocity:
- G = [0; I] in block form so that w affects v̇
- Qₖ = σ_a² Δt * diag(1,1,1) in the velocity subspace
This makes the filter uncertainty grow in the way drag errors actually manifest: they accumulate into velocity and then into position.
Measurement Noise Calibration Using Residual Statistics
Measurement noise calibration is about making R match the actual residual behavior. The residual is:
- rₖ = zₖ − h(x̂ₖ|ₖ₋₁)
If your measurement model h is correct and the filter is consistent, the innovation covariance should satisfy:
- Sₖ = Hₖ Pₖ|ₖ₋₁ Hₖᵀ + Rₖ
A practical calibration loop uses normalized innovations. For scalar measurements, compute:
- νₖ = rₖ / sqrt(Sₖ)
For vector measurements, use νₖᵀ νₖ with the appropriate whitening. If νₖ behaves like a standard normal sequence, your R is in the right ballpark. If νₖ is consistently too large, R is too small (you are over-trusting the sensor). If νₖ is too small, R is too large (you are under-trusting the sensor).
Mind Map: A Systematic Tuning Workflow
Example: Calibrating R for Range and Doppler
Assume you measure range ρ and range rate ρ̇. A simple measurement model is:
- ρ = ||r_sc − r_gs|| + ε_ρ
- ρ̇ = (v_sc − v_gs) · \( r_sc − r_gs \)/||r_sc − r_gs|| + ε_ρ̇
Let the measurement noise covariance be diagonal:
- R = diag(σ_ρ², σ_ρ̇²)
You can estimate σ_ρ and σ_ρ̇ from a short arc by running a preliminary filter with rough values, then computing the innovation statistics. If the normalized range residuals have variance 1.5, scale σ_ρ by sqrt(1.5). Do the same for Doppler. Keep the two channels separate unless you observe correlated residuals that persist after accounting for geometry.
Example: Process Noise Tuning with a Consistency Check
Suppose your filter uses Q that is too small. Then P will shrink too aggressively, S will be too small, and innovations will appear larger than expected. The normalized residuals will exceed the unit-variance target. Increasing process noise typically fixes this by letting P grow, which increases S and reduces the normalized residual magnitude.
A good practice is to tune Q in the subspace you believe is uncertain. If drag dominates, increase velocity-subspace noise rather than inflating position noise directly. That keeps the filter’s uncertainty growth physically plausible and avoids compensating for modeling errors in the wrong place.
Practical Guardrails for Q and R
- Keep Q and R positive semidefinite; if you build them from variances, enforce nonnegative parameters.
- Avoid mixing units silently; process noise in acceleration and measurement noise in meters or meters per second must be consistent with the state definition.
- Check residual mean as well as variance; a nonzero mean often indicates a bias in the measurement model or a missing term in dynamics, not just incorrect noise scaling.
- Tune one knob at a time when possible; otherwise you can end up with a “works on this dataset” covariance that fails elsewhere.
When Q and R are calibrated this way, the filter’s uncertainty becomes a useful quantity rather than a decorative one: it predicts how wrong you should expect the state estimate to be, and the residuals tell you whether that expectation matches reality.
8.4 Smoothing and Batch Versus Sequential Estimation
State estimation often comes in two flavors: batch methods that use all available measurements at once, and sequential methods that update the estimate as data arrives. Smoothing sits slightly to the side: it produces improved estimates for past times by using measurements from both before and after those times. If filtering is “what do I know now?”, smoothing is “what did I know then, given everything I later learned?”
Mind Map: Batch Filtering and Smoothing
Batch Estimation as Global Least Squares
In batch estimation, you define a measurement model and a dynamic model, then solve for the state trajectory that best explains the data. For a nonlinear system, you typically linearize around an initial guess and solve a weighted least-squares problem. The result is a set of states across time, plus a covariance that reflects how measurement noise and model uncertainty propagate through the entire time window.
A practical best practice is to keep the residuals well-scaled. If range residuals are in meters and angle residuals are in radians, the weighting matrix must reflect their noise levels, or the solver will “prefer” one type of measurement simply because it has larger numeric magnitude.
Sequential Estimation as Filtering
Sequential estimation processes measurements in time order. In the common linear-Gaussian case, the Kalman filter maintains two objects at each step: the predicted state and covariance, then the updated state and covariance after incorporating the new measurement. This recursion avoids storing the full history and is computationally efficient.
A subtle but important nuance: filtering produces optimal estimates for the current time given measurements up to that time, not for earlier times. The covariance you get for past states is therefore “frozen” at the moment you passed them.
Smoothing as Retrospective Refinement
Smoothing improves estimates for earlier times by reusing information that arrives later. The most common approach in orbit problems is the fixed-interval smoother, which takes a filtered forward pass and then performs a backward pass to adjust past states.
For linear systems with Gaussian noise, the smoothed estimate remains consistent with the least-squares optimum over the entire interval. In nonlinear settings, you still linearize, but the backward pass uses the stored linearization and covariances from the forward pass.
Mind Map: How Smoothing Uses Information
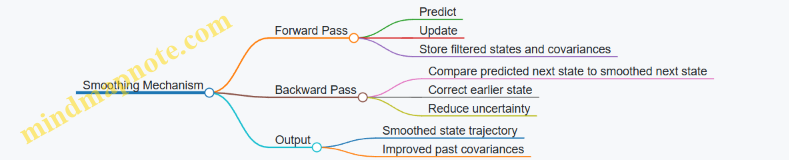
A Concrete Example with Tracking Data
Consider a spacecraft observed by ground stations producing range and range-rate measurements every 30 seconds. Suppose you run a filter over a 2-hour arc. The filter gives you good estimates at each epoch, but the estimate at, say, t = 60 minutes only uses measurements up to that point.
Now apply smoothing over the same arc. The backward pass uses measurements from after t = 60 minutes to correct the earlier state. In practice, you’ll see two effects:
- Smaller uncertainty for past states: the smoothed covariance at t = 60 minutes is typically lower than the filtered covariance.
- Better trajectory consistency: if you later propagate the smoothed states forward, the residuals against measurements tend to look more uniform across the arc.
A best practice is to compare both filtered and smoothed residuals using the same innovation definition. If you compute residuals differently, you can accidentally make smoothing look worse or better than it truly is.
Batch Versus Smoothing in Practice
Batch estimation and smoothing can both be viewed as solving a global problem, but they differ in how they use computation:
- Batch solves for the entire trajectory directly, which can be expensive for long arcs.
- Smoothing typically reuses the forward filter structure and performs a backward correction, which is often cheaper while still capturing the benefit of future measurements.
A practical rule of thumb: if you need the best estimate for the full arc and you can afford the computation, batch is strong. If you need near-real-time updates but also want improved past states after the fact, smoothing is usually the sweet spot.
Implementation Checklist for Reliable Results
- Use consistent time indexing: the backward pass must align with the same epoch grid used in the forward pass.
- Store what you need: filtered states, covariances, and the linearized dynamics terms used in the forward pass.
- Check covariance sanity: smoothed covariances should not increase wildly compared to filtered ones unless the model or linearization is inconsistent.
- Validate with propagation: propagate smoothed states forward and verify that measurement residual statistics remain consistent with the assumed noise.
Mind Map: Common Failure Modes
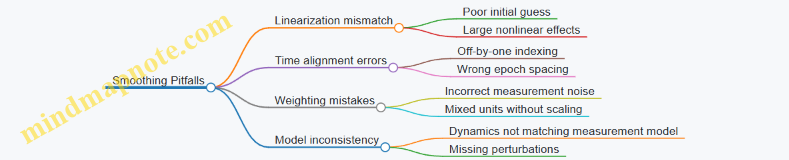
When these pieces are aligned, smoothing gives a coherent story: filtering tells you what you knew at each time using past data, and smoothing revises that story using the full measurement record without changing the underlying physics model.
8.5 Practical Example Filtering a Noisy Orbit Determination Sequence
This example walks through a complete orbit determination loop using a filtering approach. You will start with a simple nonlinear measurement model, generate noisy observations, and then estimate the spacecraft state by combining a prediction step with a correction step. The goal is not to produce the “perfect” orbit, but to show how uncertainty shrinks when the data are informative.
Problem Setup and State Choice
Assume a spacecraft is in low Earth orbit. Use an Earth-centered inertial frame and represent the state as position and velocity:
- State vector: \(x = [\mathbf{r}; \mathbf{v}]\)
- Dynamics: \(\dot{\mathbf{r}} = \mathbf{v}\), \(\dot{\mathbf{v}} = \mathbf{a}(\mathbf{r})\)
- Gravity model: two-body acceleration \(\mathbf{a}(\mathbf{r}) = -\mu \mathbf{r}/|\mathbf{r}|^3\)
For measurements, suppose a ground station provides range and range-rate (a common pair that keeps the math manageable):
- Range: \(\rho = |\mathbf{r} - \mathbf{r}_s|\)
- Range-rate: \(\dot{\rho} = \hat{\boldsymbol{\rho}}^T(\mathbf{v} - \mathbf{v}_s)\)
Here \(\mathbf{r}_s, \mathbf{v}_s\) are station position and velocity in the same inertial frame at the measurement time.
Mind Map: Orbit Filtering Example
Generate Noisy Observations
Pick a truth state \(x_{true}\) and propagate it to a sequence of measurement times, for example every 60 seconds starting on 2026-02-08. At each time, compute the noiseless measurement \(z_{true} = h(x_{true})\). Then add noise:
- \(z = z_{true} + \epsilon\)
- \(\epsilon \sim \mathcal{N}(0, R)\)
Use a diagonal \(R\) for simplicity:
- Range noise standard deviation: \(\sigma_\rho\)
- Range-rate noise standard deviation: \(\sigma_{\dot{\rho}}\)
A practical habit: keep \(\sigma_\rho\) and \(\sigma_{\dot{\rho}}\) consistent with your expected tracking system. If you set them too small, the filter will “trust” measurements more than it should and may oscillate.
Initialization with Intentional Imperfection
Choose an initial estimate \(x_0\) that is close but not exact. For instance, perturb the truth position by a few kilometers and velocity by tens of meters per second. Set \(P_0\) to reflect that uncertainty. A good rule of thumb for this example is:
- Position covariance scales with the square of the position error magnitude
- Velocity covariance scales with the square of the velocity error magnitude
If \(P_0\) is unrealistically tiny, the filter behaves like it refuses to learn.
Prediction Step with Nonlinear Dynamics
Between measurements, propagate \(x\) forward using the nonlinear two-body equations to get \(x^-\). For the covariance, propagate a linearized model. In practice you can compute a state transition matrix \(\Phi\) from the variational equations, then:
- \(P^- = \Phi P_0 \Phi^T\)
Even if you do not implement the full variational system, the conceptual structure matters: the covariance grows when dynamics allow uncertainty to spread.
Update Step with Linearization of the Measurement Model
At each measurement time, compute the predicted measurement \(z^- = h(x^-)\). Form the residual:
- \(y = z - z^-\)
Compute the Jacobian \(H = \partial h/\partial x\) evaluated at \(x^-\). Then:
- \(S = H P^- H^T + R\)
- \(K = P^- H^T S^{-1}\)
- \(x^+ = x^- + K y\)
- \(P^+ = (I - K H) P^-\)
A small but important detail: range and range-rate have different units, so the Jacobian and \(R\) must be consistent. Otherwise, the gain will overweight one channel.
Concrete Numerical Example Structure
Use five measurements. Suppose the initial residuals are large because \(x_0\) is off. After the first update, you should see:
- The position estimate shift toward the truth
- The covariance shrink in directions that measurements constrain
After subsequent updates, residuals should typically decrease in magnitude. To check consistency, compute normalized residuals:
- \(r_i = y_i / \sqrt{S_{ii}}\)
If most \(|r_i|\) values stay around order 1, your noise model and linearization are doing their job. If they are consistently huge, either the initial guess is too far, the linearization is poor, or \(R\) is too optimistic.
Diagnostics and Best Practices
- Track covariance contraction: \(P^+\) should not grow after a correct update.
- Watch for poor linearization: if residuals get worse after an update, the Jacobian may be evaluated too far from the truth.
- Use measurement scheduling: range and range-rate are more informative when the station geometry changes; repeated measurements with nearly identical geometry constrain less.
- Keep units and frames consistent: a common failure mode is mixing station coordinates with inertial state without the correct transformation.
By the end of the sequence, the estimate \(x\) should be closer to \(x_{true}\), and the uncertainty should reflect what the data actually support. The filter is doing a simple job well: prediction from dynamics, correction from measurements, and uncertainty updates that stay tied to the information content of the observation sequence.
9. Numerical Orbit Propagation and Integration Methods
9.1 Propagator Requirements and Error Sources
A numerical orbit propagator turns a dynamical model into a time history of spacecraft state. “Requirements” means more than choosing an integrator: you must match the model fidelity, numerical accuracy, and operational constraints so the output is trustworthy for orbit determination, maneuver planning, and navigation updates.
What a Propagator Must Deliver
A good propagator provides:
- Correct state evolution: position and velocity must follow the specified forces and reference frames.
- Consistent time handling: the mapping from mission time to dynamics time must be unambiguous.
- Deterministic repeatability: rerunning with the same settings should reproduce results within tolerance.
- Error visibility: you need diagnostics that tell you when accuracy is degrading.
A practical way to define requirements is to start from the downstream use. If the propagated state feeds a measurement model, then the propagator must be accurate enough that its error does not dominate measurement residuals.
Core Inputs and Model Consistency
Before numerical methods, ensure the model is internally consistent:
- Forces: gravity model truncation, drag model parameters, and thrust or maneuver profiles must be defined for the same time span and coordinate conventions.
- Reference frames: the state must be expressed in the frame assumed by the force model and the measurement model. A common failure mode is mixing Earth-fixed and inertial quantities without a clear transformation.
- Units and scaling: meters versus kilometers and seconds versus days are the classic “it runs but it’s wrong” errors.
A quick sanity check is to propagate a simple case with known behavior, such as a two-body orbit with only central gravity. If the orbit element trends match expectations, you’ve likely aligned frames, units, and time.
Numerical Integration Requirements
Numerical integration introduces discretization error. The propagator must control it through:
- Step size strategy: fixed steps are simple but can miss fast dynamics near perigee or during burns; adaptive steps reduce wasted work.
- Local error control: many solvers estimate error per step and adjust step size to keep it within tolerance.
- Event handling: maneuvers, eclipse transitions, or ground station visibility boundaries require accurate detection.
- Stability and accuracy: some problems can be sensitive to step size even if they look smooth.
A useful rule is to set tolerances based on what you can tolerate in the final state. For example, if you need position accuracy at the meter level over an hour, you should not accept a solver configuration that produces centimeter-level errors early and then lets them accumulate silently.
Error Sources and How They Show Up
Discretization Error
This is the difference between the true continuous dynamics and the numerical approximation. It typically grows with time and depends strongly on step size and method order.
Example: Propagate the same perturbed orbit with step sizes of 10 s and 60 s. If the larger step produces noticeably different perigee passage timing or secular drift in elements, discretization error is dominating.
Model Truncation Error
Even with perfect numerics, the force model may be incomplete. Truncating spherical harmonics, simplifying drag, or ignoring higher-order relativistic terms creates a systematic bias.
Example: Compare propagation using only J2 versus J2 plus J3 for an inclined orbit. If the node precession differs in a consistent way, the discrepancy is model truncation, not integrator noise.
Frame and Time Scale Errors
These errors are often subtle because the code still produces plausible trajectories.
- Frame mismatch: applying Earth rotation when the state is already Earth-fixed (or vice versa).
- Time scale mismatch: using the wrong time argument for Earth orientation or atmospheric models.
Example: If you compute drag using an atmosphere model that expects a specific time scale, the density can be slightly off, causing element changes that look like “mysterious drag.”
Floating-Point and Roundoff Error
Roundoff error grows when you take extremely small steps or perform many operations with ill-conditioned transformations.
Example: If you reduce tolerances by orders of magnitude and see the solution stop improving—or even worsen—roundoff may be taking over.
Sensitivity to Initial Conditions
Orbital dynamics can amplify small initial state errors, especially with perturbations. This is not a numerical bug; it’s a property of the system.
Example: Propagate two states that differ by 1 mm in position and compare separation growth. If the separation grows rapidly, you need to interpret accuracy metrics carefully.
Diagnostics That Actually Help
A propagator should report or enable:
- Step statistics: number of steps, min/max step size, and rejected steps.
- Error estimates: solver-provided local error norms.
- Conservation checks: for two-body propagation, verify energy and angular momentum trends.
- Residual checks: when used in orbit determination, monitor how propagation error affects measurement residuals.
Mind Map: Propagator Requirements and Error Sources
Worked Mini-Workflow for Requirement Setting
- Start with a baseline model: two-body gravity only.
- Validate numerics: tighten tolerances until conservation checks stabilize.
- Add one perturbation at a time: J2, then drag, then thrust.
- Compare step settings: ensure changes in output come from the model, not the integrator.
- Lock tolerances to mission needs: choose settings that keep propagation error below the level that would noticeably bias measurement residuals.
This approach keeps you from chasing ghosts: you identify whether discrepancies are numerical, physical, or due to frame and time handling. That’s the difference between “the orbit looks right” and “the orbit is right.”
9.2 Ordinary Differential Equation Solvers and Step Control
Most orbit propagation problems reduce to integrating a state vector \(x(t)\) governed by \(\dot{x}=f(t,x)\). The solver’s job is to approximate \(x(t)\) at a sequence of time points while keeping numerical error small and computational cost reasonable. Step control is the mechanism that decides how large each time step can be without breaking accuracy.
Mind Map: Solver Choices and Step Control
From Local Error to Step Size
A variable-step Runge–Kutta method typically computes two approximations over the same step: one higher order and one lower order. Their difference estimates the local truncation error \(e\). You then compare \(e\) to a tolerance \(\text{tol}\) to decide whether to accept the step.
A common tolerance strategy scales error by the magnitude of the state components:
- Absolute tolerance \(\text{atol}\) handles small values.
- Relative tolerance \(\text{rtol}\) handles large values.
For each component \(i\), you form a normalized error \(E_i\) and combine them into a single measure (often a norm). If \(E\le 1\), accept; otherwise reject and retry with a smaller step.
Step Acceptance and Rejection Workflow
The logic is simple but important: rejection is not a failure, it’s a controlled correction. A typical workflow is:
- Propose step \(h\).
- Compute candidate solution and local error estimate.
- If error is acceptable, advance time by \(h\).
- If not, reduce \(h\) and recompute.
- Update \(h\) after acceptance using the error order.
The step update rule uses the method order \(p\). If the error scales like \(h^{p+1}\), then a reasonable new step is
\[ h_{new}=h\cdot \text{safety}\cdot \left(\frac{1}{E}\right)^{1/(p+1)}. \]
The safety factor (like 0.8 or 0.9) prevents oscillation between accept and reject.
Example: Choosing Tolerances for Orbit State Components
Suppose your state is \(x=[\mathbf{r},\mathbf{v}]\) in meters and meters per second. Position errors of 10 meters might be fine for one use case, but velocity errors of 0.01 m/s might be too large for another.
A practical approach is to set:
- \(\text{atol}_r\) around the smallest position accuracy you care about.
- \(\text{atol}_v\) around the smallest velocity accuracy you care about.
- \(\text{rtol}\) small enough to keep relative errors controlled across the orbit.
Then scale each component’s error by \(\text{atol}+\text{rtol}\cdot|x|\). This avoids a common mistake: letting large-magnitude components dominate the error metric.
Fixed Step vs Variable Step in Orbital Context
Fixed step methods can be attractive because they are predictable, but they struggle when dynamics change quickly. Drag, thrust, and close approaches to perigee can demand smaller steps to maintain accuracy.
Variable step methods adapt naturally. For example, when \(|\mathbf{v}|\) grows near perigee, the solver can reduce \(h\) to keep the local error within tolerance. When the motion becomes smoother, it can increase \(h\) to save computation.
Handling Events Without Breaking the Integrator
Orbit propagation often includes discontinuities: impulsive burns, switching force models, or terminating at a ground impact. If you let the solver step over an event, you lose the exact timing.
A robust pattern is event detection with step subdivision:
- Define an event function \(g(t,x)\) whose zero crossing indicates the event.
- When \(g\) changes sign, bracket the root within the last step.
- Use a root-finding procedure (like bisection) to locate the event time.
- Stop at the event, apply the discontinuity, then restart integration.
This keeps maneuver timing consistent, which matters for both trajectory prediction and orbit determination.
A Minimal Pseudocode for Adaptive Step Control
Given x(t0), t = t0, step h
while t < tf:
compute x_candidate, error_estimate over [t, t+h]
E = norm(error_estimate / (atol + rtol*|x_candidate|))
if E <= 1:
t = t + h
x = x_candidate
h = clamp(h * safety * (1/E)^(1/(p+1)), h_min, h_max)
if E > 1:
continue # retry with smaller h
Diagnostics That Catch Solver Problems Early
Step control can keep local error small while still producing wrong global behavior if the model is inconsistent or if tolerances are mis-scaled. Simple diagnostics help:
- Track step sizes: frequent tiny steps can indicate stiffness or poor scaling.
- Monitor energy-like quantities when only conservative forces are present.
- Compare results at two tolerance levels to see whether key outputs converge.
These checks are not fancy, but they prevent the classic situation where the integrator is “working” while the propagation is quietly drifting.
Example: Convergence Check for a Perturbed Orbit
Propagate the same initial state with two tolerance settings, \((\text{rtol},\text{atol})\) and a tighter pair. If the difference in final position and velocity decreases roughly as expected for the method order, your step control is behaving. If it doesn’t, the issue is usually tolerance scaling, event handling, or an error in the dynamics function \(f(t,x)\).
9.3 Handling Stiffness and Event Detection for Maneuvers
When you model maneuvers inside a numerical propagator, two issues tend to show up at the same time: the dynamics become stiff near burn start or end, and you need event detection to switch models exactly when the maneuver logic says so. If you treat both casually, you get step-size thrashing, missed switch times, or discontinuities that poison your state and covariance.
Mind Map: Stiffness and Events
Foundational Idea: Why Stiffness Appears in Maneuver Modeling
Stiffness means the system contains time scales that differ by orders of magnitude. In orbital propagation, the natural orbital time scale is minutes to hours, but maneuver logic can introduce much faster changes: a thrust direction update, a finite-burn acceleration ramp, or a switch from “coast” to “thrust.” Even if the physical thrust is smooth, the model switching can create an effectively fast time scale because the right-hand side of the ODE changes abruptly.
A practical symptom is that the integrator keeps shrinking the step size around burn boundaries, then grows it again after the switch. You can also see it in rejected steps: the solver tries a step, discovers the local error estimate is too large, and retries with a smaller step.
Event Detection: Turning Logic into Mathematics
Event detection is how you tell the solver, “Stop here, because the model must change.” You define one or more event functions whose roots correspond to meaningful transitions. For example:
- Burn start:
g(t) = t - t_start(root att_start) - Burn end:
g(t) = t - t_end - Altitude constraint:
g(t) = r(t) - (R_E + h_target) - Eclipse entry:
g(t) = n_sun · n_sc - cos(θ_shadow)using a geometry-based criterion
The key is sign change. If g(t) does not cross zero within a step, the solver may miss the event. That’s why you often combine event functions with a step-size strategy that prevents large steps from spanning multiple events.
Systematic Workflow for Maneuver Events
- Define modes: coast, thrust, and any special force models (e.g., drag with different coefficients).
- Write event functions for each mode switch and constraint.
- Configure the integrator to locate roots accurately, not just approximate them.
- Apply the mode switch at the detected event time, then continue propagation.
- Check continuity: position should be continuous; velocity may be continuous for smooth thrust but can show a kink for impulsive approximations.
A clean way to implement mode switching is to keep the state continuous and only change the force model.
# Pseudocode for event-driven mode switching
mode = "coast"
for each integration segment:
integrate until next event root
if event == "burn_start":
mode = "thrust"
elif event == "burn_end":
mode = "coast"
elif event == "altitude":
mode = "constraint_handling"
continue from event time
Handling Stiffness Without Overcorrecting
Event detection reduces discontinuity errors, but stiffness can still slow the solver. Use these best practices:
- Tighten tolerances near events: keep global tolerances reasonable, but allow the solver to work harder only when needed.
- Limit maximum step size: set
h_maxso a single step cannot jump over a burn boundary or a constraint crossing. - Avoid unnecessary switching: if thrust direction is constant during a segment, don’t recompute it with a discontinuous logic branch every step.
- Prefer smooth thrust profiles: a finite-burn ramp (e.g., linear or cosine ramp) reduces effective stiffness compared with a hard step in acceleration.
Example: Finite Burn with Altitude Constraint
Suppose you plan a finite burn from t_start to t_end, but you must stop thrust when altitude reaches h_target. You define two events: burn end and altitude crossing. The solver integrates forward and stops at whichever event occurs first.
- If altitude hits first, you switch to coast at the altitude root, even if
t_endis later. - If burn end hits first, you coast afterward and ignore the altitude event until it occurs.
This ordering matters because the altitude event function depends on the current force model; switching at the wrong time changes the root.
Validation Checks That Actually Catch Bugs
After propagation, verify:
- Event time accuracy: compare detected event times against the scripted
t_start/t_endfor scheduled events. - No missed roots: ensure each event that should occur did occur once.
- Reasonable solver behavior: rejected steps should cluster near events, not throughout the orbit.
- State sanity: position remains finite and velocity changes match the expected thrust regime.
If these checks pass, you’ve handled stiffness and events in a way that keeps the dynamics consistent and the maneuver logic trustworthy.
9.4 Conservation Checks and Diagnostic Metrics
Conservation checks are the sanity tests of an orbit propagator. They answer a simple question: if the physics says something should stay nearly constant, does the numerical method respect it? The key is to choose metrics that match the force model. A check that assumes “no forces except gravity” will fail (correctly) when you include drag or thrust.
What to Check First
Start with the simplest invariants for the current dynamical model.
- Two-body gravity only: check specific mechanical energy and angular momentum magnitude.
- Gravity with Earth harmonics: expect angular momentum components to change; energy is not strictly conserved because the potential is time-invariant but the motion is not purely Keplerian. Still, you can monitor drift relative to a high-accuracy reference.
- Nonconservative forces: drag and thrust break conservation by design, so use diagnostics that measure consistency rather than invariance.
A good workflow is: verify invariants under the simplest model, then add perturbations and switch to “relative” diagnostics.
Mind Map: Conservation Checks and Diagnostic Metrics
Two-Body Invariants That Actually Work
For a state
- position r and velocity v in an inertial frame,
- gravitational parameter μ,
compute:
- Specific mechanical energy
- \(\varepsilon = \tfrac{1}{2}|v|^2 - \mu/|r|\)
- Specific angular momentum vector
- \(\mathbf{h} = \mathbf{r} \times \mathbf{v}\)
- check \(|\mathbf{h}|\) or each component depending on your expectations.
In ideal two-body motion, \(\varepsilon\) and \(\mathbf{h}\) are constant. In practice, numerical integration causes small drift. Track relative drift to avoid misleading results when the magnitude changes:
- \(\Delta\varepsilon(t) = (\varepsilon(t)-\varepsilon(0))/|\varepsilon(0)|\)
- \(\Delta h(t) = (|\mathbf{h}(t)|-|\mathbf{h}(0)|)/|\mathbf{h}(0)|\)
If you halve the step size and the drift decreases by roughly the expected order of the integrator, you’ve got a healthy method.
Energy Drift Under Conservative Perturbations
When you include a conservative gravity model (e.g., Earth potential with harmonics), the motion is still governed by a time-invariant potential, but the “Kepler energy” \(\tfrac{1}{2}|v|^2-\mu/|r|\) is no longer the correct invariant. Instead:
- Compute the model-specific potential \(U(\mathbf{r})\) used by your acceleration routine.
- Monitor total specific energy \(E = \tfrac{1}{2}|v|^2 + U(\mathbf{r})\).
This turns the conservation check into a direct consistency test between your force model and your diagnostic.
Nonconservative Forces Use Consistency, Not Conservation
For drag, thrust, or any force with explicit dissipation, invariants will not hold. Replace them with metrics that match the physics.
-
Drag work-energy consistency
- Over a short interval, the change in kinetic energy should correlate with the work done by drag: \(\Delta(\tfrac{1}{2}|v|^2) \approx \int \mathbf{v}\cdot \mathbf{a}_{\text{drag}},dt\).
- Numerically, approximate the integral using the same time steps as the propagator.
-
Thrust momentum accounting
- If thrust acceleration is \(\mathbf{a}_T\) and mass changes are modeled, track \(\Delta\mathbf{v}\) against \(\int \mathbf{a}_T,dt\) and compare with the state update.
These checks catch implementation errors like sign mistakes, frame mismatches, or using the wrong mass in acceleration.
Reversibility and Symmetry Tests
A practical diagnostic is a forward-backward test for conservative dynamics.
- Propagate from \(t_0\) to \(t_1\).
- Reverse the velocity \(\mathbf{v} \leftarrow -\mathbf{v}\) at \(t_1\).
- Propagate back to \(t_0\).
For a well-behaved integrator and correct force model, the final state should return close to the initial one. The error should shrink with smaller step sizes. This test is especially good at revealing subtle bugs that conservation alone might miss.
Constraint Checks and Frame Discipline
Even perfect math can fail if you compute diagnostics in the wrong place.
- Ensure frame consistency: invariants like \(\mathbf{h}\) assume an inertial frame. If you compute in a rotating frame, you’ll see artificial drift.
- Ensure unit consistency: \(\mu\) in km^3/s^2 with r in km is fine; mixing meters and kilometers will produce “mysterious” conservation failures.
- If your model uses event handling (e.g., maneuver start/stop), confirm that diagnostic time series remain continuous across events.
Example Diagnostic Procedure
Use a baseline run and a refined run.
- Run A: step size \(h\)
- Run B: step size \(h/2\)
- Compare \(\Delta\varepsilon(t)\) or \(\Delta E(t)\) and \(\Delta h(t)\)
If Run B shows smaller drift and the ratio of drifts matches the integrator’s expected behavior, you can trust the propagator’s numerical quality for that force model.
Reporting Metrics That Help Debugging
Report diagnostics as time series and also as summary numbers.
- Max absolute drift over the interval
- RMS drift to capture persistent bias
- Event-local spikes to catch discontinuities
A propagator that conserves well but shows spikes at maneuver boundaries likely has a bookkeeping issue. A propagator that drifts smoothly with step size likely has a numerical accuracy limitation. Either way, the diagnostics point to the right category of fix.
9.5 Practical Example Comparing Integrators for a Perturbed Orbit
You have a perturbed orbit model and you want to propagate it reliably. The integrator choice matters because numerical error can masquerade as physics, especially when you compare trajectories over multiple orbits. This example compares three common approaches—fixed-step RK4, adaptive RK45, and a symplectic method—using the same force model and the same initial state.
Problem Setup
Use a near-circular low Earth orbit (LEO) with Earth’s gravity including the J2 term, plus a simple atmospheric drag model. Start from a state at epoch 2026-02-01 00:00:00 UTC (any consistent epoch works; the key is repeatability).
Define the dynamics as
- Position r and velocity v in an inertial frame.
- Acceleration a = a_gravity(J2) + a_drag.
- Drag uses a density model ρ(h) = ρ0 exp(-(h-h0)/H) and a drag acceleration proportional to -v_rel * |v_rel|.
Best practice: keep the force model identical across integrators and ensure the same units (meters, seconds, kilograms) and the same Earth constants.
Mind Map: The Comparison Workflow
Reference Solution and Fairness Rules
Create a reference trajectory using an adaptive method with tight tolerances (for example, RK45 with relative tolerance 1e-12 and absolute tolerance 1e-14). This is not “truth,” but it is a consistent baseline.
Fairness rules:
- Compare states at the same epochs (e.g., every 60 seconds for 10 orbits).
- Use the same output interpolation strategy for all methods.
- Report both error and computational effort (number of force evaluations).
Integrators Under Test
1) Fixed-Step RK4
- Choose a step size Δt, such as 10 s, 30 s, and 60 s.
- RK4 is straightforward and often accurate for smooth dynamics, but drag introduces non-smoothness in the sense that the acceleration depends strongly on speed and density gradients.
2) Adaptive RK45
- Use error control to adjust step size.
- Expect smaller steps near perigee where drag is stronger and where J2 effects change more rapidly.
3) Symplectic Method
- Symplectic schemes are designed to control long-term behavior for conservative systems.
- With drag present, the system is not conservative, so you should not expect perfect energy behavior; instead, look for reduced phase error and stable geometry.
What to Measure
For each method, compute:
- Position error norm: ||r(t) - r_ref(t)||
- Velocity error norm: ||v(t) - v_ref(t)||
- Energy drift proxy: E = v^2/2 - μ/|r| (note drag will cause real energy loss)
- Angular momentum drift proxy: h = r × v (drag reduces h magnitude)
Best practice: interpret these proxies carefully. If energy changes match the reference trend but the phase is off, the integrator is likely introducing timing/geometry error. If both trend and magnitude diverge, step size or tolerance is too loose.
Example Results and Interpretation
Run each integrator for 10 orbits and compare at common epochs.
- RK4 with Δt = 60 s: position error grows quickly, often showing a roughly linear increase with time. The orbit’s along-track phase shifts relative to the reference, while the overall decay trend from drag is qualitatively correct.
- RK4 with Δt = 10 s: errors remain bounded and the phase alignment improves. You may still see small oscillatory error patterns tied to the fixed step.
- Adaptive RK45: errors stay low and relatively uniform across the orbit. Step sizes shrink near perigee and expand near apogee, which usually produces the best balance of accuracy and cost.
- Symplectic method: you may observe excellent long-term geometric stability, with phase error growing more slowly than coarse RK4. However, because drag is dissipative, energy and angular momentum magnitude will still decay at the physically correct rate only if the method’s effective accuracy is sufficient.
A practical rule of thumb: if the reference and your method agree on the decay rate but not the phase, reduce the step size (or tighten tolerances). If they disagree on both, the force model coupling to the integrator is not being resolved well enough.
Decision Checklist
Choose the integrator that meets your mission needs with the least fuss:
- If you need predictable error with simple implementation: RK4 with a conservative Δt.
- If you need robust accuracy across varying conditions: adaptive RK45.
- If you care about long-term geometric fidelity in nearly conservative regimes: symplectic, but validate under drag.
Finally, log the number of force evaluations and the maximum error over the propagation window. A method that is “accurate” but costs twice as much may still be the right choice, but only if you can justify it with the error metrics you actually care about.
10. Relative Motion and Rendezvous Dynamics
10.1 Relative State Definitions and Reference Trajectory Concepts
Relative motion problems start with a simple question: “Relative to what?” The answer determines the math, the interpretation, and whether your results match what you see in navigation data.
What “Relative” Means in Orbital Dynamics
Relative state usually means the difference between a deputy spacecraft state and a chief spacecraft state, expressed in a chosen coordinate frame. Let the inertial position vectors be \(\mathbf r_d\) and \(\mathbf r_c\). A common definition is \(\Delta\mathbf r = \mathbf r_d - \mathbf r_c\).
That definition alone is not enough, because \(\Delta\mathbf r\) depends on the frame in which you express it. If you express both vectors in an inertial frame, you get inertial-relative motion. If you express them in a rotating local frame attached to the chief, you get the relative motion models used for rendezvous guidance.
Choosing a Reference Trajectory
A reference trajectory is the chief’s predicted motion used to define the local frame and to linearize the dynamics. In practice, it is not just “the chief’s orbit”; it is the specific time history you propagate and compare against.
A good reference trajectory has three properties:
- It is consistent with the coordinate frame you will use.
- It is accurate enough that the deputy’s relative motion stays in the regime where linearization is valid.
- It is available at the same time tags as your deputy state estimates.
For example, if your chief is maneuvering, using a purely Keplerian reference trajectory can create apparent “relative drift” that is really modeling error.
Local-Frame Relative State
The most common local frame is the LVLH frame, built from the chief’s instantaneous position and velocity. Its axes are:
- \(\hat{\mathbf z}\): along the chief position (radial outward)
- \(\hat{\mathbf y}\): along the chief angular momentum (cross-track)
- \(\hat{\mathbf x}\): completes the right-handed triad (along-track)
In LVLH, the relative state is often written as \(\mathbf x_{rel} = [x;y;z]^T\) and \(\mathbf v_{rel} = [\dot x;\dot y;\dot z]^T\), where these components are the deputy’s position and velocity expressed in the LVLH frame.
A key nuance: the LVLH frame rotates. That rotation introduces apparent accelerations even if the deputy matches the chief’s inertial motion. This is why relative dynamics include terms tied to the chief’s angular rate.
Mind Map: Relative State and Reference Choices
From Inertial States to LVLH Relative States
At each epoch \(t\), you compute the LVLH rotation matrix \(\mathbf C_{I\leftarrow L}(t)\) that maps LVLH components to inertial components. Then:
- Chief LVLH position is \(\mathbf r_{c,L} = [0;0;0]^T\) by construction.
- Deputy LVLH position is \(\mathbf r_{d,L} = \mathbf C_{I\leftarrow L}^T (\mathbf r_d - \mathbf r_c)\).
Velocity needs care because \(\mathbf C\) changes with time. A practical way to avoid mistakes is to compute relative velocity using the time derivative of the LVLH-transformed position, rather than subtracting inertial velocities and rotating once.
Example: Why Reference Choice Changes the “Relative” Answer
Suppose the chief is in a near-circular low Earth orbit and performs a small tangential burn. If you build the LVLH frame from a reference trajectory that ignores the burn, the chief’s predicted along-track motion will be slightly off. When you transform the deputy state into LVLH, the deputy appears to drift in along-track even if it actually followed the chief’s true inertial motion.
In other words, the relative state is correct, but the interpretation of what caused the relative motion is wrong. The reference trajectory is part of the model, not just a convenience.
Example: Linearization Regime Check
Many relative motion models assume the deputy stays close to the chief. A simple sanity check is to compare the deputy’s relative distance magnitude \(|\Delta\mathbf r|\) to the chief’s orbital radius \(r\). If \(|\Delta\mathbf r|/r\) is not small, higher-order terms matter and the linear model will show systematic errors.
A practical workflow is to compute relative state in LVLH first, then evaluate \(|\Delta\mathbf r|/r\) at each epoch. If it grows, you either need a more accurate nonlinear relative dynamics model or a tighter reference trajectory.
Summary of Best Practices
- Define relative state with an explicit frame, not just a vector difference.
- Use a reference trajectory that matches the chief’s actual modeling assumptions, including maneuvers.
- Ensure time tags match when transforming states into the local frame.
- Validate the linearization regime using a distance ratio check.
With these pieces in place, later sections can introduce specific relative dynamics equations without hidden assumptions sneaking in through the back door.
10.2 Hill Clohessy Wiltshire Equations for Circular Orbits
When a chaser operates near a target in a near-circular orbit, the relative motion can be modeled with linear differential equations. The Hill–Clohessy–Wiltshire (HCW) equations describe how the chaser’s relative position evolves in a rotating local frame attached to the target. The payoff is practical: you can predict rendezvous geometry with simple computations and clear constraints.
Local-Frame Setup and Assumptions
Use a target-centered, rotating frame (often called LVLH for local vertical local horizontal). Let:
- x point radially outward from Earth through the target.
- y point along-track in the direction of target motion.
- z point cross-track completing the right-handed frame.
Assume:
- The target follows a circular orbit with constant mean motion \(n\).
- The chaser stays close to the target so relative distances are small compared to orbital radius.
- Perturbations like drag and higher gravity terms are neglected (or treated separately).
- The relative motion is expressed in the rotating frame, so fictitious forces appear naturally.
A useful mental check: if the chaser is extremely close, the equations should behave like a linear approximation of the full two-body dynamics.
The HCW Equations
For relative position \(\mathbf{r}_{rel}=[x;y;z]^T\) in the rotating frame, the HCW equations are:
\[ \ddot{x} - 3n^2 x - 2n\dot{y} = 0 \] \[ \ddot{y} + 2n\dot{x} = 0 \] \[ \ddot{z} + n^2 z = 0 \]
These three coupled equations separate into two behaviors:
- In-plane dynamics (x and y) are coupled through the Coriolis-like term \(-2n\dot{y}\) and \(+2n\dot{x}\).
- Cross-track dynamics (z) is independent and behaves like a harmonic oscillator with frequency \(n\).
Mind Map: The HCW Model
Meaning of the Mean Motion \(n\)
For a circular orbit of radius \(a\), the mean motion is \(n=\sqrt{\mu/a^3}\). In practice, compute \(n\) from the target’s orbital elements or from its orbital period \(T\) using \(n=2\pi/T\). A common best practice is to verify that \(n\) has units of rad/s and that your time variable uses seconds.
Solving the Equations with State Transition
HCW can be used in a time-propagation form: given initial relative state \([x_0;y_0;z_0;\dot{x}_0;\dot{y}_0;\dot{z}_0]^T\), compute the relative state at time \(t\). The closed-form solution is linear in the initial conditions, which is why HCW is so convenient for guidance and constraint satisfaction.
A practical workflow:
- Choose a target circular orbit and compute \(n\).
- Express the chaser’s initial relative state in the target frame.
- Use the HCW solution to compute \(x(t),y(t),z(t)\).
- Impose rendezvous constraints like \(x(t_f)=y(t_f)=z(t_f)=0\) and solve for feasible initial velocities or maneuver timing.
Example: Cross-Track Constraint with a Simple Check
Suppose at \(t=0\), the chaser has \(z_0=100\) m and \(\dot{z}_0=0\). The z-equation is \(\ddot{z}+n^2 z=0\), so: \[ z(t)=z_0\cos(nt) \] To achieve \(z(t_f)=0\), you need \(\cos(nt_f)=0\), so \(nt_f=\pi/2\) (the first zero crossing). That gives \(t_f=\pi/(2n)\).
This example is intentionally simple: it shows how cross-track motion can be planned without worrying about x–y coupling.
Example: In-Plane Coupling and Why It Matters
Consider a case where at \(t=0\), \(x_0=50\) m, \(y_0=0\), and \(\dot{x}_0=0\). If you also set \(\dot{y}_0=0\), the radial offset \(x_0\) will generally induce along-track drift through the coupling term \(2n\dot{x}\) in the y equation. The takeaway is operational: you cannot treat along-track motion as independent when you have radial errors.
A best practice is to solve the full in-plane constraints together rather than trying to “fix” x without accounting for the induced y behavior.
Practical Constraint Formulation
For rendezvous at time \(t_f\), a common constraint set is:
- \(x(t_f)=0\)
- \(y(t_f)=0\)
- \(z(t_f)=0\)
- optionally \(\dot{x}(t_f)=0\), \(\dot{y}(t_f)=0\), \(\dot{z}(t_f)=0\)
Because HCW is linear, these constraints become linear equations in the unknown initial conditions (or in maneuver parameters that map into initial relative velocity). This is where HCW earns its keep: you get a direct, checkable relationship between initial state and rendezvous geometry.
Summary of What HCW Gives You
HCW provides a linear, target-centered model for relative motion near a circular orbit. The cross-track motion is a clean harmonic oscillator, while the in-plane motion couples radial and along-track dynamics through the rotating-frame effects. With \(n\) computed correctly and relative states expressed in the same rotating frame, HCW becomes a reliable first-pass tool for rendezvous planning and constraint reasoning.
10.3 Generalized Relative Motion for Elliptical Orbits
Generalized relative motion extends the familiar idea of “relative position” beyond circular reference orbits. For rendezvous, formation flying, and relative navigation, the key challenge is that the reference orbit’s angular rate is not constant in an ellipse. As a result, the relative dynamics depend on where you are along the reference trajectory, not just on time since epoch.
Mind Map: Elliptical Relative Motion
Foundational Setup and Frame Choice
Start with two spacecraft: a chief on a Keplerian ellipse and a deputy whose state is close to the chief’s. Let the chief’s inertial position and velocity be \(\mathbf r_c, \mathbf v_c\), and the deputy’s be \(\mathbf r_d, \mathbf v_d\). Define the relative position and velocity in a local frame attached to the chief. A common choice is the RTN frame: \(\hat{\mathbf R}\) points along \(\mathbf r_c\), \(\hat{\mathbf T}\) along the chief’s velocity direction in the orbital plane, and \(\hat{\mathbf N}\) completes the right-handed triad.
In this frame, the relative state is \(\boldsymbol\rho = [\rho_R,\rho_T,\rho_N]^T\) and \(\dot{\boldsymbol\rho} = [\dot\rho_R,\dot\rho_T,\dot\rho_N]^T\). The frame rotates with the chief, so even if the deputy had no thrust, the relative equations include terms from the chief’s changing orbital geometry.
Linearization About the Chief Orbit
Assume the deputy’s separation is small compared to the chief’s orbital radius scale. Write the deputy state as the chief state plus a small deviation. Linearize the two-body dynamics of the deputy around the chief trajectory. The result is a set of linear differential equations in the relative state, but with coefficients that vary along the chief’s orbit.
For ellipses, the independent variable is often the chief’s true anomaly \(\nu\) rather than time \(t\). The reason is practical: the geometry of the RTN frame and the gravitational gradient felt by the deputy change most naturally with \(\nu\). You still need a mapping between \(\nu\) and time using Kepler’s relations, but keeping \(\nu\) as the driver makes the structure of the equations cleaner.
Governing Equations in Elliptical Form
A useful way to think about generalized relative motion is: it looks like Hill’s equations, but with time-varying “spring constants” and coupling terms.
- The radial and along-track components couple through the changing curvature of the chief’s orbit.
- The out-of-plane component behaves like a harmonic oscillator with a coefficient that depends on \(\nu\).
- The along-track dynamics include terms that reflect the chief’s changing angular rate.
In compact form, the linearized relative dynamics can be written as
\[ \frac{d}{d\nu}\begin{bmatrix}\boldsymbol\rho\\dot{\boldsymbol\rho}\end{bmatrix} = \mathbf A(\nu)\begin{bmatrix}\boldsymbol\rho\\dot{\boldsymbol\rho}\end{bmatrix} \]
where \(\mathbf A(\nu)\) is a matrix of coefficients derived from the chief’s Keplerian geometry. You do not need to memorize \(\mathbf A(\nu)\) to use the method: the workflow is to compute the chief’s orbit, evaluate the coefficients at each \(\nu\), and integrate the linear system.
Example: Elliptical Rendezvous with a Small Along-Track Offset
Consider a chief with semi-major axis \(a\) and eccentricity \(e\). Choose an initial true anomaly \(\nu_0\). Suppose at \(\nu_0\) the deputy is offset by \(\rho_R(\nu_0)=0\), \(\rho_T(\nu_0)=10,\text{m}\), and \(\rho_N(\nu_0)=0\), with zero relative velocity in the RTN frame.
If you used circular Hill equations, you might expect a simple sinusoidal exchange between along-track and radial components. For the ellipse, the exchange is still present, but the timing and amplitude vary with \(\nu\). Near periapsis, the chief moves faster and the frame rotation changes more rapidly, which typically increases the rate at which along-track separation converts into radial motion. Near apoapsis, the same linear model predicts slower evolution.
A practical check is to propagate the full two-body states of both spacecraft and compare the resulting relative RTN components to the linearized solution. If the deputy’s separation stays small (say, tens of meters for a kilometer-scale orbit), the linear model tracks well; if not, the coefficients no longer capture the nonlinear geometry.
Maneuvers and Consistency Checks
For impulsive maneuvers, apply delta-v directly to the deputy’s inertial velocity, then recompute the relative state in the RTN frame at the maneuver instant. For finite burns, the linear model can still be used, but you must include the thrust acceleration projected into the RTN frame and integrate through the burn duration.
Two consistency checks prevent most headaches:
- Use the same anomaly variable in both the coefficient evaluation and the integration step.
- Recompute the RTN basis from the chief state at each evaluation, rather than assuming a fixed rotation.
Common Pitfalls in Elliptical Relative Motion
A frequent mistake is mixing time-based and anomaly-based forms of the equations. Another is assuming the along-track direction is aligned with a constant angular rate; in an ellipse, the direction changes continuously because the velocity direction rotates non-uniformly. Finally, frame inconsistency can masquerade as dynamics: if you compute relative components in one frame but integrate using another, the equations will look “wrong” even when the physics is fine.
10.4 Guidance and Control Inputs for Relative Trajectory Shaping
Relative motion guidance is about choosing inputs so the chaser’s relative state follows a planned path while respecting constraints like thrust limits, keep-out zones, and timing windows. In rendezvous problems, the “relative state” is typically expressed in a rotating local frame tied to the target’s orbit, so the control problem becomes: pick thrust (or equivalent acceleration commands) that drives the relative position and velocity toward desired values at future times.
Mind Map: Relative Trajectory Shaping
From Relative Dynamics to Control Inputs
Start with the relative equations of motion in the chosen local frame. For near-circular reference orbits, the Hill–Clohessy–Wiltshire form gives linear dynamics where the control enters as relative acceleration components. Even when the exact model is more general, the key idea remains: your control input is an acceleration vector expressed in the same frame as the relative state.
A practical best practice is to define a consistent mapping early. If your guidance law outputs a desired acceleration in the local frame, then the thrust command must be converted into that same frame using attitude information. A common failure mode is mixing inertial and local components, which can look “almost right” for short arcs and then drift badly.
Guidance Objectives That Actually Matter
Relative trajectory shaping usually targets a terminal condition such as:
- Relative position error near zero (or within a docking corridor)
- Relative velocity error near zero (or within a specified approach speed)
- Optional intermediate constraints, like staying outside a keep-out box
To make this concrete, suppose the chaser must reach a relative position of \(r_f=[0,0,0]^T\) and relative velocity \(v_f=[0,0,0]^T\) at time \(t_f\). With linear dynamics, these become equations that relate the control history to terminal state. With finite thrust, you rarely solve for a perfect match; instead you solve for a control that minimizes a weighted terminal error while keeping accelerations within limits.
Feedforward Shaping with Finite-Burn Inputs
A clean approach is to compute a feedforward acceleration profile that would achieve the desired terminal state under the assumed model. For linear dynamics, you can represent the control as piecewise constant over \(N\) intervals. Let \(u_k\) be the acceleration command during interval \([t_k,t_{k+1})\). Then the discrete-time dynamics produce a linear relationship:
- Terminal state equals a function of initial state and the stacked control vector \([u_0, u_1, …, u_{N-1}]\)
You then solve a constrained least-squares problem: minimize terminal error while enforcing thrust bounds \(|u_k| \le a_{max}\). A slightly playful but useful rule: if you can’t explain how the constraints enter the solve, you probably won’t implement them correctly.
Feedback to Handle Model Mismatch
Feedforward alone assumes the model is perfect. In reality, drag, gravity harmonics beyond the truncation, and small frame errors perturb the motion. A standard integrated practice is to add feedback around the shaped trajectory.
Define desired relative trajectories \(r_d(t), v_d(t)\) from the feedforward plan. Then command acceleration as:
- \(u(t)=u_{ff}(t)+K_p(r_d(t)-r(t))+K_v(v_d(t)-v(t))\)
Choose gains so the closed-loop system damps errors without demanding impossible thrust. If you use the same local frame for both the feedback errors and the dynamics model, you avoid a surprising amount of confusion.
Impulsive Versus Finite-Burn Shaping
Impulsive delta-v planning is convenient: you compute a delta-v that achieves a target state at a maneuver time. But finite-burn shaping is what you actually fly. A practical bridge is to approximate a finite burn as an equivalent impulse when the burn duration is short relative to the rendezvous timescale, then refine using numerical propagation.
Example: if you plan an impulsive correction \(\Delta v\) at \(t_m\), you can implement it as a finite acceleration \(a=\Delta v/\Delta t\) over a burn window \(\Delta t\). After that, re-propagate with the full finite-burn model and adjust the timing or magnitude if terminal errors exceed tolerance.
Implementation Checklist for Relative Control
- Use one frame for relative state, errors, and acceleration commands.
- Discretize time consistently with your thrust update rate.
- Enforce saturation on acceleration magnitude, not just on each component.
- Validate by propagating with the same dynamics used in guidance design, then with a higher-fidelity model.
- Check terminal errors and also intermediate constraints, not only the final point.
Example: Shaping a Simple Terminal Rendezvous
Assume a linear relative model and a 2D planar rendezvous where only \(x\) and \(y\) matter. Choose a 10-step piecewise-constant acceleration profile. Solve for \(u_k\) that minimizes:
- \(|r(t_f)-r_f|^2 + \lambda|v(t_f)-v_f|^2\)
subject to \(|u_k|\le a_{max}\). After solving, add feedback gains \(K_p, K_v\) and run a closed-loop simulation with small initial state errors. If the terminal errors shrink reliably without saturating thrust for long periods, the shaping and control inputs are doing their job.
The overall theme is simple: guidance shapes the motion using a model-based input plan, and control makes it robust by correcting the inevitable mismatch. When both are consistent in frame, timing, and constraints, relative trajectory shaping becomes a predictable engineering task rather than a guessing game.
10.5 Practical Example Computing a Rendezvous Trajectory with Constraints
Rendezvous guidance usually starts with a reference orbit and a relative-motion model, then turns constraints into numbers you can actually check. Here’s a systematic workflow for a planar rendezvous using linear relative motion, with constraints enforced during trajectory construction.
Step 1: Define the Scenario and Reference Orbit
Assume the chief is in a circular low Earth orbit with mean motion \(n\). The deputy starts with a relative position and velocity in the local-vertical local-horizontal (LVLH) frame: \(\mathbf{r}_0=[x_0; y_0; z_0]^T\), \(\mathbf{v}_0=[\dot x_0; \dot y_0; \dot z_0]^T\). For a planar example, set \(z_0=\dot z_0=0\).
Pick a target time \(t_f\) and a desired final relative state \(\mathbf{r}_f\) and \(\mathbf{v}_f\). A common choice is \(\mathbf{r}_f=[0;0;0]^T\) and \(\mathbf{v}_f=[0;0;0]^T\), meaning “dock-ready” in relative coordinates.
Step 2: Choose a Relative Motion Model
For a circular reference orbit, use Hill–Clohessy–Wiltshire equations. In the in-plane (x-y) components, the state transition from \(t=0\) to \(t=t_f\) can be written as linear functions of initial conditions and the effect of control inputs. In practice, you’ll use the standard closed-form mapping for free drift and then add impulsive corrections.
A practical constraint-driven approach is: design a two-impulse rendezvous (one at \(t=0\), one at \(t=t_f\)) so that the drift between impulses lands at the target. This keeps the math compact and the checks explicit.
Step 3: Convert Constraints into Design Variables
Let the deputy apply two small impulses \(\Delta\mathbf{v}_1\) at \(t=0\) and \(\Delta\mathbf{v}_2\) at \(t=t_f\). The impulses change the initial and final relative velocities:
- \(\mathbf{v}_0^+ = \mathbf{v}_0 + \Delta\mathbf{v}_1\)
- \(\mathbf{v}_f^- = \mathbf{v}_f - \Delta\mathbf{v}_2\) (so that after the second impulse, \(\mathbf{v}_f\) is achieved)
Now enforce constraints:
- Terminal position tolerance: \(|\mathbf{r}(t_f)-\mathbf{r}_f| \le \epsilon_r\)
- Terminal velocity tolerance: \(|\mathbf{v}(t_f)-\mathbf{v}_f| \le \epsilon_v\)
- Impulse magnitude limits: \(|\Delta\mathbf{v}*1| \le \Delta v*{1,max}\), \(|\Delta\mathbf{v}*2| \le \Delta v*{2,max}\)
- Keep-out region: for example, require \(|y(t)| \ge y_{min}\) for \(0 \le t \le t_f\) if the keep-out is along the along-track axis.
The keep-out check is where many “paper rendezvous” plans fail, so we treat it as a first-class constraint.
Step 4: Compute the Impulses Using Linear Mapping
For the planar case, solve for \(\Delta\mathbf{v}_1\) and \(\Delta\mathbf{v}_2\) so the drift dynamics satisfy the terminal tolerances. A clean way is to express the relative state at \(t_f\) as: \[ \mathbf{r}(t_f)=\mathbf{A}_r\mathbf{r}_0+\mathbf{B}_r\mathbf{v}_0^+, \quad \mathbf{v}(t_f)=\mathbf{A}_v\mathbf{r}_0+\mathbf{B}_v\mathbf{v}_0^+. \] Then impose \(\mathbf{r}(t_f)\approx \mathbf{r}_f\) and \(\mathbf{v}(t_f)\approx \mathbf{v}_f\) to determine the required \(\mathbf{v}_0^+\). Once \(\mathbf{v}_0^+\) is known, compute \(\Delta\mathbf{v}_1=\mathbf{v}_0^+-\mathbf{v}_0\). The second impulse is then \(\Delta\mathbf{v}_2=\mathbf{v}_f-\mathbf{v}(t_f^- )\), where \(\mathbf{v}(t_f^- )\) is the velocity just before the second impulse.
If you want to keep the plan feasible under impulse limits, you can treat \(t_f\) as a tuning knob: longer \(t_f\) often reduces required \(\Delta v\) but can violate keep-out constraints.
Step 5: Enforce Keep-Out Region with a Time-Grid Check
After computing impulses, propagate the relative motion with the two impulses applied. Evaluate the keep-out condition on a time grid (e.g., 50–200 points across \([0,t_f]\)). Because the model is analytic between impulses, you can also check the minimum of the relevant coordinate by inspecting the closed-form expression, but a grid is usually enough for a first design pass.
If the keep-out is violated, adjust \(t_f\) or relax the terminal tolerances and re-solve. This is not “trial and error” in the hand-wavy sense; it’s constraint satisfaction using a small set of controlled parameters.
Step 6: Concrete Numerical Example with Simple Numbers
Let \(n=0.0011,\text{rad/s}\). Choose \(t_f=5400,\text{s}\). Initial planar relative state:
- \(x_0=200,\text{m},; y_0=500,\text{m}\)
- \(\dot x_0=0,\text{m/s},; \dot y_0=-0.05,\text{m/s}\) Target:
- \(x_f=0,; y_f=0\)
- \(\dot x_f=0,; \dot y_f=0\) Constraints:
- \(\epsilon_r=5,\text{m}\), \(\epsilon_v=0.005,\text{m/s}\)
- \(\Delta v_{1,max}=0.12,\text{m/s}\), \(\Delta v_{2,max}=0.12,\text{m/s}\)
- Keep-out: \(|y(t)| \ge 120,\text{m}\)
Solve the linear terminal conditions to obtain \(\mathbf{v}_0^+\), then compute \(\Delta\mathbf{v}_1\). With the resulting drift, compute \(\Delta\mathbf{v}_2\). Finally, propagate and check \(|y(t)|\). If \(|y(t)|\) dips below 120 m, increase \(t_f\) slightly (for example, to 5700 s) and repeat. In many planar cases, this shifts the along-track timing so the trajectory “passes the gate” while still meeting the terminal tolerances.
Mind Map: The Rendezvous Constraint Workflow
This example shows the core idea: build a trajectory from a model you can write down, then treat constraints as equations and checks you run every time you change a design parameter.
11. Space Navigation Systems and Measurement Geometry
11.1 Navigation Architectures for Spacecraft Tracking
Spacecraft tracking systems turn raw measurements into navigation products like position, velocity, and time corrections. The architecture describes how data flows from sensors to estimators, how timing is handled, and where modeling choices live. A good architecture is mostly about avoiding mismatches: between time tags and light-time, between coordinate frames, and between what the estimator assumes and what the sensor actually measures.
Core Building Blocks
A tracking architecture typically has five roles.
- Sensors and measurement generation: ground antennas, onboard receivers, or inter-satellite links produce observables such as range, range-rate (Doppler), and angles.
- Time and frequency handling: clocks, time transfer, and frequency standards define the time tags and the conversion from signals to physical units.
- Measurement modeling: mapping from spacecraft state to predicted observables includes propagation, Earth orientation, and light-time.
- Estimation engine: filters or batch solvers adjust the state and nuisance parameters to best match measurements.
- Product formatting: outputs are delivered as state vectors, covariance, and sometimes bias parameters for downstream guidance.
A practical best practice is to write down the measurement model first, then decide which estimator fits it. If the model includes light-time and Earth orientation, the estimator must be consistent about those assumptions.
Tracking Geometry and Data Flow
Tracking geometry governs observability. For example, a station that only measures angles with little range information can leave radial distance weakly constrained, so the estimator leans heavily on the assumed dynamics. Conversely, range and Doppler from multiple stations improve the ability to separate position and velocity.
A systematic data flow looks like this:
- Schedule: choose when stations track and which observables are collected.
- Preprocess: validate timestamps, remove obvious outliers, and convert raw outputs into standardized measurement types.
- Predict: propagate a reference trajectory and compute predicted observables at the measurement epochs.
- Update: estimate corrections using residuals between observed and predicted values.
- Iterate: refine the trajectory and repeat until residuals behave like noise.
A slightly playful rule of thumb: if residuals show a pattern, it’s usually not the spacecraft being “mysterious”; it’s the model being incomplete or the timing being off.
Measurement Types and Their Architectural Implications
Different observables push different architectural choices.
- Two-way range and Doppler: common for ground tracking; requires careful handling of turnaround ratios and transponder delays.
- One-way links: simpler in concept but can be sensitive to clock biases and propagation delays.
- Angles: depend strongly on station coordinates, Earth orientation parameters, and antenna pointing models.
Best practice: treat each measurement type as a separate module with its own validation checks. For instance, angle residuals that correlate with elevation often point to a pointing or refraction model issue.
Estimation Modes
Architectures usually fall into two estimation modes.
- Batch estimation uses a time window of measurements and solves for the state that best fits all data at once. It handles correlations well but needs more computation and memory.
- Sequential estimation updates the state as each measurement arrives. It is efficient and supports real-time operations, but it relies on correct tuning of process noise and measurement noise.
A useful integrated practice is to run a short batch “sanity check” on the same data used by a sequential filter. If the batch solution disagrees significantly, the sequential tuning or linearization assumptions likely need adjustment.
Mind Map: A Typical Tracking Architecture
Example Architecture Walkthrough
Consider a ground-based tracking scenario where a spacecraft is observed by two stations over a pass. The system collects range and Doppler from both stations and angles from one station.
- Schedule: define measurement epochs every 10 seconds for range and Doppler, and every 30 seconds for angles.
- Preprocess: convert raw correlator outputs into meters and meters per second, and verify that time tags are consistent with the station clock.
- Predict: propagate an initial orbit estimate to each epoch, compute station-to-spacecraft geometry, and apply light-time so the predicted observables correspond to the signal emission time.
- Update: run a sequential estimator that updates the state with range and Doppler at 10-second intervals, and incorporates angles when available.
- Validate: check residuals per observable type. If Doppler residuals drift with time while range residuals remain small, the dynamics model or transponder delay handling is likely inconsistent.
A concrete best practice is to log residuals separately for each station and each observable. That makes it easier to spot whether the issue is station-specific (e.g., pointing) or model-wide (e.g., dynamics or timing).
Architectural Consistency Checks
Before trusting navigation outputs, the architecture should enforce consistency.
- Frame consistency: ensure station coordinates and spacecraft states use compatible Earth-fixed or inertial definitions.
- Time consistency: confirm that the estimator’s epochs match the measurement model’s light-time convention.
- Noise consistency: verify that assumed measurement noise matches observed residual spread.
When these checks pass, the estimator can focus on real information content rather than compensating for preventable mismatches.
11.2 Ground Station Geometry and Visibility Constraints
Ground station geometry is the practical bridge between orbital dynamics and real tracking. Even if your orbit model is perfect, you only get useful measurements when the spacecraft is above the station’s horizon and within the receiver’s pointing and link limits. This section builds the logic from geometry basics to the constraints you actually enforce in scheduling.
Core Geometry
A ground station is fixed on Earth, so its position in an Earth-fixed frame is constant. The spacecraft position is computed in an inertial frame, then rotated into the same Earth-fixed frame at the observation time. Visibility is determined by the relative direction from the station to the spacecraft.
The key angle is the elevation angle, usually defined as the angle between the local horizon plane and the line of sight. If elevation is too low, the signal path passes through more atmosphere, antenna gain drops, and multipath effects increase. A typical minimum elevation might be 10–20 degrees, but the exact value depends on link budget and antenna pattern.
Mind Map: Ground Station Geometry and Visibility Constraints
Horizon and Earth Occultation
A spacecraft can be geometrically blocked by Earth even if it is “above” the station in some loose sense. The clean way to test this is to check whether the line of sight intersects the Earth’s solid surface (or a chosen Earth radius model). If it does, the spacecraft is occulted and cannot be tracked.
A simple approach uses the station position vector \(\mathbf{r}_s\) and spacecraft position vector \(\mathbf{r}_c\) in Earth-fixed coordinates. The line-of-sight direction is \(\mathbf{\rho}=\mathbf{r}_c-\mathbf{r}_s\). If the minimum distance from Earth’s center to the line segment is less than the Earth radius (or an effective radius including atmospheric margin), the path is blocked.
Example: Quick Occultation Check
Assume Earth radius \(R=6378\) km. Let a station be at \(| \mathbf{r}_s|=6378\) km (sea level). If the spacecraft is at \(| \mathbf{r}_c|=7000\) km and the elevation is negative, the line of sight almost certainly intersects Earth. In practice, you compute the exact geometry rather than relying on elevation sign alone, because elevation thresholds and Earth radius models can differ.
Elevation Angle and Minimum Thresholds
Once occultation is excluded, elevation determines whether the antenna can see the spacecraft. Compute a local topocentric frame at the station: up (radial), east, and north directions. The elevation angle is then derived from the component of the line-of-sight vector along the up direction.
A minimum elevation threshold \(e_{\min}\) is applied to reduce atmospheric loss and improve measurement quality. If you use range and Doppler tracking, low elevation can also degrade Doppler stability due to tropospheric effects and antenna pointing errors.
Example: From Elevation to Pass Windows
Suppose you simulate a pass and find elevation crosses \(10^\circ\) at 14:02:10 UTC and drops below \(10^\circ\) at 14:18:40 UTC. Your visibility window is the interval where elevation \(\ge 10^\circ\), but you still need to check pointing and link constraints. If the antenna has a slew limit, you might shorten the window by excluding the first and last few minutes where tracking quality is marginal.
Additional Visibility Constraints
Elevation and occultation are necessary but not sufficient. Real scheduling often includes:
- Antenna pointing limits: azimuth and elevation ranges, plus slew rate constraints. Even if the spacecraft is visible, the antenna might not be able to track it continuously.
- Receiver and link limits: minimum signal-to-noise ratio, maximum range, and allowable Doppler bandwidth. These depend on transmitter power, antenna gain, system noise temperature, and modulation/coding choices.
- Operational constraints: station maintenance windows, frequency planning, and handover rules between stations.
A practical best practice is to treat these constraints as filters applied after the geometric candidate windows are found. That keeps the computation efficient and the logic easy to debug.
Systematic Scheduling Workflow
A robust workflow for generating pass windows looks like this:
- Compute station and spacecraft positions in a common Earth-fixed frame at candidate times.
- Evaluate occultation using an Earth radius model and line-of-sight intersection logic.
- Compute elevation angle from the topocentric up direction.
- Apply \(e_{\min}\) and antenna pointing limits.
- Apply link and Doppler constraints using predicted range and line-of-sight velocity.
- Output continuous visibility intervals with metadata such as minimum elevation, maximum range, and predicted Doppler.
Example: Filtering Order That Saves Time
If you apply link budget checks at every time step across a full day, you waste effort on times when the spacecraft is occulted. Instead, first find candidate times where elevation is above a loose threshold (or where occultation is false), then run the more expensive link checks only inside those candidate windows.
Mind Map: Constraint Logic
Ground station visibility is therefore a layered decision: geometry first, then thresholds, then operational constraints. When you structure it this way, your scheduling becomes both faster and easier to validate, because each filter has a clear physical meaning.
11.3 Dilution of Precision Concepts for Space Measurements
Dilution of Precision (DOP) describes how measurement geometry turns a given measurement noise level into uncertainty in the estimated state. In plain terms: the same sensor noise can produce very different orbit errors depending on where the spacecraft is relative to the observer and how the measurements are arranged in time.
Core Idea from Geometry to Uncertainty
Start with a linearized measurement model:
- Measurement residual: \(\mathbf{y} \approx \mathbf{H},\Delta\mathbf{x} + \mathbf{v}\)
- \(\mathbf{H}\) is the sensitivity (Jacobian) of measurements to the state \(\mathbf{x}\)
- \(\mathbf{v}\) is measurement noise with covariance \(\mathbf{R}\)
For a weighted least squares estimator, the state covariance is approximately
\[\mathbf{P}_{x} \approx (\mathbf{H}^T\mathbf{R}^{-1}\mathbf{H})^{-1}.\]
DOP is a geometry-only scaling of this idea. If you factor \(\mathbf{R}\) into a typical measurement variance and a unitless geometry term, you get a matrix that depends mainly on \(\mathbf{H}\). Large DOP means \(\mathbf{H}^T\mathbf{R}^{-1}\mathbf{H}\) is poorly conditioned: small measurement noise creates large state uncertainty.
Mind Map: DOP Concepts
Dilution of Precision Mind Map
From DOP to Specific Metrics
DOP is often reported as a scalar derived from the state covariance. Common choices include:
- Position DOP: scales uncertainty in the three position components.
- Velocity DOP: scales uncertainty in velocity components.
- Directional DOP: uncertainty along a particular axis, such as the line-of-sight direction.
A typical workflow is:
- Compute \(\mathbf{H}\) for the current predicted state.
- Use \(\mathbf{R}\) from sensor specs.
- Form \(\mathbf{P}_x\approx(\mathbf{H}^T\mathbf{R}^{-1}\mathbf{H})^{-1}\).
- Convert \(\mathbf{P}_x\) into a scalar DOP by taking appropriate traces or diagonal terms.
The exact scalar definition varies by implementation, but the interpretation stays consistent: DOP is a geometry multiplier on baseline measurement noise.
Why Geometry Matters: A Concrete Example
Consider two tracking passes for the same spacecraft and sensor noise level.
- Pass A: observations occur when the spacecraft is near the observer’s local horizon. The line-of-sight direction changes rapidly with time, and angles provide strong leverage on cross-range position.
- Pass B: observations occur when the spacecraft is nearly overhead and motion relative to the observer is mostly radial. Angle measurements change slowly, so they contribute less information about tangential position.
In Pass A, \(\mathbf{H}\) tends to have better rank and stronger sensitivity to multiple state directions. In Pass B, \(\mathbf{H}\) becomes close to singular for some combinations of position components, so \(\mathbf{P}_x\) inflates even if \(\mathbf{R}\) is unchanged.
A useful mental check: if all measurements mostly constrain the same geometric direction, the estimator can’t independently determine the orthogonal components.
Measurement Types and Their Geometric Roles
Different measurements “see” geometry differently:
- Range constrains the state mainly along the line of sight.
- Angles constrain cross-range directions, but only when the line of sight rotates appreciably.
- Doppler constrains range rate, which depends on the projection of velocity onto the line of sight.
This is why mixing measurement types can reduce DOP. Range gives a strong radial anchor, angles improve transverse separation, and Doppler helps with velocity observability.
Scheduling Observations to Reduce DOP
DOP is not just a property of a single epoch; it depends on the set of measurements used together. Two practical scheduling principles follow directly from the covariance expression:
- Avoid redundant geometry: if successive measurements have nearly the same \(\mathbf{H}\) directions, the information gain is small.
- Use time diversity: spacing observations so that the line of sight changes helps \(\mathbf{H}\) span more state directions.
A simple example is choosing observation windows that include both early and late times around closest approach, rather than taking all measurements at one instant.
Interpreting DOP Without Getting Lost
High DOP does not mean the estimator is “wrong”; it means the data cannot uniquely determine the state well under the current geometry and weighting. Low DOP means the measurement set provides strong, well-conditioned information.
When you compute DOP, also check whether the underlying information matrix is ill-conditioned. If it is, the resulting large uncertainties may concentrate in specific state combinations, not necessarily all components equally. That’s where directional DOP or examining \(\mathbf{P}_x\) diagonal terms helps you understand which parts of the state are weakly observed.
Summary
Dilution of Precision connects measurement geometry to state uncertainty through the sensitivity matrix and noise weighting. By analyzing \(\mathbf{H}\), \(\mathbf{R}\), and the resulting covariance, you can predict when tracking will yield tight orbit estimates and when it will struggle—then choose measurement timing and types to improve observability.
11.4 Time Tagging and Light Time Effects in Observation Models
Accurate navigation starts with a boring truth: the time you attach to a measurement is as important as the measurement itself. In space tracking, the signal does not travel instantly, so the receiver records a time that corresponds to an earlier emission event. Observation models must therefore connect three times: transmit time, receive time, and the spacecraft state time used in propagation.
Mind Map: Time and Light Time Modeling
Measurement Time Definitions That Actually Matter
A ground station typically time-tags the event when it receives a signal, using its onboard clock disciplined to a time scale. The observation model, however, needs the spacecraft position at the moment the signal was emitted. Let \(t_r\) be the receive time at the station and \(t_t\) the transmit time at the spacecraft. The light time \(\tau\) satisfies \(t_r = t_t + \tau\).
The key modeling decision is what \(\tau\) depends on. In the simplest vacuum model, \(\tau\) is the signal travel time along the line from spacecraft to station at the emission moment. That means \(\tau\) depends on the spacecraft state at \(t_t\), which is unknown until you solve the light-time equation. This circular dependency is why light-time computation is usually iterative.
Light Time Geometry and the Iteration Loop
Define station position \(\mathbf{r}_s(t_r)\) in an inertial frame and spacecraft position \(\mathbf{r}_c(t_t)\). The geometric light time is
\[ \tau = \frac{|\mathbf{r}_s(t_r) - \mathbf{r}_c(t_t)|}{c} \]
Because \(t_t = t_r - \tau\), you solve for \(t_t\) by iteration:
- Guess \(\tau^{(0)}\) using a rough range, often from a prior orbit or a straight-line estimate.
- Compute \(t_t^{(0)} = t_r - \tau^{(0)}\).
- Propagate the spacecraft to \(t_t^{(0)}\) and recompute \(\tau^{(1)}\).
- Repeat until \(|\tau^{(k+1)} - \tau^{(k)}|\) is below a tolerance.
A practical tolerance might be on the order of nanoseconds for high-precision ranging, but the right choice depends on your measurement noise and required filter consistency.
Time Scales and Frame Consistency
Even if you solve the light-time equation perfectly, you can still get wrong predictions if time scales and frames are mixed. The station clock time must be mapped to the time scale used by your ephemeris and propagator. Likewise, both station and spacecraft positions must be expressed in the same inertial frame when computing \(|\mathbf{r}_s - \mathbf{r}_c|\).
A simple best practice is to treat time conversion and frame transformation as explicit steps with unit tests. For example, verify that a known ephemeris state at a reference epoch transforms to the expected inertial coordinates, and verify that your time conversion preserves ordering and monotonicity.
Predicted Observables with Light Time Applied
Once you have \(t_t\) and the spacecraft state at that epoch, you can compute predicted measurements.
- One-way range: \(\rho = |\mathbf{r}_s(t_r) - \mathbf{r}_c(t_t)|\).
- Line-of-sight unit vector: \(\hat{\mathbf{u}} = (\mathbf{r}_s - \mathbf{r}_c)/\rho\), evaluated at the appropriate times.
- Doppler: Doppler depends on relative line-of-sight velocity, which again must be consistent with the light-time-corrected geometry.
For Doppler, a common mistake is to use velocities at \(t_r\) for both bodies. The spacecraft velocity should correspond to the emission epoch \(t_t\), while the station velocity corresponds to the receive epoch \(t_r\). That mismatch can create systematic residuals that look like “mysterious bias” in estimation.
Example: Ranging with Iterative Emission Time
Suppose a station receives a ranging signal at \(t_r\). You start with a prior orbit and compute an initial range \(\rho^{(0)}\). Then \(\tau^{(0)} = \rho^{(0)}/c\) and \(t_t^{(0)} = t_r - \tau^{(0)}\).
You propagate the spacecraft to \(t_t^{(0)}\), recompute \(\rho^{(1)}\), and update \(t_t^{(1)}\). After a few iterations, the change in \(t_t\) becomes tiny. At that point, you compute the final predicted range \(\rho\) and compare it to the measured value.
A good sanity check is to log the iteration history. If the light-time solution oscillates or diverges, it usually means the initial guess is too poor, the propagator is inconsistent, or the station position is not expressed in the same frame.
Error Sources and How They Show Up in Residuals
Clock offsets produce residuals that correlate with measurement time. Frame or time-scale mismatches often create residual patterns that depend on geometry, because the light-time correction changes with relative position. Neglecting relativistic corrections can be acceptable for some low-precision cases, but when residuals remain structured after model tuning, it’s a sign that the observation model is missing terms that are small but systematic.
A final best practice is to keep the observation model modular: compute light time, compute geometry, then compute the observable. When something goes wrong, modularity makes it obvious whether the issue is in time tagging, propagation, or measurement mapping.
11.5 Practical Example Building a Measurement Schedule for Orbit Updates
A measurement schedule is a plan for when to collect tracking data and how to map each measurement to a navigation update. The goal is simple: maximize information about the state while respecting geometry, timing, and computation limits. The schedule is built from three ingredients: (1) a propagation model, (2) a measurement model, and (3) a selection rule based on measurement quality.
Step 1: Define the Update State and Propagation Baseline
Start with an initial estimated state at an epoch, for example on 2026-02-05, and choose a propagation model consistent with the rest of the system. If you will later estimate drag or gravity harmonics, include them in the propagation used to predict measurements; otherwise the filter will fight model mismatch.
Practical best practice: decide the state vector before scheduling. A common choice is position and velocity in an inertial frame plus optional parameters (e.g., drag coefficient). If you include parameters, you must ensure the schedule excites them; otherwise they become weakly observable.
Step 2: Specify Measurement Types and Their Noise
For a typical deep-space or Earth-orbit navigation setup, you might use range, range-rate (Doppler), and angles (azimuth/elevation). Each measurement type has a different sensitivity to state components.
Use a simple noise model to start scheduling. For example:
- Range: standard deviation σρ (meters)
- Range-rate: standard deviation σṙ (m/s)
- Angles: standard deviation σθ (radians)
Best practice: keep the noise model conservative. Underestimating noise makes the schedule look better than it is and can lead to overconfident updates.
Step 3: Compute Predicted Measurement Geometry
For each candidate observation time, compute the predicted line-of-sight direction, expected range, and expected partial derivatives of the measurement with respect to the state. In practice, you can approximate this with a sensitivity matrix built from finite differences.
A key idea: measurement geometry drives observability. If the spacecraft is near zenith for a ground station, angles may be less informative about certain components, while range and Doppler may dominate.
Step 4: Build an Information Metric and Select Times
A common selection rule is to maximize the expected reduction in state uncertainty. In batch form, you can use the Fisher information idea:
- For each candidate measurement i, compute a measurement Jacobian Hi.
- Weight it by the inverse of the noise covariance Ri.
- Accumulate an information score such as trace of the resulting normal matrix.
Then choose a set of measurements that fits your downlink and processing budget.
Best practice: enforce diversity. Avoid selecting many measurements that are nearly redundant because they share the same geometry and time correlation.
Step 5: Account for Light Time and Time Tagging
If you use range and Doppler, the signal travel time matters. The schedule should be built using the transmit time that corresponds to each receive time, or equivalently using a consistent light-time model in the measurement prediction.
Concrete example: if you schedule at receive time tR, you must predict the spacecraft state at transmit time tT = tR − ρ/c. If you ignore this, the residuals will show a systematic bias that the filter may interpret as a state error.
Step 6: Validate with a Small End-to-End Simulation
Before committing to the schedule, run a short simulation: propagate a truth state, generate synthetic measurements at the scheduled times, and run a filter update. Check that residuals are consistent with the assumed noise and that the covariance shrinks in the expected directions.
If the filter diverges or covariance behaves oddly, revisit the schedule selection metric, the noise model, or the propagation fidelity.
Mind Map: Measurement Schedule Workflow
Example: Two Stations with Mixed Measurements
Assume two ground stations A and B track a satellite during a 90-minute pass. Station A is visible for the first 45 minutes; station B for the last 45 minutes, with overlap in the middle.
A practical schedule might choose:
- Early pass: range and Doppler from station A to constrain radial motion.
- Mid overlap: add angles from both stations to improve cross-track geometry.
- Late pass: prioritize Doppler from station B to refine along-track velocity.
Selection logic: if the overlap provides better angular sensitivity, you place angle measurements there; if one station has poor elevation angles at the edges, you reduce reliance on angles and lean on range/Doppler.
Example: Finite-Difference Sensitivity for Scheduling
To compute sensitivity at a candidate time, perturb the state components by small amounts and recompute predicted measurements. Use consistent scaling so that position and velocity perturbations produce comparable changes in predicted observables.
A simple workflow:
- Choose perturbations Δx for each state component.
- For each component j, compute h(x+Δxj) and h(x−Δxj).
- Approximate Hj ≈ (h+ − h−)/(2Δxj).
Then build the information score using Hj and the measurement noise covariance.
Practical Checklist Before You Freeze the Schedule
- The schedule uses the same propagation and measurement models as the filter.
- Light time is handled consistently for range and Doppler.
- Noise assumptions are conservative and measurement units are consistent.
- Measurement geometry is diverse across the selected set.
- A short truth-to-estimate test shows residuals consistent with noise and covariance shrinkage.
12. Validation Workflows and End to End Case Studies
12.1 Verification of Dynamics Models Against Benchmarks
Verification answers a simple question: “If I simulate this physics, do I get the same answers as trusted references under controlled conditions?” The trick is to make the conditions controlled enough that disagreements point to a specific modeling choice rather than to random numerical noise.
Verification of Dynamics Models Against Benchmarks
Step 1: Define Benchmark Scope
Start by stating what you are verifying, not what you hope to verify. For orbital dynamics, scope usually includes: (1) the force model set (e.g., two-body only, plus J2, plus drag), (2) the coordinate frames (inertial vs Earth-fixed), and (3) the time scale used for propagation and observation modeling.
A practical scope statement looks like this: “Verify that the propagator reproduces two-body motion for 10 orbits with position error below 10 meters when using double precision and a fixed step size.” That single sentence forces you to define the accuracy target and the regime.
Step 2: Select Reference Types
Use a hierarchy of references so you can localize errors.
- Analytic solutions: Two-body motion provides closed-form truth for position and velocity when you use consistent orbital elements and anomaly conversions.
- High-fidelity numerical truth: For perturbed cases, generate a reference using tighter tolerances, smaller steps, and a more complete force model than the one under test.
- Measurement-based truth: When you compare to tracking data, you must also verify the measurement model and time tagging, not only the dynamics.
A good rule: if you cannot explain the reference’s assumptions, you cannot trust the verification.
Step 3: Build a Test Matrix
Verification becomes systematic when you vary one thing at a time.
- Nominal cases: circular and moderately eccentric orbits, low to moderate inclinations, and typical altitude ranges.
- Edge cases: near-circular but with small eccentricity to stress element conversions, highly inclined orbits to stress J2 effects, and perigee passages where drag changes rapidly.
- Parameter sweeps: vary one parameter such as ballistic coefficient, J2 magnitude, or thrust magnitude while holding everything else constant.
Example test matrix entries:
- Two-body: e = 0.001, 0.1, 0.7; inclinations 0°, 45°, 98°.
- J2-only: same set, compare secular rates of RAAN and argument of perigee.
- Drag-only: two ballistic coefficients differing by 10×, compare decay of semi-major axis.
Step 4: Compare Outputs with Meaningful Metrics
Do not rely on a single number. Compare both raw states and derived quantities.
- State errors: position and velocity norms at fixed epochs.
- Orbital element drift: secular changes in RAAN, argument of perigee, and mean anomaly.
- Conservation checks: for two-body, specific mechanical energy and angular momentum magnitude should remain constant up to numerical tolerance.
For two-body verification, a clean metric is the maximum position error over the propagation window, plus the maximum drift in specific energy. If energy drifts but position error is small, you likely have a numerical issue that will surface in longer runs.
Step 5: Diagnose Discrepancies
When results disagree, use a short diagnostic ladder.
- Frame mismatch: inertial vs Earth-fixed confusion often shows up as a consistent rotation-like error.
- Time-scale mismatch: mixing UTC-like time tags with dynamical time can shift Earth orientation and observation geometry.
- Truncation limits: if you use spherical harmonics, confirm that the truncation degree/order matches the reference.
- Integrator behavior: compare step sizes and tolerances; if errors scale with step size, the issue is numerical rather than physical.
- Linearization limits: if you use variational equations or linearized observation models, verify them against finite differences.
Example: Two-Body Verification Workflow
Propagate an orbit using your force model set to gravity only. Compute a reference using the same initial state converted into orbital elements, then propagate using the analytic two-body solution.
- Run with step sizes h and h/2.
- Compute max position error over 10 orbits.
- Check energy drift.
If halving the step size reduces position error by roughly the expected order, your integrator is behaving. If energy drift does not improve, the issue is likely in force evaluation consistency or unit handling.
Step 6: Document Results for Traceability
Verification is complete when results are reproducible and tied to acceptance criteria.
Record: force model configuration, frame definitions, time scale, integrator settings, reference generation method, and the exact pass/fail thresholds. A short results table is enough, as long as it includes the metrics you used and the conditions under which they were computed.
| Test | Force Model | Reference Type | Metric | Threshold | Result | ||
|---|---|---|---|---|---|---|---|
| Two-body nominal | Central gravity | Analytic | max | r | error | 10 m | Pass |
| J2 secular | Central + J2 | High-fidelity | RAAN drift | 0.01 deg | Pass | ||
| Drag decay | Central + drag | High-fidelity | a(t) error | 50 m | Pass |
This structure turns “the simulation looks right” into evidence you can defend, reproduce, and use to pinpoint what to fix when it does not.
12.2 Consistency Checks for Units Frames and Time Scales
Consistency checks are the boring parts that save you from exciting bugs. The goal is simple: ensure every number in your pipeline is expressed in the same physical meaning—units, reference frames, and time scales—before you compare models, propagate states, or run estimation.
Mind Map: Consistency Checks
Units: Make Dimensions Behave
Start with dimensional analysis on every interface: state vectors, force models, observation models, and propagator inputs. If your state is in kilometers and seconds, then velocity is km/s, acceleration is km/s², and any gravitational acceleration computed from \(\mu\) must match those units.
A quick practice: pick one term and trace it end-to-end. For example, if you compute two-body acceleration as \(\mathbf{a}=-\mu\mathbf{r}/r^3\), then \(\mu\) must have units of length³/time². If \(\mu\) is provided in km³/s², then \(\mathbf{r}\) must be in km. If you accidentally feed meters, the acceleration becomes 10^9 times too large and your orbit determination will “work” only in the sense that it fails immediately.
Angles are another common trap. If your attitude or orbital elements use degrees, convert to radians before using trigonometric functions. Likewise, rates must match: if \(\dot{\theta}\) is in rad/s, do not treat it as deg/s.
Finally, verify gravitational parameter conventions. Some libraries use \(\mu\) in km³/s², others in m³/s². Your code can be correct and still be wrong if the unit system is inconsistent.
Frames: Verify Meaning, Not Just Math
A frame check is about physical interpretation. Your inertial state must be expressed in the inertial axes your dynamics model assumes. Your Earth-fixed state must align with the Earth rotation model and gravity field definition.
Use a transform chain audit: inertial \(\rightarrow\) Earth-fixed \(\rightarrow\) local orbital frame \(\rightarrow\) body frame. For each step, confirm:
- Axis definitions and handedness (right-handed vs left-handed).
- Rotation direction convention (active vs passive).
- Time dependence source (which time tag drives Earth rotation).
A practical identity test: if you set the rotation angle to zero, the transform should return the original vector exactly (within floating-point tolerance). Another test is round-trip consistency: transform a vector from frame A to frame B and back, then compute the norm of the difference. If the error is large, you likely swapped a transpose or used the wrong convention.
Example: Suppose your thrust direction is defined in the body frame, but your propagator expects acceleration in the inertial frame. The correct pipeline is \(\hat{u}*{inertial}=\mathbf{C}*{body\to inertial},\hat{u}*{body}\), then \(\mathbf{a}= (T/m),\hat{u}*{inertial}\). If you instead apply \(\mathbf{C}_{inertial\to body}\), the thrust points somewhere else and the filter will compensate by inventing state changes.
Time Scales: Use the Right Clock for Each Equation
Time consistency is where subtle errors hide. Dynamics often use a uniform time scale, while observation timestamps arrive in UTC. Many Earth rotation and ephemeris-related computations require specific time scales such as TT or TDB.
A systematic approach:
- Convert observation timestamps from UTC to the required internal time scale.
- Apply light-time corrections using the same time scale used in the signal model.
- Use the correct time argument for Earth rotation angle or Earth-fixed transformations.
- Ensure interpolation of ephemerides and attitude uses the same time base.
If you need a concrete reference date for a test vector, use 2026-02-15 as a placeholder in your unit tests. The exact date matters less than the fact that you run the same conversion path every time.
Cross-Checks: Catch Errors Before Estimation
Before running estimation, run invariants and sanity bounds.
- Dimensional check: confirm every computed quantity matches expected units.
- Magnitude bounds: Earth gravity acceleration near Earth should be on the order of \(\sim 10,\text{m/s}^2\) (or the equivalent in your unit system). If you see \(10^6\) times that, you have a scaling issue.
- Transform sanity: round-trip frame transforms should preserve vector norms.
- Energy or angular momentum trends: for a two-body test with no perturbations, the orbit should behave consistently with the chosen model.
Failure Modes and How to Spot Them
- Wrong units scaling: accelerations or residuals blow up by large factors.
- Swapped axes: transforms produce consistent-looking numbers that still lead to systematic residual patterns.
- UTC/TT confusion: residuals show time-correlated structure even when geometry seems correct.
- Mixed Earth-fixed conventions: ground station positions drift relative to expected visibility.
Consistency checks are not a one-time chore. Treat them like a gate: every new model term, frame definition, or time conversion function must pass the same tests, or it does not enter the estimation pipeline.
12.3 Sensitivity Analysis for Model Parameters and Initial Conditions
Sensitivity analysis answers a practical question: if your gravity model, drag model, or starting state is slightly wrong, how wrong does your predicted trajectory become? The goal is not to produce a single “most correct” answer, but to quantify which inputs matter most and where your modeling effort pays off.
Core Idea and What You Measure
Start by defining a scalar metric that summarizes trajectory error. Common choices include position error at a specific epoch, miss distance at closest approach, or along-track error over a time window. Then define a baseline simulation using your nominal parameters and initial conditions.
A sensitivity study perturbs one input at a time (local sensitivity) or perturbs many inputs together (global sensitivity). Local sensitivity is usually enough for orbit determination workflows because the estimation process already keeps parameters near plausible values.
Mind Map: Sensitivity Analysis for Model Parameters and Initial Conditions
Step 1: Define Inputs and Outputs
Pick a parameter vector \(\theta\) that includes both initial conditions \(x_0\) and model parameters \(p\). A clean partition helps interpretation: \(\theta = [x_0, p]\). Next, define the output metric \(g(\theta)\). For example, let \(g\) be the Euclidean position error at \(t_f\):
\(g(\theta)=|r(t_f;\theta)-r_{truth}(t_f)|\).
In orbit determination, you often replace \(r_{truth}\) with a reference trajectory from a higher-fidelity model or with the best available estimate. The key is consistency across perturbations.
Step 2: Choose a Perturbation Method
Finite differences are straightforward: perturb one component by \(\Delta\) and re-run the propagator. Use a symmetric difference when possible to reduce truncation error:
\(\frac{\partial g}{\partial \theta_i} \approx \frac{g(\theta+\Delta e_i)-g(\theta-\Delta e_i)}{2\Delta}\).
Variational equations can provide partial derivatives more efficiently, especially when you already propagate the state transition matrix. A good practice is to compare finite-difference sensitivities against variational-based sensitivities for a small set of parameters to validate your implementation.
Monte Carlo is useful when the system is nonlinear or when you expect large uncertainty. Keep the number of samples modest at first, then increase only if the sensitivity ranking changes.
Step 3: Select Perturbation Sizes That Mean Something
Perturbations should be large enough to overcome numerical noise but small enough to stay in the local linear regime. A practical rule is to start with perturbations equal to one standard deviation of your uncertainty model, or a fraction of it if you suspect strong nonlinearity.
Example: if your initial velocity uncertainty is 0.5 m/s and your drag ballistic coefficient uncertainty is 5%, test \(\Delta v=0.5,\text{m/s}\) and \(\Delta BC=5\%\). If doubling the perturbation doubles the metric change, you’re likely in a linear regime. If not, you need either smaller steps or a nonlinear approach.
Step 4: Compute Relative Sensitivities and Rank Influences
Raw derivatives can mislead because units differ. Use normalized sensitivity:
\(S_i = \left|\frac{\partial g}{\partial \theta_i}\right|\frac{\sigma_{\theta_i}}{g_0}\)
where \(\sigma_{\theta_i}\) is the uncertainty and \(g_0\) is the baseline metric. This turns “meters per meter” chaos into a comparable ranking.
Example interpretation: if \(S_{v_y}\) is 10× larger than \(S_{BC}\), then improving initial velocity knowledge yields more benefit than refining drag parameters for that scenario.
Step 5: Watch for Coupling and Nonlinear Effects
Coupling happens because parameters and initial conditions can trade off. A classic example is drag: a slightly different initial semi-major axis can mimic drag-induced energy loss over a short arc. To detect coupling, run two-parameter perturbations for the top-ranked candidates and compare the combined effect to the sum of individual effects.
If the combined effect is much larger than the sum, the system is nonlinear in that region. In that case, local sensitivity results should be treated as directional guidance rather than a precise ranking.
Step 6: Feed Results Back into the Modeling and Estimation Loop
Sensitivity analysis should change decisions. If a parameter is consistently low-impact, you can fix it to a nominal value to reduce estimation burden. If a parameter is high-impact, you either estimate it with appropriate priors or improve the measurement model that constrains it.
Example workflow for a drag-affected low Earth orbit:
- Compute sensitivities of along-track error over a 3-day arc to \(x_0\) and \(BC\).
- If \(BC\) dominates only after day two, consider using a shorter estimation window or a parameterization that captures time-varying drag behavior.
- If initial velocity dominates everywhere, prioritize better tracking geometry and time-tag accuracy since those directly constrain \(v\).
The final deliverable is a ranked list of influential inputs plus a short note on whether the ranking is stable under reasonable perturbation sizes. That stability check is what keeps the analysis honest.
12.4 End to End Pipeline From Propagation to Estimation
An end-to-end pipeline turns a physical model into a navigation solution. The core idea is simple: propagate a state forward, predict what sensors would measure, compare predictions to actual measurements, then update the state and repeat. The details matter because every mismatch—frames, time tags, units, and linearization—shows up as residual structure.
Mind Map: End-to-End Pipeline
Step 1: Define the State and Time Discipline
Start by stating what your state vector contains. A common choice is position and velocity in an inertial frame, plus optional parameters like drag coefficient or clock bias. Then lock down the time discipline: measurement times must map to the same time scale used by the propagator. A practical best practice is to store every time tag as a single scalar (e.g., seconds since an epoch) and keep a separate record of the epoch definition.
Example: Suppose tracking provides range and range-rate at 2026-02-08T12:00:00Z. Convert that timestamp into your propagator’s time variable once, then reuse it consistently for both propagation and measurement prediction.
Step 2: Propagate with a Model You Can Explain
Propagation integrates the equations of motion under your force model. The pipeline should treat the dynamics model as a modular component: gravity field truncation, atmospheric drag, solar radiation pressure, and thrust if applicable. Numerical integration must be configured so that step sizes are small enough to resolve maneuver boundaries and so that event detection triggers at the right times.
Best practice: include a “sanity mode” that runs the same initial condition through two integrators (e.g., a variable-step method and a fixed-step method) and compares state differences at the measurement epochs. If the differences are larger than your expected uncertainty growth, you have a numerical problem, not a filtering problem.
Step 3: Predict Measurements from the Propagated State
Measurement prediction maps the propagated state to predicted observables. For ground-based tracking, this typically involves transforming the spacecraft state into the sensor frame, computing line-of-sight geometry, and applying light-time corrections if the measurement model includes them.
A clean workflow is:
- Transform spacecraft state from inertial to Earth-fixed at the signal transmission time.
- Compute station position in the same frame.
- Form range and range-rate using relative geometry.
- Apply any model-specific corrections (e.g., Earth rotation effects already embedded in the frame transform, or explicit light-time iteration).
Example: For range-rate, compute the relative velocity projected onto the line of sight. If you accidentally project onto a line-of-sight computed at the reception time instead of the transmission time, residuals often show a smooth bias pattern rather than random scatter.
Step 4: Linearize Carefully and Keep the Jacobians Honest
Most estimators rely on linearization of the observation model around the current state estimate. That means you need measurement Jacobians with respect to the state. A practical approach is to compute Jacobians analytically when feasible, but validate them with finite differences.
Best practice: use a finite-difference step size tied to your state scaling. If position components are in meters and velocity in meters per second, use perturbations that produce numerically stable changes in predicted measurements.
Step 5: Update the State and Covariance
With predicted measurements and Jacobians, compute the innovation (measurement minus prediction) and apply the update. In a Kalman-style update, the covariance update must be consistent with the linearization quality. If the filter repeatedly over-trusts the model, covariance will shrink too fast and residuals will remain structured.
Example: If drag is included in propagation but omitted in the measurement Jacobian sensitivity, the filter may “explain away” drag effects by adjusting initial conditions, leading to a covariance that looks confident while residuals show systematic trends.
Step 6: Validate Using Residual and Innovation Structure
Validation is not a single check; it’s a set of checks that target different failure modes.
- Residual whiteness: residuals should look uncorrelated over time for correctly modeled noise.
- Innovation statistics: the innovation normalized by its predicted covariance should behave like a unit-variance process.
- Consistency across arcs: if you run the pipeline over multiple time windows, the estimated uncertainty should grow in a predictable way.
Mind map of validation focus:
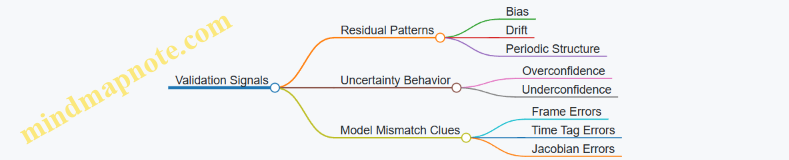
Step 7: Close the Loop with a Repeatable Workflow
An end-to-end pipeline becomes reliable when it is repeatable. Use a fixed sequence: propagate to each measurement epoch, predict measurements, compute innovations and Jacobians, update state and covariance, then move to the next epoch. Log intermediate quantities like frame transforms, predicted measurement components, and innovation norms so that when something goes wrong, you can pinpoint whether the issue is in propagation, prediction, or the update.
Example: If a single station pass produces a spike in innovation norms, check whether the spike aligns with a frame transformation boundary, a maneuver event, or a change in measurement type. That alignment usually tells you where the pipeline first deviated from the assumptions.
12.5 Case Study: Modeling a Perturbed Orbit with Estimation and Validation
This case study models a low Earth orbit with realistic perturbations, estimates the orbit from synthetic tracking data, and validates the result using independent checks. The goal is not just to get a plausible orbit, but to prove that the model, estimation, and validation steps agree with each other.
Mind Map: Modeling a Perturbed Orbit with Estimation and Validation
Scenario Setup
Assume a near-circular orbit at about 700 km altitude with inclination near 98°. Start with a “truth” state vector and a separate “initial guess” that is slightly wrong: for example, position error of 2–5 km and velocity error of 5–20 m/s. Use a time span of one to two orbital periods so that perturbations show up without making the problem huge.
Choose perturbations that are easy to model but not trivial. Include Earth oblateness via J2 and atmospheric drag using a simple exponential density law. Keep solar radiation pressure off so the residuals can be attributed to the included effects.
For measurements, use a realistic mix: range and range-rate from a ground station, sampled every few minutes. Add Gaussian noise consistent with the sensor model, such as 10–50 m for range and 0.05–0.5 m/s for range-rate.
Dynamics Model Construction
Use a numerical propagator that integrates the spacecraft state under the combined acceleration:
- Central gravity: \(\mu r^{-3} r\)
- J2 acceleration: computed from the standard zonal harmonic terms using Earth’s equatorial radius and J2 coefficient
- Drag acceleration: \(a_d = -\tfrac{1}{2} \rho C_d A/m, v_{rel}^2, \hat{v}_{rel}\)
Best practice: compute \(v_{rel}\) in the atmosphere-fixed frame, not the inertial frame. A common mistake is to use inertial velocity directly; the resulting drag direction is wrong, and the estimator will fight the model.
Observation Modeling and Residuals
Convert each propagated state to predicted observables at the measurement times. For range and range-rate, account for Earth rotation when computing the ground station position in the inertial frame. If you include light-time, iterate once or twice; for LEO, the correction is small but not always negligible.
Define residuals as \(\tilde{y} = y_{meas} - y_{pred}\). Plot residuals versus time and versus elevation angle. If residuals grow at low elevation, the issue is often geometry or station modeling rather than dynamics.
Estimation Procedure
Estimate the orbit by adjusting a parameter vector. A practical choice is to estimate the initial state in an inertial frame, using a batch least squares approach over the measurement window.
- Linearize the observation model around the current guess.
- Compute the sensitivity (state-to-observable mapping) using either numerical differentiation or variational equations.
- Solve the normal equations with measurement weights from the noise model.
- Iterate until residuals stop improving.
Best practice: constrain the update size. If the first iteration jumps too far, the linearization breaks and the solver may converge to a “fit” that is dynamically inconsistent.
Mind Map: Model, Estimate, Validate
Validation Checks That Actually Catch Errors
Use three validation layers.
1. Holdout Measurements: Fit using the first half of the data, then predict the second half without re-estimating parameters. If the model is correct, residual statistics should match the training window.
2. Covariance Consistency: If you compute an estimated covariance \(P\), check that normalized residuals behave like unit-variance noise. A systematic mismatch suggests either under-modeled forces (e.g., missing drag variability) or incorrect noise scaling.
3. Physical Trend Sanity: Even if residuals look good, verify that element trends are plausible. For example, J2 should drive nodal regression with the expected sign for the inclination, and drag should slowly reduce semi-major axis. If the fitted orbit requires drag to act opposite to the expected direction, the frame handling is likely wrong.
Concrete Example Outcome
In a typical run, including J2 and drag reduces range residual RMS from hundreds of meters (two-body only) to tens of meters. Residuals versus elevation flatten when Earth rotation and station geometry are handled correctly. When drag ballistic coefficient is slightly mis-modeled, the estimator still fits the data, but holdout residuals show a bias pattern over time—an indicator that the model is missing a time-varying aspect of density or \(C_d A/m\).
The key lesson is that validation should be independent of the fit. If the orbit “works” only on the data used to estimate it, the model is probably compensating for a structural mismatch rather than representing the physics.